一种自动化通用计量系统和工作方法与流程
1.本发明属于片件测厚技术领域,具体涉及一种自动化通用计量系统和工作方法。
背景技术:
2.对于片状的零部件在检测是否合格时,其中对于板厚的检测尤其重要,现有技术中,片件(也叫片状零件,片状零部件)在检测板厚时,通常将其安装在检测台上检测,检测转台上设置有支撑架,片件通过支撑架固定在检测转台上。上述片件的定位只有支撑架一个主定位,在扫描时,对于片件上的通孔容易出现扫描不到或者变形扫描的情况,因此需要一个辅助定位组件,使其便于扫描片件上的通孔。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种自动化通用计量系统和工作方法。
4.为了实现本发明的上述目的,本发明提供了一种自动化通用计量系统,包括辅助定位组件和用于安装片件且为主要定位的支撑组件,所述辅助定位组件安装在片件上的通孔内,便于在旋转扫描时能准确识别片件上的通孔。
5.作为上述方案的优选,所述辅助定位组件包括若干个不同规格的辅助定位销,所述辅助定位销包括定位端和防脱端,所述定位端能穿过片件的通孔,所述防脱端的直径大于通孔的直径,防止辅助定位销整体穿过通孔,所述定位端的前端设置有便于定位端从上插入到通孔内的倒角。
6.进一步优选,所述定位端和防脱端为一体成型。
7.进一步优选,所述支撑组件包括用于片件转动的检测转台和用于片件安装定位的,所述支撑架安装在检测转台的上方,所述支撑架包括仿形块支座和若干块不同结构的仿形块,所述仿形支座的上端设置有至少两个用于安装仿形块的仿形安装孔。
8.进一步优选,所述检测转台包括转盘、旋转机构、底座和到位锁紧机构,所述旋转机构设置在转盘的下方,能使转盘转动,所述底座设置在转盘外,用于将转盘支撑在地面上,所述到位锁紧机构设置在底座上,用于检测转盘到位情况并将转盘锁紧防止转动。
9.进一步优选,所述旋转机构包括旋转轴、圆柱齿轮、齿条、固定轴座、伸缩缸和防脱组件,所述旋转轴安装在转盘上,所述圆柱齿轮、固定轴座和防脱组件从上到下依次套装在旋转轴上,所述固定轴座与旋转轴之间设置有轴承,所述伸缩缸通过伸缩缸固定板设置在固定轴座上,伸缩缸的伸缩控制端与转台控制器的伸缩控制端相连,所述伸缩缸的伸缩端通过连接板与齿条相连,在伸缩缸上设置有用于感应连接板的接近传感器,接近传感器的接近信号输出端与转台控制器的接近信号输入端相连,所述齿条与圆柱齿轮啮合,所述齿条上还设置有滑轨,所述滑轨滑动连接在至少两块固定导块上,所述固定导块上设置有固定在固定轴座上的导块固定板,当伸缩缸动作时,带动齿条移动,从而通过圆柱齿轮和旋转轴,带动转盘转动。
10.进一步优选,所述底座包括外固定架、支架和转盘支撑架,所述外固定架设置在转盘外,若干个转盘支撑架设置在转盘下方,所述支架包括外框架和设置在外框架上的内框架,所述外固定架设置在外框架的顶面,所述外框架的下端支撑在地面上,所述转盘支撑架设置在内框架上。
11.进一步优选,所述到位锁紧机构包括插销和锁块,所述插销安装在外固定架的底面,两个所述锁块安装在转盘底面,分别为第一锁块和第二锁块,且同轴线相隔180
°
安装,所述插销采用气缸驱动,气缸的控制端与转台控制器的气缸控制端相连;
12.在插销上设置有红外接收装置,红外接收装置的红外信号输出端与转台控制器的红外接收端相连,在第一锁块上设置有红外第一发送装置在第二锁块上设置有红外第二发送装置,红外第一发送装置和红外第二发送装置发送的红外与转盘平面平行,且背向转盘中心射出;红外第一发送装置发射的红外线强度高于红外第二发送装置发射的红外线。
13.本发明还公开了一种自动化通用计量系统工作方法,包括以下步骤:
14.s1,系统初始化;
15.s2,将仿形块支座固定安装在转盘上;
16.s3,将仿形块通过仿形安装孔固定安装在仿形块支座上;
17.s4,将仿形块相适应的待检测片件放置于仿形块上;
