基于多源卫星测高数据的水位测量及变化监测方法及装置与流程
1.本发明涉及卫星监测技术领域,具体涉及一种基于多源卫星测高数据的水位测量及变化监测方法及装置。
背景技术:
2.湖库水位对气候变化和人类活动的响应非常敏感,是湖泊动态变化监测的一个重要内容。传统的湖库水位获取方式是通过地面水文监测站,虽然具有测量精度高、观测频次连续等优点,但也存在因地域及成本问题无法大规模建立水文站的问题。近年来,卫星测高技术已发展成为湖库水位监测的重要手段。与传统湖库水位监测方法相比,它可以快速、实时、全天候地获取精度较高、范围更广的湖泊水位信息,对分布在高山、高原或者偏远地区缺乏地面水位监测站的湖泊、水库可以近实时进行水位监测,为湖库水位变化研究提供科学的数据保障。为了对湖库水位进行更全面的研究,乃至对湖库水位的准确预测,需要获取湖库水位长时间序列的数据,但是目前的卫星使用寿命有限、覆盖能力有限,通过一个卫星上搭载的测高系统难以完成对同一湖库的长序列的数据采集,而不同的卫星所搭载的测高系统不同,不同测高系统获取的水位信息无法直接应用于对同一湖库水位变化的研究。由此可见,综合多源卫星测高数据,实现高程基准统一,满足湖库长时间序列的水位变化监测研究非常必要。
技术实现要素:
3.因此,本发明要解决的技术问题在于克服现有技术中的通过卫星测高数据对长时间序列的水位变化研究较为困难的缺陷,从而提供一种基于多源卫星测高数据的水位测量及变化监测方法及装置。
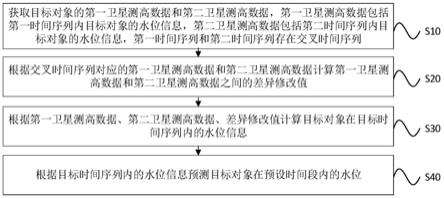
4.本发明第一方面提供了一种基于多源卫星测高数据的水位测量及变化监测方法,包括:获取目标对象的第一卫星测高数据和第二卫星测高数据,第一卫星测高数据包括第一时间序列内目标对象的水位信息,第二卫星测高数据包括第二时间序列内目标对象的水位信息,第一时间序列和第二时间序列存在交叉时间序列;根据交叉时间序列对应的第一卫星测高数据和第二卫星测高数据计算第一卫星测高数据和第二卫星测高数据之间的差异修改值;根据第一卫星测高数据、第二卫星测高数据、差异修改值计算目标对象在目标时间序列内的水位信息;根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位。
5.可选地,在本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中,获取目标对象的第一卫星测高数据和第二卫星测高数据的步骤,包括:获取第一初始卫星测高数据和第二初始卫星测高数据;分别根据与第一初始卫星测高数据和第二初始卫星测高数据相对应的约束参数对第一初始卫星测高数据和第二初始卫星测高数据进行筛选,得到第一卫星测高数据和第二卫星测高数据。
6.可选地,在本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中,
在获取目标对象的第一卫星测高数据和第二卫星测高数据的步骤之后,根据交叉时间序列对应的第一卫星测高数据和第二卫星测高数据计算第一卫星测高数据和第二卫星测高数据之间的差异修改值的步骤之前,还包括:若第一卫星测高数据和第二卫星测高数据的高程基准不同,根据目标高程基准对第一卫星数据和第二卫星数据进行修正。
7.可选地,在本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中,在根据第一卫星测高数据、第二卫星测高数据、差异修改值计算目标对象在目标时间序列内的水位信息的步骤之后,根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位的步骤之前,还包括:采用中位数绝对偏差方法过滤目标时间序列内的水位信息中不满足预设条件的水位信息。
8.可选地,在本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中,在根据第一卫星测高数据、第二卫星测高数据、差异修改值计算目标对象在目标时间序列内的水位信息的步骤之后,根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位的步骤之前,还包括:获取目标对象在目标时间序列内的面积信息;根据预设水位
