光纤陀螺仪节能方法及系统与流程
1.本发明涉及光纤陀螺仪技术领域,尤其涉及一种光纤陀螺仪节能方法及系统。
背景技术:
2.陀螺仪作为一种精密导航器件,对导航系统十分重要,随着光纤陀螺仪的发展,逐渐向小型化、低功耗方向发展。特别是使用电池供电的场景下,为保证续航时间,陀螺仪的低功耗或者电池低电量下的低功耗模式研究具有十分重要的意义。
3.光纤陀螺仪由于存在激光器、高精度逻辑器件等,一般功率在几十毫瓦以上,这对于使用电池供电,且需要长时间工作的设备来,降低其功耗更具有重要的现实意义;特别是在电池电量低的情况下,如何延长使用时间变得十分重要。
技术实现要素:
4.本发明目的在于公开一种光纤陀螺仪节能方法及系统,以大幅降低系统功耗,延长设备使用时间。
5.为达上述目的,本发明公开一种光纤陀螺仪节能方法,包括:
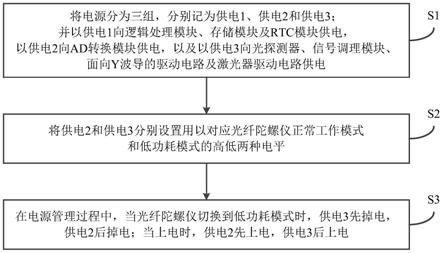
6.步骤s1、将电源分为三组,分别记为供电1、供电2和供电3;并以供电1向逻辑处理模块、存储模块及rtc模块供电,以供电2向ad转换模块供电,以及以供电3向光探测器、信号调理模块、面向y波导的驱动电路及激光器驱动电路供电;
7.步骤s2、将供电2和供电3分别设置用以对应光纤陀螺仪正常工作模式和低功耗模式的高低两种电平;
8.步骤s3、在电源管理过程中,当光纤陀螺仪切换到低功耗模式时,供电3先掉电,供电2后掉电;当上电时,供电2先上电,供电3后上电。
9.优选地,本发明在电源管理过程中,当光纤陀螺仪处于匀加角速度或匀角速度运动的时长超过设定阈值时,进入间歇工作模式;以及当电池电量低于设定阈值时,强制进入间歇工作模式;其中,所述间歇式工作模式为光纤陀螺仪间歇性的工作在正常工作模式及低功耗模式下,且在所述间歇式工作模式中,一个正常的周期t由低功耗模式时长t1与正常工作模式时长t2组成。
10.优选地,在间歇式工作模式下,当光纤陀螺仪从正常工作模式切换到低功耗模式时,所述步骤s3包括:
11.步骤s311、将对外输出给y波导驱动电路的驱动信息存入存储器中,将ad转换模块输出信息记录到存储器中,并记录此时角速度w1;
12.步骤s312、将逻辑处理模块输出给激光器驱动及面向y波导的驱动电路的信号置位低电平;
13.步骤s313、控制供电3停止对外供电;
14.步骤s314、控制供电2停止对外供电;
15.当陀螺仪从低功耗状态返回正常工作状态时,所述步骤s3包括:
16.步骤s321、控制供电2开始对外供电;
17.步骤s322、控制供电3开始对外供电;
18.步骤s323、从存储器中调出进入低功耗模式前的y波导驱动电路信息;
19.步骤s324、逻辑处理模块正常输出给激光器驱动信号,并依照从存储器中读取的y波导驱动信息驱动面向y波导的驱动电路;
20.步骤s325、逻辑处理模块通过调整光通过y波导的延时计算出当前的角速度值w2,并根据低功耗模式前的角速度为w1和当前的角速度值w2确定低功耗时间段内的角速度。
21.优选地,若在正常工作时间段内角速度变化有固定规律,所述步骤s235关于低功耗时间段内的角速度确定包括:
22.若角加速度为a,进入低功耗模式前的角速度为w1,且经过低功耗时间t1之后依照公式可计算出w2’=w1+a*t1;将w2’与实际测试的角速度w2进行对比,若相等,则判断在t1时间段内陀螺仪所在系统依然保持匀加角速度运动;若不相等,计算比值k1=w2/w1,按照角加速度a计算的t1时间内的角速度乘以k1作为t1时间段内的角速度;
23.若在正常工作时间段内角速度变化没有固定规律或因电量低而强制进入间歇式工作模式时,取w1与w2的平均数作为t1时间内的角速度值。
24.为达上述目的,本发明还公开一种光纤陀螺仪节能系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
25.本发明具有以下有益效果:
26.本发明能大幅降低系统功耗,延长设备使用时间;而且光纤陀螺仪在正常工作模式和低功耗模式之间切换时,可以避免ad转换模块在获得供电前,前端有电平导致的ad工作异常或损坏的情况。而且,在间歇式工作模式中,能精确地传承和确定相关的状态参数;有效避免了因节能而影响设备的整体性能。
27.下面将参照附图,对本发明作进一步详细的说明。
附图说明