18.s5,将辅助定位销上的定位端插入待检测片件相适应的通孔内;
19.s6,对片件进行扫描,扫描完毕后,扫描下一待检测片件,执行步骤s3或s4。
20.在本发明的一种优选实施方式中,步骤s1包括以下步骤:
21.s11,转台控制器向气缸发送打开锁块控制命令,气缸控制其插销上的插销轴脱离锁块;
22.s12,插销上的插销轴脱离锁块后,转台控制器向伸缩缸发送伸缩杆缩回控制信号,伸缩缸带动齿条向左移动,从而通过圆柱齿轮和旋转轴,带动转盘逆时针转动;当接近传感器检测到连接板接近接近传感器时,伸缩缸停止工作;
23.s13,转台控制器向伸缩缸发送伸缩杆伸长控制信号,伸缩缸带动齿条向右移动,从而通过圆柱齿轮和旋转轴,带动转盘顺时针转动;当转台控制器依次接收到红外第一发送装置和红外第二发送装置发射的红外线后,执行步骤s24;
24.s14,转台控制器向伸缩缸发送伸缩杆缩回控制信号,伸缩缸带动齿条向左移动,从而通过圆柱齿轮和旋转轴,带动转盘逆时针转动;当转台控制器接收到红外第一发送装置的红外线,则伸缩缸停止工作;执行步骤s15;
25.s15,转台控制器向气缸发送锁住锁块控制命令,气缸控制其插销上的插销轴锁住锁块;
26.或/和步骤s6包括以下步骤:
27.s61,转台控制器向气缸发送打开锁块控制命令,气缸控制其插销上的插销轴脱离锁块;
28.s62,转台控制器向伸缩缸发送伸缩杆伸长控制信号,伸缩缸带动齿条向右移动,从而通过圆柱齿轮和旋转轴,带动转盘顺时针转动;当转台控制器依次接收到红外第二发送装置和红外第一发送装置发射的红外线后,则伸缩缸停止工作;
29.s63,扫描下一个片件时,转台控制器向伸缩缸发送伸缩杆缩回控制信号,伸缩缸
带动齿条向左移动,从而通过圆柱齿轮和旋转轴,带动转盘逆时针转动;当转台控制器依次接收到红外第二发送装置和红外第一发送装置发射的红外线后,执行步骤s64;
30.s64,扫描再下一个片件时,返回步骤s61;直至待检测片件扫描完毕,执行步骤s65;
31.s65,转台控制器向气缸发送锁住锁块控制命令,气缸控制其插销上的插销轴锁住锁块。
32.综上所述,由于采用了上述技术方案,本发明增加了辅助定位组件,在安装时,将其装到片件的通孔上,当片件在扫描时,能有效识别出通孔的位置和大小,从而使得扫描的精度更高。
33.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
34.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
35.图1为本发明中支撑组件的结构示意图。
36.图2为本发明中支撑架的结构示意图。
37.图3为本发明中旋转机构的结构示意。
38.图4为本发明中检测转台的结构示意图。
39.图5为本发明中锁紧机构的结构示意图。
40.图6为本发明中辅助定位销的结构示意图。
41.图7为本发明的接近传感器的电路连接示意图。
42.图8为本发明的红外第一发送装置或红外第二发送装置的电路连接示意图。
43.图9为本发明的红外接收装置电路连接示意图。
具体实施方式
44.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
45.本发明提供了一种自动化通用计量系统,如图1~6所示,主要由辅助定位组件和用于安装片件且为主要定位的支撑组件组成。其中辅助定位组件安装在片件上的通孔内,便于在旋转扫描时能准确识别片件上的通孔。
46.辅助定位组件包括若干个不同规格的辅助定位销1,辅助定位销1包括定位端1a和防脱端1b,定位端1a能穿过片件的通孔,防脱端1b的直径大于通孔的直径,防止辅助定位销1整体穿过通孔,定位端1a的前端设置有便于定位端1a从上插入到通孔内的倒角。
47.为方便加工制造,辅助定位销1的定位端1a和防脱端1b采用一体成型。