‑
面积关系模型和目标对象的在目标时间序列内的面积信息获取目标时间序列中缺失的水位信息,预设水位
‑
面积关系模型根据目标对象在目标时间序列内的水位信息和面积信息的对应关系建立。
9.可选地,在本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中,根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位的步骤,包括:根据预设水位预测模型预测目标对象在目标时间段内的水位,预设水位预测模型根据目标时间序列内的水位信息与时间的对应关系建立。
10.可选地,在本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中,在根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位的步骤之后,还包括:若目标对象在预设时间段内的水位相对于预设时间段的上一时间段内的水位的变化量大于预设阈值,执行预警工作。
11.本发明第二方面提供了一种基于多源卫星测高数据的水位测量及变化监测装置,包括:测高数据获取模块,用于获取目标对象的第一卫星测高数据和第二卫星测高数据,第一卫星测高数据包括第一时间序列内目标对象的水位信息,第二卫星测高数据包括第二时间序列内目标对象的水位信息,第一时间序列和第二时间序列存在交叉时间序列;差异修改值计算模块,用于根据交叉时间序列对应的第一卫星测高数据和第二卫星测高数据计算第一卫星测高数据和第二卫星测高数据之间的差异修改值;水位信息修正模块,用于根据第一卫星测高数据、第二卫星测高数据、差异修改值计算目标对象在目标时间序列内的水位信息;水位预测模块,用于根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位。
12.本发明第三方面提供了一种计算机设备,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,从而执行如本发明第一方面提供的基于多源卫星测高数据的水位测量及变化监测方法。
13.本发明第四方面提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令用于使计算机执行如本发明第一方面提供的基于多源卫星测高数据
的水位测量及变化监测方法。
14.本发明技术方案,具有如下优点:
15.1.本发明提供的基于多源卫星测高数据的水位测量及变化监测方法,在对目标对象的水位进行检测时,所使用的数据为卫星测高数据,相较于通过水文站获取数据,本发明中使用的卫星测高数据在获取时不受地域限制,因此第一卫星测高数据和第二卫星测高数据都包括目标对象的更完整的数据,本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中获取的第一卫星测高数据和第二卫星测高数据的时间序列存在交叉序列,通过交叉序列对应的第一卫星测高数据和第二卫星测高数据可以计算得到第一卫星测高数据和第二卫星测高数据之间的差异修改值,从而根据差异修改值将第一卫星测高数据和第二卫星测高数据进行拼接,得到目标对象在长时间序列内的水位信息,实现对目标对象长时间序列的水位测量,本发明还根据长时间序列内的水位信息对目标对象在预设时间段内的水位进行准确预测,实现了对目标对象的水位的变化监测。由此可见,通过实施本发明,即使在单个卫星寿命较短、覆盖能力有限,不同的卫星搭载的测高系统的情况下,也能综合多类卫星数据,实现对长时间序列的水位变化进行研究。
16.2.本发明提供的基于多源卫星测高数据的水位测量及变化监测方法,在获取第一初始卫星测高数据和第二初始卫星测高数据后,分别根据与第一初始卫星测高数据和第二初始卫星测高数据相对应的约束参数对第一初始卫星测高数据和第二初始卫星测高数据进行筛选,通过约束参数对第一初始卫星测高数据和第二初始卫星测高数据进行筛选,可以剔除质量较差的测高数据,从而保证实施本发明可以对目标对象的水位进行准确检测。