28.构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
29.图1是本发明实施例的光纤陀螺仪节能方法流程示意图。
30.图2是本发明实施例的光纤陀螺仪系统框图。
31.图3是本发明实施例的间歇工作模式下各组电源对应的时序与电平状态关系示意图。
具体实施方式
32.以下结合附图对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
33.实施例1
34.本实施例公开一种光纤陀螺仪节能方法,如图1所示,包括以下步骤:
35.步骤s1、将电源分为三组,分别记为供电1、供电2和供电3;并以供电1向逻辑处理
模块、存储模块及rtc模块供电,以供电2向ad转换模块供电,以及以供电3向光探测器、信号调理模块、面向y波导的驱动电路及激光器驱动电路供电。
36.在该步骤中,光纤陀螺仪的系统框图参照图2,其列出了各组供电所服务的功能模块。
37.步骤s2、将供电2和供电3分别设置用以对应光纤陀螺仪正常工作模式和低功耗模式的高低两种电平。
38.步骤s3、在电源管理过程中,当光纤陀螺仪切换到低功耗模式时,供电3先掉电,供电2后掉电;当上电时,供电2先上电,供电3后上电。
39.优选地,本发明在电源管理过程中,当光纤陀螺仪处于匀加角速度或匀角速度运动的时长超过设定阈值时,进入间歇工作模式;以及当电池电量低于设定阈值时,强制进入间歇工作模式。如图3所示,本实施例所述间歇式工作模式为光纤陀螺仪间歇性的工作在正常工作模式及低功耗模式下,且在所述间歇式工作模式中,一个正常的周期t由低功耗模式时长t1与正常工作模式时长t2组成。
40.优选地,在间歇式工作模式下,当光纤陀螺仪从正常工作模式切换到低功耗模式时,所述步骤s3包括:
41.步骤s311、将对外输出给y波导驱动电路的驱动信息存入存储器中,将ad转换模块输出信息记录到存储器中,并记录此时角速度w1。
42.步骤s312、将逻辑处理模块输出给激光器驱动及面向y波导的驱动电路的信号置位低电平。
43.步骤s313、控制供电3停止对外供电。
44.步骤s314、控制供电2停止对外供电。
45.相对应的,当陀螺仪从低功耗状态返回正常工作状态时,所述步骤s3包括:
46.步骤s321、控制供电2开始对外供电。
47.步骤s322、控制供电3开始对外供电。
48.步骤s323、从存储器中调出进入低功耗模式前的y波导驱动电路信息。
49.步骤s324、逻辑处理模块正常输出给激光器驱动信号,并依照从存储器中读取的y波导驱动信息驱动面向y波导的驱动电路。
50.步骤s325、逻辑处理模块通过调整光通过y波导的延时计算出当前的角速度值w2,并根据低功耗模式前的角速度为w1和当前的角速度值w2确定低功耗时间段内的角速度。
51.优选地,若在正常工作时间段内角速度变化有固定规律,如匀加角速度运动(包含匀角速度运动),所述步骤s235关于低功耗时间段内的角速度确定包括:若角加速度为a,进入低功耗模式前的角速度为w1,且经过低功耗时间t1之后依照公式可计算出w2’=w1+a*t1;将w2’与实际测试的角速度w2进行对比,若相等,则判断在t1时间段内陀螺仪所在系统依然保持匀加角速度运动;若不相等,计算比值k1=w2/w1,按照角加速度a计算的t1时间内的角速度乘以k1作为t1时间段内的角速度。
52.在步骤s325中,若在正常工作时间段内角速度变化没有固定规律或因电量低而强制进入间歇式工作模式时,取w1与w2的平均数作为t1时间内的角速度值。
53.实施例2
54.与上述实施例相对应的,本实施例公开一种光纤陀螺仪节能系统,包括存储器、处
理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
55.综上,本发明上述各实施例所分别公开的光纤陀螺仪节能方法及系统,能大幅降低系统功耗,延长设备使用时间;而且光纤陀螺仪在正常工作模式和低功耗模式之间切换时,可以避免ad转换模块在获得供电前,前端有电平导致的ad工作异常或损坏的情况。而且,在间歇式工作模式中,能精确地传承和确定相关的状态参数;有效避免了因节能而影响设备的整体性能。
56.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1