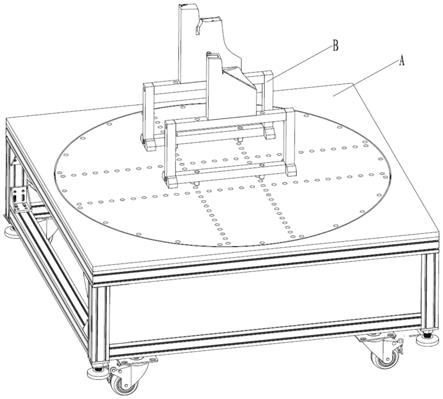
48.支撑组件的具体结构包括用于片件转动的检测转台a和用于片件安装定位的支撑架b,其中支撑架b安装在检测转台a的上方,支撑架b包括仿形块支座2和若干块不同结构的仿形块21,仿形支座2的上端设置有至少两个用于安装仿形块21的仿形安装孔2a。至少两个
仿形安装孔2a的设置,有利于不同仿形块21的安装,片件安装在仿形块21上,并通过仿形块21的自身结构实现定位,而检测转台a用于保证扫描时片件的转动,仿形块支座2便于不同的仿形块能够安装在检测转台a。
49.检测转台a具体包括转盘3、旋转机构、底座和到位锁紧机构,旋转机构设置在转盘3的下方,能使转盘3转动,底座设置在转盘3外,用于将转盘3支撑在地面上,到位锁紧机构设置在底座上,用于检测转盘3到位情况并将转盘3锁紧防止转动。与传统的检测转台相比,多设置有到位锁紧机构,使得检测转台a的到位准确,不易出现重复扫描的情况。
50.旋转机构具体包括旋转轴4、圆柱齿轮5、齿条6、固定轴座7、伸缩缸8和防脱组件9,旋转轴4安装在转盘3上,圆柱齿轮5、固定轴座7和防脱组件9从上到下依次套装在旋转轴4上,固定轴座7与旋转轴4之间设置有轴承,伸缩缸8通过伸缩缸固定板10设置在固定轴座7上,伸缩缸8的伸缩控制端与转台控制器的伸缩控制端相连,伸缩缸8的伸缩端通过连接板11与齿条6相连,在伸缩缸8上设置有用于感应连接板11的接近传感器,接近传感器的接近信号输出端与转台控制器的接近信号输入端相连,齿条6与圆柱齿轮5啮合,齿条6上还设置有滑轨12,滑轨12滑动连接在至少两块固定导块13上,固定导块13上设置有固定在固定轴座7上的导块固定板14。
51.当伸缩缸8动作时,能带动齿条6移动,由于齿条6与圆柱齿轮5啮合,当齿条6移动时,带动圆柱齿轮5转动,又由于圆柱齿轮5通过花键或平键与旋转轴4连接,当圆柱齿轮5转动时,带动旋转轴4转动,又由于旋转轴4的上端设置法兰盘,法兰盘与转盘3通过螺栓连接在一起,使得旋转轴2转动时带动转盘3转动。通过齿轮齿条的方式带动转盘3进行转动,使得转盘3的转动精度更高。
52.底座的具体结构包括外固定架15、支架和转盘支撑架16,外固定架15设置在转盘3外,若干个转盘支撑架16设置在转盘3下方,支架包括外框架17和设置在外框架17上的内框架18,外固定架15设置在外框架17的顶面,外框架17的下端支撑在地面上,转盘支撑架16设置在内框架18上。
53.到位锁紧机构的具体结构包括插销19和锁块20,插销19安装在外固定架15的底面,两个锁块20安装在转盘3底面,分别为第一锁块和第二锁块,且同轴线相隔180
°
安装,插销19采用气缸驱动,气缸的控制端与转台控制器的气缸控制端相连;
54.在插销19上设置有红外接收装置,红外接收装置的红外信号输出端与转台控制器的红外接收端相连,在第一锁块上设置有红外第一发送装置,在第二锁块上设置有红外第二发送装置,红外第一发送装置和红外第二发送装置发送的红外与转盘3平面平行,且背向转盘3中心射出;红外第一发送装置发射的红外线强度高于红外第二发送装置发射的红外线。其中,红外第一发送装置或红外第二发送装置包括:如图8所示,译码芯片u11的滤波输出端outfilt与电容c33的第一端相连,译码芯片u11的环路滤波输出端loopfilt与电容c22的第一端相连,电容c33的第二端、电容c22的第二端和译码芯片u11的接地端gnd与电源地相连;译码芯片u11的电源输入端vcc与电源vcc1相连,译码芯片u11的振荡电容端timcap分别与电阻r111的第一端和电容c11的第一端相连,电容c11的第二端与电源地相连,译码芯片u11的振荡电阻端timres分别与电阻r111的第二端和电阻r55的第一端相连,电阻r55的第二端与三极管q11的基极相连,三极管q11的发射极与电源地相连,三极管q11的集电极与红外发射管d11的第一端相连,红外发射管d11的第二端与电阻r44的第一端相连,电阻r44
