一种高精度研磨金相分析设备的制作方法
1.本实用新型涉及研磨装置技术领域,具体涉及一种高精度研磨金相分析设备。
背景技术:
2.市面上现成的研磨机都是采用气缸往下压的方式研磨或者人员用手按压研磨,对研磨的进给量没有明确定义,只能根据时间和经验来看是否研磨到需要的高度,这就需要人员反复来回观察,存在劳动强度大的缺点,而且显微镜分析金相的部件会放置在一旁,人员需要将样品来回取放观察,重复性动作过多。
技术实现要素:
3.本实用新型针对上述问题,提供一种高精度研磨金相分析设备。
4.本实用新型的目的可以通过下述技术方案来实现:一种高精度研磨金相分析设备,包括机架、研磨机、龙门架、x轴移动机构、z轴移动机构、研磨旋转装置、基准定位组件、金相分析装置;所述研磨机、龙门架、基准定位组件、金相分析装置安装于机架的工作台上,所述龙门架的横梁跨设于研磨机、基准定位组件、金相分析装置的上方,龙门架的横梁上安装有x轴移动机构,所述x轴移动机构上安装有z轴移动机构,所述z轴移动机构上安装有研磨旋转机构。
5.进一步地,所述研磨旋转装置包括z轴转接板、滑轨固定板、旋转轴挡板、直线滑轨、滑块固定板、上连接板、下连接板、力监控传感器、电机固定座、上固定轴承座、下固定轴承座、研磨旋转电机、主动带轮、旋转轴、从动带轮、同步带、样品夹;所述z轴转接板安装于z轴移动机构上,z轴转接板上安装有竖向设置的滑轨固定板和水平设置的旋转轴挡板,所述滑轨固定板的下沿与旋转轴挡板连接,滑轨固定板的一面上安装有直线滑轨,所述直线滑轨的滑块上安装有滑块固定板,所述滑块固定板的一面上安装有电机固定座、上固定轴承座、下固定轴承座,所述电机固定座上安装有研磨旋转电机,所述上固定轴承座和下固定轴承座上安装有旋转轴,所述研磨旋转电机和旋转轴通过主动带轮、从动带轮、同步带传动连接,所述旋转轴的下端穿过旋转轴挡板且其上安装有样品夹,所述滑轨固定板和滑块固定板的另一面上分别安装有上连接板和下连接板且上连接板和下连接板之间柔性连接有力监控传感器。
6.进一步地,所述基准定位组件包括基准定位固定座、高精度位移传感器;所述基准定位固定座垂直安装于机架的工作台上,所述高精度位移传感器安装于基准定位固定座上。
7.进一步地,所述金相分析装置包括y轴移动机构、y轴转接板、相机固定板、光源、微调座、相机、远心镜头,所述y轴移动机构安装于机架的工作台上,所述相机固定板通过y轴转接板安装于y轴移动机构且沿竖向设置,相机固定板上安装有上下布置的光源和微调座,所述微调座上安装有相机,所述相机上安装有向上朝向光源的远心镜头。
8.进一步地,所述机架的底部设有脚轮。
9.进一步地,所述研磨机上设有沿x轴方向分布的粗铣槽和精铣槽。
10.进一步地,所述研磨机通过定位块定位在工作台上。
11.进一步地,所述基准定位组件位于研磨机和金相分析装置之间。
12.进一步地,还包括触摸屏,所述触摸屏与研磨机、x轴移动机构、z轴移动机构、研磨旋转装置、金相分析装置连接。
13.进一步地,还包括控制开关组。
14.与现有技术相比,本实用新型的有益效果:采用移动机构移动研磨旋转装置,配合研磨机实现研磨进给量可控的高精度研磨;移动机构可手动控制,配合金相分析装置方便观察金相研磨面;采用基准定位组件进行研磨面和相机对焦面的基准校准;减少了人工操作的影响,降低了劳动强度,提高了研磨金相分析的效率。
附图说明
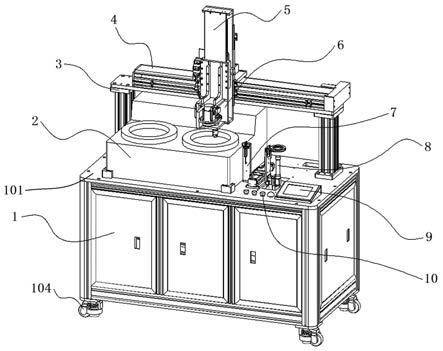
15.图1为本实用新型的整体结构示意图。
16.图2为本实用新型中的研磨旋转装置的结构示意图。
17.图3为本实用新型中的研磨旋转装置的正视图。
18.图4为本实用新型中的基准定位组件的结构示意图。
19.图5为本实用新型中的金相分析装置的结构示意图。
20.图中部件标号如下:
21.1机架、101工作台、102脚轮;
22.2研磨机;
23.3龙门架;
24.4 x轴移动机构;
25.5 z轴移动机构;
26.6研磨旋转装置、601 z轴转接板、602滑轨固定板、603旋转轴挡板、604加强板、605加强筋、606直线滑轨、607滑块固定板、608上连接板、609下连接板、610力监控传感器、611电机固定座、612上固定轴承座、613下固定轴承座、614研磨旋转电机、615主动带轮、616旋转轴、617从动带轮、618同步带、619样品夹;
