车辆故障诊断装置的制作方法
1.此处所公开的技术涉及与车辆故障诊断装置相关的技术领域。
背景技术:
2.最近,车辆的电子化不断发展,通过向发动机、自动变速器、制动器等输出控制信号来实施对各车载设备的控制。在这种已电子化的车辆中,控制信号的通信网的故障、车载设备自身的故障也是利用电信号来检测的(例如,专利文献1)。
3.例如,在专利文献1中公开了如下构成的车辆用通信系统:事先在与各种ecu的所有通信线连接起来的管理员ecu中存储路由表,所述路由表记录了直至各种ecu接收到重要数据为止的传送路径,使用该路由表,根据在各通信线中传输的数据来检测所述传送路径的异常。
4.专利文献1:日本专利第3912218号公报
技术实现要素:
5.-发明要解决的技术问题-
6.不过,现有车辆的故障诊断是事先对每个传感器和每个车载设备赋予表示故障的故障代码,由经销商等认定车辆故障的作业人员分别读取各故障代码来掌握车辆的故障部位。然而,当有多个传感器、多个车载设备与被视为车辆故障的现象相关时,则存在难以明确掌握该现象的最终原因的问题。
7.例如,针对不产生车轮扭矩这一现象,发动机、变速器、制动装置等都会产生影响,但仅靠单个故障代码难以掌握是哪个车载设备发生了故障,从而难以找到现象的原因。
8.此处所公开的技术是鉴于上述问题而完成的,其目的在于:当车辆出现了被视为故障的现象时,容易掌握出现该现象的原因。
9.-用以解决技术问题的技术方案-
10.为了解决上述技术问题,此处所公开的技术以一种车辆故障诊断装置为对象,其包括运算装置,该运算装置进行用于控制安装于车辆上的车载设备的运算,所述车辆故障诊断装置包括多个传感器、目标运动设定部、设备控制部以及设备故障诊断部,多个所述传感器向所述运算装置输入包括所述车辆的外部环境在内的车辆信息,所述目标运动设定部设置在所述运算装置中,并基于由各所述传感器输入的信息来设定所述车辆的目标运动,所述设备控制部设置在所述运算装置中,并基于由所述目标运动设定部设定的目标运动,分别向各所述车载设备输出控制信号,所述设备故障诊断部设置在所述运算装置的通信路径中的位于所述设备控制部与各所述车载设备之间的部分,并诊断各所述车载设备的故障,所述设备故障诊断部具有针对所述车辆的每个功能确定出与各功能相关的所述车载设备的设备诊断表,并且基于各所述车载设备的输出和所述设备诊断表来诊断各所述车载设备的故障。
11.根据该构成方式,设备故障诊断部由于设置在运算装置的通信路径中的位于设备
控制部与各车载设备之间的部分,因而会接收来自控制各车载设备的各设备控制部的输出。因此,设备故障诊断部能够在考虑到各车载设备的相关性的情况下来诊断各车载设备的故障。而且,设备故障诊断部具有针对车辆的每个功能确定出与各功能相关的车载设备的设备诊断表,因此当车辆出现了被视为故障的现象时,能够掌握与该现象相关的各车载设备的状态。因此,针对被视为车辆故障的现象,能够容易掌握出现该现象的原因。
12.在所述车辆故障诊断装置中,也可以是这样的构成,所述目标运动设定部具有路径决定部和车辆运动决定部,所述路径决定部基于各所述传感器的输出,来决定所述车辆应行驶的行驶路径,所述车辆运动决定部决定所述车辆的用于按照由所述路径决定部计算出的行驶路径行驶的运动,所述设备故障诊断部在进一步考虑由所述路径决定部决定的所述行驶路径和由所述车辆运动决定部决定的所述车辆的运动的情况下,诊断各所述车载设备的故障。
13.例如,针对“发动机旋转但不前进”这一现象,会考虑行驶路径的路面状态(例如,路面冻结)、该路面状态下的车辆运动,从而即使出现了所述现象,设备故障诊断部也能够判断出不是车载设备的故障而是路面状态的问题。由此,针对被视为车辆故障的现象,能够更加容易掌握出现该现象的原因。
14.在所述车辆故障诊断装置中,也可以是这样的构成,还包括传感器故障诊断部,所述传感器故障诊断部设置在所述运算装置的通信路径中的位于各所述传感器与所述目标运动设定部之间的部分,并诊断各所述传感器的故障,所述传感器故障诊断部具有针对所述车辆的每个功能确定出与各功能相关的所述传感器的传感器诊断表,并且基于所述传感器诊断表来诊断各所述传感器的故障。
15.根据该构成方式,当车辆出现了被视为故障的现象时,即使在出现故障的不是车载设备而是传感器的情况下,也容易确定出现该现象的原因。由此,针对被视为车辆故障的现象,能够容易掌握出现该现象的原因。
