基于组合条纹的梁结构模态振型测量装置及方法
1.本发明属于视觉振动测量技术领域,具体涉及一种基于组合条纹的梁结构模态振型测量装置及方法。
背景技术:
2.目前,模态分析可分为计算模态分析和试验模态分析。由有限元计算为主要方法的计算模态已经发展的比较完善,已经在机器、建筑物、航天航空飞行器、船舶、汽车等领域得到广泛应用。但是试验模态分析由于受到测量系统和处理系统的限制,并没能高速发展。近十多年来,由于计算机技术、fft分析仪、高速数据采集系统以及振动传感器、激励器等技术的发展,试验模态分析也得到了的发展,受到了机械、电力、建筑、水利、航空、航天等许多产业部门的高度重视。就目前的试验模态分析来讲,可以较好的测量结构的特定的固有频率、阻尼比,而对模态振型却没有十分有效的测量手段。大多数的测量方法是在待测结构表面安装多个位移传感器,通过每个位移传感器得到的振动信息,进而得出模态振型。但是这样的方法往往会给待测结构引入额外附加质量,影响结构本身的固有振动特性。又或者采用光学测振系统,通过全场扫描得到待测结构的模态振型。但是这种全场扫描性激光测振仪价格昂贵,对环境要求苛刻,不适合应用在实际的工程项目当中。
技术实现要素:
3.本发明的目的在于提供一种基于组合条纹的梁结构模态振型测量装置及方法,该装置及方法有利于提高梁结构振动信息测量的精度和效率,且结构简单,实现成本低。
4.为实现上述目的,本发明采用的技术方案是:一种基于组合条纹的梁结构模态振型测量装置,其特征在于,包括待测梁结构、视觉传感器、光学镜头、可调支架和具有图像处理模块的计算机,所述待测梁结构表面附有组合条纹图案,所述视觉传感器安装于可调支架上,以对待测梁结构表面的组合条纹图案进行实时成像,所述光学镜头安装于视觉传感器前端,以通过调节光学镜头得到结构表面清晰的组合条纹图像,所述视觉传感器通过数据连接线与计算机连接,以上传采集到的图像信息,所述计算机通过图像处理模块对采集到的图像信息进行处理分析,进而计算得到待测梁结构的振动信息。
5.进一步地,所述组合条纹图案的外形为长方形,整个图案打印在纸张上得到具有组合条纹图案的图片,再将图片贴附于待测梁结构表面,或者整个图案不打印在纸张上而直接喷涂在待测梁结构表面,作为振动传感器。
6.进一步地,所述组合条纹图案由两种不同方向的单密度正弦条纹组成,包括设于中部沿宽度方向分布的测量条纹以及设于其两侧沿长度方向的定位条纹,两种条纹的分布方向呈90
°
角。
7.进一步地,所述定位条纹为周期为a的单密度正弦条纹,所述测量条纹为周期为b的单密度正弦条纹。
8.本发明还提供了一种基于组合条纹的梁结构模态振型测量方法,包括以下步骤:
