观光景区坡度检测系统的制作方法
1.本实用新型涉及检测仪器,具体涉及一种观光景区坡度检测系统。
背景技术:
2.随着我国经济的飞速发展,各类酒店,景区,工厂,车站,公园等如雨后春笋般拔地而起,酒店,景区,售楼看房车,工厂,机场,火车站,汽车站,码头,体育馆,公园等这类场所特定区域大量使用观光景区车辆,观光景区车辆往往关系到驾驶员、乘员、行人的生命及财产安全,观光景区车的质量、性能及行驶路线对其安全运行非常重要。
3.tsgn0001-2017《场(厂)内机动车辆安全技术监察规程》中对观光景区坡度要求如下:观光车行驶的路线中,最大坡度不得大于10%(坡长小于20m的短坡除外),观光列车的行驶路线中,最大坡度不得大于4%(坡长小于20m的短坡除外),因此,为了观光车辆的安全行驶,针对观光景区坡度的检测就显得尤为重要。
4.观光景区坡度检测属于特种设备安全技术监察中一项重要的安全检验项目,它关系到驾驶员、乘员、行人的生命及财产安全,由于旅游景区面积较大,且景区内的道路状况较复杂,各个景点的道路宽窄不一、坡度不同,这要求景区观光车宽度和爬坡度适合景区道路的宽度与坡度,如果景区坡道很陡,一旦在景区的半坡停车,观光车可能出现车辆打横,甚至翻滚等为危险,特别是多节车厢的观光车,倒车也很难控制,从而导致很多不该发生的悲剧,严重危及人身以及他人财产安全,因此,针对观光景区内观光车辆行驶速度、行驶坡度、行驶距离的检测成为了特种设备安全技术监察中亟待解决的问题。
5.传统市场上观光景区坡度的检测,利用坡度测量尺对观光景区坡度进行测量,仅能测量景区坡度,并且存在测量精度严重不足、误差较大、测量过程复杂、无数据存储等问题。
技术实现要素:
6.本实用新型的目的在于克服上述不足问题,以tsgn0001-2017《场(厂)内机动车辆安全技术监察规程》为指针,提供一种操作简单、测量精准的观光景区坡度检测系统。
7.本实用新型为实现上述目的所采用的技术方案是:观光景区坡度检测系统,包括行驶距离测量结构、坡度检测结构、人机处理终端,所述行驶距离测量结构包括主体模块、测距轮信号采集模块,所述主体模块包括设置在主体壳体内的距离测量信号采集处理主板、供电电池一,所述供电电池一与距离测量信号采集处理主板电连接,所述距离测量信号采集处理主板与人机处理终端信号连通,所述测距轮信号采集模块包括测距轮、编码器,所述测距轮的测距轴安装在架体上,所述编码器的转轴与测距轮的测距轴连接,二者同轴,所述编码器与距离测量信号采集处理主板电连接,所述主体壳体安装在架体上,所述主体壳体上安装有测距轮高度调节模块,所述坡度检测结构包括设置在外壳内的加速度传感器、距离信号采集处理主板、供电电池二,所述加速度传感器、供电电池二均与距离信号采集处理主板电连接,所述距离信号采集处理主板与人机处理终端信号连通。
8.所述架体包括轴承盖、编码器壳体,所述编码器设置在编码器壳体内,所述测距轮的测距轴一端通过轴承与轴承盖连接,所述测距轮的测距轴的另一端与编码器连接,所述编码器安装在编码器壳体内。
9.所述主体壳体通过减震装置与架体连接,所述减震装置包括减震导向杆、减震弹簧,所述减震导向杆一端安插在主体壳体上开设的导向孔内,二者之间安装所述减震弹簧,所述减震导向杆另一端安插在架体上开设的定位孔内。
10.所述减震导向杆与架体上的定位孔之间安装有限位键。
11.所述测距轮高度调节模块包括长调节杆、短调节杆、主体连接板、磁铁固定板,所述长调节杆两端分别通过旋转阻尼转轴与短调节杆、磁铁固定板连接,所述短调节杆另一端通过微型旋转阻尼转轴与主体固定板连接,所述主体固定板与主体壳体连接。
12.所述磁铁固定板上安装有包胶磁铁一。
13.所述主体壳体内设置有蓝牙无线传输模块一,所述距离测量信号采集处理主板通过蓝牙无线传输模块一与人机处理终端蓝牙无线信号连通,所述外壳内设置有蓝牙无线传输模块二,所述距离信号采集处理主板通过蓝牙无线传输模块二与人机处理终端蓝牙无线信号连通。
14.所述外壳上安装有包胶磁铁二。
15.本实用新型的特点是:可实时观察车辆行驶速度、行驶坡度、行驶距离并可对测量数据及测试结果进行存储及调用,检测效率高、轻巧便携、检测精度高、操作简单。