的第二端与电源vcc1相连。电容c33的容值为1uf,电容c22的容值为0.47uf,电容c11为104电容,电阻r55、电阻r111的阻值为10k,电阻r44的阻值为120ω,译码芯片u11的型号为lm567。
55.红外接收装置包括:如图9所示,译码芯片u111的信号输入端in与电容c41的第一端相连,电容c41的第二端分别与电阻r21的第一端和红外接收管d31的第一端相连,电阻r21的第二端与电源地相连,红外接收管d31的第二端与电源vcc相连;译码芯片u111的滤波输出端outfilt与电容c31的第一端相连,译码芯片u111的环路滤波输出端loopfilt与电容c21的第一端相连,电容c31的第二端、电容c21的第二端和译码芯片u111的接地端gnd与电源地相连;译码芯片u111的电源端vcc与电源vcc相连,译码芯片u111的信号输出端out分别与指示二极管led11的第一端、电阻r31的第一端和接口p1的信号输入端相连,指示二极管led11的第二端与电阻r61的第一端相连,电阻r61的第二端、电阻r31的第二端和电容c51的第一端分别与接口p1的电源输出端相连,接口p1的电源输出端输出电源vcc,电容c51的第二端与接口p1的电源地相连,通过接口p1与电源和转台控制器的红外接收端相连。电容c41、电容c51为104电容,电阻r21的阻值为22k,电容c31的容值为1uf,电容c21的容值为0.47uf,电阻r61的阻值为5.1k,电阻r31的阻值为10k,译码芯片u11的型号为lm567。
56.在本发明的一种优选实施方式中,外框架17包括呈矩形的上支撑架,所述上支撑架的转角处向下纵向设置有立柱,四根所述立柱下端之间横向设置有第一连接柱,所述立柱的底面安装有支撑在地面上的可升降的支撑垫组件;所述内框架包括支柱和第二连接柱,两根所述支柱左右间隔设置在上支撑架的下方,两根所述第二连接柱前后间隔设置在两根支柱内,每个支柱和第二连接柱上至少设置有两个转盘支撑架。在本实施方式中,所述支撑垫组件包括脚垫和安装垫,所述安装垫设置在立柱的底面,所述安装垫下设置有螺母,所述脚垫上设置有调节螺杆,所述调节螺杆向上穿过安装垫后伸入到立柱内,在立柱内设置有驱动调节螺杆实现上下升降的驱动电机,驱动电机的正反转驱动控制端与转台控制器的正反转驱动控制端相连,在四根立柱中的四个驱动电机,分别为第一升降驱动电机、第二升降驱动电机、第三升降驱动电机和第四升降驱动电机,第一升降驱动电机的正反转驱动控制端与转台控制器的正反转驱动第一控制端相连,第一升降驱动电机的正反转驱动控制端与转台控制器的正反转驱动第一控制端相连,第二升降驱动电机的正反转驱动控制端与转台控制器的正反转驱动第二控制端相连,第三升降驱动电机的正反转驱动控制端与转台控制器的正反转驱动第三控制端相连;以及在立柱内设置有用于判断立柱是否倾斜抬起的倾斜传感器,倾斜传感器的倾斜信号输出端与转台控制器的倾斜信号输入端相连,其设置在四根立柱内的四个倾斜传感器,分别为第一倾斜传感器、第二倾斜传感器、第三倾斜传感器和第四倾斜传感器,第一倾斜传感器的倾斜信号输出端与转台控制器的第一倾斜信号输入端相连,第二倾斜传感器的倾斜信号输出端与转台控制器的第二倾斜信号输入端相连,第三倾斜传感器的倾斜信号输出端与转台控制器的第三倾斜信号输入端相连,第四倾斜传感器的倾斜信号输出端与转台控制器的第四倾斜信号输入端相连,当转台控制器接收到升高转台高度信号,且转台控制器接收到第一倾斜传感器监测到的倾斜度大于或者等于预设第一倾斜度,则转台控制器向第一升降驱动电机发送正转驱动信号,使其第一升降驱动电机对应的调节螺杆伸出立柱;当转台控制器接收到升高转台高度信号,且转台控制器接收到第二倾斜传感器监测到的倾斜度大于或者等于预设第二倾斜度,则转台控制器向第二升
