一种基于数字全息显微技术的热流体动力学测量装置
1.本实用新型涉及流体动力学测量领域,具体涉及一种基于数字全息显微技术的热流体动力学测量装置。
背景技术:
2.流体动力学测量中,常常通过测量流体的浓度梯度来研究计算各项动力学参数。
3.荧光标记作为传统的用于分析微流体中浓度梯度的方法,具有较高灵敏度、特异性以及与高通量微流控系统的兼容性,但化学标记不可避免地会干扰测定,并且长时间的监测下,光漂白效应可能会限制测量精度;对于定量分析来说,测定的荧光信号偏差不均匀。
4.其他无标记检测手段,比如基于表面增强拉曼散射、拉曼光谱和核磁共振光谱等方法,均是基于吸收率的光谱方法。这些方法通常都受到单点测量的限制,使其几乎无法应用于微通道中浓度梯度的全场监控,且动态测量的时间分辨率较差。
5.数字全息显微术(dhm)可以用来显示微通道中的扩散区域,所以也被用作研究流体动力学的无标记定量方法,但在不进行相移的情况下,只能得到定性结果。为定量测量微通道中的浓度梯度,需要引入相移元件,比如步进电机、反射镜位移和光栅移动等,但这很容易使系统产生机械不稳定性,并且需要在测量之前进行波长校准,因此,它们很难与微流控网络集成,用于实验室芯片应用。另外,流体扩散是随时间变化的,它依赖于两种流体之间的浓度差和局部速度,而传统的时间相移方案不足以快速、准确地解决瞬态事件。
技术实现要素:
6.鉴于上述技术问题,本实用新型提供的技术方案为:基于数字全息显微技术,提出了一种基于数字全息显微技术的热流体动力学测量装置。
7.所述一种基于数字全息显微技术的热流体动力学测量装置,包括:干涉装置、成像系统、流体控制系统、相移器和待测芯片。
8.干涉装置包括:由连续激光器(型号为:msl
‑
fn
‑
671
‑
100mw)、分光镜、高反镜、物镜、双凸透镜和目镜组成的马赫曾德干涉系统;
9.成像系统包括:面阵ccd(型号为:opt
‑
cc/m130
‑
gh
‑
04)、采集卡和电脑;
10.流体控制系统靠双通道注射泵(型号为:lead fluid tyd02
‑
02)实现;
11.相移器与待测芯片是由pdms(聚二甲基硅氧烷)在硅片上倒模制成的。
12.相移器的结构为蛇形微混合器与相移腔室组成,通过微混合器调节腔室中流体的浓度以改变折射率来实现相移的调节。
13.待测芯片的结构为一个h型微流控空腔,可提供热流体动力学的扩散区,以产生浓度梯度场。
14.一种基于数字全息显微技术的热流体动力学测量方法应用于上述装置,包括以下步骤:
15.s1、用面阵ccd采集六张全息图。包括五张物光经过充满去离子水的待测芯片且保持不变,参考光相位每次相差β(调控的相位分别为
‑
2β、
‑
β、0、β、2β)的基础全息图;另有一张物光经过待测芯片扩散区的浓度梯度场,参考光相位调控为0的瞬态全息图。
16.首先,使用双通注射泵将去离子水注入待测芯片的h型腔中,当h型腔充满了纯去离子水时,通过相移器以β相移的得到五个基础全息图;然后,将氯化钙溶液和去离子水两种流体注射到待测芯片的h型腔后,通过氯化钙溶液和去离子水之间的扩散,产生浓度梯度场,以便稍后执行五步相移法。
17.面阵ccd采集的基础全息图的强度i1可描述为:
[0018][0019]
其中i
o
和i
r
分别代表物光和参考光的强度,是物光和参考光之间的光学相位差,五个相移步长均表示为β。
[0020]
将五个基础全息图记录为参照,将氯化钙溶液和去离子水同时注射入待测芯片的h型腔的通道。在这两种流体之间的浓度差的驱动下,会在扩散区及其下游产生溶剂的浓度梯度场。浓度的空间变化可引起物波的局部光学相位差δ。因此,ccd记录的这种瞬态全息图的强度i2可以描述为:
[0021][0022]
s2、基于全息图,根据五步相移法解析出待测芯片浓度梯度场不连续的包裹相位图。
[0023]
次级条纹图的强度i
s
可以通过从等式(1)中减去等式(2)获得,其描述为:
[0024][0025]