附图说明
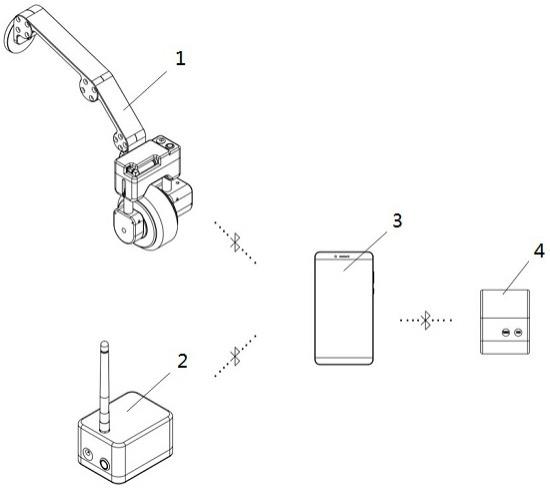
16.图1是本实用新型的结构示意图。
17.图2是本实用新型的主体模块的结构示意图。
18.图3是本实用新型的主体模块的剖视图。
19.图4是本实用新型的测距轮信号采集模块的结构示意图。
20.图5是本实用新型的测距轮信号采集模块的剖视图。
21.图6是本实用新型的测距轮高度调节模块的结构示意图。
22.图7是本实用新型的测距轮高度调节模块的剖视图。
23.图8是本实用新型的坡度检测结构的结构示意图。
24.图9是本实用新型的坡度检测结构的剖视图。
25.图10是本实用新型的电路示意图。
26.其中:1、行驶距离测量结构
ꢀꢀ
11、主体模块
ꢀꢀ
111、主体壳体
ꢀꢀ
112、蓝牙无线传输模块一
ꢀꢀ
113、供电电池一
ꢀꢀ
114、距离测量信号采集处理主板
ꢀꢀ
115、减震弹簧
ꢀꢀ
116、减震导向杆
ꢀꢀ
12、测距轮信号采集模块
ꢀꢀ
121、测距轮
ꢀꢀ
122、编码器
ꢀꢀ
123、测距轴
ꢀꢀ
124、轴承盖
ꢀꢀ
125、编码器壳体
ꢀꢀ
126、限位键
ꢀꢀ
127、定位孔
ꢀꢀ
13、测距轮高度调节模块
ꢀꢀ
131、包胶磁铁一
ꢀꢀ
132、长调节杆
ꢀꢀ
133、短调节杆
ꢀꢀ
134、磁铁固定板
ꢀꢀ
135、主体连接板
ꢀꢀ
136、旋转阻尼转轴 137、微型旋转阻尼转轴
ꢀꢀ
2、坡度检测结构
ꢀꢀ
21、外壳
ꢀꢀ
22、加速度传感器
ꢀꢀ
23、距离信号采集处理主板
ꢀꢀ
24、蓝牙无线传输模块二
ꢀꢀ
25、供电电池二
ꢀꢀ
26、包胶磁铁二
ꢀꢀ
3、人机处理终端
ꢀꢀ
4、打印机。
具体实施方式
27.如图1-10所示,本实用新型为一种观光景区坡度检测系统,包括行驶距离测量结构1、坡度检测结构2、人机处理终端3,所述行驶距离测量结构1、坡度检测结构2均与人机处理终端3蓝牙无线信号连接。
28.所述行驶距离测量结构1包括主体模块11、测距轮信号采集模块12,所述主体模块11包括设置在主体壳体111内的距离测量信号采集处理主板114、供电电池一113、蓝牙无线传输模块一112,所述供电电池一113、蓝牙无线传输模块一112均与距离测量信号采集处理主板114电连接,所述供电电池一113用于给行驶距离测量结构1供电,所述距离测量信号采集处理主板114通过蓝牙无线传输模块一112与人机处理终端3蓝牙无线信号连通,所述测距轮信号采集模块12包括测距轮121、编码器122,所述测距轮121的测距轴123安装在架体上,所述架体包括轴承盖124、编码器壳体125,所述测距轴123一端通过轴承与轴承盖124连接,所述测距轴123的另一端与编码器122的转轴连接,二者同轴,所述编码器122安装在编码器壳体125内,所述编码器122与距离测量信号采集处理主板114电连接,所述编码器122用于采集观光车辆行驶距离,测量时,测距轮121随观光车辆的车轮一同行驶,测距轮121转动带动测距轴123旋转,即编码器122的转轴旋转,测距轮121的转动使得编码器122产生脉冲信号,距离测量信号采集处理主板114采集脉冲信号,根据单位时间采集到的脉冲数及测距轮直径得到观光车辆行驶速度,距离测量信号采集处理主板114利用编码器122将采集到的信号传递给人机处理终端3,所述主体壳体111通过减震装置与架体连接,所述减震装置包括两根减震导向杆116,两根所述减震导向杆116的一端均安插在主体壳体111上对应开设的导向孔117内,每根减震导向杆116与其对应的导向孔117之间均安装有减震弹簧116,两根所述减震导向杆116的另一端均安插在架体上对应开设的定位孔127内,其中一个定位孔127开设在轴承盖124上,另一个定位孔127开设在编码器壳体125上,每根减震导向杆116与其对应的定位孔127之间安装有限位键126,所述减震导向杆116通过限位键126固定在架体上,所述减震导向杆116内装减震弹簧115,用来抑制减震弹簧115吸震后反弹时的震