16.在具备传感器故障诊断部的车辆故障诊断装置中,也可以是这样的构成,还包括存储部,所述存储部针对所述车辆的每个功能将所述设备故障诊断部的诊断结果和所述传感器故障诊断部的诊断结果相关联地存储起来。
17.根据该构成方式,能够在掌握与车辆的功能相关的车载设备与传感器的组合的基础上,来诊断车辆的故障。由此,针对被视为车辆故障的现象而言,能够容易掌握该现象的原因。
18.在包括存储部的车辆故障诊断装置中,也可以是这样的构成,所述目标运动设定部具有路径决定部和车辆运动决定部,所述路径决定部基于各所述传感器的输出来决定所述车辆应行驶的行驶路径,所述车辆运动决定部决定所述车辆的用于按照由所述路径决定部计算出的行驶路径行驶的运动,所述存储部进一步将所述设备故障诊断部的诊断结果、所述传感器故障诊断部的诊断结果、由所述路径决定部决定的所述行驶路径及由所述车辆运动决定部决定的所述车辆的运动之间建立关联地存储起来。
19.根据该构成方式,在车辆故障诊断中,还考虑车辆的行驶路径和目标运动。由此,例如,针对“发动机旋转但不前进”这一现象,会考虑行驶路径的路面状态(例如,路面冻结)、该路面状态下的车辆运动,从而能够掌握不是车载设备和传感器的故障而是路面状态的问题。由此,针对被视为车辆故障的现象,能够更加容易地掌握该现象的原因。
20.-发明的效果-
21.如上所述,根据此处所公开的技术,当车辆出现了被视为故障的现象时,能够容易掌握该现象的原因。
附图说明
22.图1是示出车辆的示意图,该车辆安装有包括示例性实施方式所涉及的故障诊断装置的运算装置;
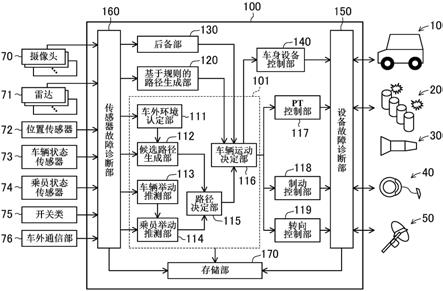
23.图2是示出包括故障诊断装置的运算装置的示意图;
24.图3是示出存储于设备故障诊断部中的设备诊断表之一例的图;
25.图4是示出存储于传感器故障诊断部中的传感器诊断表之一例的图。
具体实施方式
26.下面,参照附图对示例性实施方式进行详细的说明。
27.图1示意性地示出安装有本第一实施方式所涉及的运算装置100的车辆。该运算装置100具有下述功能,即:为了能够实现所述车辆的辅助驾驶和自动驾驶,计算所述车辆应行驶的路径,并且决定所述车辆的用于按照该路径行驶的运动。
28.运算装置100是具有一个或多个芯片的计算机硬件,具体而言,其包括具有cpu的处理器、储存有多个模块的存储器等。
29.图2示意性地示出安装于车辆上的运算装置100的结构。此处示出了运算装置100的构成中用于发挥本实施方式所涉及的功能(后述的路径生成功能)的结构,并没有示出运算装置100所具有的全部功能。
30.如图2所示,运算装置100基于从输入包括车辆的外部环境在内的车辆信息的多个传感器等所输入的信息,决定车辆的目标运动,并控制设备的工作。向运算装置100输出信息的传感器等包括多个摄像头70、多个雷达71、位置传感器72、车辆状态传感器73、乘员状态传感器74、开关类75以及车外通信部76,多个所述摄像头70设置于所述车辆的车身等且拍摄车外环境,多个所述雷达71设置于车辆的车身等且检测车外的目标对象等,所述位置传感器72利用全球定位系统(global positioning system:gps)检测车辆的位置(车辆位置信息),所述车辆状态传感器73从由车速传感器、加速度传感器、横摆角速度传感器等检测车辆举动的传感器类的输出获取车辆的状态,所述乘员状态传感器74由车内摄像头等构成且获取车辆上的乘员的状态,所述开关类75用于使前照灯、空调工作,所述车外通信部76接收来自位于本车辆周围的其他车辆的通信信息、来自导航系统的交通信息后,向运算装置100输入。
31.各摄像头70分别布置成能够在水平方向上对车辆的周围进行360
°
拍摄。各摄像头70拍摄示出车外环境的光学图像,并生成图像数据。各摄像头70将所生成的图像数据输出至运算装置100。
32.由各摄像头70获取的图像数据除了被输入到运算装置100以外,还被输入hmi(human machine interface:人机界面)单元(省略图示)。该hmi单元将基于所获取的图像数据的信息显示在车内的显示装置等上。
33.与摄像头70相同,各雷达71分别布置成其检测范围在水平方向上覆盖住车辆周围
的360
°
范围。雷达71的种类并没有被特别加以限定,例如,能够采用毫米波雷达、红外线雷达。
