基于光检测和测距的通信的制作方法
基于光检测和测距的通信
1.相关申请的交叉引用
2.本技术要求2019年7月2日提交的美国专利申请第16/502,008号的优先权,其内容通过引用整体并入本文。
技术领域
3.本公开总体上涉及lidar设备,并且具体地涉及在自驾驶(self-driving)应用中使用lidar作为通信通道。
背景技术:
4.光检测和测距(lidar)设备可用于检测环境中的对象。例如,载具可以包括或耦合到一个或多个lidar设备以检测例如载具、行人、交通信号、障碍物等。lidar设备以特定频率(例如在800-1000nm或在1550nm)发射光,并且lidar设备接收发射光的反射。然后,lidar设备确定光的飞行时间(tof),以在扫描环境时估计多个反射表面的距离。估计的距离可用于生成环境的点云表示或以其他方式用于渲染环境或辅助载具操作。
5.例如,载具可以被配置为在自主模式下操作,在该自主模式下,载具在很少或没有来自驾驶员的输入的情况下导航通过环境。自主载具可以包括一个或多个lidar设备以确定环境中对象的距离,并且距离可以用于控制载具的导航。在另一个示例中,载具可以包括一个或多个lidar设备以在以下方面辅助驾驶员:例如,执行自适应巡航控制、提供交叉交通警告、提供车道偏离警告等、一直到在全自主系统中执行所有安全性关键的驾驶功能并监视道路状况。
技术实现要素:
6.提供本概述是为了以简化的形式介绍一系列概念,这些概念将在下面的详细描述中进一步描述。本概述并非旨在识别所要求保护的主题的关键特征或基本特征,也不旨在限制所要求保护的主题的范围。
7.可以针对耦合到一个或多个lidar设备的设备实现本公开中描述的主题的创新方面。在一些实现方式中,示例设备包括一个或多个处理器和耦合到该一个或多个处理器的存储器。存储器包括指令,所述当由一个或多个处理器执行时使设备:接收与由第一lidar设备的发送器发射且由耦合到载具和所述设备的第二lidar设备的接收器接收的调制光信号相关联的数据;基于来自耦合到所述载具的一个或多个lidar设备的信息生成所述载具的环境的渲染;以及基于接收的数据更新所述渲染。更新所述渲染包括更新所述载具的环境中的对象的对象渲染。所述指令使设备提供更新的渲染以在耦合到所述载具的显示器上显示。
8.可以在计算机可读介质中实现本公开描述的主题的创新方面。计算机可读介质存储指令,所述指令当由设备的一个或多个处理器执行时使设备:接收与由第一lidar设备的发送器发射且由耦合到载具和所述设备的第二lidar设备的接收器接收的调制光信号相关
联的数据;基于来自耦合到所述载具的一个或多个lidar设备的信息生成所述载具的环境的渲染;以及基于接收的数据更新所述渲染。更新所述渲染包括更新所述载具的环境中的对象的对象渲染。所述指令使设备提供更新的渲染以在耦合到所述载具的显示器上显示。
9.本公开中描述的主题的创新方面可以被实现为方法。示例方法包括:由设备接收与由第一lidar设备的发送器发射且由耦合到载具和所述设备的第二lidar设备的接收器接收的调制光信号相关联的数据;基于来自耦合到所述载具的一个或多个lidar设备的信息生成所述载具的环境的渲染;以及基于接收的数据更新所述渲染。更新所述渲染包括更新所述载具的环境中的对象的对象渲染。该方法还包括提供更新的渲染以在耦合到所述载具的显示器上显示。
10.另一示例设备可以包括一个或多个处理器和耦合到一个或多个处理器的存储器。存储器包括指令,所述指令在被一个或多个处理器执行时使设备:接收与由第一lidar设备的发送器发射且由耦合到基础设施(比如收费亭、道路施工区、隧道入口等)和所述设备的第二lidar设备的接收器接收的调制光信号相关联的数据。设备可以基于来自耦合到基础设施的一个或多个lidar设备的信息生成基础设施环境的渲染。设备还可以基于接收的数据更新渲染。更新渲染可以包括更新基础设施的环境中对象的对象渲染。设备还可以提供更新的渲染以用于显示。例如,可以针对收费亭服务员、中央交通办公室审计员、建筑场地的建筑工人工头等显示渲染。