步骤s1:根据待测梁结构的尺寸设计组合条纹图案的大小,将组合条纹图案贴附或喷涂在待测梁结构表面;步骤s2:将视觉传感器安装于可调支架上,调整好组合条纹的成像位置,并调整光学镜头,使组合条纹图案清晰地呈现在视觉传感器的中心;步骤s3:当待测梁结构受到激励发生振动时,视觉传感器实时采集待测梁结构振动时的组合条纹图像,并上传到计算机;步骤s4:计算机通过图像处理模块对采集到的组合条纹图像进行处理分析,通过定位与测量相结合的方法,计算得到待测梁结构的多点振动信息,进而得到共振频率和模态振型。
9.进一步地,所述步骤s4中,对组合条纹图像进行处理分析的具体步骤为:步骤s41:对每帧组合条纹图像两侧的定位条纹进行插值重采样以提高定位精度,然后进行快速傅里叶变换,得到定位条纹的频谱,提取频谱中最大组成部分的频率,滤去部分噪声频谱;步骤s42:对步骤s41得到的频谱进行逆傅里叶变换得到清晰的定位条纹的包裹相位信息,对包裹相位信息进行相位解调以得到未包裹的相位信息;将定位条纹的相位信息与图像的像素点一一对应,实现每帧条纹的定位;步骤s43:在每帧组合条纹图像中提取一数值相位点处的测量条纹,处理得到各帧测量条纹在该相位点处的条纹密度,并将第一帧的测量条纹作为参考,通过与参考帧的条纹密度进行对比分析,进而得到待测梁结构上该点垂直于成像平面方向的振动信息;步骤s44:通过对不同数值相位点的测量条纹进行处理,得到待测梁结构的多点振动信息,进而得到共振频率和模态振型。
10.进一步地,所述步骤s43中,待测梁结构z方向的时域位移振动信号δz(t)的计算方法为:其中δz(t)为待测梁结构在t时刻的z方向位移,f为光学镜头组的焦距,a为待测梁结构表面的测量条纹实际宽度,p为视觉传感器的像素点点大小,n为参考帧条纹图像中长度为a的测量条纹所占的像素个数,d0为参考帧条纹图像中的测量条纹密度,d(t)为t时刻条纹图像中的测量条纹密度。
11.与现有技术相比,本发明具有以下有益效果:1)本发明是一种非接触式测量方法,组合条纹图案质量几乎可以忽略,贴附或者喷涂到待测梁结构表面,对结构的动态特性干扰极小,可以极大的减少传统接触式传感器引入的额外质量误差;2)本发明利用定位与测量相结合的方法,一次拍摄即可实现对梁结构沿中心线上多点的振动信息测量,并能识别共振频率和模态振型,无需多个传感器,也无需对梁结构进行逐点扫描;3)本发明结构简单,安装便捷,实现成本低廉,测量精度高,大大提高了模态振型的测量效率。
附图说明
12.图1是本发明实施例的装置结构示意图。
13.图2是本发明实施例中组合条纹图案示意图。
14.图3是本发明实施例中定位条纹的处理过程示意图。
15.图4是本发明实施例中测量条纹的处理方法示意图。
具体实施方式
16.下面结合附图及具体实施例对本发明作进一步的详细说明。
