电子设备、电子设备的控制方法以及程序与流程
电子设备、电子设备的控制方法以及程序
1.相关申请的相互参照
2.本技术主张2019年7月29日在日本进行专利申请的日本特愿2019-139184的优先权,在此引入该在先申请的所有公开内容作为参照。
技术领域
3.本发明涉及电子设备、电子设备的控制方法以及程序。
背景技术:
4.例如在与汽车相关的产业等领域中,测定本车辆与规定的物体之间的距离等技术受到重视。尤其是,近年来正在进行通过发送毫米波这样的电波,接收被障碍物等的物体反射的反射波,来测定与物体之间的距离等的雷达(radar(radio detecting and ranging))技术的各种研究。随着辅助驾驶员的驾驶的技术以及与使驾驶的一部分或者全部自动化的自动驾驶相关联的技术的发展,预计这种测定距离等的技术的重要性在今后日益提高。
5.另外,关于通过接收发送的电波被规定的物体反射的反射波来检测该物体的存在的技术,提出了各种方案。例如专利文献1公开了一种fm-cw雷达装置,其将以特定的周期进行了直线fm调制的发送信号向目标物体照射,通过与来自目标物体的接收信号之间的差检测差拍信号,并根据该信号的频率分析进行距离/速度测量。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开平11-133144号公报
技术实现要素:
9.一实施方式的电子设备,具有:发送天线,发送发送波;接收天线,接收所述发送波被反射后的反射波;以及控制部。
10.所述控制部基于作为所述发送波发送的发送信号以及作为所述反射波接收的接收信号,以恒虚警率来检测目标。
11.所述控制部在基于所述接收信号的信号强度的距离方向的分布中,设定检查区域以及以该检查区域为基准的至少一个以上的参照区域,并基于该参照区域中的信号强度的顺序统计量来设定用于所述目标的检测的阈值。
12.一实施方式的电子设备的控制方法,包括以下的步骤。
13.(1)从发送天线发送发送波的步骤;
14.(2)由接收天线接收所述发送波被反射后的反射波的步骤;
15.(3)基于作为所述发送波发送的发送信号以及作为所述反射波接收的接收信号,以恒虚警率来检测目标的步骤;
16.(4)在基于所述接收信号的信号强度的距离方向的分布中,设定检查区域以及以该检查区域为基准的至少一个以上的参照区域的步骤;以及
17.(5)基于所述参照区域中的信号强度的顺序统计量设定用于所述目标的检测的阈值的步骤。
18.一实施方式的程序,使计算机执行上述的步骤(1)至(5)。
附图说明
19.图1是说明一实施方式的电子设备的使用方式的图。
20.图2是概略地表示一实施方式的电子设备的结构的功能框图。
21.图3是说明一实施方式的发送信号的结构的图。
22.图4是说明一实施方式的控制部中的处理模块的图。
23.图5是说明在一实施方式的电子设备中执行os-cfer处理的示例的图。
24.图6是说明在一实施方式的电子设备中执行os-cfer处理的示例的图。
25.图7是说明一实施方式的控制部中的处理的示例的图。
26.图8是表示一实施方式的控制部中的处理结果的示例的图。
27.图9是表示一实施方式的控制部中的处理结果的示例的图。
28.图10是表示一实施方式的控制部中的处理结果的示例的图。
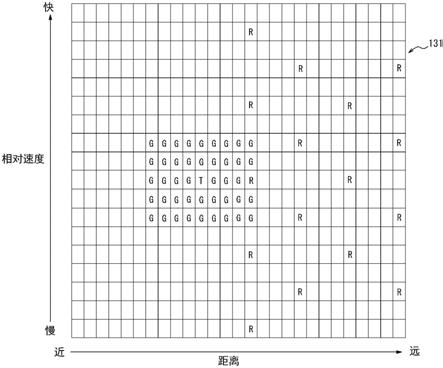
29.图11是说明一实施方式的控制部中的处理的示例的图。
30.图12是表示一实施方式的控制部中的处理结果的示例的图。
具体实施方式
31.在通过接收发送的发送波被规定的物体反射的反射波来检测该物体的技术中,期望提高检测目标的精度。本发明的目的在于,提供一种可以提高检测目标的精度的电子设备、电子设备的控制方法以及程序。根据一个实施方式,能够提供一种可以提高检测目标的精度的电子设备、电子设备的控制方法以及程序。以下,参照附图对一个实施方式进行详细说明。
32.一个实施方式的电子设备例如能够通过搭载于汽车等交通工具(移动体),将存在于该移动体的周围的规定的物体作为目标检测。为此,一个实施方式的电子设备能够从设置于移动体的发送天线向移动体的周围发送发送波。另外,一个实施方式的电子设备能够从设置于移动体的接收天线接收发送波被反射的反射波。发送天线以及接收天线中的至少一方例如可以设置在设置于移动体的雷达传感器等。
33.以下,作为典型的例子,对一个实施方式的电子设备搭载于轿车这样的汽车的结构进行说明。但是,一个实施方式的电子设备不限于搭载于汽车等。一个实施方式的电子设备可以搭载于自动驾驶汽车、公共汽车、出租车、卡车、摩托车、自行车、船舶、飞机、直升机、牵引车等农业装置、除雪车、清扫车、警车、救护车、以及无人机等各种移动体。另外,一个实施方式的电子设备并不限于搭载于自身移动的移动体。例如,一个实施方式的电子设备所搭载的移动体也可以是由牵引车牵引的拖车部分等。一个实施方式的电子设备在传感器和规定的物体中的至少一方能够移动的这种状况下,能够测量传感器与物体之间的距离等。另外,一实施方式的电子设备即使在传感器以及物体双方静止时,也能够测定传感器与物体之间的距离等。另外,包含于本发明的汽车并非由全长、全宽、全高、排气量、定员、装载量等限定。例如,本发明的汽车也包括排气量大于660cc的汽车、排气量为660cc以下的汽车即
所谓的轻型汽车等。另外,包含于本发明的汽车也包括能量的一部分或全部利用电力并利用马达的汽车。
34.首先,对利用一个实施方式的电子设备检测物体的例子进行说明。
35.图1是说明一个实施方式的电子设备的使用方式的图。图1表示将一个实施方式的具有发送天线以及接收天线的传感器设置于移动体的例子。
36.在图1所示的移动体100中设置有一个实施方式的具有发送天线以及接收天线的传感器5。另外,图1所示的移动体100搭载(例如内置)一个实施方式的电子设备1。对于电子设备1的具体的结构将在后面进行描述。传感器5例如可以具有发送天线以及接收天线中的至少一方。另外,传感器5也可以适当地包含电子设备1所包含的控制部10(图2)的至少一部分等其他功能部中的至少任一个。图1所示的移动体100可以是轿车这种汽车车辆,但也可以是任意类型的移动体。在图1中,移动体100可以向例如图示的y轴正方向(行进方向)移动(行驶或者缓行),也可以向其他方向移动,还可以不移动而静止。
37.如图1所示,在移动体100中设置有具有发送天线的传感器5。在图1所示的例子中,仅一个具有发送天线以及接收天线的传感器5设置在移动体100的前方。其中,传感器5设置于移动体100的位置并不限定于图1所示的位置,也可以适当地设置在其他位置。例如,可以将图1所示的这样的传感器5设置在移动体100的左侧、右侧、和/或后方等。另外,根据移动体100中的测量的范围和/或精度等各种条件(或者要求),可以将这样的传感器5的个数设置为一个以上的任意数。传感器5也可以设置在移动体100的内部。移动体100的内部例如可以是保险杠内的空间、机体内的空间、前灯内的空间或者驾驶空间的空间等。
38.传感器5从发送天线发送电磁波作为发送波。例如在移动体100的周围存在规定的物体(例如图1所示的物体200)的情况下,从传感器5发送的发送波中的至少一部分被该物体反射成为反射波。并且,搭载于移动体100的电子设备1能够通过例如由传感器5的接收天线接收这样的反射波,将该物体作为目标检测。
39.具有发送天线的传感器5典型地可以为收发电波的雷达(radar(radio detecting and ranging))传感器。然而,传感器5不限于雷达传感器。一个实施方式的传感器5例如也可以为基于光波的lidar(light detection and ranging(光检测与测距)、laser imaging detection and ranging(激光成像检测与测距))技术的传感器。这些传感器可以构成为包括例如贴片天线等。由于radar以及lidar这样的技术是已知的,因此有时适当地简化或者省略详细说明。
40.搭载于图1所示的移动体100的电子设备1由接收天线接收从传感器5的发送天线发送的发送波的反射波。通过这样的方式,电子设备1能够将存在于距移动体100的规定的距离内的规定的物体200作为目标检测。例如,如图1所示,电子设备1能够测量作为本车辆的移动体100与规定的物体200之间的距离l。另外,电子设备1还能够测量作为本车辆的移动体100与规定的物体200之间的相对速度。而且,电子设备1还能够测量来自规定的物体200的反射波向作为本车辆的移动体100到来的方向(到来角θ)。