降驱动电机发送正转驱动信号,使其第二升降驱动电机对应的调节螺杆伸出立柱;当转台控制器接收到升高转台高度信号,且转台控制器接收到第三倾斜传感器监测到的倾斜度大于或者等于预设第三倾斜度,则转台控制器向第三升降驱动电机发送正转驱动信号,使其第三升降驱动电机对应的调节螺杆伸出立柱;当转台控制器接收到升高转台高度信号,且转台控制器接收到第四倾斜传感器监测到的倾斜度大于或者等于预设第四倾斜度,则转台控制器向第四升降驱动电机发送正转驱动信号,使其第四升降驱动电机对应的调节螺杆伸出立柱;
57.当转台控制器接收到降低转台高度信号,且转台控制器接收到第一倾斜传感器监测到的倾斜度大于或者等于预设第一倾斜度,则转台控制器向第一升降驱动电机发送反转驱动信号,使其第一升降驱动电机对应的调节螺杆缩回立柱;当转台控制器接收到降低转台高度信号,且转台控制器接收到第二倾斜传感器监测到的倾斜度大于或者等于预设第二倾斜度,则转台控制器向第二升降驱动电机发送反转驱动信号,使其第二升降驱动电机对应的调节螺杆缩回立柱;当转台控制器接收到降低转台高度信号,且转台控制器接收到第三倾斜传感器监测到的倾斜度大于或者等于预设第三倾斜度,则转台控制器向第三升降驱动电机发送反转驱动信号,使其第三升降驱动电机对应的调节螺杆缩回立柱;当转台控制器接收到降低转台高度信号,且转台控制器接收到第四倾斜传感器监测到的倾斜度大于或者等于预设第四倾斜度,则转台控制器向第四升降驱动电机发送反转驱动信号,使其第四升降驱动电机对应的调节螺杆缩回立柱。其中,在前后两根所述第一连接柱左右间隔设置有能急停的移动轮,所述调节螺杆的长度大于移动轮的高度。
58.在本发明的一种优选实施方式中,所述接近传感器包括感应探头t1,还包括振荡触发模块、稳态触发模块、放大触发模块、稳压触发模块和开关量触发模块;
59.所述感应探头t1的输出端与振荡触发模块的输入端相连,振荡触发模块的输出端与稳态触发模块的输入端相连,稳态触发模块的输出端与放大触发模块的输入端相连,放大触发模块的输出端与稳压触发模块的输入端相连,稳压触发模块的输出端与开关量触发模块的输入端相连;开关量触发模块的输出端与转台控制器的接近信号输入端相连。
60.在本发明的一种优选实施方式中,振荡触发模块包括电感l1、电容c2、电容c3、三极管q7、三极管q8、电阻r13、电阻r14、电阻r15和电阻r16;
61.感应探头t1的输出端与三极管q8的集电极相连,三极管q8的发射极分别与电容c3的第一端和电感l1的第一端相连,电容c3的第二端和电感l1的第二端分别与电源地相连,电阻r16的第一端分别与三极管q7的基极和三极管q8的基极相连,三极管q7的发射极与电阻r14的第一端相连,电阻r14的第二端与电阻r15的第一端相连,电阻r15的第二端与电感l1的调节端相连,三极管q7的集电极分别与电阻r13的第一端、电容c2的第一端和稳态触发模块的输入端相连,电容c2的第二端与电源地相连,电阻r13的第一端和电阻r16的第一端分别与稳压触发模块电源输出端相连。
62.在本发明的一种优选实施方式中,稳态触发模块包括电容c1、电阻r7、电阻r8、电阻r9、电阻r10、电阻r11、电阻r12、三极管q5和三极管q6;
63.振荡触发模块的输出端与电阻r12的第一端相连,电阻r12的第二端与三极管q6的基极相连,三极管q6的发射极分别与电阻r9的第一端和三极管q5的发射极相连,电阻r9的第二端与电源地相连,三极管q6的集电极分别与电阻r10的第一端和电阻r11的第一端相
连,电阻r10的第二端与三极管q5的基极相连,三极管q5的集电极与电阻r8的第一端相连,电阻r8的第二端分别与电阻r7的第一端和放大触发模块的输入端相连,电阻r7的第二端和电阻r11的第二端分别与稳压触发模块电源输出端相连。