11.数据可以包括环境中对象的指示,并且更新对象渲染可以包括在显示期间突出显示对象渲染,调整对象渲染的纹理,在环境的渲染中包括对象的代表性图像,和/或调整对象渲染的尺寸(dimension)。显示更新的渲染可以包括向观看者通知基础设施的环境中的对象是紧急载具。
12.设备还可以基于接收的数据针对基础设施的环境中的一个或多个载具确定导航操作,并且设备可将调整的导航操作提供给一个或多个载具。可通过在通信模式下操作的第二lidar设备接收调制光信号,并且基础设施的环境中的对象和第二lidar设备的视线可由在检测模式下操作的第二lidar设备感测。
13.设备还可接收与由第二lidar设备接收的第二调制光信号相关联的第二数据,并基于接收到的第二数据更新本地数据库中的一个或多个条目。在一些实现方式中,设备可以将关于更新的数据发送至其他lidar设备以更新其他lidar设备本地的数据库。
14.在附图和以下描述中阐述本公开中描述的主题的一个或多个实现方式的细节。从描述、附图和权利要求书中,其他特征、方面和优点将是明显的。注意,以下图中的相对尺寸可能不按比例绘制。
附图说明
15.图1是示例lidar设备的框图。
16.图2a示出环境中的示例lidar设备。
17.图2b是对应于示例lidar设备的发射光脉冲和接收光脉冲的波形的示例定时图。
18.图3示出基于示例通信协议来自lidar传输的多个接收的分组的示例分组格式。
19.图4示出包括自主车队载具(autonomous fleet vehicle)在不使用时返回的示例停车空间(parking space)的环境。
20.图5示出用于将救护车的存在传达给环境中另一载具的示例环境。
21.图6a示出载具的示例环境。
22.图6b示出由lidar设备感测的载具的环境的示例渲染。
23.图6c示出包括紧急载具的载具的示例环境。
24.图6d示出由lidar设备感测的图6c中的载具的环境的示例渲染。
25.图7示出了描绘用于调整lidar设备的环境的渲染的示例操作的流程图。
26.图8示出图6a中的环境的示例调整后的渲染。
27.图9a示出图6a中的环境的示例渲染,其中环境中的两个载具属于同一车队。
28.图9b示出图6c中的环境的示例渲染,其中环境包括紧急载具。
29.图10示出了描绘如下示例操作的流程图,该示例操作用于基于从lidar发送器进行的发送中接收的数据执行一个或多个操作。
30.各个附图中相同的附图标记和名称指示相同的元件。
具体实施方式
31.已经努力经由蜂窝通信来耦合载具和基础设施。例如,一些载具包括蜂窝调制器,以通过5ghz无线电频谱与其他载具或设备通信。在另一示例中,载具可配备有专用短程通信(dsrc)设备以通过5.9ghz无线电频谱与其他载具或设备通信。用于通信的蜂窝或无线电技术的一个问题是载具可能需要蜂窝连接或需要另一载具或基础设施配备有一致的通信技术。例如,一些农村环境或饱和的城市环境可能不包括可用的蜂窝连接,并且载具可能无法通过其蜂窝调制解调器与其他载具通信。用于通信的蜂窝技术的另一个问题是与通信相关联的固有延迟。例如,载具之间的蜂窝通信可能需要通过蜂窝网络的一个或多个基站进行通信,这可能会延迟通信。此外,用于通信的无线电信号的波长限制了通信带宽。此外,蜂窝和无线电信号通常是全向传输的,并且通过空中传输多个全向信号会迅速使环境饱和。
