基于三维探地雷达的雷达数据标准处理方法与流程
1.本发明涉及雷达数据处理技术领域,尤其是基于三维探地雷达的雷达数据标准处理方法。
背景技术:
2.探地雷达(ground penetrating radar)是利用雷达电磁波探测地下目标,通过分析目标信号的特征来提取目标的性质、形状等信息。现有的技术中,可实现地下目标探测的技术有很多,例如核、重力场、电磁感应和超声波等等方式。但是,探地雷达(gpr)在应用时有明显的优越性,相比于其他技术,它的优越性具体表现在探测费用低、探测速度快、探测过程连续、探测目标范围广(可以探测非金属和金属)、分辨率高、操作方便灵活等优点。近年来,探地雷达一直是国际学术讨论的热点之一。它在国防、公路、城市建设、公安、铁路、运输、矿山、机场、考古、隧道、水利等诸多领域得到了很大的关注,在各个领域,探地雷达都表现出了十分广阔的应用前景。目前使用较多、效果更好的是三维探地雷达。
3.然而,探地雷达在工作时,其工作环境复杂多变,导致接收机接收到的回波信号包含各种各样的杂波,使得辨认目标回波十分困难,这就需要抑制杂波和噪声,以提取所需的目标回波信号。同时,由于雷达电磁波的传播随着距离的变化会导致信号产生衰减,因此还需要利用特定的函数进行增强,因此,信号处理是探地雷达正常工作的前提。目前,现有技术中的方法大多没有一个统一的标准流程来进行探地雷达处理,无法保证最终处理效果的一致性与准确性、高效性。
4.因此,急需要提出一种逻辑简单、准确可靠的基于三维探地雷达的雷达数据标准处理方法。
技术实现要素:
5.针对上述问题,本发明的目的在于提供基于三维探地雷达的雷达数据标准处理方法,本发明采用的技术方案如下:
6.基于三维探地雷达的雷达数据标准处理方法,包括以下步骤:
7.采集三维探地雷达信号,并采用极值法去除地面波;
8.对探地雷达信号中任一雷达电磁波的任一采样点去除采样均值,以剔除杂波与噪声,其表达式为:
[0009][0010]
其中,a
m
′
表示整体探地雷达信号去除噪声后探地雷达中一个雷达电磁波的第m个采样点的雷达信号,a
m
表示原始探地雷达中一个雷达电磁波的第m个采样点的雷达信号,n表示探地雷达中采集到的雷达返回雷达电磁波数量;
[0011]
将数个雷达电磁波的波形进行叠加,并求得固定范围中心点的雷达振幅值,并去
除背景噪声,其表达式为:
[0012][0013]
其中,a
c
表示固定范围中心点的雷达振幅值,a
ij
表示叠加后的雷达电磁波的固定范围坐标(i,j)的雷达振幅值;m表示固定范围大小,其取值范围为大于10、且小于50的整数;
[0014]
根据三维探地雷达的固定频率f,采用带通滤波器进行滤波;
[0015]
利用增强函数对滤波的雷达电磁波进行增强处理,其表达式为:
[0016][0017]
其中,a
i
′
表示采用增强函数后还原的探地雷达电磁波第i个采样点真实幅值,a
i
表示探地雷达电磁波第i个采样点原始幅值,r表示一个电磁波的采样点总数量,ρ为增强系数;
[0018]
将增强后的雷达电磁波的数据转换成彩色图像,其映射表达式如下:
[0019][0020][0021][0022][0023]
其中,a表示原始雷达数据;b、g、r分别表示构成彩色图bgr三个通道的像素值。
[0024]
进一步地,所述带通滤波器的频带为
[0025]
优选地,所述固定范围取值为17。
[0026]
优选地,所述增强系数取值为
[0027]
与现有技术相比,本发明具有以下有益效果:
[0028]
(1)本发明巧妙地采用极值法去除地面波,以保证不同位置数据的对应;另外,本发明采用采样点去除采样均值方式,降低了整体固有属性上的加性噪声,提高了信噪比;
[0029]
(2)本发明采用对雷达波形进行叠加,并通过一个固定范围去匹配雷达波形图,将范围内的中心点振幅值取为范围内雷达采样点振幅值的均值,其有效的去除局部背景噪声;
[0030]
(3)本发明巧妙地采用了带通滤波器进行滤波,以实现频域干扰去除;
[0031]
(4)本发明根据电磁波的衰减规律,并结合深度的不同还原电磁波应有的振幅,统一不同深度的采样样点数据,以保证数据增强显示可靠;
