用于通过散射介质进行井下成像的系统和方法与流程
用于通过散射介质进行井下成像的系统和方法
1.相关申请的交叉引用
2.本技术要求2019年8月30日提交的标题为“systems and methods for downhole imaging through a scattering medium”的共同未决的美国专利申请序列号16/557,018的优先权和权益,该专利申请的全部公开内容以引用方式并入本文以用于所有目的。
背景技术:
3.1.技术领域
4.本公开总体涉及油气工具,尤其涉及用于通过可包括颗粒或流体的井筒流体进行的井下光学成像应用的系统和方法。
5.2.现有技术描述
6.在油气生产中,可在井下成像中利用各种工具和技术来提供用于确定井筒的一个或多个特征的信息。例如,不同的成像技术,诸如声学、电磁、核等可用于确定不同的特性,诸如电阻率、磁导率等。不同的井下成像技术可提供与诸如成本、分辨率和时间等方面相关的多种优点和缺点。另外,部署难度可在不同技术之间变化。例如,虽然光学成像技术具有比非光学技术好得多的空间分辨率和图像质量,但是由于压力、温度和整体环境,可能难以在井筒中部署光学技术。在各种实施方案中,井筒可填充有流体(例如,气体、液体、固体或其组合),该流体可衰减或散射光并且对井下光学方法造成困难。典型的声学或电钻孔成像工具的分辨率为约2.5mm至5mm,而通过处理通过散射介质获得的光学图像实现的分辨率可为大约34微米,这样好75至150倍。
7.历史上,井下光学井筒成像已经利用了三种主要技术中的一种技术:1)将透明光学窗口(或光纤)压靠在钻孔壁上作为排除高度散射钻探泥浆的泥浆排除器;2)在要光学成像的井筒壁的区段上用透明流体替换钻探泥浆;以及3)使用红外光看透原油的深色沥青质。然而,这些技术中的每一种技术具有缺点,并且它们没有一种技术提供重建通过光散射介质诸如含有悬浮固体微粒、气泡或液液乳液的钻孔流体拍摄的图像的手段。例如,泥浆排除器可能难以紧靠钻孔壁固定。例如,利用线缆应用,可能需要附加的锚定件来将窗口或纤维紧密地推压到井筒上,以实现最大程度的泥浆排除。另外,关于透明流体,可能难以将透明流体栓定位在井中的期望深度处,并且这也会破坏井场操作。通过在诸如钻探泥浆等井筒流体中散射悬浮微粒,光也被高度衰减。此类散射可容易地将光强度每毫米路径长度降低100,000或更多倍。
8.文献中的先前技术未能克服这些问题。例如,美国专利2,334,475描述了与上述技术1一致地将窗口压靠在井的壁上。类似地,美国专利2,812,697描述了根据技术2的流体的局部取代的使用。英国专利2,332,331描述了红外辐射,以使得能够通过原油的沥青质成像,原因是沥青质吸光度在更长波长下减少,然而,此类技术仍然受到任何悬浮微粒的散射。1938年提交的美国专利2,334,475描述了使用透明泥浆排除器并且使用红外光到紫外光对井筒的光学成像。正式地、“入射束和由壁发射的光被布置成穿过诸如玻璃或石英等透明材料的窗口,该窗口例如根据本发明通过适当的手段被牢固地压靠在井的壁上。美国专
利5,517,024说明钻井“液即使在大约数毫米的短距离内也是相对不透明的。即使当水或盐水用作钻井液时,钻屑和悬浮固体和地层流体的存在也使得流体实际上不透明。美国专利5,517,024提供的仅有的减轻在于相隔距离“小于一毫米”或“不存在”或使用不含任何悬浮微粒的“透光性流体诸如水或盐水”。用于钻孔的光学成像的美国专利7,646,480说明“用于检验钻孔内部的视频技术是已知的”,但是“这种方法需要井中存在透明流体,并且因此无法在其中存在不透明流体的井的钻探或生产阶段中使用。由美国专利7,646,480提供的仅有的缓解是使用“包括用于抵靠钻孔的壁施加的窗口的传感器头”,使得“传感器头被施加到钻孔壁”。美国专利公布号2011/0096622提议了用于光学不透明流体的声学成像,并且说明使用“常规光学相机...需要花费数天用清澈的水替换现有的钻井液”。美国专利9,765,609说明“在钻孔流体过于不透明的情况下,清澈流体可用于冲洗传感器正前方的区域以实现成像。”不建议在用于通过高度散射介质获得图像的算法的帮助下执行井下井筒成像,因此81年来,这在钻孔成像中一直是长久尚未满足的需求。文献中存在这些具体实施的许多其他示例。
技术实现要素:
9.申请人认识到本文上面提到的问题,并且构思和开发了根据本公开的用于井下光学成像的系统和方法的实施方案。
10.在一个实施方案中,用于井下光学成像的系统包括形成工具串的至少一部分的外壳。该系统还包括布置在外壳内的源,该源穿过在外壳中形成的窗口发射光。该系统还包括布置在外壳内的成像仪,该成像仪穿过窗口接收成像数据。该系统还包括控制系统,该控制系统通信地联接到成像仪,该控制系统使用一种或多种算法来处理图像数据,该一种或多种算法至少部分地基于围绕外壳的散射材料来修改成像数据。
11.在一个实施方案中,用于井下光学成像的方法包括将成像装置和源定位在井下工具内。该方法还包括将井下工具靠近井筒壁布置在地下地层中。该方法还包括收集图像数据,该图像数据通过定位在井下工具和井筒壁之间的散射材料诸如钻井液收集。该方法还包括使用一种或多种算法来处理图像数据,该一种或多种算法至少部分地由于散射材料调整图像数据。
12.在一个实施方案中,用于井下光学成像的系统包括形成工具串的至少一部分的外壳,该外壳布置在井筒内,该井筒包括具有悬浮微粒的流体。该系统还包括布置在外壳内的源,该源穿过在外壳中形成的窗口发射光。该系统还包括布置在外壳内的成像仪,该成像仪穿过窗口接收成像数据,该成像仪靠近源布置。该系统还包括控制系统,该控制系统适于通过用于确定通过散射材料的成像信息的一种或多种算法来处理图像数据,该一种或多种算法适于与其中成像信息至少两次行进通过散射材料的井下环境一起使用。
附图说明
13.通过阅读本技术的非限制性实施方案的以下详细描述以及查看附图,将更好地理解本技术,其中:
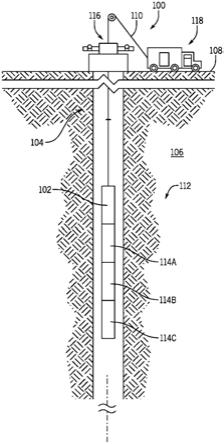
14.图1是根据本公开的实施方案的井筒系统的实施方案的示意性正视图;
15.图2是根据本公开的实施方案的布置在井筒内的井下工具的实施方案的示意性截
面图;
16.图3a-图3d是根据本公开的实施方案的用于与井下光学成像一起使用的图像数据的示例;
17.图5a-图5d是根据本公开的实施方案的用于与井下光学成像一起使用的图像数据的示例;
18.图5是根据本公开的实施方案的用于与井下光学成像一起使用的环境的示意图;并且
19.图6是根据本公开的实施方案的用于井下光学成像的方法的实施方案的流程图。
具体实施方式
20.当参考优选的实施方案的以下描述和附图进行考虑时,将进一步理解本技术的前述方面、特征和优点,其中类似的附图标记表示类似的元件。在描述附图中示出的技术的优选实施方案时,为了清楚起见,将使用特定术语。然而,本技术不旨在限于所使用的特定术语,并且应当理解,每个特定术语包括以相似方式操作以实现相似目的的等同物。
21.当介绍本发明的各种实施方案的元件时,冠词“一”、“一个”、“该”和“所述”旨在意味着存在一个或多个元件。术语“包括”、“包含”和“具有”旨在是包括性的并且意味着除所列元件外还可以有附加元件。工作参数和/或环境条件的任何示例并不排除所公开的实施方案的其它参数/条件。另外,应当理解,对本发明的“一个实施方案”、“实施方案”、“某些实施方案”或“其他实施方案”的引用不旨在被解释为排除也包含所引用的特征的附加实施方案的存在。此外,对关于取向的术语诸如“上方”、“下方”、“上部”、“下部”、“侧面”、“前部”、“后部”或其他术语的引用是参考所示的实施方案进行的,并且不旨在限制或排除其他取向。
22.本公开的实施方案涉及用于井下光学成像以确定钻孔壁或地层的一个或多个特性的系统和方法。在各种实施方案中,光学成像可在填充有散射介质诸如可包含微粒的基本上不透明的流体的钻孔中执行。散射介质可通过多种相互作用诸如吸收、反射、散射等对光学信号(例如,光)产生负面影响。即使在存在散射介质的情况下,本公开的实施方案便于成像信息的收集。然后可例如使用时间门控或散斑相关性算法来分析图像信息。仅通过示例,时间门控可用于评估某些类型的光子,诸如弹道光子,或者在一定时间段内评估数据收集,以便基于不太散射的光子将更早到达它们的目的地的概念确定图像信息。弹道光子是尚未散射但已经采取直线路径的光子,该直线路径是最短路径,因此它们会首先到达。接下来到达的光子已经历了一些散射,依此类推。组合来自所有时间帧的数据重建被成像的原始对象。在时间门控方法中,光子可由激光器在短时间突发内发射,其中突发的时间限定时间零点。在另一示例中,散斑相关性可评估散斑图案,并且通过相关性算法来重建原始图像。例如,当光束(例如,光子)通过散射材料被漫反射时,可观察到看似随机的颗粒状图案。散斑相关性利用自相关和相位检索算法,这些算法可包括受训练的神经网络等,以校正颗粒状图案并且将这些颗粒状图案重建成原始图像。