17.3.本发明提供的基于多源卫星测高数据的水位测量及变化监测方法,当目标时间序列内的水位信息中存在缺失数据时,本发明提供的基于多源卫星测高数据的水位测量及变化监测方法通过目标时间序列内的面积信息对水位信息进行了填补,得到了完整的水位信息,目标时间序列内的完整的水位信息为目标对象在预设时间段内的水位的准确预测提供了保障。
18.4.本发明提供的基于多源卫星测高数据的水位测量及变化监测装置,在对目标对象的水位进行检测时,所使用的数据为卫星测高数据,相较于通过水文站获取数据,本发明中使用的卫星测高数据在获取时不受地域限制,因此第一卫星测高数据和第二卫星测高数据都包括目标对象的更完整的数据,本发明提供的基于多源卫星测高数据的水位测量及变化监测装置中获取的第一卫星测高数据和第二卫星测高数据的时间序列存在交叉序列,通过交叉序列对应的第一卫星测高数据和第二卫星测高数据可以计算能得到第一卫星测高数据和第二卫星测高数据之间的差异修改值,从而根据差异修改值将第一卫星测高数据和第二卫星测高数据进行拼接,得到目标对象在长时间序列内的水位信息,实现对目标对象长时间序列的水位测量,本发明还根据长时间序列内的水位信息对目标对象在预设时间段内的水位进行准确预测,实现了对目标对象的水位的变化监测。由此可见,通过实施本发明,即使在单个卫星寿命较短、覆盖能力有限,不同的卫星搭载的测高系统的情况下,也能综合多类卫星数据,实现对长时间序列的水位变化进行研究。
附图说明
19.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体
实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本发明实施例中基于多源卫星测高数据的水位测量及变化监测方法的一个具体示例的流程图;
21.图2a为本发明实施例中高分七号卫星激光测高仪水体区域足印影像;
22.图2b为本发明实施例中高分七号卫星激光测高仪回波波形图;
23.图3为本发明实施例中哈拉湖在2002~2019年间的时间与水位的对应关系示意图;
24.图4为本发明实施例中基于多源卫星测高数据的水位测量及变化监测方法的另一具体示例的流程图;
25.图5为本发明实施例中基于多源卫星测高数据的水位测量及变化监测方法的另一具体示例的流程图;
26.图6为本发明实施例中卫星测高基本原理示意图;
27.图7为本发明实施例中基于多源卫星测高数据的水位测量及变化监测方法的另一具体示例的流程图;
28.图8为本发明实施例中基于多源卫星测高数据的水位测量及变化监测方法的另一具体示例的流程图;
29.图9为本发明实施例中青海湖的面积和水位的对应关系示意图;
30.图10为本发明实施例中根据水位
‑
面积关系模型填充后的目标时间序列内的水位信息示意图;
31.图11为本发明实施例中基于多源卫星测高数据的水位测量及变化监测装置的一个具体示例的原理框图;
32.图12为本发明实施例中计算机设备的原理框图。
具体实施方式
33.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.在本发明的描述中,需要说明的是,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
35.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
36.本发明实施例提供了一种基于多源卫星测高数据的水位测量及变化监测方法,如图1所示,包括:
37.步骤s10:获取目标对象的第一卫星测高数据和第二卫星测高数据,第一卫星测高数据包括第一时间序列内目标对象的水位信息,第二卫星测高数据包括第二时间序列内目标对象的水位信息,第一时间序列和第二时间序列存在交叉时间序列。该目标对象是指水库、湖泊、河流等。第一卫星激光测高数据和第二卫星激光测高数据都由卫星搭载的测高系
统获取,第一时间序列为获取第一卫星激光测高数据的卫星的使用时间,第二时间序列为获取第二卫星激光测高数据的卫星的使用时间。
38.在一具体实施例中,第一卫星激光测高数据和第二卫星测高数据可以是卫星雷达测高数据,也可以是卫星激光测高数据,即,本发明实施例中可以将卫星雷达测高数据和卫星激光测高数据相结合,也可以将两种不同的卫星雷达测高数据相结合,也可已经将两种不同的卫星激光测高数据相结合,由于卫星激光测高数据的准确性相对于卫星雷达测高数据的准确性较高,因此,在具体实施例中,可以优先使用激光卫星测高数据。