41.其中,物体200例如可以是在与移动体100相邻的车道上行驶的对向车、与移动体100并行的汽车、以及在与移动体100相同的车道上行驶的前后的汽车等中的至少任一个。另外,物体200也可以是摩托车、自行车、婴儿车、行人等人、动物、昆虫、其他生物、护栏、中央隔离带、路标、人行道台阶、墙壁、人出入口(manhole)、或障碍物等存在于移动体100周围
的任意的物体。而且,物体200可以移动,也可以停止。例如,物体200也可以是在移动体100的周围泊车或停车的汽车等。在本发明中,传感器5所检测的物体除了非生物之外,还包含人或动物等生物。本发明的传感器5所检测的物体包含由雷达技术检测的包括人、物以及动物等的物标。
42.在图1中,传感器5的大小与移动体100的大小的比率不一定表示实际的比率。另外,在图1中,示出了传感器5设置在移动体100的外部的状态。然而,在一个实施方式中,传感器5可以设置在移动体100的各种位置。例如,在一个实施方式中,传感器5可以设置在移动体100的保险杠的内部,以防止出现在移动体100的外观上。
43.以下,作为典型的例子,对传感器5的发送天线发送毫米波(30ghz以上)或者准毫米波(例如20ghz~30ghz附近)等这样的频带的电波的情况进行说明。例如,传感器5的发送天线可以发送如77ghz~81ghz这样的具有4ghz的频带宽度的电波。
44.图2是概略地表示一个实施方式的电子设备1的结构例的功能框图。以下,对一个实施方式的电子设备1的结构的一个例子进行说明。
45.当通过毫米波方式的雷达来测量距离等时,大多使用频率调制连续波雷达(以下,记为fmcw雷达(frequency modulated continuous wave radar))。fmcw雷达扫描发送的电波的频率来生成发送信号。因此,例如在使用79ghz频带的电波的毫米波方式的fmcw雷达中,使用的电波的频率例如为77ghz~81ghz这样的具有4ghz的频带宽度。79ghz的频带的雷达与例如24ghz、60ghz、76ghz的频带等其他毫米波/准毫米波雷达相比,具有可用的频带宽度更宽的特征。以下,作为例子,对这样的实施方式进行说明。
46.如图2所示,一个实施方式的电子设备1由传感器5和ecu(electronic control unit:电子控制单元)50构成。ecu50控制移动体100的各种动作。ecu50可以由至少一个以上的ecu构成。一个实施方式的电子设备1具有控制部10。另外,一个实施方式的电子设备1可以适当地包括发送部20、接收部30a~30d、以及存储部40等中至少任意一个这样的其他功能部。如图2所示,电子设备1可以具有接收部30a~30d这样的多个接收部。以下,在不区分接收部30a、接收部30b、接收部30c、接收部30d等的情况下,将它们简称为“接收部30”47.控制部10可以具有距离fft处理部11、速度fft处理部12、距离速度检测判定部13、到来角推定部14、以及物体检测部15。后面将进一步说明控制部10中包含的这些功能部。
48.如图2所示,发送部20可以具有信号生成部21、合成器22、相位控制部23a以及23b、放大器24a以及24b、以及发送天线25a以及25b。以下,在不区分相位控制部23a和相位控制部23b的情况下,将它们简称为“相位控制部23”。另外,以下,在不区分放大器24a和放大器24b的情况下,将它们简称为“放大器24”。另外,以下,在不区分发送天线25a和发送天线25b的情况下,将它们简称为“发送天线25”。
49.如图2所示,接收部30可以包括分别对应的接收天线31a~31d。以下,在不区分接收天线31a、接收天线31b、接收天线31c、接收天线31d的情况下,将它们简称为“接收天线31”。另外,如图2所示,多个接收部30分别具有lna32、混频器33、if部34以及ad转换部35。接收部30a~30d可以分别具有相同的结构。在图2中,作为典型的例子,概略地示出了只有接收部30a的结构。
50.上述传感器5可以包括例如发送天线25和接收天线31。另外,传感器5可以适当地包括控制部10等其他功能部中的至少任一个。
51.一个实施方式的电子设备1所具有的控制部10能够进行以控制构成电子设备1的各功能部为首的电子设备1整体的动作控制。为了提供用于执行各种功能的控制以及处理能力,控制部10可以包括例如cpu(central processing unit:中央处理单元)那样的至少一个处理器。控制部10既可以集中由一个处理器实现,也可以由几个处理器实现,还可以分别由单独的处理器实现。处理器可以实现为单一的集成电路。集成电路也称为ic(integrated circuit)。处理器可以作为多个可通信地连接的集成电路及分立电路来实现。处理器可以基于其他各种已知的技术来实现。在一个实施方式中,控制部10例如可以构成为cpu以及由该cpu执行的程序。控制部10也可以适当包含控制部10的动作所需的存储器。
52.存储部40可以存储在控制部10中执行的程序以及在控制部10中执行的处理的结果等。另外,存储部40可以作为控制部10的工作存储器发挥功能。存储部40例如可以由半导体存储器或磁盘等构成,但不限于这些,可以是任意的存储装置。另外,例如,存储部40可以是插入本实施方式的电子设备1中的存储卡这样的存储介质。另外,如上所述,存储部40也可以是用作控制部10的cpu的内部存储器。
53.在一个实施方式中,存储部40可以存储用于设定通过从发送天线25发送的发送波t以及由接收天线31接收的反射波r来检测物体的范围的各种参数。
54.在一个实施方式的电子设备1中,控制部10能够控制发送部20以及接收部30中的至少一方。在该情况下,控制部10可以基于存储在存储部40中的各种信息,控制发送部20以及接收部30中的至少一方。另外,在一个实施方式的电子设备1中,控制部10可以指示信号生成部21生成信号,或者控制信号生成部21生成信号。
55.通过控制部10的控制,信号生成部21生成从发送天线25作为发送波t发送的信号(发送信号)。信号生成部21在生成发送信号时,例如可以基于控制部10的控制,来分配发送信号的频率。具体来说,信号生成部21可以根据由例如控制部10设定的参数,分配发送信号的频率。例如,信号生成部21通过由控制部10或存储部40接收频率信息,来生成例如77~81ghz这样的频带的规定的频率的信号。信号生成部21可以构成为包括例如压控振荡器(vco)这样的功能部。
56.信号生成部21可以构成为具有该功能的硬件,例如可以由微机等构成,也可以构成为例如cpu这样的处理器以及由该处理器执行的程序等。以下描述的各功能部可以构成为具有该功能的硬件,在可能的情况下,例如可以由微机等构成,也可构成为例如cpu这样的处理器以及由该处理器执行的程序等。
57.在一个实施方式的电子设备1中,信号生成部21例如可以生成线性调频信号(chirp signal)这样的发送信号(发送线性调频信号)。尤其是,信号生成部21可以生成频率周期性地线形变化的信号(线形线性调频信号(linear chirp signal))。例如,信号生成部21可以生成频率随时间的经过从77ghz到81ghz周期性线形地增大的线性调频信号。另外,例如,信号生成部21可以生成频率随时间的经过从77ghz到81ghz周期性地反复进行线形的增大(向上线性调频)以及减小(向下线性调频)的信号。信号生成部21生成的信号例如可以在控制部10中预先设定。另外,信号生成部21生成的信号也可以预先存储在例如存储部40等中。由于在雷达这样的技术领域中使用的线性调频信号是已知的,因此适当地简化或省略详细的描述。由信号生成部21生成的信号向合成器22供给。
58.图3是说明信号生成部21生成的线性调频信号的例子的图。
59.在图3中,横轴表示经过的时间,纵轴表示频率。在图3所示的例子中,信号生成部21生成频率周期性线性地变化的线性线性调频信号。在图3中,示出了将各线性调频信号设为c1,c2,
…
,c8。如图3所示,在各个线性调频信号中,频率随时间的经过而线性地增大。
60.在图3所示的例子中,作为1个子帧包括c1,c2,
…
,c8这样的8个线性调频信号。即,图3所示的子帧1以及子帧2等构成为分别包括c1,c2,
…
,c8这样的8个线性调频信号。另外,在图3所示的例子中,作为1个帧包括子帧1~子帧16这样的16个子帧。即,图3所示的帧1以及帧2等构成为分别包括16个子帧。另外,如图3所示,在帧彼此之间也可以包括规定的长度的帧间隔。图3所示的1个帧例如可以为30毫秒至50毫秒左右的长度。
61.在图3中,帧2以后也可以是同样的结构。另外,在图3中,在帧3以后也可以是同样的结构。在一个实施方式的电子设备1中,信号生成部21可以生成发送信号作为任意数量的帧。另外,在图3中,省略地示出了一部分的线性调频信号。这样,信号生成部21生成的发送信号的时间与频率之间的关系例如可以存储在存储部40等中。