64.在本发明的一种优选实施方式中,稳压触发模块包括二极管d2、三极管q2、三极管q3、三极管q4、电阻r3、电阻r4、电阻r5、电阻r6、电阻r17;
65.放大触发模块的输出端与三极管q4的基极相连,三极管q4的发射极与电阻r5的第一端相连,电阻r5的第二端分别与电阻r6的第一端和三极管q3的基极相连,电阻r6的第二端与电源地相连,三极管q3的发射极与电源地相连,三极管q3的集电极与电阻r4的第一端相连,电阻r4的第二端与开关量触发模块的输入端相连,三极管q4的集电极与电阻r17的第一端相连,电阻r17的第一端为稳压触发模块电源输出端,电阻r7的第二端与三极管q2的发射极相连,三极管q2的基极分别与电阻r3的第一端和二极管d2的负极相连,二极管d2的正极与电源地相连;三极管q2的集电极和电阻r3的第二端分别与电源vcc相连。
66.在本发明的一种优选实施方式中,开关量触发模块包括三极管q1、电阻r1、电阻r2、二极管d3、二极管d4和指示二极管led1;
67.稳压触发模块的输出端分别与三极管q1的基极和电阻r2的第一端相连,三极管q1的发射极和电阻r2的第二端与电源vcc相连,三极管q1的集电极分别与电阻r1的第一端和二极管d3的负极相连,三极管q1的集电极与转台控制器的接近信号输入端相连,电阻r1的第二端与指示二极管led1的第一端相连,二极管d3的正极和指示二极管led1的第二端分别与电源地相连。
68.在本发明的一种优选实施方式中,还包括二极管d1,二极管d1的正极与三极管q1的集电极相连,二极管d1的负极与三极管q5的发射极相连。
69.在本发明的一种优选实施方式中,还包括电容c1,电容c1的第一端与稳压触发模块电源输出端相连,电容c1的第二端与电源地相连。
70.如图7所示,感应探头t1的输出端与三极管q8的集电极相连,三极管q8的发射极分别与电容c3的第一端和电感l1的第一端相连,电容c3的第二端和电感l1的第二端分别与电源地相连,电阻r16的第一端分别与三极管q7的基极和三极管q8的基极相连,三极管q7的发射极与电阻r14的第一端相连,电阻r14的第二端与电阻r15的第一端相连,电阻r15的第二端与电感l1的调节端相连,三极管q7的集电极分别与电阻r13的第一端、电容c2的第一端和电阻r12的第一端相连,电容c2的第二端与电源地相连,电阻r13的第一端、电阻r16的第一端和电容c1的第一端分别与电阻r17的第一端相连;电容c1的第二端与电源地相连;
71.电阻r12的第二端与三极管q6的基极相连,三极管q6的发射极分别与电阻r9的第一端和三极管q5的发射极相连,电阻r9的第二端与电源地相连,三极管q6的集电极分别与电阻r10的第一端和电阻r11的第一端相连,电阻r10的第二端与三极管q5的基极相连,三极管q5的集电极与电阻r8的第一端相连,电阻r8的第二端分别与电阻r7的第一端和三极管q4的基极相连,电阻r7的第二端和电阻r11的第二端分别与电阻r17的第一端相连;
72.三极管q4的发射极与电阻r5的第一端相连,电阻r5的第二端分别与电阻r6的第一端和三极管q3的基极相连,电阻r6的第二端与电源地相连,三极管q3的发射极与电源地相连,三极管q3的集电极与电阻r4的第一端相连,三极管q4的集电极分别与电阻r17的第一端和二极管d1的负极相连,电阻r7的第二端与三极管q2的发射极相连,三极管q2的基极分别
与电阻r3的第一端和二极管d2的负极相连,二极管d2的正极与电源地相连;三极管q2的集电极和电阻r3的第二端分别与电源vcc相连;
73.三极管q1的基极和电阻r2的第一端分别与电阻r4的第二端相连,三极管q1的发射极和电阻r2的第二端与电源vcc相连,三极管q1的集电极分别与电阻r1的第一端、二极管d3的负极和二极管d1的正极相连,三极管q1的集电极与转台控制器的接近信号输入端相连,电阻r1的第二端与指示二极管led1的第一端相连,二极管d3的正极和指示二极管led1的第二端分别与电源地相连。