上述方程中包含的变量的第二个正弦项在空间上的变化要比δ穿过图像的变化更快,换句话说,第二个正弦项具有较高的条纹空间频率。因此,可以执行傅立叶变换和低通滤波以消除初始光学相位差在执行低通滤波及傅立叶逆变换后,相减后的五个图像分别表示为i
a
,i
b
,i
c
,i
d
和i
e
。因此,可以将由局部浓度变化引起的相位差δ计算为等式(4)及其空间分布。
[0026][0027]
s3、根据s2得到的浓度梯度场不连续的包裹相位图,运用相位解包裹算法(戈德斯坦相位展开法)得到浓度梯度场连续的相位分布图。
[0028]
s4、根据s3得到的连续的相位分布图重建扩散区的折射率分布图。
[0029]
s5、根据s4得到的扩散区的折射率分布图对不同条件下扩散区浓度梯度场进行定量测量,对扩散区浓度梯度场的扩散系数、佩克莱数等热流体动力学进行精确测量。
[0030]
本实用新型的有益效果是:
[0031]
一种基于数字全息显微技术的热流体动力学测量装置,通过微型混合器对相移室内流体的折射率进行流体动力调控,实现了微流控相移元件的集成化,制作工艺简单,工作
原理可靠,简化了相移操作,降低了操作成本。所述系统使用的图像处理算法使微通道中的扩散区域的浓度梯度场可视化,实现了对热流体动力学的定量分析,具备无标记、集成性、稳定性、可完成瞬态测量等优点。
附图说明
[0032]
下面将结合附图及实施例对本实用新型作进一步说明,附图中:
[0033]
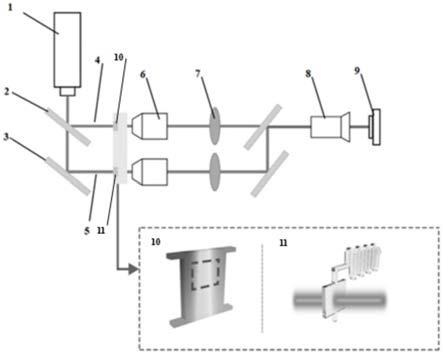
图1为本实用新型实施例中一种基于数字全息显微技术的热流体动力学测量装置结构图;
[0034]
图2为本实用新型实施例中一种基于数字全息显微技术的热流体动力学测量方法的具体步骤图
[0035]
其中(a)为扩散区的明场图像;
[0036]
(b)为浓度梯度场的瞬态全息图和五个基础全息图相减后的次级条纹图;
[0037]
(c)为次级条纹图的离散傅立叶变换;
[0038]
(d)为高斯滤波和傅立叶逆变换;
[0039]
(e)为使用五步相移法获得的包裹相位图;
[0040]
(f)为浓度梯度场的折射率分布图;
[0041]
(g)为浓度分布图;
[0042]
图3为本实用新型实施例中图2对应的流程框图;
[0043]
图4为本实用新型实施例中不同的佩克莱数下产生的浓度梯度图;
[0044]
图5为本实用新型实施例中不同驱动梯度下产生的浓度梯度图。
具体实施方式
[0045]
为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本实用新型的具体实施方式。
[0046]
请参考图1,一种基于数字全息显微技术的热流体动力学测量装置结构图,包括:干涉装置、成像系统、流体控制系统、相移器10和待测芯片11。
[0047]
干涉装置包括:由连续激光器1(型号为:msl
‑
fn
‑
671
‑
100mw)、分光镜2、高反镜3、物镜6、双凸透镜7和目镜8组成的马赫曾德干涉系统;
[0048]
成像系统包括:面阵ccd 9(型号为:opt
‑
cc/m130
‑
gh
‑
04)、采集卡和电脑;
[0049]
流体控制系统靠双通道注射泵(型号为:lead fluid tyd02
‑
02)实现;
[0050]
相移器10与待测芯片11是由pdms(聚二甲基硅氧烷)在硅片上倒模制成的。
[0051]
相移器10的结构为蛇形微混合器与相移腔室组成,通过微混合器调节腔室中流体的浓度以改变折射率来实现相移的调节。
[0052]
待测芯片11的结构为一个h型微流控空腔,可提供热流体动力学的扩散区,以产生浓度梯度场,图1中待测芯片的虚线区域表示浓度梯度场的成像区域。
[0053]
所述系统采用一种基于数字全息显微技术的热流体动力学测量方法,包括以下步骤:
[0054]
s1、用面阵ccd采集六张全息图。包括五张物光经过充满去离子水的待测芯片且保持不变,参考光相位每次相差β(调控的相位分别为
‑
2β、
‑
β、0、β、2β)的基础全息图;另有一
张物光经过待测芯片扩散区的浓度梯度场,参考光相位调控为0的瞬态全息图。