62.这样,一个实施方式的电子设备1可以发送由包括多个线性调频信号的子帧构成的发送信号。另外,一个实施方式的电子设备1可以发送由包括规定数量的子帧的帧构成的发送信号。
63.以下,对电子设备1发送图3所示的帧结构的发送信号的情况进行说明。然而,图3所示的帧结构是一个例子,例如,1个子帧中包含的线性调频信号不限于8个。在一个实施方式中,信号生成部21可以生成包括任意数量(例如,任意多个)的线性调频信号的子帧。另外,图3所示的子帧结构也是一个例子,例如,1个帧中包含的子帧不限于16。在一个实施方式中,信号生成部21可以生成包括任意数量(例如,任意多个)子帧的帧。信号生成部21可以生成不同频率的信号。信号生成部21也可以生成频率f分别不同的带宽的多个离散的信号。
64.返回到图2,合成器22使信号生成部21生成的信号的频率上升到规定的频带的频率。合成器22可以将信号生成部21生成的信号的频率上升到作为从发送天线25发送的发送波t的频率而选择的频率。作为从发送天线25发送的发送波t的频率而选择的频率可以通过例如控制部10来设定。另外,作为从发送天线25发送的发送波t的频率而选择的频率可以存储在例如存储部40中。将通过合成器22使频率上升的信号向相位控制部23以及混频器33供给。在相位控制部23为多个的情况下,通过合成器22使频率上升的信号可以向多个相位控制部23中的每一个供给。另外,在接收部30为多个的情况下,通过合成器22使频率上升的信号可以向多个接收部30中的各个混频器33供给。
65.相位控制部23控制由合成器22供给的发送信号的相位。具体来说,相位控制部23例如可以通过基于控制部10的控制,使从合成器22供给的信号的相位适当提前或延迟,从而调整发送信号的相位。在该情况下,相位控制部23也可以基于从多个发送天线25发送的各个发送波t的路径差,来调整各个发送信号的相位。通过相位控制部23适当调整各个发送信号的相位,从多个发送天线25发送的发送波t在规定的方向上增强而形成波束(波束成形)。在该情况下,波束成形的方向与多个发送天线25分别发送的发送信号的应控制的相位量之间的相关关系例如可以存储在存储部40中。通过相位控制部23进行了相位控制的发送信号被供给至放大器24。
66.放大器24例如基于控制部10的控制,使从相位控制部23供给的发送信号的功率
(电力)放大。在传感器5具有多个发送天线25的情况下,多个放大器24例如可以基于控制部10的控制,分别使从多个相位控制部23中的分别对应的相位控制部供给的发送信号的功率(电力)放大。由于使发送信号的功率放大的技术本身是已知的,因此,省略更详细的说明。放大器24与发送天线25连接。
67.发送天线25将通过放大器24放大的发送信号作为发送波t输出(发送)。在传感器5具备多个发送天线25的情况下,多个发送天线25可以将由多个放大器24中的分别对应的放大器放大后的发送信号分别作为发送波t输出(发送)。由于发送天线25能够以与已知的雷达技术中使用的发送天线同样的方式构成,因此省略更详细的说明。
68.这样一来,一个实施方式的电子设备1包括发送天线25,并且能够从发送天线25发送发送信号(例如发送线性调频信号)作为发送波t。其中,构成电子设备1的各功能部中的至少一个可以被容纳在一个框体中。另外,在该情况下,该一个框体也可以是不容易打开的结构。例如,发送天线25、接收天线31、放大器24被容纳在一个框体中,并且,该框体可以是不容易打开的结构。而且,其中,在传感器5设置于汽车这样的移动体100的情况下,发送天线25可以经由例如雷达罩这样的罩构件,将发送波t发送到移动体100的外部。在该情况下,雷达罩可以由例如合成树脂或者橡胶这样的使电磁波通过的物质构成。该雷达罩例如可以作为传感器5的壳体。通过用雷达罩这样的构件来覆盖发送天线25,能够降低因发送天线25与外部接触而损坏或发生故障的风险。另外,上述雷达罩以及壳体有时也被称为雷达天线罩。
69.图2所示的电子设备1示出了具有两个发送天线25的例子。然而,在一个实施方式中,电子设备1可以具有任意个数的发送天线25。另一方面,在一个实施方式中,电子设备1在从发送天线25发送的发送波t在规定方向上形成波束的情况下,也可以具有多个发送天线25。在一个实施方式中,电子设备1也可以具有任意的多个发送天线25。在该情况下,电子设备1也可以具有分别与多个发送天线25对应的多个相位控制部23以及放大器24。并且,多个相位控制部23可以分别控制从合成器22供给并从多个发送天线25发送的多个发送波的相位。另外,多个放大器24可以分别放大从多个发送天线25发送的多个发送信号的功率。另外,在该情况下,传感器5可以构成为包括多个发送天线。这样,图2所示的电子设备1在具有多个发送天线25的情况下,还可以构成为包括从该多个发送天线25发送发送波t所需的多个功能部。
70.接收天线31接收反射波r。反射波r可以是发送波t被规定的物体200反射的波。接收天线31可以构成为包括接收天线31a~接收天线31d这样的多个天线。由于接收天线31能够与已知的雷达技术中使用的接收天线同样地构成,因此省略了更详细的说明。接收天线31与lna32连接。基于通过接收天线31接收的反射波r的接收信号被供给至lna32。
71.一个实施方式的电子设备1能够从多个接收天线31接收例如作为线性调频信号这样的发送信号(发送线性调频信号)发送的发送波t被规定的物体200反射的反射波r。这样,在将发送线性调频信号作为发送波t发送的情况下,将基于接收的反射波r的接收信号称为接收线性调频信号。即,电子设备1由接收天线31接收作为反射波r的接收信号(例如接收线性调频信号)。其中,在传感器5设置在汽车这样的移动体100的情况下,接收天线31例如可以经由雷达罩这样的罩构件,从移动体100的外部接收反射波r。在该情况下,雷达罩例如可以由合成树脂或者橡胶这样的使电磁波通过的物质构成。该雷达罩例如可以作为传感器5
的壳体。通过用雷达罩这样的构件来覆盖接收天线31,能够降低接收天线31因与外部接触而损坏或发生故障的风险。另外,上述雷达罩以及壳体也被称为雷达天线罩。
72.另外,在接收天线31设置在发送天线25附近的情况下,可以将这些天线集中起来包含在一个传感器5中。即,在一个传感器5中,可以包括例如至少一个发送天线25以及至少一个接收天线31。例如,一个传感器5可以包括多个发送天线25以及多个接收天线31。在这样的情况下,例如可以通过一个雷达罩这样的罩构件来覆盖一个雷达传感器。
73.lna32将基于通过接收天线31接收的反射波r的接收信号以低噪声进行放大。lna32可以作为低噪声放大器(low noise amplifier),将从接收天线31供给的接收信号以低噪声进行放大。由lna32放大的接收信号被供给至混频器33。
74.混频器33通过将从lna32供给的rf频率的接收信号与从合成器22供给的发送信号混合(相乘),来生成差拍信号。由混频器33混合的差拍信号被供给至if部34。
75.if部34通过对从混频器33供给的差拍信号进行频率转换,将差拍信号的频率降低到中频(if(intermediate frequency)频率)。由if部34降低频率的差拍信号被供给至ad转换部35。
76.ad转换部35对从if部34供给的模拟的差拍信号进行数字化。ad转换部35可以由任意的模拟-数字转换电路(analog to digital converter(adc))构成。由ad转换部35数字化的差拍信号被供给至控制部10的距离fft处理部11。在接收部30为多个的情况下,可以将由多个ad转换部35数字化的各个差拍信号供给至距离fft处理部11。
77.距离fft处理部11基于从ad转换部35供给的差拍信号来推定搭载有电子设备1的移动体100与物体200之间的距离。距离fft处理部11例如可以包括进行快速傅里叶变换的处理部。在该情况下,距离fft处理部11可以由进行快速傅里叶变换(fast fourier transform(fft))处理的任意电路或芯片等构成。
78.距离fft处理部11对由ad转换部35数字化的差拍信号进行fft处理(以下,适当地称为“距离fft处理”)。例如,距离fft处理部11可以对从ad转换部35供给的复信号进行fft处理。由ad转换部35数字化的差拍信号能够表示为信号强度(功率)的时间变化。距离fft处理部11通过对这种差拍信号执行fft处理,能够表示为与各个频率相对应的信号强度(功率)。在通过距离fft处理获得的结果中峰值在规定的阈值以上的情况下,距离fft处理部11可以判断为规定的物体200存在于与该峰值相对应的距离。例如,已知一种判断方法,像恒虚警率(cfar(constant false alarm rate))检测处理那样,在根据干扰信号的平均功率或振幅检测出阈值以上的峰值的情况下,判断为存在反射发送波的物体(反射物体)。