74.本发明还公开了一种自动化通用计量系统工作方法,包括以下步骤:
75.s1,系统初始化;在系统初始化前还包括以下步骤:
76.s01,向转台控制器发送升高转台高度触发信号;包括s011~s014排列顺序;其排列顺序有a
44
=4
×3×2×
1=24种,其顺序可以为s011,s012,s013,s014;s011,s012,s014,s013;s012,s011,s013,s014;s011,s013,s014,s012;s011,s014,s012,s013;在此不再列举剩余19种。下面给出顺序为s011,s012,s013,s014的步骤:
77.s011,此时转台控制器接收到升高转台高度信号,将第一倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第一倾斜传感器监测到的倾斜度大于或者等于预设第一倾斜度,则转台控制器向第一升降驱动电机发送正转驱动信号,使其第一升降驱动电机对应的调节螺杆伸出立柱;当其调节螺杆伸出立柱长度等于转台预设升高高度,则第一升降驱动电机停止工作;
78.s012,此时转台控制器接收到升高转台高度信号,将第二倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第二倾斜传感器监测到的倾斜度大于或者等于预设第二倾斜度,则转台控制器向第二升降驱动电机发送正转驱动信号,使其第二升降驱动电机对应的调节螺杆伸出立柱;当其调节螺杆伸出立柱长度等于转台预设升高高度,则第二升降驱动电机停止工作;
79.s013,此时转台控制器接收到升高转台高度信号,将第三倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第三倾斜传感器监测到的倾斜度大于或者等于预设第三倾斜度,则转台控制器向第三升降驱动电机发送正转驱动信号,使其第三升降驱动电机对应的调节螺杆伸出立柱;当其调节螺杆伸出立柱长度等于转台预设升高高度,则第三升降驱动电机停止工作;
80.s014,此时转台控制器接收到升高转台高度信号,将第四倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第四倾斜传感器监测到的倾斜度大于或者等于预设第四倾斜度,则转台控制器向第四升降驱动电机发送正转驱动信号,使其第四升降驱动电机对应的调节螺杆伸出立柱;当其调节螺杆伸出立柱长度等于转台预设升高高度,则第四升降驱动电机停止工作;
81.最终使得调节螺杆伸出立柱长度高于移动轮的高度。
82.在推动转移转台前,包括以下步骤:
83.s02,向转台控制器发送降低转台高度触发信号;包括s021~s024排列顺序;其排列顺序有a
44
=4
×3×2×
1=24种,其顺序可以为s021,s022,s023,s024;s021,s023,s022,s024;s021,s024,s023,s022;s022,s024,s021,s023;在此不再列举剩余20种。下面给出顺序为s021,s022,s023,s024的步骤:
84.s021,此时转台控制器接收到降低转台高度信号,将第一倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第一倾斜传感器监测到的倾斜度大于或者等于预设第一倾斜度,则转台控制器向第一升降驱动电机发送反转驱动信号,使其第一升降驱动电机对应的调节螺杆缩回立柱;当其第一升降驱动电机反转圈数等于步骤s011中第一升降驱动电机正转圈数,则第一升降驱动电机停止工作;
