用于光学测量的测量系统的制作方法
用于光学测量的测量系统
1.本发明涉及一种用于光学测量,尤其涉及用于测量距离和/或位置和/或速度和/或颜色的测量系统。
2.这里讨论的该类型的测量系统从实践中是充分已知的。一般来说,这里讨论的是光学计量学,它具有几乎无限的应用可能性。合适的测量系统从参考面无接触地确定测量对象的相应测得参数。用于确定测得参数的光传输轴的必要照明斑点(点、线、任何图案,诸如条纹光等)始终位于受公差影响的截锥(位置(x/y/z)和角度(α))中,该截锥明确分配给参考面。
3.关于根据本发明的教导的现有技术和优选设计示例,参考以下附图。结合基于附图对本发明优选设计示例的讨论,同样讨论了所要求保护的教导的一般优选配置和进一步发展。在图中,附图示出了:
4.图1以示意图示出了根据现有技术,使用点三角测量的示例,测量系统的实际传输轴与理想传输轴的偏差,
5.图2以示意图示出了也使用了点三角测量的示例,测量应用的目标区域连同照明斑点的位置偏差,
6.图3以示意图示出了根据本发明的外部机械参考坐标系与测量应用的坐标系的对准,
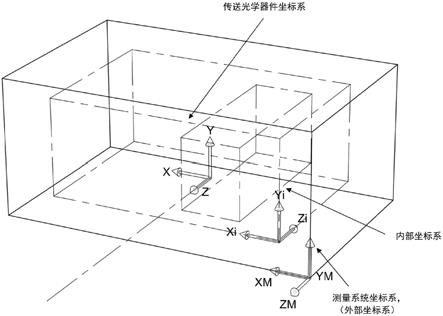
7.图4以示意图示出了外部和内部坐标系之间的关系连同传送光学器件,以及
8.图5以示意图示出了内部和外部坐标系的融合,特别是外壳部分和外壳的内部中的光机载体的融合。
9.关于现有技术,参考图1,其使用点三角测量的示例示出了真实传输轴与理想传输轴之间的偏差。图1具体示出了测量系统1和2以及测量面通过mba(测量范围的开始)、mbm(测量范围的中间)和mbe(测量范围的结束)的真实传输轴的偏差。该图示出了受公差影响的截锥,其显示在相应测量面中测量时的困难。测量对象上的测量所需的照明斑点位置随距离和/或用相同类型的传感器替代传感器时而变化,并且如图2中所示,使用点三角测量的示例,通常导致在测量期间离开测量应用所需的目标区域。图2示出了测量应用的目标区域和照明斑点的位置偏差。
10.到目前为止,现有技术中出现的问题只能针对每个测量系统个体地解决,即如下:
11.原则上,进入到目标区域内的光学对准是可能的,即借助于测量系统的机械和/或机电调整。测量系统始终移动、倾斜或旋转。这可能导致系统距离误差,即如果测量系统在与原始校准期间不同的设置下运行。
12.测量系统也可以在已知的坐标系中被校准,例如在坐标测量机中,根据该坐标系,通过校正相应测量系统的位置来命中或到达目标区域。例如,可以使用标准(例如使用球体)或借助于光学测量进行此类校准。
13.实践中已知的测量系统相对于上述问题是不利的,因为为了避免测量误差,始终需要执行耗时的校准/调整,特别是在原始装配期间的调整之外的校准/调整。特别是,如果存在即使非常轻微的错位,相应的传输光束会导致测量中出现问题,因为无法明确定义该
光束的出口点。
14.因此,本发明的基本目的是以如下方式优化用于光学测量的测量系统:使得用户无需进行额外的对准和/或调整和/或校准。
15.根据本发明的测量系统旨在仅在其外部机械参考坐标系上与测量应用的坐标系对准。其目的是以使得光轴和/或光学坐标系与外部机械参考坐标系具有明确关系的方式来构建测量系统。由于两个坐标系之间的这种明确关系,在大多数测量应用中,根据关于图1和图2的说明,受公差影响的截锥可被相当大地减小,至少至不需要额外对准和/或调整和/或校准的程度。图3示出了外部机械参考坐标系与测量应用的坐标系的对准。
16.本发明的基本目标通过权利要求1的特征实现。以下术语的定义对于更好地理解本发明是有利的:
17.1.外部机械参考坐标系是测量系统的坐标系。以下也被称为外部坐标系。
18.它是从外部定义传感器的坐标系,并且其(诸)参考点位于传感器的外壳上。它表示客户用于精确定位和对准传感器的坐标系。在简单配置的框架内,传感器上的螺钉点、紧固孔或紧固孔眼、参考边缘或参考表面被用于此目的。