79.这样,一个实施方式的电子设备1能够基于作为发送波t发送的发送信号以及作为反射波r接收的接收信号,将反射发送波t的物体200作为目标检测。
80.距离fft处理部11能够基于1个线性调频信号(例如,图3所示的c1)来推定与规定的物体之间的距离。即,电子设备1能够通过进行距离fft处理来测量(推定)图1所示的距离l。通过对差拍信号进行fft处理来测量(推定)与规定的物体之间的距离的技术本身是已知的,因此将适当地简化或省略更详细的描述。可以将由距离fft处理部11进行了距离fft处理的结果(例如,距离的信息)供给至速度fft处理部12。另外,也可以将由距离fft处理部11进行了距离fft处理的结果供给至距离速度检测判定部13和/或物体检测部15等。
81.速度fft处理部12基于由距离fft处理部11进行了距离fft处理的差拍信号,来推
定搭载有电子设备1的移动体100与物体200之间的相对速度。速度fft处理部12例如可以包括进行快速傅里叶变换的处理部。在该情况下,速度fft处理部12可以由进行快速傅里叶变换(fast fourier transform(fft))处理的任意电路或芯片等构成。
82.速度fft处理部12还对由距离fft处理部11进行了距离fft处理的差拍信号执行fft处理(以下,适当地称为“速度fft处理”)。例如,速度fft处理部12可以对从距离fft处理部11供给的复信号进行fft处理。速度fft处理部12能够基于线性调频信号的子帧(例如图3所示的子帧1)来推定与规定的物体的相对速度。如上所述,如果对差拍信号进行距离fft处理,则能够生成多个矢量。通过求出对这些多个矢量进行了速度fft处理的结果中的峰值的相位,从而能够推定与规定的物体的相对速度。即,电子设备1能够通过进行速度fft处理来测量(推定)图1所示的移动体100与规定的物体200之间的相对速度。由于通过对进行了距离fft处理的结果进行速度fft处理来测量(推定)与规定的物体的相对速度的技术本身是已知的,因此可以适当地简化或省略更详细的描述。由速度fft处理部12进行了速度fft处理的结果(例如,速度的信息)可以被供给至到来角推定部14。另外,可以将由速度fft处理部12进行了速度fft处理的结果供给至距离速度检测判定部13和/或物体检测部15等。
83.距离速度检测判定部13基于由距离fft处理部11进行了距离fft处理的结果和/或由速度fft处理部12进行了速度fft处理的结果,进行关于距离和/或相对速度的判定处理。距离速度检测判定部13在规定的距离和/或规定的相对速度下判定是否检测到目标。关于距离速度检测判定部13,将在后面进一步描述。
84.到来角推定部14基于由速度fft处理部12进行了速度fft处理的结果,推定反射波r从规定的物体200到来的方向。电子设备1能够通过由多个接收天线31接收反射波r来推定反射波r到来的方向。例如,多个接收天线31以规定的间隔配置。在该情况下,从发送天线25发送的发送波t被规定的物体200反射成为反射波r,以规定的间隔配置的多个接收天线31分别接收反射波r。然后,到来角推定部14能够基于由多个接收天线31分别接收的反射波r的相位以及各个反射波r的路径差,来推定反射波r向接收天线31到来的方向。即,电子设备1能够基于进行了速度fft处理的结果,来测量(推定)图1所示的到来角θ。
85.提出了各种基于进行了速度fft处理的结果来推定反射波r到来的方向的技术。例如,作为已知的推定到来方向的算法,已知music(multiple signal classification:多重信号分类)和esprit(estimation of signal parameters via rotational invariance technique:旋转不变参数估计技术)等。因此,将适当地简化或省略关于已知技术的更详细描述。由到来角推定部14推定的到来角θ的信息(角度信息)可以被供给至物体检测部15。
86.物体检测部15基于从距离fft处理部11、速度fft处理部12、以及到来角推定部14中的至少一个供给的信息,检测存在于发送波t被发送的范围内的物体。物体检测部15可以通过基于所供给的距离的信息、速度的信息、以及角度信息进行例如聚类处理,来进行物体检测。作为对数据进行聚类时使用的算法,例如已知dbscan(density-based spatial clustering of applications with noise)等。在聚类处理中,例如可以计算出构成所检测的物体的点的平均功率。由物体检测部15检测出的物体的距离的信息、速度的信息、角度信息、以及功率的信息例如可以被供给至ecu50等。在该情况下,当移动体100为汽车时,例如可以使用can(controller area network)这样的通信接口来进行通信。
87.一个实施方式的电子设备1所具有的ecu50能够进行以控制构成移动体100的各功
能部为首的移动体100整体的动作的控制。为了提供用于执行各种功能的控制以及处理能力,ecu50例如可以包括cpu(central processing unit:中央处理单元)这样的至少一个处理器。ecu50可以集中由一个处理器实现,也可以由几个处理器实现,还可以分别由单独的处理器实现。处理器可以作为单一的集成电路来实现。集成电路也称为ic(integrated circuit)。处理器可以作为多个可通信地连接的集成电路及分立电路来实现。处理器可以基于其他各种已知的技术来实现。在一个实施方式中,ecu50例如可以构成为cpu以及由该cpu执行的程序。ecu50也可以适当包含ecu50的动作所需的存储器。另外,控制部10的功能中的至少一部分可以为ecu50的功能,ecu50的功能的至少一部分也可以为控制部10的功能
88.图2所示的电子设备1具有两个发送天线25以及四个接收天线31。然而,一个实施方式的电子设备1也可以具有任意数量的发送天线25以及任意数量的接收天线31。例如,认为通过具有两个发送天线25以及四个接收天线31,电子设备1可以具有由8个天线虚拟地构成的虚拟天线阵列。这样,电子设备1可以通过使用例如虚拟的8个天线来接收图3所示的16个子帧的反射波r。
89.接下来,对由一个实施方式的电子设备1进行的目标检测处理进行说明。
90.如上所述,一个实施方式的电子设备1从发送天线发送发送波,并从接收天线接收由作为目标的物体和/或杂波等反射发送波后的反射波。然后,一个实施方式的电子设备1基于发送信号和/或接收信号,能够将反射发送波的物体作为目标检测。
91.在通常的fm-cw雷达的技术中,能够基于对从接收信号提取差拍频率而得到的信号进行快速傅里叶变换处理等而得到的结果,来判定是否存在目标。其中,在从接收信号中提取差拍频率并进行快速傅里叶变换处理等而得到的结果中,还包括杂波(不需要的反射成分)等引起的噪声(noise)的成分。因此,可以执行用于从处理接收信号的结果中去除噪声分量并且仅提取目标信号的处理。
92.作为判定是否存在目标的方法,存在如下方式(阈值检测方式):对接收信号的输出设定阈值,在反射信号的强度超过该阈值的情况下,视为存在目标。若采用该方式,则在杂波的信号强度超过该阈值的情况下,也会被判定为目标,会发出所谓的“虚警”。该杂波的信号强度是否超过阈值是概率统计的。该杂波的信号强度超过阈值的概率被称为“虚警概率”。作为用于将该虚警概率恒定地抑制较低的方法,能够使用恒虚警率(constant false alarm rate)。
93.以下,也将恒虚警率(constant false alarm rate)简称为cfar。在cfar中,利用噪声的信号强度(振幅)遵循瑞利(rayleigh)分布这样的假设。基于该假设,如果固定用于计算用于判定是否检测到目标的阈值的权重,则无论噪声的振幅如何,目标检测的错误率在理论上都是恒定的。
94.作为通常的雷达技术中的cfar,已知有cell averaging cfar(以下,也记为ca-cfar,单元平均恒虚警率)这样的方式。在ca-cfar中,可以将实施了规定处理的接收信号的信号强度的值(例如振幅值)每隔恒定的采样周期依次输入到移位寄存器。该移位寄存器在中央具有检查单元(cell under test),在该检查单元的两侧分别具有多个参照单元(reference cell)。每次将信号强度的值输入到移位寄存器时,以前输入的信号强度的值一个一个地从移位寄存器的一端侧(例如左端侧)移动到另一端侧(例如右端侧)的单元中。另外,与输入的定时同步地,将参照单元的各值进行平均化。将通过这样的方式得到的平均