85.s022,此时转台控制器接收到降低转台高度信号,将第二倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第二倾斜传感器监测到的倾斜度大于或者等于预设第二倾斜度,则转台控制器向第二升降驱动电机发送反转驱动信号,使其第二升降驱动电机对应的调节螺杆缩回立柱;当其第二升降驱动电机反转圈数等于步骤s012中第二升降驱动电机正转圈数,则第二升降驱动电机停止工作;
86.s023,此时转台控制器接收到降低转台高度信号,将第三倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第三倾斜传感器监测到的倾斜度大于或者等于预设第三倾斜度,则转台控制器向第三升降驱动电机发送反转驱动信号,使其第三升降驱动电机对应的调节螺杆缩回立柱;当其第三升降驱动电机反转圈数等于步骤s013中第三升降驱动电机正转圈数,则第三升降驱动电机停止工作;
87.s024,此时转台控制器接收到升高转台高度信号,将第四倾斜传感器所对应的立柱倾斜抬高,当转台控制器接收到第四倾斜传感器监测到的倾斜度大于或者等于预设第四倾斜度,则转台控制器向第四升降驱动电机发送反转驱动信号,使其第四升降驱动电机对应的调节螺杆缩回立柱;当其第四升降驱动电机反转圈数等于步骤s014中第四升降驱动电机正转圈数,则第四升降驱动电机停止工作。
88.s2,将支撑架b上的仿形块支座2固定安装在转盘3上;
89.s3,将仿形块21通过仿形安装孔2a固定安装在仿形块支座2上;
90.s4,将仿形块21相适应的待检测片件放置于仿形块21上;
91.s5,将辅助定位销1上的定位端1a插入待检测片件相适应的通孔内;
92.s6,对片件进行扫描,扫描完毕后,扫描下一待检测片件,执行步骤s3或s4。
93.在本发明的一种优选实施方式中,步骤s1包括以下步骤:
94.s11,转台控制器向气缸发送打开锁块控制命令,气缸控制其插销19上的插销轴脱离锁块20;
95.s12,插销19上的插销轴脱离锁块20后,转台控制器向伸缩缸8发送伸缩杆缩回控制信号,伸缩缸8带动齿条6向左移动,从而通过圆柱齿轮5和旋转轴4,带动转盘3逆时针转动;当接近传感器检测到连接板11接近接近传感器时,伸缩缸8停止工作;
96.s13,转台控制器向伸缩缸8发送伸缩杆伸长控制信号,伸缩缸8带动齿条6向右移动,从而通过圆柱齿轮5和旋转轴4,带动转盘3顺时针转动;当转台控制器依次接收到红外第一发送装置和红外第二发送装置发射的红外线后,执行步骤s24;
97.s14,转台控制器向伸缩缸8发送伸缩杆缩回控制信号,伸缩缸8带动齿条6向左移动,从而通过圆柱齿轮5和旋转轴4,带动转盘3逆时针转动;当转台控制器接收到红外第一发送装置的红外线,则伸缩缸8停止工作;执行步骤s15;
98.s15,转台控制器向气缸发送锁住锁块控制命令,气缸控制其插销19上的插销轴锁住锁块20;
99.或/和步骤s6包括以下步骤:
100.s61,转台控制器向气缸发送打开锁块控制命令,气缸控制其插销19上的插销轴脱离锁块20;
101.s62,转台控制器向伸缩缸8发送伸缩杆伸长控制信号,伸缩缸8带动齿条6向右移动,从而通过圆柱齿轮5和旋转轴4,带动转盘3顺时针转动;当转台控制器依次接收到红外第二发送装置和红外第一发送装置发射的红外线后,则伸缩缸8停止工作;
102.s63,扫描下一个片件时,转台控制器向伸缩缸8发送伸缩杆缩回控制信号,伸缩缸8带动齿条6向左移动,从而通过圆柱齿轮5和旋转轴4,带动转盘3逆时针转动;当转台控制器依次接收到红外第二发送装置和红外第一发送装置发射的红外线后,执行步骤s64;
103.s64,扫描再下一个片件时,返回步骤s61;直至待检测片件扫描完毕,执行步骤s65;
104.s65,转台控制器向气缸发送锁住锁块控制命令,气缸控制其插销19上的插销轴锁住锁块20。
105.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1