39.卫星激光测高数据以高精度的icesat/glas、icesat
‑
2/atlas、高分七号等卫星激光测高数据为主,卫星雷达测高数据主要是指内陆水域水文时间序列数据集(database for hydrological time series of inland waters,dahiti),其中:
40.icesat卫星由美国国家航空航天局在2003年发射升空,2009年11月结束运行,搭载的激光测高仪,以40hz的频率向地面发射光束脉冲并记录从地面反射回来的回波,在地面形成间距约175m、直径约70米的光斑。icesat/glas数据从glah01到glah15共包含15级不同产品的数据,最新的数据版本为release 33。采用glah14全球高程数据,它包含了激光光斑脚点的经纬度、高程、波形饱和改正、反射率、云量标记等参数。
41.icesat
‑
2(ice,cloud and land elevation satellite
‑
2)搭载了先进的地形激光测高系统atlas(advanced topographic laser altimeter system),该卫星已于2018年9月15日成功发射。icsat
‑
2/atlas采用了微脉冲、高重频、多波束的光子计数技术,在覆盖能力以及测量精度方面比icesat/glas有很大的提升。atl13为atlas的全球内陆水体表面高程数据产品,通过使用湖泊边界矢量数据hydrolakes掩膜和全球湖泊湿地数据集来确定与水体相交的足印点。atl13数据能够观测到全球范围内面积大于0.01km2的湖泊、水库以及长度大于100m的河流等水体要素数量大约有150至200万个。
42.高分七号于2019年11月3日成功发射,配置了我国首台具有全波形记录与采样功能的激光测高仪。高分七号卫星激光测高仪指向在近似天底点方向垂轨平面内,并与天底点方向左右各成0.7
°
夹角形成2个波束,沿轨向点间距约2.4km。目前高分七号卫星激光测高仪的绝对指向测量精度约2.5
″
,在无风的平静湖泊水库表明,其坡度可近似看做0
°
,此时,侧摆角为1
°
时,高程误差约0.106m;侧摆角为2
°
时,高程误差约0.212m。在侧摆角较小时(比如限定为0.5
°
内),可以用于南北向长大于7.5km的湖泊水库10cm级的水位测量及监测,如图2a所示为具体实施例中高分七号卫星激光测高仪水体区域足印影像,如图2b所示为具体实施例中高分七号卫星激光测高仪回波波形。
43.dahiti是德国地质研究院在2013年开始构建的内陆水文时间序列数据库。截止目前,该数据集提供全球2799个湖泊、水库、河流及湿地的水位时间序列,其中我国境内的44个湖泊、水库、河流具有该数据集。dahiti数据集由多源测高卫星数据基于异常值剔除和扩展卡尔曼滤波算法得到,多源测高卫星数据包括envisat、cryosat
‑
2、sentinel
‑
3、saral/altika、jason
‑
1、jason
‑
2及jason
‑
3等雷达测高数据。该数据集将不同测高卫星数据统一到相同的参考椭球,同时消除不同测高卫星因仪器设备、运行轨道及重访周期等不同带来的系统高程误差。
44.步骤s20:根据交叉时间序列对应的第一卫星测高数据和第二卫星测高数据计算第一卫星测高数据和第二卫星测高数据之间的差异修改值。
45.在具体实施例中,若第一卫星测高数据和第二卫星测高数据是卫星通过不同的测量系统获取的数据,则两组数据之间存在差异,无法直接结合得到长时间序列的数据,需要先计算两组数据之间的差异修改值,然后基于差异修改值对两组数据进行统一化修正。
46.示例性地,在本发明实施例中,通过如下方式计算差异修改值:获取第一卫星测高数据在交叉时间序列内的某一时刻下的第一水位值h1以及相同时刻下第二卫星测高数据中的第二水位值h2,将第一水位值和第二水位值的差确定为差异修改值:δh=h1‑
h2。
47.步骤s30:根据第一卫星测高数据、第二卫星测高数据、差异修改值计算目标对象在目标时间序列内的水位信息:
48.h=h
i
+δh,
49.h为目标对象在目标时间序列内的某一时刻下的水位值,h
i
为与h相同时刻下的第一卫星测高数据中的值或第二卫星测高数据中的值。
50.步骤s40:根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位。
51.在一可选实施例中,在对目标对象在预设时间段内的水位进行预测时,可以根据预设水位预测模型进行预测,预设水位预测模型根据目标时间序列内的水位信息与时间的对应关系建立。
52.示例性地,可以根据目标时间序列内的水位信息,采用最小二乘法建立时间与水位的回归模型,从而获取目标对象的水位的变化趋势,如图3所示为哈拉湖在2002~2019年间的时间与水位的对应关系图,根据如图3所示的时间与水位的对应关系图得到的水位变化趋势为:y=0.16657x+4077.0869,其中,y表示水位,x表示时间。
53.本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测方法,在对目标对象的水位进行检测时,所使用的数据为卫星测高数据,相较于通过水文站获取数据,本发明中使用的卫星测高数据在获取时不受地域限制,因此第一卫星测高数据和第二卫星测高数据都包括目标对象的更完整的数据,本发明提供的基于多源卫星测高数据的水位测量及变化监测方法中获取的第一卫星测高数据和第二卫星测高数据的时间序列存在交叉序列,通过交叉序列对应的第一卫星测高数据和第二卫星测高数据可以计算能得到第一卫星测高数据和第二卫星测高数据之间的差异修改值,从而根据差异修改值将第一卫星测高数据和第二卫星测高数据进行拼接,得到目标对象在长时间序列内的水位信息,实现对目标对象长时间序列的水位测量,本发明实施例还根据长时间序列内的水位信息对目标对象在预设时间段内的水位进行准确预测,实现了对目标对象的水位的变化监测。由此可见,通过实施本发明实施例,即使在单个卫星寿命较短、覆盖能力有限,不同的卫星搭载的测高系统的情况下,也能综合多类卫星数据,实现对长时间序列的水位变化进行研究。
54.在一可选实施例中,在本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测方法中,如图4所示,上述步骤s10具体包括:
55.步骤s11:获取第一初始卫星测高数据和第二初始卫星测高数据。
56.第一初始卫星测高数据和第二初始卫星测高数据分别为未经筛选处理的第一卫星测高数据和第二卫星测高数据。
57.步骤s12:分别根据与第一初始卫星测高数据和第二初始卫星测高数据相对应的约束参数对第一初始卫星测高数据和第二初始卫星测高数据进行筛选,得到第一卫星测高数据和第二卫星测高数据。
58.在具体实施例中,对于不同的卫星测高数据,其对应的约束参数也有所不同,具体地,对于atlas数据,约束参数包括背景光子存在程度标志qf_bckgrd、电磁偏置质量标志qf_bias_em、高度偏差拟合质量标志qf_bias_fit、云量控制标记layer_flag_atl09,对atlas数据进行筛选具体包括:
59.判断atlas数据是否满足以下条件:
60.背景光子存在程度标志0≤qf_bckgrd≤6;
61.电磁偏置质量标志
‑
3≤qf_bias_em<4;
62.高度偏差拟合质量标志
‑
3≤qf_bias_fit<4;
63.云量控制标记layer_flag_atl09的值等于0或1;
64.删除atlas数据中不满足上述任一条件的数据;
65.删除atlas数据中不满足上述任一条件的数据后,使用atl13首光子偏置修正标识(first photon bias,fpb)修正有效湖泊激光点的atl13水位值。
66.对于高分七号卫星激光测高数据,约束参数包括回波波峰数、回波脉宽、回波波形饱和度、足印影像上的云量、落在目标对象水面上的点的数量,对高分七号卫星激光测高数据进行筛选具体包括:
67.判断高分七号卫星激光测高数据是否满足以下条件:
68.回波波峰数等于1;
69.回波脉宽≤发射脉宽+0.5ns;
70.回波波形不饱和,且波形的信噪比snr是否>15;
71.足印影像上是否无云(即云量是否=0);
72.是否至少有3个点落在同一个目标对象水面;