值与规定的权重相乘,从而计算为阈值。在检查单元的值大于通过这样的方式计算出的阈值的情况下,直接输出检查单元的值。另一方面,在检查单元的值不大于计算出的阈值的情况下,输出0(零)值。这样,在ca-cfar中,通过根据参照单元的平均值计算阈值,来判定是否存在目标,从而能够获得检测结果。
95.在ca-cfar中,例如在多个目标接近地存在的情况下,根据算法的性质,在目标的附近计算出的阈值变大。因此,即使具有充足的信号强度,也可能存在未被检测的目标。同样地,在杂波有级差的情况下,在该杂波的级差的附近计算出的阈值也变大。在该情况下,也有可能未检测到位于杂波的级差的附近的较小的目标。
96.作为对上述的ca-cfar,根据参照单元中的值的中值(中央值),或者将参照单元中的值按照升序重排时的第规定个的值来获得阈值的方法,存在order statistic cfar(以下,也记为os-cfar,有序统计恒虚警率)这样的方法。os-cfar是基于顺序统计(ordered statistics)设定阈值,并在超过该阈值的情况下判定为存在目标的方法。根据该os-cfar,能够应对上述那样的ca-cfar中的问题点。os-cfar能够通过进行与ca-cfar部分不同的处理来实现。
97.以下,进一步地,对在一个实施方式的电子设备1中执行os-cfar处理的例子进行说明。
98.一个实施方式的电子设备1例如可以在图2所示的控制部10的距离速度检测判定部13中进行os-cfar处理。一个实施方式的电子设备1例如也可以在图2所示的控制部10的距离fft处理部11和/或速度fft处理部12中进行os-cfar处理。以下,参照图4,对在距离速度检测判定部13中进行os-cfar处理的情况的例子进行说明。
99.如在图2中说明的那样,在一个实施方式的电子设备1中,由信号生成部21生成的线性调频信号的频率上升至由合成器22选择的频带的频率。然后,上升了频率的线性调频信号经由相位控制部23以及放大器24等,从发送天线25发送。另外,由反射物体反射的线性调频信号经由接收天线31以及lna32之后,在混频器33中与发送信号相乘,然后经由if部34被ad转换部35接收。在ad转换部35中接收的复信号在距离fft处理部11中进行距离fft处理。
100.在一个实施方式中,距离速度检测判定部13可以对进行了距离fft处理的信号执行os-cfar处理。图4是说明一个实施方式的电子设备1的控制部10中的处理的框图。更详细来说,图4是说明在控制部10的距离速度检测判定部13中执行os-cfar处理的电路的逻辑的一例的图。如图4所示,为了执行os-cfar处理,距离速度检测判定部13可以包括移位寄存器131、排序部132、数据选择部133、阈值计算部134、权重设定部135、以及检测判定部136。
101.在os-cfar中,也与ca
‑‑
cfar的情况同样地,可以将实施了规定的处理的接收信号的信号强度的值每隔恒定的采样周期依次输入到移位寄存器131中。在每次将信号强度的值输入到移位寄存器131中时,以前输入的信号强度的值一个一个地从移位寄存器131的一端侧(例如左端侧)移动到另一端侧(例如右端侧)的单元中即可。这样,在一个实施方式中,(距离速度检测判定部13的)移位寄存器131可以通过先入先出(first input first output)方式将基于以规定的采样周期从一方输入的接收信号的信号强度向另一方移位。
102.如图4所示,移位寄存器131可以在中央的检查区域具有检查单元t。以下,将配置有检查单元t的区域称为“检查区域”。另外,移位寄存器131可以在检查单元t的两侧的保护
区域分别具有保护单元g。在图4中,示出了保护单元g分别为连续的两个单元,但保护单元g的个数可以是任意的。以下,将配置有保护单元g的区域称为“保护区域”。而且,移位寄存器131在各个保护单元g的外侧的参照区域分别具有多个参照单元r。在图4中,示出了参照单元r分别为连续的4个单元,但参照单元r的个数可以是任意的。以下,将配置有参照单元r的区域称为“参照区域”。这样,在一个实施方式中,控制部10(距离速度检测判定部13的移位寄存器131)可以在距离方向上,在检查区域与参照区域之间设置保护区域。另外,如上所述,在一个实施方式中,移位寄存器131可以包括检查区域中的检查单元t以及参照区域中的参照单元r。
103.排序部132对从各个参照单元r输出的值按照升序重排。排序部132例如可以由任意的排序电路等构成。排序部132可以与向移位寄存器131输入信号强度的时机同步地,按照升序重排参照单元r的值。这样,在一实施方式中,控制部10(距离速度检测判定部13)也可以具有排序部132,该排序部132将从移位寄存器131中的参照单元r输出的信号强度按照升序重排。
104.数据选择部133可以在由排序部132重排后的值中,选择并取出规定的位置(例如从较小的一侧开始第规定个)的值。这样,在一个实施方式中,控制部10(距离速度检测判定部13)也可以具有数据选择部133,该数据选择部133选择由排序部132重排后的信号强度中的第规定个的信号强度。
105.阈值计算部134可以通过将由数据选择部133选择的值乘以规定的权重来计算阈值th。在该情况下,权重设定部135也可以通过将由数据选择部133选择的值例如乘以规定的权重m,来计算阈值th。这样,在一个实施方式中,控制部10(距离速度检测判定部13)也可以具有阈值计算部134,该阈值计算部134基于由数据选择部133选择的信号强度,设定用于检测目标的阈值。
106.检测判定部136将检查单元t中的信号强度的值a的大小与由阈值计算部134计算出的阈值th进行比较。在检查单元t中的信号强度的值a大于阈值th的情况下,检测判定部136直接输出检查单元t中的信号强度的值a作为检测结果。另一方面,在检查单元t中的信号强度的值a不大于阈值th的情况下,检测判定部136输出零作为检测结果。这样,在一个实施方式中,控制部10(距离速度检测判定部13的检测判定部136)可以基于检查区域中的检查单元t的信号强度的值a和阈值th,来判定是否存在目标。
107.在os-cfar中,可以根据排序后的信号强度中的规定位置(例如按照从小到大的顺序的第规定个)的值计算阈值,来抑制基于反射波的信号对阈值的计算造成的影响。因此,在os-cfar中,可以抑制在目标的附近阈值上升。另外,在os-cfar中,可以抑制在杂波的级差附近阈值上升。
108.在一个实施方式的电子设备1中,通过由距离fft处理部11对由ad转换部35数字化的差拍信号进行距离fft处理,从而能获得信号强度(功率)的距离方向的分布。如上所述,由距离fft处理部11进行距离fft处理的信号可以供给至距离速度检测判定部13(的移位寄存器131)。在该情况下,如图5所示,移位寄存器131的右侧可以对应于距电子设备1的传感器5远的距离。另外,移位寄存器131的左侧可以对应于距电子设备1的传感器5近的距离。图5是说明在一个实施方式的电子设备1中执行os-cfar处理的例子的图。在图5中,检查单元t、保护单元g、以及参照单元r的配置方式与图4所示的例子相同。
109.通过上述的os-cfar,一个实施方式的电子设备1能够进行距离检测的判定。即,一个实施方式的电子设备1的控制部10基于参照单元r中的信号强度(功率)中的从较低的一侧开始的第规定个(例如第k个)的值来计算距离阈值th。然后,如果检查单元t中的信号强度的值a大于距离阈值th,则一个实施方式的电子设备1的控制部10能够判定为在检查区域中存在目标。
110.在通过这样的方式判定出存在目标的距离中,控制部10的速度fft处理部12也可以对多个线性调频信号进行速度fft处理。另外,距离速度检测判定部13与上述的距离fft处理的情况同样地,也可以进行速度检测的判定。如上所述,由速度fft处理部12进行速度fft处理的信号可以供给至距离速度检测判定部13(的移位寄存器131)。在该情况下,如图6所示,移位寄存器131的上侧可以对应于电子设备1的传感器5与目标之间的相对速度快的区域。另外,如图6所示,移位寄存器131的下侧可以对应于电子设备1的传感器5与目标之间的相对速度慢的区域。图6是说明在一个实施方式的电子设备1中,执行os-cfar处理的例子的图。在图6中,虽然配置有检查单元t、保护单元g以及参照单元r,但图6所示的配置为一个例子。这样,一个实施方式的电子设备1能够进行基于速度方向的恒虚警率的速度检测的判定。