34.运算装置100具有目标运动设定部101,所述目标运动设定部101在辅助驾驶时或自动驾驶时,基于从各传感器70~76输入的信息,设定车辆的行驶路径,并设定车辆的目标运动,以使车辆按照该行驶路径行驶。为了设定车辆的目标运动,目标运动设定部101具有车外环境认定部111、候选路径生成部112、车辆举动推测部113、乘员举动推测部114、路径决定部115以及车辆运动决定部116,所述车外环境认定部111基于来自摄像头70等的输出来认定车外环境,所述候选路径生成部112根据由车外环境认定部111认定的车外环境,计算车辆1能够行驶的一条或多条候选路径,所述车辆举动推测部113基于来自车辆状态传感器73的输出,推测车辆举动,所述乘员举动推测部114基于来自乘员状态传感器74的输出,推测车辆上的乘员的举动,所述路径决定部115决定车辆1应行驶的路径,所述车辆运动决定部116决定车辆的用于按照由路径决定部115设定的路径行驶的目标运动。
35.运算装置100具有对用于实现由车辆运动决定部116决定的目标运动的所述车载设备的控制量(例如,发动机20的燃料喷射量、制动器40的执行器的工作量)进行计算的、动力总成控制部(以下称为pt控制部)117、制动控制部118和转向控制部119。另外,运算装置100具有控制车身相关设备(适当地称为车身相关设备10)的车身设备控制部140。
36.另外,作为安全功能,运算装置100具有基于规则的路径生成部120和后备部130,所述基于规则的路径生成部120按照规定的规则认定车外的对象物,生成避开该对象物的行驶路径,所述后备部130生成用于将车辆1引导至路肩等安全区域的行驶路径。
37.另外,在本实施方式中,运算装置100具有对车辆进行故障诊断的故障诊断功能。具体而言,运算装置100包括设备故障诊断部150、传感器故障诊断部160以及存储部170,所述设备故障诊断部150设置在该运算装置100的通信路径中的位于设备控制部117~119、140与各车载设备之间的部分,并诊断各车载设备的故障,所述传感器故障诊断部160设置在该运算装置100的通信路径中的位于各传感器70~76与车外环境认定部111等目标运动设定部之间的部分,并诊断各传感器70~76的故障,所述存储部170针对车辆的每个功能将设备故障诊断部150的诊断结果和传感器故障诊断部160的诊断结果相关联地存储起来。
38.车外环境认定部111、候选路径生成部112、车辆举动推测部113、乘员举动推测部114、路径决定部115、车辆运动决定部116、pt控制部117、制动控制部118、转向控制部119、基于规则的路径生成部120、后备部130、设备故障诊断部150、传感器故障诊断部160和存储部170是储存在存储器102中的模块之一例。
39.〈车外环境认定部〉
40.车外环境认定部111接收安装于车辆上的摄像头70、雷达71等的输出,来认定车外环境。所认定的车外环境至少包括道路和障碍物。此处,车外环境认定部111根据摄像头70、雷达71的数据,将车辆周围的三维信息与车外环境模型进行对照,由此推测包括道路和障碍物在内的车外环境。车外环境模型是例如通过深度学习而生成的学习完毕模型,能够识别车辆周围的三维信息中的道路、障碍物等。
41.例如,车外环境认定部111从摄像头70拍摄到的图像,通过图像处理,确定自由空间即不存在物体的区域。此处的图像处理使用例如通过深度学习而生成的学习完毕模型。而且生成表示自由空间的二维地图。另外,车外环境认定部111从雷达71的输出中获取存在
于车辆1周边的目标对象的信息。该信息是包括目标对象的位置、速度等的定位信息。而且,车外环境认定部111将所生成的二维地图与目标对象的定位信息结合起来,生成表示车辆周围的三维地图。此处,使用了摄像头70的设置位置和拍摄方向的信息、雷达71的设置位置和发送方向的信息。车外环境认定部111通过对比所生成的三维地图和车外环境模型,来推测包括道路和障碍物在内的车外环境。需要说明的是,在深度学习中使用了多层神经网络(dnn:deep neural network:深度神经网络)。作为多层神经网络,例如有cnn(convolutional neural network:卷积神经网络)。
42.〈候选路径生成部〉