27.7基准定位组件、701基准定位固定座、702高精度位移传感器、703固定座连接板、704固定座加强筋;
28.8金相分析装置、801 y轴移动机构、802移动模组固定板、803 y轴转接板、804相机固定板、805加强筋、806光源、807微调座、808相机、809远心镜头;
29.9触摸屏;
30.10控制开关组;
31.11样品。
具体实施方式
32.以下结合附图详细说明本实用新型的具体实施方式,使本领域的技术人员更清楚地理解如何实践本实用新型。尽管结合其优选的具体实施方案描述了本实用新型,但这些实施方案只是阐述,而不是限制本实用新型的范围。
33.参见图1,一种高精度研磨金相分析设备,包括机架1、研磨机2、龙门架3、x轴移动机构4、z轴移动机构5、研磨旋转装置6、基准定位组件7、金相分析装置8、触摸屏9、控制开关组10。
34.所述机架1为长方体结构,其可采用铝型材搭建,机架1的底面四角可安装脚轮102,方便设备移动。机架1的顶面设有工作台101,保证平面度,工作台101上安装有研磨机2、龙门架3、基准定位组件7、金相分析装置8、触摸屏9、控制开关组10。
35.所述研磨机2属于现有技术,其上设有沿x轴方向分布的粗铣槽和精铣槽,研磨机2采用四个定位块定位在工作台101上。
36.所述龙门架3采用精磨的铝型材搭建,成本低,稳定性较好,龙门架3的横梁跨设于研磨机2、基准定位组件7、金相分析装置8的上方,龙门架3的横梁上沿长度方向安装有x轴移动机构4,所述x轴移动机构4上安装有z轴移动机构5,x轴移动机构4带动z轴移动机构5沿x轴方向移动,所述z轴移动机构5上安装有研磨旋转机构,z轴移动机构5带动研磨旋转机构沿z轴方向移动。本实施例中,x轴移动机构4选用滚珠丝杆模组,其重复精度0.01mm,能达到较高的水平移动精度;z轴移动机构5选用直线电机,其采用光栅尺定位,重复精度5um,能够满足精密磨削的要求。
37.参见图2和图3,所述研磨旋转装置6主要包括z轴转接板601、滑轨固定板602、旋转轴挡板603、直线滑轨606、滑块固定板607、上连接板608、下连接板609、力监控传感器610、电机固定座611、上固定轴承座612、下固定轴承座613、研磨旋转电机614、主动带轮615、旋转轴616、从动带轮617、同步带618、样品夹619。
38.所述z轴转接板601安装于z轴移动机构5上,并由z轴移动机构5带动沿z轴方向移动,z轴转接板601上安装有竖向设置的滑轨固定板602和水平设置的旋转轴挡板603,所述滑轨固定板602的下沿与旋转轴挡板603连接。z轴转接板601上还安装有水平设置的加强板604和竖向设置的加强筋605,所述加强板604与滑轨固定板602的上沿连接,保证强度,所述加强筋605连接z轴转接板601和加强板604,保证滑轨固定板602及其上部件的垂直度和稳定性。
39.所述滑轨固定板602的一面上安装有两根竖向平行设置的直线滑轨606,每根所述直线滑轨606上安装有两个滑块上,四个滑块上安装有滑块固定板607,滑轨固定板602和滑块固定板607的另一面上分别安装有上连接板608和下连接板609,所述上连接板608和下连接板609之间柔性连接有力监控传感器610,所述力监控传感器610实时监控研磨进给过程中的力的变化,防止研磨时过载,保护z轴移动机构5。
40.所述滑块固定板607的一面上安装有电机固定座611、上固定轴承座612、下固定轴承座613,所述电机固定座611上安装有研磨旋转电机614,所述研磨旋转电机614的输出轴沿竖向设置且连接有主动带轮615,所述上固定轴承座612和下固定轴承座613上安装有竖向设置的旋转轴616,所述旋转轴616上安装有从动带轮617,从动带动和主动带轮615通过同步带618传动连接,旋转轴616的下端穿过旋转轴挡板603且其上安装有样品夹619。