17.图1是本发明实施例的装置结构示意图。如图1所示,本发明提供了一种基于组合条纹的梁结构模态振型测量装置,包括待测梁结构2、视觉传感器4、光学镜头3、可调支架5和具有图像处理模块的计算机6。所述待测梁结构2表面附有组合条纹图案1,所述视觉传感器4安装于可调支架5上,以对待测梁结构表面的组合条纹图案进行实时成像,所述光学镜头3安装于视觉传感器4前端,以通过调节光学镜头得到结构表面清晰的组合条纹图像。所述视觉传感器4通过数据连接线与计算机6连接。结构受到激励产生振动时,结构表面的组合条纹图案也会随之发生振动。视觉传感器4实时采集振动时的组合条纹图像,并上传采集到的图像信息,所述计算机6通过图像处理模块对采集到的图像信息进行处理分析,进而计算得到待测梁结构的振动信息。
18.图2是本实施例中组合条纹图案的示意图。在本实施例中,所述组合条纹图案的外形为长方形,其长度往往是宽度的数倍,且都可随待测梁结构的大小设定。整个图案打印在纸张上得到具有组合条纹图案的图片,再将图片贴附于待测梁结构表面,或者整个图案不打印在纸张上而直接喷涂在待测梁结构表面,作为振动传感器。所述组合条纹图案由两种不同方向的单密度正弦条纹组成,包括设于中部沿宽度方向分布的测量条纹以及设于其两侧沿长度方向的定位条纹,两种条纹的分布方向呈90
°
角。所述定位条纹为周期为a的单密度正弦条纹,所述测量条纹为周期为b的单密度正弦条纹,两种条纹的密度都可根据实际测量要求设计为合适的数值。
19.本发明还提供了基于上述测量装置的梁结构模态振型测量方法,包括以下步骤:步骤s1:根据待测梁结构的尺寸设计组合条纹图案的大小,将组合条纹图案贴附或喷涂在待测梁结构表面。
20.步骤s2:将视觉传感器安装于可调支架上,调整好组合条纹的成像位置,并调整光学镜头,使组合条纹图案清晰地呈现在视觉传感器的中心。
21.步骤s3:当待测梁结构受到激励发生振动时,视觉传感器实时采集待测梁结构振动时的组合条纹图像,并上传到计算机。
22.步骤s4:计算机通过图像处理模块对采集到的组合条纹图像进行处理分析,通过定位与测量相结合的方法,计算得到待测梁结构的多点振动信息,进而得到共振频率和模态振型。
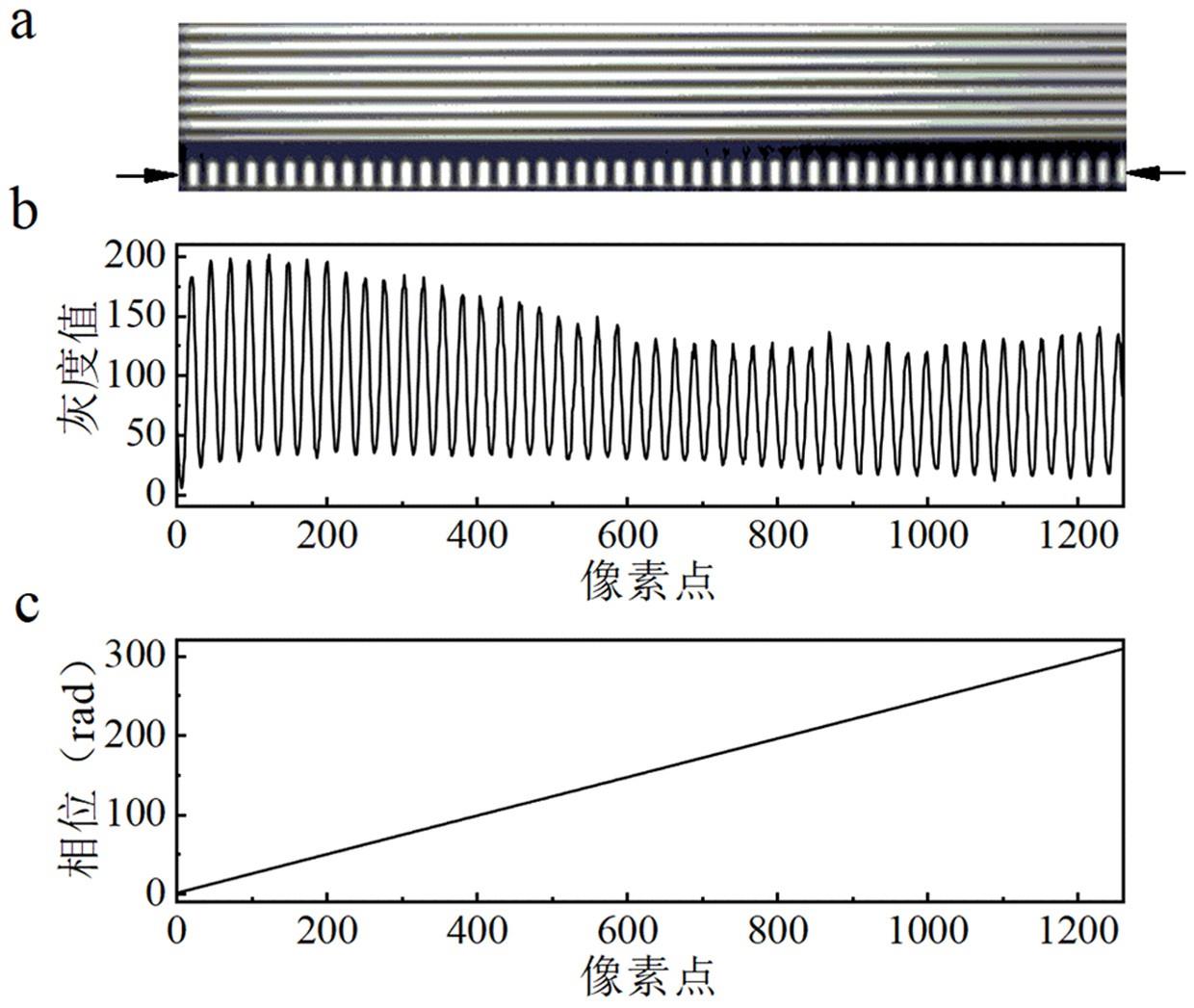
23.图3是本实施例中定位条纹的处理过程示意图。如图3(a)所示,为定位条纹的部分图片,取出箭头所表示的某一单行的定位条纹图像,得出如图3(b)所示的条纹灰度值信息。但是视觉传感器4拍摄得到的条纹信息在数值上会存在偏差且包含其他的频率信息,这就需要进行预处理。运用傅里叶变换轮廓术对定位条纹进行处理:首先,对定位条纹进行插值