23.在本公开的各种实施方案中,系统和方法可部署在井下环境中,诸如在井筒内。因此,可特别选择系统的部件以在高温和/或高压环境中使用。此外,在各种实施方案中,系统和方法可用于减少散射材料的量或减少源和/或成像仪和钻孔壁诸如光学窗口延伸部等之
间的距离。
24.在各种实施方案中,光学成像数据提供更高分辨率图像以供稍后评估,从而使得能够检测非常规贮存器中的细裂缝。其还使得地质学家能够查看和解译低于声学或电成像工具的分辨率的细地质特征。此外,本发明应用的系统和方法解决了由于以下项引起的与通过散射流体诸如钻探泥浆进行成像相关联的两个障碍:1)泥浆中的悬浮固体微粒(或者通过气泡或通过液液乳液)进行的光学散射,和2)已经有意添加或在钻探穿过含有沥青质和树脂的各种岩石层时意外聚积的这些混合物进行的光学吸收,尤其是在油基泥浆中。为了解决这些问题,本公开的实施方案可包括测井工具上的垫装置,以减小成像仪和钻孔壁之间的泥浆厚度(例如,约2mm-3mm或更小)。另外,本公开的实施方案的源可为近红外光(例如,整合1300nm和2000nm之间的所有光),该光被沥青质和树脂吸收地少得多,但在井筒流体中存在少量可见光吸收剂诸如沥青质时可使用可见光。此外,针对光学成像开发的算法可用本公开的实施方案来部署。
25.图1是井筒系统100的实施方案的示意性侧视图,该井筒系统包括工具102(其可为工具串的一部分),该工具从地表位置108下降至地层106中形成的井筒104中。所示的井筒104可被称为开孔,原因是沿着井筒壁未示出壳体。然而,应当了解,其他井筒诸如下套管井筒也可利用本公开的实施方案。在下套管井筒中,壳体可沿着井筒壁的至少一部分安装并且胶合在适当位置,从而沿着井筒壁形成屏障。在实施方案中,可穿透壳体以便于从井筒中回收流体诸如烃。此外,在各种实施方案中,井筒104可填充有流体,诸如钻井液、烃、盐水、它们的组合等。此外,应当了解,其他部件也可布置在井筒104内,并且图1的实施方案仅用于说明性目的。例如,井筒104还可包括塞或补救装备。所示的井筒系统100可被称为线缆系统,原因是工具102在缆线110上输送,诸如电气线缆,但该系统也可部署在钻柱上以用于在钻探时进行测量。在各种实施方案中,电气线缆可将电信号和/或能量从地表位置108传输到井筒104中,例如以为工具102提供操作功率和/或传输数据,诸如从布置在工具102上的传感器获得的数据。在各种实施方案中,工具102可用于执行井下测井操作,并且可为成像工具、电阻率工具、核工具或可用于井下环境中的任何其他测井工具。此外,在各种实施方案中,工具102可包括其中的多个测井或成像工具。为简单起见,将参考工具102描述本文所述的所有测井或成像工具。然而,在各种实施方案中,可使用不同工具102在不同时间获得从各种工具获得的日志或图像。
26.如上所述,在各种实施方案中,工具102可为工具串112的一部分,该工具串可包括用于井筒操作的各种部件。例如,工具串112可包括各种其他工具114a-114c,这些工具可包括传感器、测量装置、通信装置等,为了清楚起见将不会对所有这些进行描述。在各种实施方案中,工具串112可包括一个或多个工具以实现测井操作、穿透操作或井介入中的至少一者。例如,可在测井操作中利用核测井工具、声学成像工具、光学成像工具、流体采样工具、岩心采样装置等。所公开实施方案在一个井中获得的高分辨率光学图像与在同一井中获得的对应更低分辨率声学或电图像其他测井数据之间的相关性可用于解译在尚未在其中获得光学图像的跨同一地质地层的相邻井中获得的历史声学或电图像或其他测井数据。穿透操作可包括将弹道装置下降至井筒中以穿透壳体或地层。此外,井介入可包括与分析井筒的一个或多个特征并且响应于那些特征继续执行一个或多个任务诸如数据采集过程、切割过程、清洁过程、堵塞过程和检验过程等相关的操作。因此,在各种实施方案中,工具串112
可指代下降至井筒中的工具。另外,也可将用于便于工具串112等的移动的被动装置诸如扶正器或稳定器、牵引器结合到工具串112中。