73.删除高分七号卫星激光测高数据中不满足上述任一条件的数据。
74.本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测方法,在获取第一初始卫星测高数据和第二初始卫星测高数据后,分别根据与第一初始卫星测高数据和第二初始卫星测高数据相对应的约束参数对第一初始卫星测高数据和第二初始卫星测高数据进行筛选,通过约束参数对第一初始卫星测高数据和第二初始卫星测高数据进行筛选,可以剔除质量较差的测高数据,从而保证实施本发明可以对目标对象的水位进行准确检测。
75.在一可选实施例中,在本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测方法中,如图5所示,在上述步骤s10之后,在步骤s20之前,还包括:
76.步骤s51:判断第一卫星测高数据和第二卫星测高数据的高程基准是否不同,若第一卫星测高数据和第二卫星测高数据的高程基准不同,执行步骤s52,若相同,执行步骤s20。
77.步骤s52:根据目标高程基准对第一卫星数据和第二卫星数据进行修正。
78.在具体实施例中,如图6所示,卫星测高基本原理为通过卫星上搭载的激光测高仪或雷达高度计,测量向下点发射脉冲和接受脉冲的时间差,计算卫星质心到星下点地面间的瞬时距离,具体计算公式为:
79.80.h
ortho
=h
alt
‑
h
ran
‑
h
geoid
‑
(δ
iono
+δ
dry
+δ
wet
+δ
set
+δ
pol
),
81.其中,h
ran
为卫星质心到地面的距离;c为光速;δt为发射脉冲与接收脉冲的时间差;h
ortho
为湖泊水位正高;h
alt
为测高仪的椭球高;h
geoid
为大地水准面相对于参考椭球面的高程;δ
iono
为电离层修正项;δ
dry
为干对流层修正项;δ
wet
为湿对流层修正项;δ
set
为固体潮修正项;δ
pol
为极潮修正项。
82.由于不同测高卫星产品存在一定的星间系统偏差,同时有些高程基准也不统一,例如dahiti测高数据的高程基准是eigen
‑
6c4,而icesat
‑
2/atl13测高数据的高程基准是egm2008。为了将不同的卫星测高数据结合得到长时间序列的数据,需要消除不同测高卫星间的系统偏差,将测高产品统一到同一高程基准下,然后将同一高程基准后的数据进行结合。
83.在本发明实施例中,以目标高程基准为egm2008为例,对于采用wgs84大地高的高分七号等卫星激光测高数据,将其采用egm2008模型转换到正高基准的公式为:
84.hortho=hg
‑
ξ,
85.其中,hg为激光点在wgs84椭球下的大地高,ξ为采用egm2008模型计算的大地水准面改正值,ξ也可根据其他大地水准面模型计算。
86.对于采用topex/poseidon(t/p)卫星参考椭球的icesat/glas产品高程,将其采用egm2008模型转换到正高基准的公式:
87.hortho=hg
‑
ξ
‑
δh,
88.其中,δh为两个椭球间的高程差,δh=
‑
cos
2 bda
‑
sin2bdb,其中b为纬度,da、db为两个参考椭球长轴、短轴之间的差值。
89.在一可选实施例中,获取的第一卫星测高数据和第二卫星测高数据可能存在数据缺失,也可能在对第一卫星测高数据和第二卫星测高数据进行过滤筛选过程中导致了数据缺失,因此,在本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测方法中,如图7所示,在上述步骤s30之后,步骤s40之前,还包括:
90.步骤s60:采用中位数绝对偏差方法过滤目标时间序列内的水位信息中不满足预设条件的水位信息。
91.在具体实施例中,中位数绝对偏差方法具有很强的粗差探测能力,可以有效识别湖泊水位高程异常值,其粗差探测计算方法如下式所示:
92.mad=1.4826m(|a1‑
m(a1,...,a
n
)|,...,|a
n
‑
m(a1,...,a
n
)|)
93.h
outlier
<m(a1,...,a
n
)
‑3·
mad or h
outlier
>m(a1,...,a
n
)+3
·
mad,