111.在图5所示的移位寄存器131中,多个参照单元r在距离方向上,连续地配置在检查区域的两侧。在os-cfar中,设想若图5所示的移位寄存器131那样来配置参照单元r,则根据状况不能准确地检测目标。
112.例如,设想在具有车载雷达的本车辆在高速道路等上行驶的情况下,使用车载雷达,来检测存在于本车辆的周围的其他车辆等。其中,假设以与本车辆行驶的车道并行的方式例如长距离中途不间断地设置铁栅栏这样的物体。在这种环境下,与车道并行地设置的铁栅栏这样的物体与本车辆之间的间隔(本车辆的宽度方向的距离)在行驶中几乎维持恒定。在该情况下,在移位寄存器131的参照区域(参照单元r)中,检测基于在距离方向上连续的较大的(较长的)干扰物(铁栅栏)的反射波的信号强度。因此,设想车载雷达能够将该铁栅栏作为目标检测。
113.然而,在与该铁栅栏并行的车道上,例如其他车辆等正在并行地行驶。在这样的情况下,即使想要将与铁栅栏并行的车辆等作为目标检测,配置有参照单元r的参照区域也会成为与由铁栅栏反射的反射波的信号强度对应的区域。在这种状况下,通过噪声功率增加,检查区域的检查单元t中的信号强度的值a可不超过阈值th。因此,设想车载雷达无法将该车辆作为目标检测。
114.另外,基于反射波的信号强度(功率)具有距雷达的距离越近越大的趋势。为此,若参照距电子设备1的传感器5的距离较近的区域,则噪声功率变高,因此,检查区域的检查单元t中的信号强度的值a可不超过阈值th。在这样的情况下,也设想车载雷达无法将对象作为目标检测。
115.为了应对这样的状况,一个实施方式的电子设备1在移位寄存器131中,可以二维地配置参照区域(参照单元r)。另外,一个实施方式的电子设备1在二维地配置的移位寄存器131中改变参照区域(参照单元r)的配置。以下,对一个实施方式的电子设备1以恒虚警率检测目标的情况进行说明。一实施方式的电子设备1在移位寄存器131中可以将参照区域(参照单元r)在相对速度方向或距离方向中的任意一个上一维地配置。
116.图7是表示一个实施方式的电子设备1的移位寄存器131中的参照区域(参照单元r)的二维配置的例子的图。在图7中,虽然也配置有检查单元t、保护单元g以及参照单元r,但图7所示的配置是一个例子。在图7中,也与图5同样地,移位寄存器131的右侧对应于距电子设备1的传感器5远的距离,移位寄存器131的左侧对应于距电子设备1的传感器5近的距离。另外,在图7中,与图6同样地,移位寄存器131的上侧对应于与电子设备1的传感器5之间的相对速度较快的区域,移位寄存器131的下侧对应于与电子设备1的传感器5之间的相对速度较慢的区域。图4所示的距离速度检测判定部13的移位寄存器131仅在距离方向上一维地配置参照区域(参照单元r)。另一方面,在一个实施方式中,距离速度检测判定部13的移位寄存器131可以在距离方向以及速度方向上二维地配置参照区域(参照单元r)。这样,在一个实施方式的电子设备1中,控制部10(的距离速度检测判定部13)可以具有包括检查区域中的检查单元t以及参照区域中的参照单元r的距离方向以及相对速度方向的二维的移位寄存器131。
117.如上所述,距离fft处理部11可以对多个线性调频信号进行距离傅里叶变换。另外,速度fft处理部12还可以对由距离fft处理部11进行距离傅里叶变换后的信号进行速度傅里叶变换。因此,距离速度检测判定部13可以针对对多个线性调频信号进行距离傅里叶变换后的信号进一步进行速度傅里叶变换后的结果,同时进行距离以及速度的检测判定。
118.如图7所示,一个实施方式的电子设备1的移位寄存器131也可以在距离方向上距检查区域(检查单元t)远的一侧上配置参照区域(参照单元r)。即,一个实施方式的电子设备1的移位寄存器131也可以不在距离方向上距检查区域近的一侧配置参照区域。图7所示的移位寄存器131没有在与近的距离对应的区域上配置参照区域,而在与远的距离对应的区域上配置参照区域。另一方面,如后所述,在一实施方式中,移位寄存器131也可以将参照区域配置于距检查区域的距离近的一侧。
119.另外,如图7所示,一个实施方式的电子设备1的移位寄存器131也可以在距离方向上间歇地配置参照区域(参照单元r)。即,一个实施方式的电子设备1的移位寄存器131也可以以在距离方向上不连续的方式配置参照单元r。图7所示的移位寄存器131以使参照单元r在距离方向上不连续的方式间歇地配置参照单元r。在图7所示的例子中,在距离方向上间歇地配置有16个参照单元r。然而,参照单元r的配置的数量例如可以根据目标检测的方式或者求出的精度等任意地配置。另外,在图7所示的例子中,参照单元r以在距离方向上每隔3个的方式配置。然而,在距离方向上间歇地配置参照单元r的间隔例如可以根据目标检测的方式或者求出的精度等任意地配置。另外,各参照单元r的距离方向的配置间隔可以是任意的间隔,各参照单元r的配置间隔可以是等间隔或者每个之间分别为不同的间隔等。另外,一实施方式的电子设备1的移位寄存器131也可以将参照区域(参照单元r)在距离方向上间歇地配置的情况和连续地配置的情况组合来配置。即,一实施方式的电子设备1的移位寄存器131也可以将参照单元r在距离方向上连续地配置的情况和不连续地配置的情况组合来使用。
120.而且,如图7所示,一个实施方式的电子设备1的移位寄存器131也可以在速度方向上间歇地配置参照区域(参照单元r)。即,一个实施方式的电子设备1的移位寄存器131也可以以在速度方向上不连续地配置参照单元r。图7所示的移位寄存器131以使参照单元r在速度方向上不连续的方式间歇地配置参照单元r。在图7所示的例子中,在速度方向上间歇地
配置有16个参照单元r。然而,参照单元r的配置的数量例如可以根据目标检测的方式或者求出的精度等任意地配置。另外,在图7所示的例子中,参照单元r以在速度方向上每隔一个的方式配置。然而,在速度方向上间歇地配置参照单元r的间隔例如可以根据目标检测的方式或者求出的精度等任意地配置。另外,各参照单元r的速度方向的配置间隔也可以是任意的间隔。各参照单元r的配置间隔例如可以是等间隔或者每个之间分别为不同的间隔等。另外,一实施方式的电子设备1的移位寄存器131也可以将参照区域(参照单元r)在速度方向上间歇地配置的情况和连续地配置的情况组合来配置。即,一实施方式的电子设备1的移位寄存器131也可以将参照单元r在速度方向上连续地配置的情况和不连续地配置的情况组合来使用。
121.如图7所示,与图5的情况同样地,移位寄存器131可以在距离方向上,在检查单元t的两侧的保护区域中分别具有保护单元g。另外,移位寄存器131也可以在速度方向上,在检查单元t的两侧的保护区域中分别具有保护单元g。这样,控制部10(距离速度检测判定部13的移位寄存器131)也可以在检查区域(检查单元t)的周围设置保护区域(保护单元g)。另外,在一个实施方式中,控制部10(距离速度检测判定部13的移位寄存器131)也可以在检查区域(检查单元t)的周围以与检查区域(检查单元t)相邻的方式设置保护区域(保护单元g)。在图7中,示出了保护单元g作为在距离方向上在检查单元t的两侧分别连续的三个或四个单元。另外,在图7中,示出了保护单元g为在速度方向上在检查单元t的两侧分别连续的两个单元。然而,保护单元g的个数并不限于如前述的示例,可以是任意的。例如,如图7所示,保护单元g也可以是在距离方向和速度方向上为不同个数的单元。另一方面,保护单元g也可以在距离方向和速度方向上为相同个数的单元。另外,保护单元g也可以在距离方向以及速度方向中的至少一方上在检查单元t的两侧为不同个数的单元。
122.一个实施方式的电子设备1在如上述那样配置了参照区域之后,根据上述的os-cfar,能够进行速度检测的判定。即,一个实施方式的电子设备1的控制部10基于参照单元r中的信号强度(功率)中的从低的一侧开始第规定个(例如第k个)的值来计算速度阈值th。然后,如果检查单元t中的信号强度的值a大于速度阈值th,则一个实施方式的电子设备1的控制部10能够判定在检查区域中存在目标。
123.通过这样的方式,一个实施方式的电子设备1能够进行基于恒虚警率的距离以及速度的检测的判定。
124.而且,在一个实施方式的电子设备1中,到来角推定部14也可以在判定为存在目标的速度下,基于多个接收天线31所接收的复信号,来推定反射波的到来方向。这样,一个实施方式的电子设备1能够推定目标存在的方向的角度。
125.在一个实施方式的电子设备1中,物体检测部15基于反射波的到来方向(角度)的信息、与目标之间的相对速度的信息、和/或、到目标为止的距离的信息,判定是否将物体作为目标检测(例如聚类)。其中,反射波的到来方向(角度)的信息可以从到来角推定部14获取。另外,与目标之间的相对速度和距离的信息可以从距离速度检测判定部13获取。另外,与目标之间的相对速度的信息也可以从速度fft处理部12获取。另外,到目标为止的距离的信息也可以从距离fft处理部11获取。物体检测部15也可以计算构成作为目标检测的物体的点的平均功率。