19.2.传送光学器件坐标系为光学坐标系。这是最初定义光束的位置的虚拟坐标系。它主要取决于光机组件(与光源相关,例如激光器,与成像光学器件相关,例如透镜、镜子、晶格等,以及与机械相关,例如孔径、支架、连接元件等)。
20.3.接收光学器件坐标系最初同样是定义检测器的位置的虚拟坐标系。它主要取决于光机组件(与接收器相关,例如ccd线、ccd矩阵,与成像光学器件相关,例如透镜、镜子、晶格等,以及与机械相关,例如孔径、支架、连接元件等)。
21.4.内部坐标系是测量系统内部的用作光轴的参考的机械坐标系。
22.5.测量应用坐标系是客户的坐标系,测量应用的目标区域位于其中。
23.根据本发明的教导,用于光学测量,特别是用于测量距离和/或位置和/或速度和/或颜色的测量系统设置有至少一个外部固定点,该外部固定点定义外部坐标系或至少位于其中。还提供了至少一个内部固定点,其定义内部坐标系或至少位于其中。这两个坐标系相对彼此具有明确的位置,这意味着系统的调整或校准。因此,根据本发明的教导的关键要素是两个坐标系之间的明确分配。两个坐标系之间的这种明确关系使得前面讨论的受公差影响的截锥大大地被减小,至少以系统的额外对准和/或调整和/或校准是不必要的方式。在这方面,再次参考图3。
24.这两个坐标系尤其有利地相同或一致。
25.还可以设想,两个坐标系可以借助于平移和/或旋转和/或镜像相互转换。
26.内部坐标系定义光学组件和/或成像组件和/或图像记录组件的位置。
27.外部坐标系应被理解为机械参考坐标系,其必须与相应测量应用的坐标系对准。这两个坐标系相对彼此具有明确的位置。
28.图4示出了外部坐标系、内部坐标系和传送光学器件之间的关系。两个坐标系相对于彼此的明确位置是根据本发明的系统的基石。
29.成像组件包括作为传送光学器件的至少一个光机光源。图像记录组件包括至少一个作为接收光学器件的至少一个光机传感器元件。光机组件或传送光学器件相对于内部坐标系的位置可被设置为预定值。
30.所述外部和内部固定点被分配给优选的单片结构元件,单块。
31.如果测量系统是用于激光三角测量的系统,如果传送光学器件和接收光学器件被布置在根据固定点调整的单片结构元件上,则是有利的。因此,单片结构元件承载传送光学器件和接收光学器件,传送光学器件和接收光学器件以预定关系彼此对准或调整。
32.此外,还提供了将光机组件布置在外壳中,即测量系统的基本组件位于外壳中。在这种情况下,单片结构元件具有双重功能。一方面,单片结构元件作为光机组件的载体。另一方面,单片结构元件可以是外壳的一部分。这有利于坐标系彼此之间的明确位置,并简化测量系统的结构。
33.单片结构元件可以用金属精确铣削或铸造,如有必要,还可以返工。还可以构想,单片结构元件使用注射成型工艺由塑料制成,例如纤维增强塑料。单片结构元件也可以使用附加工艺生产,例如借助于3d打印。
34.外部坐标系以及因此传感器定位或设置可以使用机械手段对准。定位套筒、定心销、桥台边缘等适用于此目的。这些是用于定位的简单手段。
35.调整设备可被提供或用于将传送光学器件的坐标系参照到外部坐标系。这种调整设备为外部坐标系的设置提供照明斑点(x、y、z)的位置的绝对参考。
36.替换地,在测量照明斑点(x、y、z)在不同且绝对可定义的距离上的位置后,可以机械精确地再现传感器或外部坐标系的设置。
37.图5示意性地示出了两个坐标系,即内部和外部坐标系的融合。这实际上是外壳部分和外壳的内部的光机载体的融合。在这种情况下,关键因素是传感器设置或外部坐标系可以以绝对精度再现。这是例如使用定位套筒、定心销、桥台边缘等实现的。
38.根据本发明的先前讨论的测量系统具有巨大的优势,即在大多数应用中,它不需要任何安装位置调整。这减少了所需的维护量并使系统用户友好。
39.关于根据本发明的教导的进一步有利配置,参考说明书的一般部分和所附权利要求,以便避免重复。
40.最后,必须明确地注意,根据本发明的上述教导的设计示例仅用于解释所要求的教导,而不将所述教导限制于这些设计示例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1