27.在各种实施方案中,可通过本公开的实施方案利用不同的功率和/或数据传导工具,以便发送和接收信号和/或电功率。如下文将描述的,在各种实施方案中,传感器可结合到工具串112的各种部件中,并且可例如通过经缆线110的通信、泥浆脉冲遥测、无线通信、有线钻管等与地表或其他工具串部件通信。此外,应当了解,虽然各种实施方案包括线缆系统,但是在其他实施方案中,刚性钻管、盘绕管件或任何其他井下勘探和生产方法可与本公开的实施方案一起利用。
28.井筒系统100包括井筒104的开口处示出的井口组件116,以提供对井筒的压力控制并且允许装备诸如缆线110和工具串112进入井筒104。在各种实施方案中,井口组件116可包括防喷器(bop)。在该示例中,缆线110是从服务车118缠绕的线缆。所示的线缆110向下延伸到工具串112的端部。在操作中,当工具串112下降至井筒104中例如达到预定深度时,可向缆线110提供松弛。在各种实施方案中,例如在重力可能不足的情况下,诸如在偏离的井筒中,可将流体递送到井筒104中以驱动工具串112的移动。例如,地表处的流体泵送系统(未示出)可通过供应管线或导管将流体从源泵送到井筒104中。为了控制井下组件的行进速率,在地表上的绞盘处控制线缆110上的张力,该绞盘可为服务车118的一部分。因此,流体流动速率和线缆上的张力的组合可有助于工具串112进入井筒104的行进速率或穿透速率。缆线110可为装甲缆线,该装甲缆线包括用于向井下装置供应电能(功率)的导体,以及用于在井下工具和地表装置之间提供双向通信的通信链路。此外,在各种实施方案中,工具诸如牵引器等可进一步沿着工具柱112设置,以便于工具串112移动到井筒104中。此后,在各种实施方案中,可通过经服务车118向上卷绕缆线110来从井筒14中取出工具串112。以此方式,可在工具串112被带到地表108时执行测井操作。
29.在操作中,可利用各种测井技术以便获得一个或多个地层特性,以向操作员提供用于烃回收的信息。例如,沿着井筒壁对细裂缝的检测可指示水力压裂操作可用于沿着这些裂缝生成流动路径。然而,许多测井技术提供低分辨率图像,这可能难以分析和检测一个或多个地层特征,诸如细裂缝,但光学成像却能够检测到该一个或多个地层特征。因此,本公开的实施方案可部署光学成像技术,该光学成像技术利用一种或多种算法来便于通过散射材料诸如井筒内存在的流体的光学成像。在使地层破裂之后并且在使用支撑剂之后光学成像也可用于查看支撑剂在使裂缝保持开放时的破裂和有效性。光学成像技术可包括特别选择用于与高温和高压井筒环境一起使用的装备。此外,光学成像技术可通过以下方式来克服现有技术的缺陷:通过散射材料成像,使用在存在烃的情况下可能具有减少的吸光度的光源,并且整合机器学习技术来评估和分析。
30.图2是井下环境200的实施方案的示意性剖视图,该井下环境包括询问井筒206的井筒壁204的成像工具202。在各种实施方案中,成像工具202可形成工具串112的至少一部分,并且通过缆线110在线缆操作中输送到井筒206中。应当了解,井下环境200可经受高温和高压,并且因此可特别选择成像工具202的部件诸如外壳208、窗口210等以适应环境。在各种实施方案中,窗口210包含透明或半透明材料,以便于通过源212对井筒壁204的询问以及还有通过成像仪214对成像信息的接收。在各种实施方案中,源212包括发射近红外光诸如波长为约1300nm和2000nm的光的光源。源212可发射穿过窗口210行进并且进入定位在井
筒206内的散射材料218的束216。在各种实施方案中,散射材料218可为井筒环内的流体,并且可包括固体、液体、气体或它们的组合。例如,在所示的实施方案中,散射材料218包括悬浮颗粒220。在各种实施方案中,散射材料218还可包括具有多种不同组合物的流体,诸如烃、水、盐水等。