94.式中,a1,...,a
n
是沿轨高程序列;m是高程序列中位数;h
outlier
是高程粗差值。
95.在本发明实施例中采用中位数绝对偏差(median absolute deviation,mad)剔除沿轨高程粗差值,可以得到沿轨有效激光高程点并求其均值作为沿轨湖泊水位值。
96.在一可选实施例中,在本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测方法中,如图8所示,在上述步骤s30之后,步骤s40之前,还包括:
97.步骤s71:获取目标对象在目标时间序列内的面积信息。
98.在具体实施例中,针对光学卫星影像,首先用大型内陆湖库边界数据集(如hydrolake)对相应的湖泊水库位置及边界进行大致定位,并建立2
‑
5km的一定缓冲区。采用归一化差分水体指数ndwi(normalized difference water index),利用绿色波段(0.52
‑
0.60μm)和近红外波段(0.76
‑
0.96μm)进行单波段比值,其原理将水体高反射率所在的绿色波段和低反射率所在的近红外波段作比值,将水体的区域突显出来。归一化水体指数计算公式为:
[0099][0100]
式中:rgreen为绿色波段,rnir为近红外波段。
[0101]
当ndwi>0时所对应的像元为疑似水体,对水体对象和缓冲区的像素进行频率直方图统计,利用双峰直方图进行阈值分割,进一步确定水体边界,从而根据水体边界计算目标对象的面积信息。
[0102]
步骤s72:根据预设水位
‑
面积关系模型和目标对象的在目标时间序列内的面积信息获取目标时间序列中缺失的水位信息,预设水位
‑
面积关系模型根据目标对象在目标时间序列内的水位信息和面积信息的对应关系建立。
[0103]
在一具体实施例中,在获取目标对象在不同时期的面积信息后,获取与面积信息同时期的水位信息,然后根据目标对象在各时期的面积信息和水位信息建立水位
‑
面积关系模型。如图9所示为青海湖的面积和水位的对应关系,在建立水位
‑
面积关系模型时,可以根据水位信息和面积信息建立多项式模型:
[0104]
h=a1s+a2s2+a3s3+...+b,
[0105]
其中,h为水位值,s为面积值。
[0106]
具体实施例中,也可直接采用一次多项式,即线性模式h=a
·
s+b,如图9所示建立的模型为y=0.0084554x+3158.4658。
[0107]
在得到水位
‑
面积关系模型后,可以根据缺失水位信息的时间段内的面积信息将该时间段内的水位信息补全,从而得到完整的水位信息,在一具体实施例中,根据水位
‑
面积关系模型填充后的目标时间序列内的水位信息如图10所示。
[0108]
在一可选实施例中,在执行上述步骤s40得到目标对象在预设时间段内的水位以后,若预测结果相对于预设时间段的上一时间段内的变化量大于预设阈值,则执行预警工作,预设阈值的值可以根据最新的卫星激光测高数据确定,例如,可以将预设阈值设置为0.5m,若测量结果相对于预设时间段的上一时间段内的变化量大于0.5m,则执行预警工作。
[0109]
本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测方法,可以根据目标时间序列内的水位信息对目标对象在预设时间段内的水位进行预测,当预测结果相对于上一时间段内的水位的变化量大于预设阈值时,执行预警工作,因此实施本发明可以及时对目标对象进行保护。
[0110]
本发明实施例还提供了一种基于多源卫星测高数据的水位测量及变化监测装置,如图11所示,包括:
[0111]
测高数据获取模块10,用于获取目标对象的第一卫星测高数据和第二卫星测高数据,第一卫星测高数据包括第一时间序列内目标对象的水位信息,第二卫星测高数据包括第二时间序列内目标对象的水位信息,第一时间序列和第二时间序列存在交叉时间序列,详细内容参见上述实施例中对步骤s10的描述,在此不再赘述。
[0112]
差异修改值计算模块20,用于根据交叉时间序列对应的第一卫星测高数据和第二卫星测高数据计算第一卫星测高数据和第二卫星测高数据之间的差异修改值,详细内容参
见上述实施例中对步骤s20的描述,在此不再赘述。
[0113]