重采样以提高定位精度;其次,对插值后的定位条纹图像进行快速傅里叶变换,得到定位条纹的频谱;接着,提取频谱中最大组成部分的频率,滤去一些噪声频谱;然后,对频谱进行逆傅里叶变换得到清晰的定位条纹的包裹相位信息;最后,求解定位条纹的未包裹的相位信息,得到一条单一趋势的相位曲线,如图3(c)所示。每张图像都能得到类似的相位曲线,通过对每一条纹相位曲线取某一数值的相位点,可以实现该相位点所在的测量条纹实现定位。通过取不同数值相位点的测量条纹进行处理,可以对梁结构上多点振动信息进行测量。具体处理步骤为:步骤s41:对每帧组合条纹图像两侧的定位条纹进行插值重采样以提高定位精度,然后进行快速傅里叶变换,得到定位条纹的频谱,提取频谱中最大组成部分的频率,滤去部分噪声频谱;步骤s42:对步骤s41得到的频谱进行逆傅里叶变换得到清晰的定位条纹的包裹相位信息,对包裹相位信息进行相位解调以得到未包裹的相位信息,得到一条单一趋势的相位曲线;将定位条纹的相位信息与图像的像素点一一对应,实现每帧条纹的定位;步骤s43:在每帧组合条纹图像中提取一数值相位点处的测量条纹,处理得到各帧测量条纹在该相位点处的条纹密度,并将第一帧的测量条纹作为参考,通过与参考帧的条纹密度进行对比分析,进而得到待测梁结构上该点垂直于成像平面方向的振动信息;步骤s44:通过对不同数值相位点的测量条纹进行处理,得到待测梁结构的多点振动信息,进而得到共振频率和模态振型。
24.图4是本实施例中测量条纹的测量方法示意图。在本实施例中,测量条纹1位于组合条纹的中间部分,张贴或喷涂在待测结构的表面。通过调节光学镜头3使条纹图案1在视觉传感器4上得到清晰的条纹图像。当待测结构发生振动时,其与光学镜头3之间的距离d会发生变化,进而导致视觉传感器4得到的条纹图像发生变化。通过图3中定位条纹的定位,提取不同图像的某一数值相位点所在的单列像素的测量条纹图像,可以得出条纹的分布情况,对所有每帧图像该相位点的测量条纹进行傅里叶变换(fft)且运用能量重心频谱校正算法(sccm)可得到精确的条纹密度d(t),并将梁结构静止时的条纹密度d0作为参考帧,通过条纹密度之间的变化来反映待测梁结构体的振动信息。待测梁结构的时域位移振动信号δz(t) 的计算方法为:其中δz(t)为待测梁结构在t 时刻的位移,f为光学镜头组的焦距,a为待测梁结构表面的测量条纹实际宽度,p为视觉传感器的像素点大小,n为参考帧条纹图像中长度为a的测量条纹所占的像素个数,d0为参考帧条纹图像中的测量条纹密度,d(t)为t时刻条纹图像中的测量条纹密度。
25.以上是本发明的较佳实施例,凡依本发明技术方案所作的改变,所产生的功能作用未超出本发明技术方案的范围时,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1