[0055]
首先,使用双通注射泵将去离子水注入待测芯片11的h型腔中,当h型腔充满了纯去离子水时,通过相移器10以β相移得到5个基础全息图;然后,将氯化钙溶液和去离子水两种流体注射到待测芯片11的h型腔后,通过氯化钙溶液和去离子水之间的扩散,产生浓度梯度场,以便稍后执行五步相移法。
[0056]
面阵ccd 9采集的基础全息图的强度可描述为:
[0057][0058]
其中i
o
和i
r
分别代表物光和参考光的强度,是物光和参考光之间的光学相位差,五个相移步长均表示为β。
[0059]
将五个基础全息图记录为参照,将氯化钙溶液和去离子水同时注射入h型腔的通道。在这两种流体之间的浓度差的驱动下,会在扩散区及其下游产生溶剂的浓度梯度场。浓度的空间变化可引起物波的局部光学相位差δ。因此,面阵ccd 9记录的这种瞬态全息图可以描述为:
[0060][0061]
s2、基于全息图,根据五步相移法解析出待测芯片浓度梯度场不连续的包裹相位图。
[0062]
次级条纹图可以通过从等式(1)中减去等式(2)获得,并描述为:
[0063][0064]
上述方程中包含的变量的第二个正弦项在空间上的变化要比δ穿过图像的变化更快,换句话说,第二个正弦项具有较高的条纹空间频率,这里请参考图2(c)。因此,可以执行傅立叶变换和低通滤波以消除初始光学相位差在执行低通滤波之后,相减后的五个图像分别表示为i
a
,i
b
,i
c
,i
d
和i
e
,请参考图2(d)。因此,可以将由局部浓度变化引起的相位差δ计算为等式(4)及其空间分布,请参考图2(e)。
[0065][0066]
s3、根据s2得到的浓度梯度场不连续的包裹相位图,运用相位解包裹算法(戈德斯坦相位展开法)得到浓度梯度场连续的相位分布图。
[0067]
使用戈德斯坦相位展开法将图2(e)中不连续的包裹相位图展开为连续的相位分布图。
[0068]
s4、根据s3得到的连续的相位分布图重建扩散区的折射率分布图。
[0069]
展开的连续的相位图用来重建图2(f)中所示的折射率分布和图2(g)中相应的浓度分布。图3中的流程图展示了上述过程。
[0070]
s5、根据s4得到的扩散区的折射率分布图对不同条件下扩散区浓度梯度场进行定量测量及其扩散系数、佩克莱数等热流体动力学进行精确测量。
[0071]
具体实施例一:
[0072]
为证明本实用新型可以用来检测在不同的佩克莱数(p
e
=lν/d,流体动力参数中,该数量化了平流和扩散之间的比率,其中l是特征长度,ν是局部流速,d是扩散系数)下产生的浓度梯度,分别以相同的流量从双通注射泵的两个进口向t型接头注入1mol/l的氯化钙溶液和去离子水(请参考图1)。通过改变两种流体的流速并保持流速比,获得了四个不同的佩克莱数。用五步相移法对四组不同流速下的全息图进行处理,得到包裹相位图和相应二维的折射率分布,请参考图4(b)。在不同的流速下,折射率和相应的浓度分布请参考图4(a)。实验结果表明,当混合流体浓度差相同时,流速越大,浓度梯度越大。
[0073]
具体实施例二:
[0074]
我们也研究了不同驱动梯度下微通道内的扩散情况。将相同流速的氯化钙溶液和去离子水固定在50μm/l并泵入h形腔。选择4组不同浓度(0.6mol/l、1mol/l、1.4mol/l和1.8mol/l)的氯化钙溶液驱动扩散,并使用相同方法获得相应的包裹相位图和二维的折射率分布请参考图5(b)。图5(a)所示的扩散曲线定量地反映了不同驱动浓度下产生的扩散。实验结果表明,当流体流速一定时,混合流体的浓度差越大,浓度梯度越大。
[0075]
以上实验的检测结果,与nam
‑
trung nguyen等研究者对不同佩克莱数以及不同流速和浓度差的情况下,所得到的浓度分布结果十分吻合。证明该测量装置和方法能很好地用于以解析并定量研究微通道中的瞬态热流体动力学。
[0076]
上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1