水位信息修正模块30,用于根据第一卫星测高数据、第二卫星测高数据、差异修改值计算目标对象在目标时间序列内的水位信息,详细内容参见上述实施例中对步骤s30的描述,在此不再赘述。
[0114]
水位预测模块40,用于根据目标时间序列内的水位信息预测目标对象在预设时间段内的水位,详细内容参见上述实施例中对步骤s40的描述,在此不再赘述。
[0115]
本发明实施例提供的基于多源卫星测高数据的水位测量及变化监测装置,在对目标对象的水位进行检测时,所使用的数据为卫星测高数据,相较于通过水文站获取数据,本发明中使用的卫星测高数据在获取时不受地域限制,因此第一卫星测高数据和第二卫星测高数据都包括目标对象的更完整的数据,本发明提供的基于多源卫星测高数据的水位测量及变化监测装置中获取的第一卫星测高数据和第二卫星测高数据的时间序列存在交叉序列,通过交叉序列对应的第一卫星测高数据和第二卫星测高数据可以计算能得到第一卫星测高数据和第二卫星测高数据之间的差异修改值,从而根据差异修改值将第一卫星测高数据和第二卫星测高数据进行拼接,得到目标对象在长时间序列内的水位信息,实现对目标对象长时间序列的水位测量,本发明实施例还根据长时间序列内的水位信息对目标对象在预设时间段内的水位进行准确预测,实现了对目标对象的水位的变化监测。由此可见,通过实施本发明,即使在单个卫星寿命较短、覆盖能力有限,不同的卫星搭载的测高系统的情况下,也能综合多类卫星数据,实现对长时间序列的水位变化进行研究。
[0116]
本发明实施例还提供了一种计算机设备,如图12所示,该计算机设备主要包括一个或多个处理器51以及存储器52,图12中以一个处理器51为例。
[0117]
该计算机设备还可以包括:输入装置53和输出装置54。
[0118]
处理器51、存储器52、输入装置53和输出装置54可以通过总线或者其他方式连接,图12中以通过总线连接为例。
[0119]
处理器51可以为中央处理器(central processing unit,cpu)。处理器51还可以为其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现场可编程门阵列(field
‑
programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等芯片,或者上述各类芯片的组合。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。存储器52可以包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需要的应用程序;存储数据区可存储根据基于多源卫星测高数据的水位测量及变化监测装置的使用所创建的数据等。此外,存储器52可以包括高速随机存取存储器,还可以包括非暂态存储器,例如至少一个磁盘存储器件、闪存器件、或其他非暂态固态存储器件。在一些实施例中,存储器52可选包括相对于处理器51远程设置的存储器,这些远程存储器可以通过网络连接至基于多源卫星测高数据的水位测量及变化监测装置。输入装置53可接收用户输入的计算请求(或其他数字或字符信息),以及产生基于多源卫星测高数据的水位测量及变化监测装置有关的键信号输入。输出装置54可包括显示屏等显示设备,用以输出计算结果。
[0120]
本发明实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储计算机指令,计算机存储介质存储有计算机可执行指令,该计算机可执行指令可执行上述任
意方法实施例中的基于多源卫星测高数据的水位测量及变化监测方法。其中,存储介质可为磁碟、光盘、只读存储记忆体(read
‑
only memory,rom)、随机存储记忆体(random access memory,ram)、快闪存储器(flash memory)、硬盘(hard disk drive,缩写:hdd)或固态硬盘(solid
‑
state drive,ssd)等;存储介质还可以包括上述种类的存储器的组合。
[0121]
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1