43.候选路径生成部112基于车外环境认定部111的输出、位置传感器72的输出和从车外通信部76发送的信息等,生成车辆能够行驶的候选路径。例如,候选路径生成部112生成在由车外环境认定部111认定的道路上,避开由车外环境认定部111认定的障碍物的行驶路径。车外环境认定部111的输出例如包括与供车辆行驶的行驶道路相关的行驶道路信息。行驶道路信息包括与行驶道路本身的形状相关的信息、与行驶道路上的对象物相关的信息。与行驶道路形状相关的信息中包括行驶道路的形状(直线、曲线、曲线曲率)、行驶道路宽度、车道数、各车道宽度等。与对象物相关的信息中包括对象物相对于本车辆的相对位置和相对速度、对象物的属性(种类、移动方向)等。作为对象物的种类,例如有其他车辆、行人、道路、标志线等。
44.此处,候选路径生成部112使用状态栅格法计算多条候选路径,并从多条候选路径中基于各条候选路径的路径成本选择一条或多条候选路径。不过,也可以使用其他方法来计算路径。
45.候选路径生成部112基于行驶道路信息在行驶道路上设定虚拟的网格区域。该网格区域具有多个网格点。利用各网格点确定在行驶道路上的位置。候选路径生成部112将规定的网格点设定在目标到达位置上。而且,通过使用网格区域内的多个网格点的路径搜索来对多条候选路径进行运算。在状态栅格法中,路径从某个网格点向车辆的行进方向前方的任意网格点产生分支。因此,各候选路径被设定为依次通过多个网格点。各候选路径也包括表示通过各网格点的时间的时间信息、与在各网格点处的速度、加速度等相关的速度信息、其他与车辆运动相关的信息等。
46.候选路径生成部112从多条候选路径中基于路径成本选择一条或多条行驶路径。此处的路径成本例如有车道居中的程度、车辆的加速度、转向角度、碰撞的可能性等。需要说明的是,当候选路径生成部112选择多条行驶路径时,路径决定部115选择一条行驶路径。
47.〈车辆举动推测部〉
48.车辆举动推测部113根据车速传感器、加速度传感器、横摆角速度传感器、检测车轮扭矩等车辆举动的传感器类的输出,检测车辆的状态。车辆举动推测部113使用示出车辆举动的车辆六自由度模型。
49.此处,车辆六自由度模型指的是将行驶中的车辆的“前后”、“左右”、“上下”这三个轴向上的加速度和“俯仰”、“侧倾”、“横摆”这三个轴向上的角速度实现模型化而成的模型。即,不是仅在传统的车辆运动工程学的平面上(仅车辆的前后左右(x-y移动)和横摆运动(z轴))捕捉车辆的运动,而是使用经由悬架架设于四个车轮的车身的俯仰(y轴)和侧倾(x轴)运动以及z轴的移动(车身的上下运动)合计六个轴来再现车辆举动的数值模型。
50.车辆举动推测部113将车辆六自由度模型应用于由候选路径生成部112生成的行驶路径,并推测在按照该行驶路径行驶时的车辆举动。
51.〈乘员举动推测部〉
52.乘员举动推测部114根据乘员状态传感器74的检测结果,特别推测驾驶员的健康状态和情绪。作为健康状态,例如有健康、轻微疲劳、身体状况不佳、意识低下等。情绪例如有:开心、正常、无聊、烦躁、不快等。
53.例如,乘员举动推测部114例如从由设置于车室内的摄像头拍摄到的图像中提取驾驶员的面部图像,来确定驾驶员。所提取出的面部图像和所确定的驾驶员的信息作为输入被供向人类模型。人类模型是例如通过深度学习而生成的学习完毕模型,关于有可能成为该车辆的驾驶员的每个人,根据其面部图像,输出健康状态和情绪。乘员举动推测部114输出已由人类模型输出了的驾驶员的健康状态和情绪。
54.另外,当使用皮肤温度传感器、心律传感器、血流量传感器、汗液传感器等生物体信息传感器作为用于获取驾驶员信息的乘员状态传感器74时,乘员举动推测部114根据生物体信息传感器的输出,检测驾驶员的生物体信息。在该情况下,人类模型关于可能成为该车辆的驾驶员的每个人,输入其生物体信息,输出健康状态和情绪。乘员举动推测部114输出已由人类模型输出了的驾驶员的健康状态和情绪。
55.另外,也可以使用就可能成为该车辆的驾驶员的每个人而言推测人针对车辆举动所具有的情绪的模型以作为人类模型。此时,只要按照时间序列对车辆举动推测部113的输出、驾驶员的生物体信息、推测出的情绪状态进行管理,并构建模型即可。采用该模型,例如能够预测驾驶员情绪的高涨程度(苏醒程度)与车辆举动之间的关系。