31.所示的束216进入散射材料218并且可能由于与散射材料218的分量的相互作用而偏转。例如,由于散射材料218,第一偏转束222和第二偏转束224提供所示的潜在相互作用。因此,成像信息(例如,由于井筒壁204的询问而获取的数据)可能响应于所偏转的束是模糊的或在其他方面干扰的。然而,在某些实施方案中,束216可包括直路径束226,该直路径束可包括束216内的到达井筒壁204而在散射材料218内没有相互作用(或有最小的相互作用)的光子。在各种实施方案中,这些可被称为弹道光子。如下文将描述的,在时间门控数据收集中,弹道光子可首先到达井筒壁204,并且因此在某个时间段内收集的数据可与弹道光子具有高相关性。束216可从井筒壁204反射并且返回到成像仪214。在各种实施方案中,成像仪214是电耦装置图像传感器、互补金属氧化物半导体图像传感器等。成像仪214接收反射束,并且因此可相对于井筒壁204获取图像信息。如上所述,散射材料218内的不同类型的反应可能会影响所接收的信息的类型。例如,反射直路径束228可能不经历与散射材料218的相互作用(或有限的相互作用),而第三偏转光束230可与散射材料218相互作用。
32.在所示的实施方案中,散射距离232表示从窗口210到井筒壁204的径向距离。散射距离232可被认为是束216或其分量行进以与井筒壁204相互作用的距离。然而,由于源212和成像仪214在所示的实施方案中彼此靠近布置,因此束216所横穿的总距离及其反射信息等于散射距离232的两倍。因此,应当了解,由于高数量的潜在散射相互作用,因此直路径束226光子和反射直路径束228光子的数量可能是较低的。因此,可利用不同的时间段、源数量等以便提供足够的信息用于捕获和分析。
33.在操作中,信号可例如从本地或远程控制器传输到源212,以利用束216询问井筒壁204。在各种实施方案中,源212可发射定时束,该定时束可与下面描述的时间门控方法相对应。此外,如上所述,可存在可一起操作或独立操作的多个源212。成像仪214可接收图像信息,该图像信息可具有相关联时间戳或其他指定信息。此后,可处理图像信息以便开发对应于井筒壁204的图像。例如,如下文将描述,可评估弹道光子以便标识井筒壁的一个或多个特征。另外,各种算法可用于从散斑信息重建井筒壁的图像信息。因此,可利用井下光学成像技术获取高分辨率信息,其中散射材料存在于井筒内并且沿着光源的路径。
34.图3a-图3d是可使用本公开的系统和方法分析的示例钻孔壁图像。如上所述,在各种实施方案中,源212可朝向井筒壁204发射束216,并且可通过成像仪214记录图像信息。在所示的实施方案中,图3a是井筒壁204的示例300。如图所示,壁204包括沿着壁204的一部分延伸的裂缝302。裂缝的标识可用于井筒操作,原因是裂缝可指示用于井增产技术诸如水力压裂的潜在区域。因此,与井筒壁204的外观相关的图像信息对于生产者可能是有利的。然而,图3a的实施方案难以在井筒环境中使用光学成像来确定。例如,如上所述,散射材料218可引起束216的散射,这减少了获得成像信息的可能性。然而,本公开的实施方案可利用时间门控方法,以便在一定时间段内评估图像信息以便重建井筒壁的视图。
35.图3b是利用时间门控以便检测弹道光子的与裂缝302相关的图像数据306的实施方案的示例304,该弹道光子可能不会经受散射。由于弹道光子由于没有散射而首先到达,
因此可对成像仪进行时间门控以便隔离和/或基本上评估与基本上所有弹道光子相关的图像数据。在各种实施方案中,可利用诸如超快扫描相机或kerr单元门等系统和方法以便对图像数据306进行时间门控以便评估弹道光子。如图所示,图像数据306包括基本上符合裂缝302的轮廓308。然而,应当了解,在各种实施方案中,在对应于图像数据306的时间门控期间也可获取微量散射。此外,在各种实施方案中,不会经历散射的光子的数量可为较低的,并且因此可获取多个不同的图像数据集。例如,源212可发射具有在突发之后的一定时间段内获取的对应图像数据的多个突发。在高度散射介质中,获得图像数据的时间量可能是不期望的。因此,实施方案可进一步利用算法来利用剩余图像数据以获得对应于裂缝302的最终图像数据。
36.图3c是对应于时间平均图像的图像数据312的示例310。例如,时间平均图像包括由成像仪214获取的所有或基本上所有信息。例如,在各种实施方案中,源212可发射能量突发(例如,光),并且成像仪214可获得信息。先前描述的时间门控数据可对应于未经历或基本上未经历散射并且因此首先到达成像仪214的弹道光子。然而,随后的时间门控可用于评估已经经历略少的散射的光子,并且在一段时间内可对信息进行平均以进一步获得裂缝302的一般轮廓。当与来自图3b的图像数据306相比时,图3c的图像数据312不太精炼和/或具有更多干扰,这是光子散射的结果。换句话说,如果光子可表示为在平面上相互作用的圆,则每个后续的散射事件和时间门控将具有略微更大的重叠圆。因此,编译数据可得到具有低于可接受的预定阈值的清晰度或分辨率的图像。然而,可例如通过算法利用和处理信息以获得附加图像信息进行评估。