126.在一实施方式的电子设备1中,如上所述,假设通过配置参照区域来进行二维fft
处理,即使判定目标的存在的有无,也依然能够存在目标的误检测的情况。以下,说明这种情况。
127.例如,如图7所示,假设在距离方向上距检查区域(检查单元t)较远的一侧配置参照区域(参照单元r),并由os-cfar进行目标的检测的情况。在这种情况下,在距离fft处理部11中进行了距离fft处理之后的数字信号例如如图8所示。图8是用图表表示对差拍信号进行距离fft处理的结果的一例的图。图8所示的图表的横轴表示距电子设备1的传感器5的距离,纵轴表示接收的反射波的信号强度(功率)。
128.在图8所示的图表中,纵方向的带阴影的部分可以主要表示基于静止物体的反射波的功率。在此,静止物体例如可以是相对于搭载有电子设备1的移动体100静止的物体。例如,静止物体可以是在移动体100在地面上移动的情况下在地面上静止的物体。另外,例如,静止物体也可以是在移动体100在地面上移动的情况下以与移动体100相同的速度反方向地在地面上移动的物体。另外,在图8所示的图表中,涂黑的部分可以主要表示静止物体以外的物体的反射波的功率。
129.在此,如图8所示,在距电子设备1的传感器5的距离较远区域中进行目标的检测时,信号强度(功率)有时较低。在图8中,在距离为65m至75m的区域中,信号强度较低。这种信号强度的降低能够通过在距离fft处理部11中进行距离fft处理时使用窗函数而更显著地表示。图8示出了在距离fft处理部11中未使用窗函数进行距离fft处理的示例。另一方面,图9示出了在距离fft处理部11中使用窗函数进行距离fft处理的示例。
130.图9是用图表表示使用窗函数对差拍信号进行距离fft处理的结果的一例的图。与图8相同,图9所示的图表的横轴表示距离,纵轴表示信号强度(功率)。在图9中,显著地示出了在距离为65m至75m的区域,即距电子设备1的传感器5的距离较远区域中,信号强度较低。假设这种信号强度的降低可能是因构成如传感器5等那样的雷达传感器的硬件和/或软件的规格而引起。
131.这样,参照对应于信号强度变低的区域的参照单元r进行os-cfar处理时,阈值计算部134基于该参照单元r的值计算的阈值th也可能变低。在这种情况下,检查单元t中的信号强度的值a容易超过较低地计算的阈值th。因此,即使在对应于检查单元t的区域中实际上不存在目标,也能够产生误检测目标这样的情况。
132.图10是表示使用图7所示的参照区域(参照单元r)的二维的配置,由os-cfar进行目标的检测的结果的示例的图。图10所示的图表的横轴表示与电子设备1的传感器5的距离,纵轴表示与检测的目标之间的相对速度。图10是描绘对应于判定为检测到目标的距离以及速度的点的图。在此,说明在与电子设备1的传感器5的距离为0m至80m的范围内,不存在应检测的目标。
133.如上所述,使用图7所示的参照区域(参照单元r)的配置进行os-cfar时,如图8和图9所示,在与电子设备1的传感器5的距离较远的区域中,信号强度可变得较低。因此,如图10所示,电子设备1在与传感器5的距离较远的区域(距离为65m至75m的区域)中,判定为检测到目标。在此,由于实际上在距离为65m至75m的区域中不存在作为目标的物体,因此,这种目标的检测是误检测。
134.为了应对这种情况,一实施方式的电子设备1在目标的检测的途中,可以将如图7所示的参照区域(参照单元r)的二维的配置的模式切换为其他的配置的模式使用。例如,一
实施方式的电子设备1在与传感器5的距离较远规定的区域为止可以使用如图7所示的参照区域(参照单元r)的二维的配置的模式检测目标。另一方面,一实施方式的电子设备1可以从与传感器5的距离较远规定的区域切换至例如图11所示的参照区域(参照单元r)的二维的配置的模式来检测目标。
135.这样,一实施方式的电子设备1可以准备多个参照区域(参照单元r)的二维的配置,并切换这些来进行目标的检测。这种多个模式的切换例如可以由控制部10中的距离速度检测判定部13执行。以下,将图7所示的参照区域(参照单元r)的二维的配置的模式简称为“图7所示的模式”。另外,以下,将图11所示的参照区域(参照单元r)的二维的配置的模式也简称为“图11所示的模式”。
136.图11与图7相同,是表示一实施方式的电子设备1的移位寄存器131中的参照区域(参照单元r)的二维的配置的示例的图。在图11中也与图7相同,配置有检查单元t、保护单元g以及参照单元r,但图11所示的配置是一个示例。在图11中也与图7相同,移位寄存器131的右侧对应于距电子设备1的传感器5远的距离,移位寄存器131的左侧对应于距电子设备1的传感器5近的距离。另外,在图11中也与图7相同,移位寄存器131的上侧对应于与电子设备1的传感器5之间的相对速度快的区域,移位寄存器131的下侧对应于与电子设备1的传感器5之间的相对速度慢的区域。
137.如图11所示,一实施方式的电子设备1的移位寄存器131可以在距离方向上距检查区域(检查单元t)近的一侧配置参照区域(参照单元r)。即,一实施方式的电子设备1的移位寄存器131也可以在与距离方向上距检查区域远的一侧不配置参照区域。图11所示的移位寄存器131在对应于远的距离的区域中不配置参照区域,而在对应于近的距离的区域中配置参照区域。
138.另外,在图11所示的例中也与图7相同,也可以将参照区域(参照单元r)在距离方向上间歇地即不连续地配置。另外,在图11所示的例中也与图7的情况相同,将参照单元r在距离方向上配置的数量例如根据目标检测的方式或求出的精度等,可以是任意的。在图11所示的例中,将参照单元r在距离方向上间歇地配置的间隔例如根据目标检测的方式或求出的精度等,可以是任意的。另外,各参照单元r的距离方向的配置间隔可以是任意的间隔。各参照单元r的距离方向的配置间隔例如可以是等间隔或者每个之间分别为不同的间隔等。另外,在图11所示的情况中,一实施方式的电子设备1的移位寄存器131也可以将参照区域(参照单元r)在距离方向上间歇地配置的情况和连续地配置的情况组合来配置。即,一实施方式的电子设备1的移位寄存器131也可以将参照单元r在距离方向上连续地配置的情况和不连续地配置的情况组合来使用。
139.而且,在图11所示的例中也与图7相同,可以将参照区域(参照单元r)在速度方向上间歇地即不连续地配置。另外,在图11所示的例中也与图7的情况相同,将参照单元r在速度方向上配置的数量例如根据目标检测的方式或求出的精度等,可以是任意的。在图11所示的例中,将参照单元r在速度方向上间歇地配置的间隔例如根据目标检测的方式或求出的精度等,可以是任意的。另外,各参照单元r的速度方向的配置间隔也可以是任意的间隔。各参照单元r的速度方向的配置间隔例如可以等间隔或者每个之间分别为不同的间隔等。另外,在图11所示的情况下,一实施方式的电子设备1的移位寄存器131可以将参照区域(参照单元r)在速度方向上间歇地配置的情况和连续地配置的情况组合来配置。即,一实施方
式的电子设备1的移位寄存器131也可以将参照单元r在速度方向上连续地配置的情况和不连续地配置的情况组合来使用。
140.图11所示的检查区域(检查单元t)、保护区域(保护单元g)以及参照区域(参照单元r)的配置表示使图7所示的这些配置的左右翻转的示例。然而,图11所示的各个区域中的各个单元的配置并不限于将图11所示的配置的左右翻转的配置,也可以是各种配置。
141.另外,如图11所示,移位寄存器131与图7的情况相同,可以在距离方向上的检查单元t的两侧的保护区域分别具有保护单元g。另外,移位寄存器131可以在速度方向上的检查单元t的两侧的保护区域分别具有保护单元g。另外,在图11中也与图7所示的例相同,保护单元g沿距离方向作为在检查单元t的两侧分别连续的三个或四个单元而示出。而且,在图11中也与图7所示的例相同,保护单元g沿速度方向作为在检查单元t的两侧分别连续的两个单元而示出。然而,保护单元g的个数并不限于前述的示例,可以是任意的。
142.在图8和图9所示的例中,在与传感器5的距离为65m至75m的区域中,信号强度变得较低。因此,在一实施方式中,控制部10可以在与传感器5的距离例如为65m为止使用图7所示的模式进行目标的检测。在这种情况下,在一实施方式中,控制部10可以在从与传感器5的距离例如为65m使用图11所示的模式进行目标的检测。