56.另外,乘员举动推测部114也可以包括人体模型以作为人类模型。人体模型例如确定了头部质量(例如,5kg)和支承前后左右g的颈周肌肉力量等。当输入车身的运动(加速度g、加加速度)时,人体模型输出所预料的乘员的身体状况和主观状况。作为乘员的身体状况,例如为舒适/适度/不快,作为主观状况,例如为意外/能够预测等。由于例如即使稍微使头部向后仰那样的车身举动都会给乘员带来不快,因此通过参照人体模型,能够避免选择该行驶路径。另一方面,就使头部像行礼那样向前移动的车身举动而言,乘员容易采取抵抗该举动的姿势,不会立即引发不快,因此能够选择该行驶路径。或者,通过参照人体模型,能够动态地决定目标运动,从而例如避免乘员的头部摇摆、或者使头部保持活动状态。
57.乘员举动推测部114将人类模型应用于由车辆举动推测部113推测出的车辆举动中,从而推测现在的驾驶员针对车辆举动所产生的健康状态的变化、情绪的变化。
58.〈路径决定部〉
59.路径决定部115基于乘员举动推测部114的输出,决定车辆应行驶的路径。当候选路径生成部112所生成的路径为一条时,路径决定部115将该路径作为车辆应行驶的路径。当候选路径生成部112所生成的路径有多条时,考虑乘员举动推测部114的输出,选择例如多条候选路径中乘员(特别是驾驶员)感觉最舒适的路径,即,选择使驾驶员不具有为了回避障碍物而过度慎重等的冗长感的路径。
60.〈基于规则的路径生成部〉
61.基于规则的路径生成部120根据来自摄像头70和雷达71的输出,在不利用深度学习的情况下,按照规定的规则认定车外的对象物,生成避开该对象物的行驶路径。基于规则
的路径生成部120也与候选路径生成部112相同,使用状态栅格法计算多条候选路径,从所述多条候选路径中基于各候选路径的路径成本,选择一条或多条候选路径。基于规则的路径生成部120例如基于不进入对象物的周围数m以内的规则,计算路径成本。该基于规则的路径生成部120也可以使用其他方法对路径进行计算。
62.基于规则的路径生成部120所生成的路径信息被输入车辆运动决定部116。
63.〈后备部〉
64.后备部130基于来自摄像头70和雷达71的输出,在传感器等发生故障时或乘员的身体状况不佳时,生成用于将车辆引导至路肩等安全区域的行驶路径。后备部130例如根据位置传感器72的信息设定能够使车辆紧急停止的安全区域,并生成到达该安全区域的行驶路径。后备部130也与候选路径生成部112相同,使用状态栅格法来计算多条候选路径,从多条所述候选路径中基于各候选路径的路径成本,选择一条或多条候选路径。该后备部130也可以使用其他方法对路径进行计算。
65.后备部130所生成的路径的信息被输入车辆运动决定部116。
66.《车辆运动决定部》
67.车辆运动决定部116针对路径决定部115所决定的行驶路径决定目标运动。所谓目标运动,是指如按照行驶路径行驶的转向及加减速。车辆运动决定部116参照车辆六自由度模型,针对路径决定部115选择出的行驶路径来计算车身运动。
68.车辆运动决定部116决定用于按照由基于规则的路径生成部120生成的行驶路径行驶的目标运动。
69.车辆运动决定部116决定用于按照由后备部130生成的行驶路径行驶的目标运动。
70.车辆运动决定部116在路径决定部115所决定的行驶路径与基于规则的路径生成部120所生成的行驶路径相比产生较大的偏离时,选择基于规则的路径生成部120所生成的行驶路径作为车辆应行驶的路径。
71.在推测出传感器等(特别是摄像头70、雷达71)发生故障时或乘员的身体状况不佳时,车辆运动决定部116就选择后备部130所生成的行驶路径作为车辆应行驶的路径。
72.〈设备控制部〉
73.设备控制部由pt控制部117、制动控制部118、转向控制部119和车身设备控制部140构成。
74.pt控制部117计算发动机20和变速器30的控制量,向发动机20和变速器30输出控制信号。具体而言,pt控制部117基于车辆运动决定部116的输出,设定发动机20的喷射器的燃料喷射量、燃料喷射时刻、发动机20的火花塞的点火时刻等,并根据该设定,生成控制发动机20的控制信号。pt控制部117将所生成的控制信号输出至发动机20的喷射器、节气门等。另外,pt控制部117基于车辆运动决定部116的输出,设定变速器30的齿轮级,并根据该设定,输出控制变速器30的控制信号。pt控制部117向变速器30输出所生成的控制信号。制动控制部118基于车辆运动决定部116的输出,设定制动装置40的制动执行器的动作,并根据该设定,生成控制制动执行器的控制信号。制动控制部118向制动装置40输出所生成的控制信号。转向控制部119基于车辆运动决定部116的输出,设定转向装置50的电动助力转向的动作,并根据该设定,生成控制电动助力转向的控制信号。转向控制部119向转向装置50输出所生成的控制信号。车身设备控制部140基于车辆运动决定部116的输出,设定灯、车门