37.图3d是在利用确定图像数据316的像素内的各种光子的起源的算法进行处理之后的图像数据316的示例314。在某些实施方案中,算法可利用级联概率,诸如2016年9月29日由guy satat等人在“all photons imaging through volumetric scattering”中描述的算法,其以引用方式并入本文。算法可评估随时间的变化以估计散射。例如,较大强度减小可表示较低散射,而渐进强度减小可表示较高散射。此后,评估可各自单独时间门控的连续帧以确定连续帧之间的对应概率。算法还可预测后续帧和稍后的帧以对预测并且对模型进行调整。此后,可提供最终光图案,该最终光图案可对应于图3d的图像数据316。应当了解,算法可为机器学习过程诸如受训练的神经网络的一部分。
38.如图所示,当比较图3a和图3d的图像数据时存在差异。例如,可能不捕获某些细节,然而,可在通过算法处理之后示出裂缝302的总体布置。在某些实施方案中,可在输出之前针对置信度阈值评估图像数据316,以确定图像数据316对应于准确表示的可能性。有利地,可在井下环境内获得光学图像,并且没有与尝试隔离或以其他方式分离区域以用于成像相关联的挑战。
39.本公开的系统和方法还可包括或在替代形式中利用散斑相关性,以便评估对应于通过散射材料进行井下光学成像的图像数据。如上所述,在各种实施方案中,散斑相关性利用以下原理:来自物体上的附近点的光通过散射材料散射以产生高相关但移位的随机散斑图案。因此,本公开的实施方案涉及图像数据的自相关和重建,以说明所移位的随机散斑图案。
40.图4a-图4d是可使用本公开的系统和方法分析的示例钻孔壁图像。如上所述,在各种实施方案中,源212可朝向井筒壁204发射束216,并且可通过成像仪214记录图像信息。在
所示的实施方案中,图4a的示例400表示沿着井筒壁204的裂缝402。然而,由于上述原因,至少由于散射材料和与井下环境中的光学成像相关联的其他特性和挑战,获得对应于示例400的图像数据可能是困难的。图4b示出了图像数据406的示例404,该示例也可被称为原始相机图像。如图所示,裂缝402的特征在图像数据406中不可识别,并且因此这种图像对于井下井筒操作没有价值,原因是该信息可能不会向生产者提供关于井筒操作的方向或指导。因此,本公开的系统和方法可用于从图像数据406提取指示裂缝402的信息。
41.图4c示出了来自自相关过程的图像数据410的示例408,其中处理图4b的图像数据406以提取一个或多个特征以确定能量源(例如,光子)。在各种实施方案中,可评估测试数据(例如,地面实况数据)以确定自相关信息,该自相关信息接着可与自相关数据一起用于与井筒相关联的图像。如由katz等人在“non-invasive real-time imaging through scattering layers and around corners via speckle correlations”中描述的,其以引用方式并入本文,用于通过散射材料进行成像的自相关与对象的自相关实质上相同。因此,各种算法诸如迭代fienup型算法可用于生成与自相关相关的图像数据310。
42.图4d示出了在通过一种或多种词组检索算法处理之后图像数据414的示例412。词组检索指代标识满足测量振幅的一组约束的相位的算法过程。在各种实施方案中,可利用混合输入-输出算法。在处理之后,图像数据414具有与裂缝402的相关性。因此,即使在散射材料存在的情况下,各种处理算法也可用于提取图像信息以生成图像数据。