41.参见图1,所述基准定位组件7位于研磨机2和金相分析装置8之间,该布局便于对样品11进行研磨前和金相分析前的基准定位。参见图4,所述基准定位组件7主要包括基准定位固定座701、高精度位移传感器702,所述基准定位固定座701垂直安装于机架1的工作台101上,基准定位固定座701还通过固定座连接板703和固定座加强筋704与工作台101连
接,保证垂直度和稳定性,基准定位固定座701上安装有高精度位移传感器702。高精度位移传感器702测定的基准面和研磨机2的磨削面相对距离恒定,这样z轴移动机构5带动研磨旋转装置6移动时,用样片的底面与靠基准,从而归零后确定下降的高度;高精度位移传感器702测定的基准面和金相分析装置8的相机808对焦面相对距离恒定,这样每次在相机808对焦前进行基准校准,之后移动在固定高度上方即可完成相机808对焦。
42.参见图5,所述金相分析装置8包括y轴移动机构801、y轴转接板803、相机固定板804、光源806、微调座807、相机808、远心镜头809。所述y轴移动机构801通过移动模组固定板802安装于机架1的工作台101上,本实施例中,y轴移动机构801选用滚珠丝杆模组。所述y轴转接板803安装于y轴移动机构801上,并由y轴移动机构801带动沿y轴移动,y轴转接板803上安装有竖向设置的相机固定板804,y轴转接板803和相机固定板804之间还连接有加强筋805,以保证相机固定板804的垂直度和稳定性。所述相机固定板804上安装有上下布置的光源806和微调座807,所述微调座807上安装有相机808,微调座807方便调节相机808和光源806的相对距离,以便成像清晰。所述相机808上安装有远心镜头809,所述远心镜头809向上朝向光源806设置,本实施例的远心镜头809可以将拍照的图像放大50倍,同时能够显示出研磨后平面的金相组织。
43.所述触摸屏9用于控制研磨机2、x轴移动机构4、z轴移动机构5、研磨旋转装置6、金相分析装置8及设置参数。
44.所述控制开关组10用于控制设备的启闭和停止。
45.操作时,首先,操作人员将需要研磨的样品11放置到研磨旋转装置6的样品夹619中夹紧,在触摸屏9中输入需要研磨的进给高度、进给时间、研磨旋转电机614的转速。
46.接着,控制开关组10开机,当设备运行时,设备得到用户定义的参数后,x轴移动机构4会先带动z轴移动机构5移动至基准定位组件7的上方,z轴移动机构5带着研磨旋转装置6下降,通过样品11底面接触基准定位组件7的高精度位移传感器702进行零点归零后,z轴移动机构5抬升固定高度。之后,x轴移动机构4带动z轴移动机构5移动至研磨机2的粗铣槽上方,z轴移动机构5先下降固定高度,使样品11接触砂纸,再带动研磨旋转装置6按照设定的进给高度自动下降进给距离,同时研磨旋转装置6的研磨旋转电机614带动旋转轴616旋转,由于旋转轴616和粗铣槽的转速有一定的速度差,能够保证样品11的研磨平面的平整性。当按照设定的进给时间完成对样品11粗研磨后,z轴移动机构5再抬升固定高度。同样的步骤对样品11进行精研磨。进给研磨过程中,力监控传感器610实时监控研磨进给过程的力的变化,当出现进给参数过大导致过载时,中断z轴移动机构5的进给。
47.完成研磨后,x轴移动机构4和z轴移动机构5先通过移动到达基准定位组件7处进行零点归零,x轴移动机构4再带动z轴移动机构5移动至金相分析装置8的上方,z轴移动机构5带动研磨旋转装置6按照设定参数自动下降至相机808的焦距位置。之后,设备释放x轴移动机构4和金相分析装置8的y轴移动机构801的控制,操作人员可以在触摸屏9上操控x轴移动机构4和y轴移动机构801,让样品11在远心镜头809上方水平移动进行观察。操作人员查看样品11是否已经研磨到想要得到的参数,如果符合预期,则取出样品11,如果还需研磨,再次在触摸屏9中设定参数即可,重复上述操作。
48.应当指出,对于经充分说明的本实用新型来说,还可具有多种变换及改型的实施方案,并不局限于上述实施方式的具体实施例。上述实施例仅仅作为本实用新型的说明,而
不是对本实用新型的限制。总之,本实用新型的保护范围应包括那些对于本领域普通技术人员来说显而易见的变换或替代以及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1