等车辆的车身相关设备10的动作,并根据该设定,生成控制车身相关设备10的控制信号。所生成的控制信号被发送至各车身相关设备10。
75.需要说明的是,此处示出的车载设备10~50为一例,只要是安装在车辆上的装置,就包括在车载设备中。另外,例如,有时像发动机20那样包括喷射器、节气门等多个车载设备。
76.〈设备故障诊断部〉
77.如图2所示,设备故障诊断部150设置在运算装置100的通信路径中的位于设备控制部117~119、140与各车载设备10~50之间的部分。因此,从各设备控制部117~119、140向各车载设备输出的各控制信号全部被输入设备故障诊断部150。
78.设备故障诊断部150具有图3所示的设备诊断表151。该设备诊断表151针对车辆的每个功能,确定出与各功能相关的车载设备。例如,图3所示的设备诊断表151确定出与发动机20的旋转(曲轴的旋转)相关的车载设备。需要说明的是,图3中示出的车载设备为一例,并非示出与发动机20的旋转相关的全部车载设备。
79.设备故障诊断部150基于设备控制部117~119、140所输出的各控制信号与实际的各车载设备的输出值,诊断各车载设备10~50的故障状态。如图2所示,设备控制部117~119、140所输出的控制信号被输入设备故障诊断部150。设备故障诊断部150存储该控制信号的内容,特别是存储各车载设备的输出(执行器的工作时间等)的期望值。此时,设备故障诊断部150基于设备诊断表151,分别存储与所执行的控制内容相关的车载设备的期望值。而且,设备故障诊断部150获取车载设备的实际输出后,与所存储的期望值进行比较。设备故障诊断部150在车载设备的实际输出与所存储的期望值之间的偏差为规定量以上时,判断为车载设备有异常(发生故障)。
80.例如,在使发动机20旋转时,设备故障诊断部150根据来自pt控制部117的输入,存储喷射器的工作时间、火花塞的点火时刻和节气门的开度等。而且,将各车载设备的期望值与各车载设备的实际输出进行比较,来确定存在异常的车载设备。
81.在设备诊断表151中,对正常的车载设备与异常的车载设备的每个组合,赋予了设备故障代码(在图3中仅示为代码)。设备故障诊断部150根据诊断结果确定设备故障代码,将该设备故障代码输出至存储部170。
82.〈传感器故障诊断部〉
83.如图2所示,传感器故障诊断部160设置在运算装置100的通信路径中的位于各传感器70~76与目标运动设定部101之间的部分。因此,传感器故障诊断部160能够接收从向目标运动设定部101发送检测信号的各传感器70~76输出的全部信号。
84.传感器故障诊断部160具有图4所示的传感器诊断表161。该传感器诊断表161针对车辆的每个功能,确定出与各功能相关的传感器。例如,图4所示的传感器诊断表161确定出与发动机20的旋转相关的传感器。需要说明的是,图4所示的传感器为一例,并非示出与发动机20的旋转相关的全部传感器。
85.传感器故障诊断部160基于从各传感器70~76输入的信号,诊断各传感器70~76的故障状态。具体而言,各传感器70~76分别具有自检功能,各传感器70~76将通过该自检功能得到的检查结果与测定值一起输入传感器故障诊断部160。传感器故障诊断部160基于所输入的检查结果,诊断各传感器70~76的故障状态。另外,传感器故障诊断部160构成为
能够向各传感器70~76输出指示实施自检的控制信号。
86.在传感器诊断表161中,对正常的传感器和异常的(发生故障的)传感器的每个组合,赋予传感器故障代码(图4中仅示为代码)。传感器故障诊断部160根据诊断结果确定传感器故障代码,将该传感器故障代码输出至存储部170。
87.〈存储部〉
88.存储部170针对车辆的每个功能将设备故障诊断部150的诊断结果和传感器故障诊断部160的诊断结果相关联地存储起来。具体而言,针对车辆的每个功能和每个时间,将从设备故障诊断部150输出的设备故障代码和从传感器故障诊断部160输出的传感器故障代码相关联地存储起来。
