一种基于光声谱多组分装置与信号处理方法
1.本发明涉及光声成像技术领域,具体涉及一种基于亥姆霍兹谐振光声池的差分信号采集系统与支持向量机方法对光声谱的多组分模型处理的方法。
背景技术:
2.在空气检测,有害气体检测,排放尾气检测领域中,对高灵敏度,高精度检测系统的需求越来越大,本专利实现了气体中的成分高精度的检测。光声谱是基于光声效应的一种光谱技术,它是将光声信号有效的转换成声音信号,通过超声传感器进行检测,不同的组成成分会产生不同的信号特征,非常适合用于检测空气的组成成分,能快速且有效的检测出气体中的成分。
3.光声池作为光声信号产生的来源,是光声谱测量系统中的重要的组成成分,其性能直接影响到光声测量灵敏性和准确性。光声池通常非为谐振式和非谐振式。谐振式光声池在去除噪声和想干信号干扰方面有着很好的性能,所以本专利采用差分亥姆霍兹谐振光声池,此光声池将信号做差分运算,能够得到去除噪声和相干信号干扰的光声信号。
4.支持向量机(svm)是一种新的机器学习算法,其基础是vapnik创建的统计学习理论。统计学习理论采用结构风险最小化(srm)准则,在最小化样本点误差的同时,最小化模型的结构风险,提高了模型的泛化能力,为多组分混合气体浓度定量分析提供了新的方法。
5.现有的技术中,已报道的有公开申请cn108226050a“一种用于气体光声谱检测的谐振式光声池”,其公开了利用谐振式光声池来消除超声信号中的噪音和相干信号。但是该专利没有对超声信号进行组分分析,并且没有说明完整的测量装置和过程,本专利除了差分亥姆霍兹谐振光声池外,还在配置了温度传感器,压力传感器,功率计,差分放大器,波长计,脉冲激光发射器,激光控制器,微控制器,计算机,比起该专利测出信号后需要额外的处理,本专利提供的方法极大的提高了空气组分的测量速度,也提高了测量准确性。
技术实现要素:
6.本发明的目的在于:提供了一种基于亥姆霍兹谐振光声池的差分信号采集与支持向量机方法对光声谱的多组分模型处理的系统,解决了光声信号中的噪声和其他相干信号干扰的问题,并且进一步使用对声信号进行组分建模和提取。
7.本发明为解决上述技术问题采用以下技术方案:
8.一种基于亥姆霍兹谐振光声池的差分信号采集装置,包括波长计,激光控制器,激光器,亥姆霍兹谐振光声池,超声传感器,功率计,差分放大器,温度传感器,压力传感器,微处理器,计算机;所述微处理器连接激光控制器,控制激光器的使用,所述波长计,功率计,压力传感器,温度传感器与微处理器相连,将数据传给微处理器;所述微处理器与计算机相连,将超声信号数据传给计算机。
9.上述技术方案中,亥姆霍兹谐振光声池横截面形状为“回”字型。光声池包括相互连同的第一光声室和第二光声室,这两个光声室通过第一连接细管和第二连接细管相互连
通;
10.上述技术方案中,超声换能器放置在第一光声室中,超声换能器放置在第二光声室中;
11.上述技术方案中,所述差分放大器共模抑制比约为80
‑
130分贝。
12.本发明还提供了一种基于亥姆霍兹谐振光声池的差分信号采集装置的信号处理方法,根据已有的超声信号数据,利用非线性映射,将输入的超声信号数据映射到高维空间,在高维空间进行回归分析,建立多维超声信号与混合气体组分浓度的函数模型,通过函数模型对采集到的超声信号数据进行分析,得到预测气体浓度。
13.上述技术方案中,已知气体浓度样本数据集为{(x
i
,y
i
)(i=1,...,n)},其中x
i
∈r
s
为第i个混合气体样本,r
s
为气体样本集合,x
i
=(x1,x2,...,x
l
)为在扫描波长范围内l个超声信号数据,y
i
∈r为对应的混合气体样本组分浓度值,r为实数集合,y
i
=(y1,y2,...,y
m
)为混合气体m个组分浓度,在高维空间需要求解的多维超声信号与预测混合气体组分浓度信息的回归函数f(x
i
)可表示为如下形式:
14.f(x
i
)=ω
·
φ(x
i
)+b
15.式中:ω
·
φ(x
i
)向量ω与φ(x
i
)的内积;ω的维数为高维空间维数:b为阈值,b∈r。
16.通过引入拉格朗日乘子,我们就可以基于约束条件来表述原来的问题。由于这里的约束条件都是基于数据点的,因此我们就可以将超平面写成数据点的形式。于是,优化目标函数最后可以写成:
17.对目标函数进行优化得到预测气体浓度表示f(x)
[0018][0019]
令k(x
i
,x)=<φ(x
i
)
·
φ(x)>
[0020][0021]
x是待测气体,x
i
是训练集中的气体样本,α
i
为拉格朗日乘子。
附图说明
[0022]
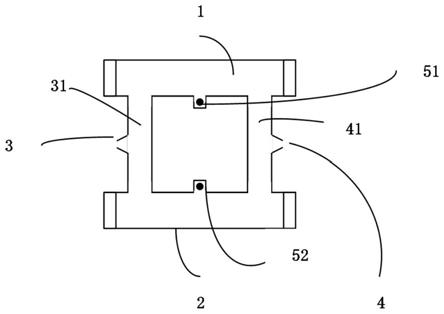
图1是本发明中的差分亥姆霍兹谐振光声池原理图。
[0023]
图2是本发明的测量系统结构示意图。
[0024]
图3是支持向量机地算法流程图。
[0025]
图4是支持向量机算法结构图。
[0026]
附图标号:对于图1,1
‑
第一光声室,2
‑
第二光声室,3
‑
出气口,31
‑
第一连接细管,41
‑
第二连接细管,4
‑
进气口,51
‑
超声换能器,52
‑
超声换能器,6
‑
温度传感器,7
‑
压力传感器,8
‑
功率计,9
‑
差分放大器,10
‑
差分亥姆霍兹谐振光声池,11
‑
波长计,12
‑
脉冲激光发射器,13
‑
激光控制器,14
‑
微控制器,15
‑
计算机。
具体实施方式