[0032]
(5)本发明将雷达数据转化为彩色图像,便于用户直接的肉眼观察与分析;
[0033]
综上所述,本发明具有逻辑简单、数据可靠、直观便于分析等优点,在雷达数据处理技术领域具有很高的实用价值和推广价值。
附图说明
[0034]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需使用的附图作简单介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对保护范围的限定,对于本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0035]
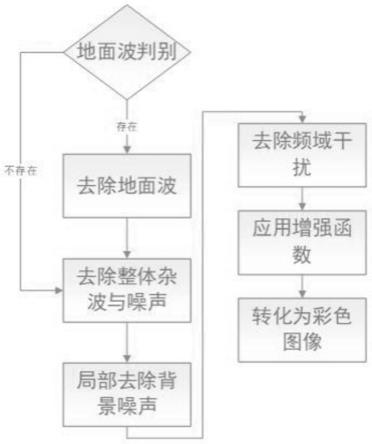
图1为本发明的逻辑流程图。
[0036]
图2为本发明的某一案例的雷达原始图像。
[0037]
图3为本发明的去除地面波结果。
[0038]
图4为本发明的去除整体和局部杂波与噪声结果。
[0039]
图5为本发明的去除频域干扰结果。
[0040]
图6为本发明的应用增强函数结果。
[0041]
图7为本发明的转化为彩色图像结果。
具体实施方式
[0042]
为使本申请的目的、技术方案和优点更为清楚,下面结合附图和实施例对本发明作进一步说明,本发明的实施方式包括但不限于下列实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
[0043]
实施例
[0044]
如图1至图7所示,本实施例提供了一种基于三维探地雷达的雷达数据标准处理方法,包括以下步骤:
[0045]
第一步,采集三维探地雷达信号,并采用极值法去除地面波;在本实施例中,将传播在空气中的电磁波采样点筛选出,去除一部分地面波。在此通过设定一个阈值,若存在比阈值更大的一个极值点,则认为是存在地面波的数据,将此极值点采样号之上的数据去除;若不存在比阈值更大的极值点,则认为数据已经不存在地面波,不做其他处理。基于常见的三维探地雷达,这个阈值通常为6000。
[0046]
第二步,对探地雷达信号中任一雷达电磁波的任一采样点去除采样均值,以剔除杂波与噪声,其表达式为:
[0047][0048]
其中,a
m
′
表示整体探地雷达信号去除噪声后探地雷达中一个雷达电磁波的第m个采样点的雷达信号,a
m
表示原始探地雷达中一个雷达电磁波的第m个采样点的雷达信号,n表示探地雷达中采集到的雷达返回雷达电磁波数量。
[0049]
第三步,将数个雷达电磁波的波形进行叠加,并求得固定范围中心点的雷达振幅值,并去除背景噪声,其表达式为:
[0050][0051]
其中,a
c
表示固定范围中心点的雷达振幅值,a
ij
表示叠加后的雷达电磁波的固定范围坐标(i,j)的雷达振幅值;m表示固定范围大小,其取值为17。
[0052]
第四步,根据三维探地雷达的固定频率f,采用带通滤波器进行滤波;在本实施例中,可以使用fir或iir进行滤波,fir的优势是可以保留更多的有效信息,但计算量偏大;iir更容易实现但干扰去除能力不如fir。另外,本实施例的带通滤波器的频带为
[0053]
第五步,利用增强函数对滤波的雷达电磁波进行增强处理,其表达式为:
[0054][0055]
其中,a
i
′
表示采用增强函数后还原的探地雷达电磁波第i个采样点真实幅值,a
i
表示探地雷达电磁波第i个采样点原始幅值,r表示一个电磁波的采样点总数量,ρ为增强系数,增强系数取值为
[0056]
第六步,将增强后的雷达电磁波的数据转换成彩色图像(实际情况下,图7为彩色图,本技术是转为灰度图像),其映射表达式如下:
[0057][0058][0059]
[0060][0061]
其中,a表示原始雷达数据;b、g、r分别表示构成彩色图bgr三个通道的像素值。
[0062]
上述实施例仅为本发明的优选实施例,并非对本发明保护范围的限制,但凡采用本发明的设计原理,以及在此基础上进行非创造性劳动而作出的变化,均应属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1