89.例如,能够事先将表存储在存储部170中,该表是针对每个功能将设备故障代码和传感器故障代码组合起来而成的。由此,存储部170能够基于该表将设备故障代码和传感器故障代码之间建立关联。另外,能够使存储部170具有对设备故障代码和传感器故障代码赋予时间戳的功能。由此,存储部170能够在时间上将同时或者在较近时间输入的设备故障代码与传感器故障代码相关联地存储起来。需要说明的是,也可以使设备故障诊断部150和传感器故障诊断部160分别具有对设备故障代码和传感器故障代码赋予时间戳的功能。
90.由此,当车辆出现了被视为故障的现象时,容易确定该现象的原因。例如,假设出现了“虽然踩下加速踏板但发动机转速不上升”这一现象。假设在出现该现象的时期,从设备故障诊断部150输出表示节气门故障的设备故障代码(图3的代码d1),而从传感器故障诊断部160没有输出表示油门开度传感器故障的传感器故障代码(图4的代码a2、a3)。由此,经销商等认定车辆故障的作业人员只要读取存储于存储部170中的各代码,就能掌握“虽然踩下加速踏板但发动机转速不上升”这一现象的原因在于“因节气门故障致使发动机转速没有上升”。
91.此外,例如假设出现了“门上锁但车门打开”这一现象。此时,假设在出现该现象的时期,从设备故障诊断部150没有输出表示门锁的执行器故障的设备故障代码,而从传感器故障诊断部160输出了表示车门开关故障的传感器故障代码。由此,经销商等认定车辆故障的作业人员就能够掌握“门上锁但车门打开”这一现象的原因在于“因车门开关故障使得门锁的执行器没有工作”。
92.此处,在本实施方式中,存储部170构成为:进一步将设备故障诊断部150的诊断结果、传感器故障诊断部160的诊断结果、以及由目标运动设定部101设定的车辆的目标运动建立关联地存储起来。更具体而言,存储部170进一步将设备故障诊断部150的诊断结果、传感器故障诊断部160的诊断结果、由路径决定部115决定的行驶路径及由车辆运动决定部116决定的车辆的运动之间建立关联地存储起来。
93.例如,假设出现了“虽然操作了转向装置50但没有产生横摆加速度”这一现象。假设在出现该现象的时期,没有输入来自设备故障诊断部150的表示相关车载设备(转向装置50等)故障的设备故障代码、和来自传感器故障诊断部160的表示相关传感器(转向角传感器等)故障的传感器故障代码。另一方面,假设从目标运动设定部101向存储部170输出行驶路径中存在冻结路面这一信息。由此,经销商等认定车辆故障的作业人员就能够掌握“虽然操作了转向装置50但没有产生横摆加速度”这一现象的原因在于“并不是车载设备和传感器故障,而是因为在冻结路面上行驶”之故。这样一来,所述作业人员容易识别出车辆没有
发生故障,并且能够容易识别出产生被视为车辆故障的现象的原因。
94.因此,在本实施方式中,包括多个传感器70~76、目标运动设定部101、设备控制部117~119、140以及设备故障诊断部150,多个所述传感器70~76向运算装置100输入包括车辆的外部环境在内的车辆信息,所述目标运动设定部101设置在运算装置100中,并基于由各传感器70~76输入的信息,设定车辆的目标运动,所述设备控制部117~119、140设置在运算装置100中,并基于由目标运动设定部101设定的目标运动,向各车载设备10~50分别输出控制信号,所述设备故障诊断部150设置在运算装置100的通信路径中的位于设备控制部117~119、140与各车载设备10~50之间的部分,并诊断各车载设备10~50的故障,设备故障诊断部150具有针对车辆的每个功能确定出与各功能相关的车载设备10~50的设备诊断表151,并且基于各车载设备10~50的输出和设备诊断表(例如,图3的设备诊断表151),来诊断车载设备10~50的故障。即,设备故障诊断部150因为接收来自控制各车载设备的各设备控制部117~119、140的输出,所以能够在考虑各车载设备的相关性的情况下诊断各车载设备的故障。而且,设备故障诊断部150具有针对车辆的每个功能确定出与各功能相关的车载设备的设备诊断表,因此能够在车辆出现了被视为故障的现象时,掌握与该现象相关的车载设备的状态。因此,针对被视为车辆故障的现象,能够容易掌握该现象的原因。
