一种无人机抗干扰高精度导航模块的制作方法
1.本实用新型涉及导航模块技术领域,具体为一种无人机抗干扰高精度导航模块。
背景技术:
2.目前主流的无人机导航模块多采用gps芯片结合地磁传感器、气压计等传感器进行融合导航,但是由于无人机机身往往比较小,电气设备复杂,极容易造成相互的干扰。一种典型的情况是当某些数传图床靠近gps时,gps信号削弱严重,甚至无法定位。另外由于导航模块采用消费级地磁传感器如ist8310,易受导航模块上的电磁式蜂鸣器线圈和环境干扰,导致数值容易过大无法校准无人机。
3.有鉴于此特提出本实用新型。
技术实现要素:
4.本实用新型的目的在于提供一种无人机抗干扰高精度导航模块,以解决上述背景技术中提出的现有导航模块采用消费级地磁传感器如ist8310,易受导航模块上的电磁式蜂鸣器线圈和环境干扰,导致数值容易过大无法校准无人机的问题。
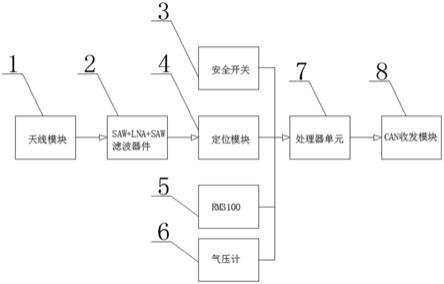
5.为实现上述目的,本实用新型提供如下技术方案:一种无人机抗干扰高精度导航模块,包括天线模块和滤波器件,所述天线模块与滤波器件电气连接,所述滤波器件与定位模块电气连接,所述定位模块、安全开关、工业地磁传感器、气压计和处理器单元电气连接,所述处理器单元与can收发模块电气连接。
6.优选的,所述滤波器件包括saw、lna、saw三个滤波元件,所述滤波器件放大gps信号并反射过滤带外信号。
7.优选的,所述安全开关包括蜂鸣器、按键开关、led。
8.优选的,所述定位模块捕捉信号并进行搜星定位。
9.优选的,所述处理器单元负责打包或者解析uav can协议数据,并根据飞行控制器指令对模块进行控制。
10.优选的,所述can收发模块负责所整个无人机的数据收发。
11.与现有技术相比,本实用新型的有益效果是:
12.无人机抗干扰高精度导航模块通过定位模块会自动工作,由 b39162b8813p810、lqp03tq4n7h02d、bga715n7三级滤波器组成的 saw+lna+saw电路的滤波器件,会将来天线模块接收的信号进行过滤、放大、再抑制放大后的带外信号,再让定位模块的gps芯片进行处理。当连接飞行控制器时,通过can收发模块收发飞行控制器数据,处理器模块处理来自气压计、定位模块、rm3100的工业级地磁传感器、及安全开关的数据进行打包,发送给飞行控制器,并根据飞行控制指令号,控制安全开关的led颜色变化、蜂鸣器音色及进行传感器校准,从而实现对对飞行控制器的融合定位导航、状态指示、上锁与解锁功能。
附图说明
13.图1为本实用新型的流程框示意图;
14.图2为本实用新型的安全开关模块电路示意图;
15.图3为本实用新型的天线模块及saw+lna+saw滤波电路示意图;
16.图4为本实用新型的定位模块电路示意图;
17.图5为本实用新型的气压计模块电路示意图。
18.图中:1、天线模块;2、滤波器件;3、安全开关;4、定位模块; 5、工业地磁传感器;6、气压计;7、处理器单元;8、can收发模块。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-5,本实用新型提供的一种实施例:一种无人机抗干扰高精度导航模块,包括天线模块1和滤波器件2,天线模块1与滤波器件2电气连接,滤波器件2包括saw、lna、saw三个滤波元件,滤波器件2放大gps信号并反射过滤带外信号,滤波器件2与定位模块4电气连接,定位模块4捕捉信号并进行搜星定位,定位模块4、安全开关3、工业地磁传感器5、气压计6和处理器单元7电气连接,处理器单元7负责打包或者解析uav can协议数据,并根据飞行控制器指令对其他模块进行控制,安全开关3包括蜂鸣器、按键开关、 led,处理器单元7与can收发模块8电气连接,can收发模块8负责所整个无人机的数据收发;
21.具体地,如图1、图2、图3、图4和图5所示,使用该机构时,首先,通过定位模块4会自动工作,由b39162b8813p810、lqp03tq4n7h02d、bga715n7三级滤波器组成的saw+lna+saw电路的滤波器件2,会将来天线模块1接收的信号进行过滤、放大、再抑制放大后的带外信号,再让定位模块4的gps芯片进行处理。当连接飞行控制器时,通过can收发模块8收发飞行控制器数据,处理器模块处理来自气压计6、定位模块4、rm3100的工业级地磁传感器5、及安全开关3的数据进行打包,发送给飞行控制器,并根据飞行控制指令号,控制安全开关3的led颜色变化、蜂鸣器音色及进行传感器校准,从而实现对对飞行控制器的融合定位导航、状态指示、上锁与解锁功能。
22.工作原理:本实用新型在使用时,通过定位模块4会自动工作,由b39162b8813p810、lqp03tq4n7h02d、bga715n7三级滤波器组成的 saw+lna+saw电路的滤波器件2,会将来天线模块1接收的信号进行过滤、放大、再抑制放大后的带外信号,再让定位模块4的gps芯片进行处理。当连接飞行控制器时,通过can收发模块8收发飞行控制器数据,处理器模块处理来自气压计6、定位模块4、rm3100的工业级地磁传感器5、及安全开关3的数据进行打包,发送给飞行控制器,并根据飞行控制指令号,控制安全开关3的led颜色变化、蜂鸣器音色及进行传感器校准,从而实现对对飞行控制器的融合定位导航、状态指示、上锁与解锁功能。
23.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新
型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1