荡及来自所测路面的冲击,以改善行驶距离测量结构1随观光车辆行驶的平顺性,尤其在经过不平路面时,减震弹簧115可以有效过滤路面的震动,且在观光车辆行驶过程中使测距轮121与地面紧密贴合,减小测量结果误差,所述主体壳体111上安装有测距轮高度调节模块,所述测距轮高度调节模块作为调节夹具将行驶距离测量结构1定位于观光车辆的车尾,所述测距轮高度调节模块包括长调节杆132、短调节杆133、主体连接板135、磁铁固定板134,所述长调节杆132两端分别通过各自的旋转阻尼转轴136与短调节杆133、磁铁固定板134连接,所述短调节杆133另一端通过微型旋转阻尼转轴137与主体固定板135连接,所述旋转阻尼转轴136、微型旋转阻尼转轴137均是利用碟簧产生阻尼作用,可将各连接杆旋转任意角度,方便不同检测车辆使用,所述主体固定板135通过螺钉与主体壳体111固定连接,所述磁铁固定板134上安装有包胶磁铁一131,通过包胶磁铁一131将行驶距离测量结构1定位于观光车辆的车尾。
29.所述坡度检测结构2包括设置在外壳21内的加速度传感器22、距离信号采集处理主板23、供电电池二25、蓝牙无线传输模块二24,所述加速度传感器22、供电电池二25、蓝牙无线传输模块二24均与距离信号采集处理主板23电连接,所述加速度传感器22能够分别测量x、y、z三个方面的加速度值,其作用为针对观光车辆行驶过程中观光车辆行驶坡度、行驶
速度及其曲线行驶距离等数据进行高精度测量,所述供电电池二25为坡度检测结构2供电,所述距离信号采集处理主板23通过蓝牙无线传输模块二24与人机处理终端3蓝牙无线信号连通,所述外壳21上安装有包胶磁铁二26,通过包胶磁铁二26将坡度检测结构2吸附于所要检测的观光车辆的合适位置。
30.所述人机处理终端3为具有蓝牙通讯功能的电子设备,可为智能手机、平板电脑、笔记本等电子设备,所述人机处理终端对数据进行分析及管理,其内置的测量软件对采集到的信号进行处理后得到观光车辆运行过程中可实现现场坡度、车辆行驶距离、车辆运行速度及其曲线的实时采集及位置标记等数据,显示界面采用图像及数据双重直观显示被测状态,同时可进行被测量单位转换,便于后期判定,并且可对检测结果进行保存、查看、检索、上传等,所述人机处理终端3可与打印机4连接,所述打印机4为具有蓝牙通讯功能的打印机,通过人机处理终端3发出打印指令使得打印机4打印测试结果。
31.本实用新型检测过程如下:首先调节长调节杆132、短调节杆133及磁铁固定板134的角度,通过包胶磁铁一131将行驶距离测量结构1吸附于观光车辆尾部,使测距轮121与地面接触并且减震弹簧115具有一定预压量,将行驶距离测量结构1开机,供电电池一113给行驶距离测量结构1供电,利用包胶磁铁二26将坡度检测结构2吸附于观光车辆合理位置,将坡度检测结构2开机,供电电池二25给坡度检测结构2供电,打开人机处理终端3内的测量软件,给打印机4供电,建立人机处理终端3、行驶距离测量结构1、坡度检测结构2及打印机4之间的蓝牙无线信号连接,并在测量软件中设置检测参数及基本信息,点击测量软件开始进行测试,驾驶员驾驶观光车辆沿需检测的观光景区绕行,测距轮121随观光车辆旋转,将编码器122产生的脉冲信号传递给距离测量信号采集处理主板114,距离测量信号采集处理主板114通过蓝牙无线传输模块一112将数据信号传递到人机处理终端3,观光车辆行驶过程中加速度传感器22将测量到的x、y、z三个方面的加速度值,传递给距离信号采集处理主板23,距离信号采集处理主板23通过蓝牙无线传输模块二24传递到人机处理终端3,通过人机处理终端3中测量软件将收集到的信号进行处理,从而得到观光车辆行驶过程中观光车辆行驶坡度、行驶速度及其曲线行驶距离等数据,保存测试数据,并可对结果进行查看、检索,还可通过打印机4打印测试结果。
32.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本实用新型的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1