[0027]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明,即所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0028]
所述差分亥姆霍兹谐振光声池的横截面形状为“回”字型。光声池包括相互连同的第一光声室1和第二光声室2,这两个光声室通过第一连接细管31和第二连接细管41相互连通。超声换能器51放置在第一光声室1中,超声换能器51放置在光声室2中,具体位置如图1所示。
[0029]
待测气体从所述进入口4中进入光声池中,因为该光声池关于入气口4和出气口3完全对称,待出气口3开始排出待测气体,说明第一光声室1和第二光声室2会对称充满待测气体。
[0030]
所述微处理器14控制激光控制器13打开激光器12,激光束穿过波长计11,进入到第一光声室1中。
[0031]
所述波长计采集到激光的波长后,将数据传给微处理器14。
[0032]
所述第一光声室1中的测气体会吸收激光后,会发生热膨胀,产生超声信号;而第二光声室2中的待测气体没有产生热膨胀,故不会产生超声信号,超声换能器51和超声换能器52,分别同时将数据传入差分放大器16。
[0033]
所述差分放大器16将两个光声室中的信号相减,得到去除噪声和相干干扰的超声信号,再将信号输出到微处理器14中。
[0034]
所述压力传感器6和温度传感器7将测量到的数据传到微处理器14中。
[0035]
所述微处理器14将所用数据输出到计算机15中。
[0036]
所述计算机中地算法已对常见地气体进行训练。已知浓度的多组分混合气体样本作为算法的输入,进行训练;算法训练后可获得支持向量及对应权值;
[0037]
所述测得地超声信号传入计算机后,用训练后的支持向量及对应权值对未知的多组分待测气体超声信号进行检验,得到气体各组分浓度结果输出。
[0038]
发明的工作原理:所述激光器与激光调制器相连接,并受到激光调制器的控制,可以输出相应的波长和脉宽信号,可以在不同波长和脉宽下工作,所述激光射入到光声池的第一光声室中(如图1中的标号1所示),从而使得该光声室中的待测气体发生热膨胀并挤压另一个光声室(如图1中的标号2所示)中的待测气体,所述两个超神换能器分别用于检测所述待测气体所在光声室中产生的声音信号,并将输出端接入所述差分放大器的两个输入端,差分放大器将所述的两个信号相减,以获得去除噪声和相干干扰的信号。
[0039]
进一步地,差分放大器的输出端连接微处理器。
[0040]
可选地,因为(u为声音的传播速度,a为光声室的横截面,v为光声室体积,l为长度)计算出,亥姆霍兹谐振频率(200
‑
600hz)下的声波波长(0.56
‑
1.6m)。为了避免产生相干干扰,故两个麦克风之间的距离应小于声波波长,可以设置为约为0.1m。
[0041]
可选地,根据放大性能,差分放大器共模抑制比约为80
‑
130分贝。
[0042]
进一步地,激光通过波长计后,波长计将计算出来地波长数据发送给微处理器。
[0043]
进一步地,温度传感器和压力传感器将测的数据发送给微处理器。
[0044]
进一步的,微处理器将数据汇总发送给计算机。
[0045]
一种基于支持向量机对光声谱的多组分模型处理的方法,超声信号混合气体浓度定量分析的思路是根据已有的超声信号数据,利用非线性映射,将输入的超声信号数据映射到高维空间,在高维空间进行回归分析,建立多维超声信号与混合气体组分浓度的函数模型。
[0046]
进一步地,超声信号与混合气体组分浓度的函数难于表示,定义为如下地svm回归函数:
[0047]
已知气体浓度样本数据集为{(x
i
,y
i
)(i=1,...,n)},其中x
i
∈r
s
为第i个混合气体样本,x
i
=(x1,x2,...,x
l
)为在扫描波长范围内l个超声信号数据,y
i
∈r为对应的混合气体样本组分浓度值,y
i
=(y1,y2,...,y
m
)为混合气体m个组分浓度。在高维空间需要求解的多维超声信号与混合气体组分浓度的回归函数f(x
i
)可表示为如下形式:
[0048]
f(x
i
)=ω
·
φ(x
i
)+b(1)
[0049]
式中:ω
·
φ(x
i
)向量ω与φ(x
i
)的内积;ω的维数为高维空间维数:b为阈值.b∈r。
[0050]
为了求解ω和b,引入松弛变量ξ,ξ
*
≥0,根据srm准则,可以将式(1)写成:
[0051][0052]
其约束条件为:
[0053][0054]
式中:c是惩罚系数,c越大表示对训练误差大于ε的样本惩罚越大。ε规定了回归函数与混合气体样本的误差要求,ε越小,回归函数与混合气体样本的误差越小,估计精度越高。
[0055]
对于式(2)的求解可以引入拉格朗日乘数法进行优化求解:
[0056][0057]
拉格朗日函数l的极值满足下面条件;
[0058][0059]
将式(5)带入到式(4)中,可得到优化问题的对偶形式:
[0060][0061]
约束条件为:
[0062][0063]
进一步地,
[0064][0065]
k(x
i
,x)=<φ(x
i
)
·
φ(x)>
[0066]
y
i
是为测量气体成分中的实际浓度,回归函数f(x)表示预测气体浓度。进一步地,算法结构如图4所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1