95.另外,在本实施方式中,还包括传感器故障诊断部160,所述传感器故障诊断部160设置在运算装置100的通信路径中的位于各传感器70~76与目标运动设定部101之间的部分,并诊断各传感器70~76的故障,传感器故障诊断部160具有针对车辆的每个功能确定出与各功能相关的传感器70~76的传感器诊断表(例如,图4的传感器诊断表161),并且基于传感器诊断表来诊断各传感器70~76的故障。由此,当车辆出现了被视为故障的现象时,即使在产生故障的不是车载设备而是传感器的情况下,也容易确定该现象的原因。其结果是,针对被视为车辆故障的现象,能够容易掌握该现象的原因。
96.另外,在本实施方式中,还包括存储部170,所述存储部170针对车辆的每个功能将设备故障诊断部150的诊断结果和传感器故障诊断部160的诊断结果相关联地存储起来。由此,能够在掌握与车辆的功能相关的车载设备与传感器的组合的基础上,诊断车辆故障。其结果是,针对被视为车辆故障的现象,能够容易掌握该现象的原因。
97.特别是,在本实施方式中,存储部170进一步将设备故障诊断部150的诊断结果、传感器故障诊断部160的诊断结果、由路径决定部115决定的车辆的行驶路径及由车辆运动决定部116决定的车辆的运动之间建立关联地存储起来。由此,因为考虑了行驶路径的路面状态(例如,路面冻结)、该路面状态下车辆的运动,所以能够掌握不是车载设备和传感器出现故障而是路面状态的问题。由此,针对被视为车辆故障的现象,能够更加容易掌握该现象的原因。
98.此处所公开的技术并不限于上述实施方式,在不脱离权利要求书的主旨的范围内能够进行替换。
99.例如,也可以是这样的,即:设备故障诊断部150在进一步考虑由路径决定部115决定的车辆的行驶路径和由车辆运动决定部116决定的车辆运动的情况下,诊断各车载设备的故障。此时,例如,只要事先在设备诊断表中追加表示路面状态(有无冻结、凹凸情况等)、车辆运动(转弯等)的项目,针对每个路面状态、车辆的每个运动赋予设备故障代码即可。
100.另外,在上述实施方式中,设置有存储部170,但并不局限于此,也可以省略存储部
170。此时,例如,可以是这样的:事先使设备故障诊断部150和传感器故障诊断部160分别具有存储设备故障代码和传感器故障代码的功能,经销商等分别从各故障诊断部150、160读取各故障代码。
101.另外,在上述实施方式中,利用运算装置100的目标运动设定部101,能够进行自动驾驶或辅助驾驶。并不局限于此,目标运动设定部101只要基于由各传感器70~76输入的信息来设定车辆的目标运动,则运算装置100也可以不具有自动驾驶功能或辅助驾驶功能。
102.上述实施方式仅为示例而已,不得对本公开的范围做出限定性解释。本公开的保护范围由权利要求书定义,属于权利要求书的等同范围的变形、变更都包括在本公开的范围内。
103.-产业实用性-
104.此处所公开的技术作为车辆故障诊断装置是有用的,其中,该车辆故障诊断装置包括运算装置,该运算装置进行用于控制安装于车辆上的车载设备的运算。
105.-符号说明-
106.10
ꢀꢀꢀꢀꢀ
车身相关设备
107.20
ꢀꢀꢀꢀꢀ
发动机
108.30
ꢀꢀꢀꢀꢀ
变速器
109.40
ꢀꢀꢀꢀꢀ
制动装置
110.50
ꢀꢀꢀꢀꢀ
转向装置
111.70
ꢀꢀꢀꢀꢀ
摄像头(传感器)
112.71
ꢀꢀꢀꢀꢀ
雷达(传感器)
113.72
ꢀꢀꢀꢀꢀ
位置传感器
114.73
ꢀꢀꢀꢀꢀ
车辆状态传感器
115.74
ꢀꢀꢀꢀꢀ
乘员状态传感器
116.75
ꢀꢀꢀꢀꢀ
开关类(传感器)
117.76
ꢀꢀꢀꢀꢀ
车外通信部(传感器)
118.100
ꢀꢀꢀꢀ
运算装置
119.101
ꢀꢀꢀꢀ
目标运动设定部
120.115
ꢀꢀꢀꢀ
路径决定部
121.116
ꢀꢀꢀꢀ
车辆运动决定部
122.117
ꢀꢀꢀꢀ
pt控制部
123.118
ꢀꢀꢀꢀ
制动控制部
124.119
ꢀꢀꢀꢀ
转向控制部
125.140
ꢀꢀꢀꢀ
车身设备控制部
126.150
ꢀꢀꢀꢀ
设备故障诊断部
127.151
ꢀꢀꢀꢀ
设备诊断表
128.160
ꢀꢀꢀꢀ
传感器故障诊断部
129.161
ꢀꢀꢀꢀ
传感器诊断表
130.170
ꢀꢀꢀꢀ
存储部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1