143.这样,在一实施方式中,控制部10可以切换如图7所示的模式以及图11所示的模式那样的多个模式来进行目标的检测。另外,一实施方式的电子设备1在如图8和图9所示的例那样的信号强度较低的65m至75m的区域中,可以使用图11所示的模式。即,在一实施方式中,控制部10可以根据检测目标的距离,切换如图7所示的模式以及图11所示的模式那样的多个模式。
144.在使用图11所示的模式的情况下,在信号强度较低的65m至75m的区域中未配置参照单元。因此,即使在对应于信号强度变低的区域的距离中进行os-cfar处理,也能够抑制在该区域中阈值计算部134所计算的阈值th过低的情况。因此,也能够抑制检查单元t中的信号强度的值a容易超过阈值th的情况。因此,也能够抑制在对应于检查单元t的区域中不存在目标而作为目标误检测的情况。
145.图12是表示在信号强度较低的65m至75m的区域中,使用图11所示的模式由os-cfar进行目标的检测的结果的示例的图。在图12所示的图表中,与图10相同,横轴表示与电子设备1的传感器5的距离,纵轴表示与检测的目标之间的相对速度。图12也与图10相同,是描绘对应于判定为检测到目标的距离以及速度的点的图。
146.在图10所示的例中,在与传感器5的距离较远的区域(距离为65m至75m的区域)中,误检测到目标。另一方面,在图12所示的例中,可知在与传感器5的距离较远的区域(距离从65m至75m的区域)中,未误检测到目标。这样一来,根据一实施方式的电子设备1,目标的误检测被抑制。因此,根据一实施方式的电子设备1,能够提高检测目标的精度。
147.这样,在一实施方式的电子设备1中,控制部10基于作为发送波发送的发送信号以及作为反射波接收的接收信号,以恒虚警率检测目标。在这种情况下,控制部10在基于接收信号的信号强度的距离方向以及相对速度方向的二维分布中,基于参照区域(参照单元r)中的信号强度的顺序统计量,设定用于目标的检测的阈值。另外,控制部10在基于接收信号的信号强度的距离方向以及相对速度方向的二维分布中,可以切换以检查区域为基准在距离方向以及相对速度方向上间歇地设置参照区域(参照单元r)的多个模式。例如,控制部10
可以用于切换图7所示的模式和图11所示的模式。
148.这样,控制部10也可以在基于接收信号的信号强度的距离方向以及相对速度方向的二维分布中,切换设置参照区域(参照单元r)的多个模式。在此,上述的多个模式可以包含以检查区域(检查单元t)为基准在距离方向上较远的一侧以及相对速度方向上间歇地设置参照区域(参照单元r)的模式。另外,上述的多个模式可以包含以检查区域(检查单元t)为基准在所述距离方向上较近的一侧以及所述相对速度方向上间歇地设置参照区域(参照单元r)的模式。
149.另外,在一实施方式中,控制部10在基于参照区域中的信号强度的顺序统计量检测存在于比规定的基准更靠近本设备的区域(例如,如从0m至65m那样的)的目标时,例如,也可以使用图7所示的模式。即,控制部10在基于接收信号的信号强度的距离方向以及相对速度方向的二维分布中,也可以使用以检查区域(检查单元t)为基准在距离方向上较远的一侧以及相对速度方向上间歇地设置参照区域(参照单元r)的模式。
150.另一方面,在一实施方式中,控制部10在基于参照区域中的信号强度的顺序统计量检测存在于比规定的基准更远离本设备的区域(例如,比65m更远的远方)的目标时,例如也可以使用图11所示的模式。即,控制部10在基于接收信号的信号强度的距离方向以及相对速度方向的二维分布中,也可以使用以检查区域(检查单元t)为基准在距离方向上较近的一侧以及相对速度方向上间歇地设置参照区域(参照单元r)的模式。
151.在上述的实施方式中,假设并说明了例如使用图11所示的模式,作为比规定的基准更远离本设备的区域的示例,检测存在于比65m更远的远方的目标。在一实施方式中,如图8和图9所示的信号强度降低的区域能够根据雷达的结构和/或规格等而不同。因此,将比规定的基准更远离本设备的区域设定为比65m更远的远方只不过是一个示例,根据使用的雷达的硬件和/或软件等,可以适当地设定比规定的基准更远离本设备的区域。另外,在目标的检测的各周期中,比规定的基准更远离本设备的区域可以每次设定相同的区域,也可以适当地设定不同的区域。
152.另外,在上述的实施方式中,说明了根据是否检测到存在于比规定的基准更远离本设备的区域的目标,来切换设置有参照区域(参照单元r)的多个模式。在此,设置有参照区域(参照单元r)的多个模式并不限于如图7和图11所示的两个不同的模式,也可以适当地切换三个以上的模式。例如,在一实施方式中,也可以与检查区域(检查单元t)向远的距离移动的距离相对应地,切换使处于远的距离的参照区域(参照单元r)依次向接近的一侧移动的多个模式。
153.虽然基于各附图和实施例说明了本发明,但应该注意的是,本领域技术人员能够基于本发明容易地进行各种变形或修正。因此,需要注意这些变形或修正包含在本发明的范围内。例如,各功能部所包含的功能等能够以在逻辑上不矛盾的方式进行再配置。多个功能部等可以被组合为一个或者被分割。上述的本发明所涉及的各实施方式并不限定于忠实地实施于分别说明的各实施方式,能够适当地组合各特征或省略一部分来实施。即,本发明的内容只要是本领域技术人员就能够基于本发明进行各种变形以及修正。因此,这些变形和修改包括在本发明的范围内。例如,在各实施方式中,各功能部、各机构、各步骤等能够以在逻辑上不矛盾的方式追加到其他实施方式中,或者置换为其他实施方式的各功能部、各机构、各步骤等。另外,在各实施方式中,能够将多个各功能部、各机构、各步骤等组合为一
个或进行分割。另外,上述的本发明的各实施方式并不限定于忠实地实施于分别说明的各实施方式,也能够适当地组合各特征或省略一部分来实施。
154.例如,在上述的实施方式中,对通过1个传感器5动态地切换物体检测范围的方式进行了说明。然而,在一个实施方式中,也可以通过多个传感器5在确定的物体检测范围中进行物体检测。另外,在一个实施方式中,也可以通过多个传感器5向确定的物体检测范围进行波束成形。
155.上述的实施方式并不仅限定于作为电子设备1的实施方式。例如,上述的实施方式也可以作为电子设备1这样的设备的控制方法来实施。而且,例如,上述的实施方式也可以作为电子设备1这样的设备所执行的程序来实施。
156.一个实施方式的电子设备1作为最小的结构,例如可以仅具有传感器5或控制部10中的一方的至少一部分。另一方面,一个实施方式的电子设备1除了控制部10以外,可以适当构成为包含图2所示的信号生成部21、合成器22、相位控制部23、放大器24以及发送天线25中的至少一个。另外,一个实施方式的电子设备1可以构成为取代上述功能部或者与上述的功能部一起适当地包含接收天线31、lna32、混频器33、if部34、ad转换部35中的至少一个。而且,一个实施方式的电子设备1可以构成为适当地包括存储部40等。这样,一个实施方式的电子设备1能够采用各种结构方式。另外,在一个实施方式的电子设备1搭载于移动体100的情况下,例如上述各功能部的至少任一个可以设置于移动体100内部等的适当位置。另一方面,在一个实施方式中,例如发送天线25以及接收天线31中的至少任一个也可以设置于移动体100的外部。
157.附图标记的说明:
[0158]1ꢀꢀ
电子设备
[0159]5ꢀꢀ
传感器
[0160]
10
ꢀꢀ
控制部
[0161]
11
ꢀꢀ
距离fft处理部
[0162]
12
ꢀꢀ
速度fft处理部
[0163]
13
ꢀꢀ
距离速度检测判定部
[0164]
14
ꢀꢀ
到来角推定部
[0165]
15
ꢀꢀ
物体检测部
[0166]
20
ꢀꢀ
发送部
[0167]
21
ꢀꢀ
信号生成部
[0168]
22
ꢀꢀ
合成器
[0169]
23
ꢀꢀ
相位控制部
[0170]
24
ꢀꢀ
放大器
[0171]
25
ꢀꢀ
发送天线
[0172]
30
ꢀꢀ
接收部
[0173]
31
ꢀꢀ
接收天线
[0174]
32
ꢀꢀ
lna
[0175]
33
ꢀꢀ
混频器
[0176]
34
ꢀꢀ
if部
[0177]
35
ꢀꢀ
ad转换部
[0178]
40
ꢀꢀ
存储部
[0179]
50
ꢀꢀ
ecu
[0180]
100
ꢀꢀ
移动体
[0181]
131
ꢀꢀ
移位寄存器
[0182]
132
ꢀꢀ
排序部
[0183]
133
ꢀꢀ
数据选择部
[0184]
134
ꢀꢀ
阈值计算部
[0185]
135
ꢀꢀ
权重设定部
[0186]
136
ꢀꢀ
检测判定部
[0187]
200
ꢀꢀ
物体
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1