43.图5是可与本公开的实施方案一起使用的实施方案环境500的框图。应当了解,虽然各种部件可作为单独的来执行,但是在各种实施方案中,不同部件可集成到一个部件中。例如,井下系统502和分析系统504被示出为单独的部件,但是在实施方案中,分析系统504可集成到井下系统502中,使得图像数据的分析可实时地或接近实时地执行。所示的井下系统包括源212和成像仪214。如上所述,源212可在各个时间并且在不同持续时间内发射近红外光,以为询问井筒壁提供照明。成像仪214可包括相机,该相机可为高速相机等,该相机可接收和处理图像数据。进一步示出了通信系统506,该通信系统可例如通过分析系统504的第二通信系统508在井下系统502和分析系统504之间提供通信。在某些实施方案中,相应通信系统506、508可包括有线或无线通信协议,诸如wi-fi、以太网、串行连接等。例如,通信可包括移除成像仪214的存储的存储器并且将该存储的存储器连接到分析系统504。因此,通信系统506、508便于井下系统502和分析系统504之间的数据和指令的通信。
44.在所示的实施方案中,分析系统504包括控制器510,该控制器包括存储器512和处理器514。过程514可执行存储在存储器512上的指令以便于井下系统502和/或分析系统504的操作。此外,定时器516可用于上述时间门控分析。定时器516可用于例如将信号发送到源212以在预定时间段内询问井筒壁。另外,定时器516可确定成像仪214接收图像数据的时间段,该图像数据可用于例如时间门控分析以确定弹道光子。因此,在各种实施方案中,分析系统504可用于将指令传输到井下系统502以获得图像数据。
45.图5中进一步示出了机器学习系统518,该机器学习系统结合了图像生成器520,该图像生成器可用于在处理之后生成图像以用于评估。例如,在各种实施方案中,机器学习系统518可结合神经网络,诸如卷积神经网络,该神经网络可使用来自训练数据库522的地面实况数据来训练。例如,训练数据库可包括可与上述自相关或相位检索步骤一起使用的散斑相关性图像。所示出的机器学习系统518还包括自相关模块524、相位检索模块526和时间
平均模块528和原点模块530。在实施方案中,模块中的一个或多个模块可用于处理信息。例如,关于时间门控分析,可将弹道光子与时间平均光子一起评估,以便通过确定光子的原点来生成图像,如上所述。此外,关于上述散斑相关性,可结合相位检索算法利用自相关过程,以便生成图像数据。以此方式,机器学习系统可结合到井下成像分析中,以实现井筒壁的各种特征的标识和成像。
46.图6是用于执行井下成像操作的方法600的实施方案的流程图。应当了解,除非另外特别说明,否则该方法的步骤可以任何顺序或并行执行。此外,在实施方案中,可存在更多或更少的步骤。图6的方法600开始于将成像装置和源定位在井下工具802中。例如,如上所述,源可包括光源,并且成像装置可包括相机。井下工具被下降至井筒中并且靠近井筒壁804布置。在各种实施方案中,井下工具可为将不同部件定位在沿着井筒的各种位置处的线缆工具串或钻柱的一部分。可806收集图像数据。例如,源可照亮井筒壁的一部分,该照亮可通过散射材料,并且成像数据可由成像装置收集。在各种实施方案中,可处理808成像数据。数据可实时或接近实时或稍后处理。处理可包括利用上述一种或多种算法来评估由于散射材料引起的光子的散射。处理步骤可生成指示井筒壁的图像数据,该图像数据可用于标识井筒壁810的一个或多个特征。
47.应当了解,实施方案要求使用物理操作设备对地质地层执行一个或多个物理操作,该物理操作设备可实现图像数据的收集。为了支持本文的教导内容,可使用各种分析部件,包括数字系统和/或模拟系统。例如,井下传感器、井下电子器件、井下工具和/或地表计算机处理系统可包括数字和/或模拟系统。这些系统可具有诸如处理器、存储介质、存储器、输入、输出、通信链路(有线、无线、光学或其他)、用户界面(例如,显示器或打印机)、软件程序、信号处理器(数字或模拟)的部件以及其他此类部件(诸如电阻器、电容器、电感器等),用于以本领域熟知的若干方式中的任一种来提供对本文所公开的设备和方法的操作和分析。可认为,这些教导内容可但不必结合存储在非暂态计算机可读介质上的计算机可执行指令集来实现,该非暂态计算机可读介质包括存储器(rom、ram)、光学介质(cd-rom)或磁性介质(例如,磁盘、硬盘驱动器)或任何其他类型的介质,这些计算机可执行指令在被执行时,致使计算机实现本发明的方法。除了本公开中所描述的功能之外,这些指令还可提供系统设计者、所有者、用户或其他此类人员认为相关的装备操作、控制、数据收集、分析和其他功能。此外,可包括各种其他部件,并要求它们提供本文教导内容的各方面。例如,可包括电源(发电机、远程供电装置和电池中的至少一者)、磁体、电磁体、传感器、电极、发射器、接收器、收发器、天线、控制器、光学单元、电单元或机电单元以支持本文所讨论的各个方面或支持本公开以外的其他功能。
48.还可根据以下条款描述实施方案:
49.1.一种用于井下光学成像的系统,该系统包括:
50.外壳,该外壳形成工具串的至少一部分;
51.源,该源布置在外壳内,该源穿过在外壳中形成的窗口发射光;
52.成像仪,该成像仪布置在外壳内,该成像仪穿过窗口接收成像数据;和
53.控制系统,该控制系统通信地联接到成像仪,该控制系统使用一种或多种算法来处理图像数据,该一种或多种算法至少部分地基于围绕外壳的散射材料来修改成像数据。
54.2.根据权利要求1所述的系统,其中外壳部署在线缆上。
55.3.根据权利要求1所述的系统,其中一种或多种算法包括时间门控操作和散斑相关性中的至少一者。
56.4.根据权利要求1所述的系统,该系统还包括:
57.机器学习系统,该机器学习系统被训练来标识对应于不存在散射介质的情况下的图像数据的第一散斑图像数据和对应于存在该散射介质的情况下的图像数据的第二散斑图像数据之间的一个或多个自相关。
58.5.根据权利要求1所述的系统,该系统还包括:
59.定时器,该定时器将图像数据捕获限制到预定时间段,该预定时间段对应于弹道光子。
60.6.根据权利要求1所述的系统,其中外壳定位在井筒内,并且散射材料是钻井液、颗粒物质或它们的组合。
61.7.根据权利要求1所述的系统,其中由源发射的光是近红外光。
62.8.一种用于井下光学成像的方法,该方法包括:
63.将成像装置和源定位在井下工具内;
64.将井下工具靠近井筒壁布置在地下地层中;
65.收集图像数据,该图像数据通过定位在井下工具和井筒壁之间的散射材料收集;以及
66.使用一种或多种算法来处理图像数据,该一种或多种算法至少部分地基于散射材料调整图像数据。
67.9.根据权利要求8所述的方法,其中图像数据至少部分地包括散斑图像数据。
68.10.根据权利要求9所述的方法,其中处理图像数据还包括:
69.确定图像数据和参考图像数据之间的自相关;以及
70.至少部分地基于相位检索算法来确定图像数据的相位。
71.11.根据权利要求8所述的方法,其中收集图像数据还包括:
72.在第一时间段内收集第一图像数据,该第一图像数据对应于弹道光子;以及
73.在第二时间段内收集第二图像数据,该第二图像数据对应于散射光子。
74.12.根据权利要求11所述的方法,其中处理图像数据还包括:
75.至少部分地基于第一图像数据来确定第一图像;
76.至少部分地基于第二图像数据来确定第二图像,该第二图像对应于时间平均组成;以及
77.确定第一图像数据和第二图像数据的原点。
78.13.根据权利要求8所述的方法,其中源和成像仪布置在井筒壁的同一侧上。
79.14.根据权利要求8所述的方法,该方法还包括:
80.从源朝向井筒壁发射近红外光。
81.15.根据权利要求8所述的方法,该方法还包括:
82.至少部分地基于所处理的图像数据来确定井筒壁的一个或多个特征。
83.16.一种用于井下光学成像的系统,该系统包括:
84.外壳,该外壳形成工具串的至少一部分,该外壳布置在井筒内,该井筒包括具有悬浮微粒的流体;
85.源,该源布置在外壳内,该源穿过在外壳中形成的窗口发射光;
86.成像仪,该成像仪布置在外壳内,该成像仪穿过窗口接收成像数据,该成像仪靠近源布置;和
87.控制系统,该控制系统适于通过用于确定通过散射材料的成像信息的一种或多种算法来处理图像数据,该一种或多种算法适于与其中成像信息至少两次行进通过散射材料的井下环境一起使用。
88.17.根据权利要求16所述的系统,其中外壳部署在线缆上。
89.18.根据权利要求16所述的系统,其中源和成像仪中的至少一者能够移动到比外壳更靠近井筒壁的位置。
90.19.根据权利要求16所述的系统,其中由源发射的光是近红外光。
91.20.根据权利要求1所述的系统,其中一种或多种算法包括时间门控运算和散斑相关性中的至少一者。
92.尽管已经参考特定的实施方案描述了本文的技术,但应当理解,这些实施方案仅是本技术的原理和应用的说明。因此,应当理解,在不脱离由所附权利要求限定的本技术的实质和范围的情况下,可以对示例性实施方案进行多种修改并且可以设计其他布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1