32.许多载具和基础设施(例如收费亭、交通信号、充电站等)可以包括或耦合到一个或多个lidar设备。此外,随着自主载具变得越来越普遍,配备的lidar设备也将变得越来越普遍。在一些方面,除了执行tof测量(用于检测环境中的表面)之外,lidar设备可以被配置为与其他lidar设备通信。由于发射的光信号具有比无线电信号更高的频率,因此lidar设备之间的通信可能具有比蜂窝通信更高的通信带宽。此外,lidar设备之间的通信不需要蜂窝网络或其他基础设施。此外,光信号(例如波长接近1000nm的信号)可以以聚焦色散模式发射,以防止同时在空中传输的多个光信号的饱和和干扰。
33.本文所述主题的实现方式可以允许lidar设备与另一个lidar设备通信(本文称为“lidar通信”)。lidar通信可用于载具对载具(v2v)通信或载具对基础设施(v2x)通信,并且lidar通信可以发生在任何兼容的载具和/或基础设施之间(例如在车队内或不相关的载具之间,所述不相关的载具包括配置的lidar设备)。lidar通信可用于多种情况和多种使用情况,如本文所述。
34.为了描述本公开的创新方面的目的,以下描述针对于特定实现方式。然而,本领域技术人员将容易认识到,本文的教导可以以多种不同方式应用。所描述的实现方式可以在包括或耦合到一个或多个lidar设备的任何设备、系统或载具中实现。在一些实现方式中,用于执行本文所述的操作的“设备”可以指代耦合到载具以及一个或多个lidar设备的控制
设备或系统;包括控制设备或系统且耦合到一个或多个lidar设备的载具;耦合到基础设施或另一非载具系统的控制设备或系统;或其他合适的实现方式。类似地,“载具”可以指代耦合到该载具的控制设备或系统;与耦合到载具的控制设备或系统分离的载具;控制设备或系统与耦合的载具的组合;或其他合适的实现方式。
35.在以下描述中,阐述了许多特定细节,比如特定组件、系统和处理的示例,以提供对本公开的透彻理解。此外,在以下描述中且为了解释的目的,阐述了特定命名法和/或细节,以提供对示例实施例的透彻理解。然而,对本领域技术人员将明显的是,可能不需要这些特定细节来实践示例实施例。在其他情况下,以框图形式示出了公知电路、系统和设备,以避免模糊本公开。通过本文所述各种总线提供的任何信号可以与其他信号时分复用且经由一个或多个通用总线提供。另外,组件或软件块之间的互连可示为总线或单个信号线。每个总线可替选地可以是单个信号线,并且单个信号线中的每个可替选地可以是总线,并且单个线或总线可代表用于组件之间通信的许多物理或逻辑机制中的任一个或多个。此外,本文使用的术语“耦合”意味着直接耦合到或通过一个或多个中间组件或设备耦合。
36.图1是示例光检测和测距(lidar)设备100的框图。lidar设备100可用于通过发射照射对象表面的光脉冲并通过检测从对象表面反射的光脉冲,来检测环境中的对象表面。lidar设备100可以基于光脉冲的发射和从所选对象反射的对应光脉冲的接收之间的时间延迟来确定到对象的距离。该时间延迟可称为光脉冲的tof,可乘以光速以确定lidar设备100与对象之间的距离。可以使用多个脉冲来确定与环境中的对象相关联的多个点的距离信息。这些点可用于生成点云或可用于确定对象的位置、大小、形状、姿态和运动。在一些实现方式中,来自lidar设备100的信息可用于控制例如自主载具,使得自主载具可以在环境中导航到达目的地,同时避开障碍物。lidar设备100还可用于测量驾驶员辅助操作的距离。
37.lidar设备100被示为包括发送器110、接收器120和lidar控制器130。发送器110可以包括发送控制器111、一个或多个光发射器112和发送孔径113。光发射器112可以发射一个或多个光脉冲125,该一个或多个光脉冲125可用于检测周围环境中的对象。光发射器112可以包括任何数量的合适的光源,例如(但不限于)激光二极管、发光二极管(led)、垂直腔面发射激光器(vcsel)、有机发光二极管(oled)、聚合物发光二极管(pled)、发光聚合物(lep)、液晶显示器(lcd)、微机电系统(mems)或被配置为选择性地发送或发射定义的波长的光脉冲125的任何其他设备。源波长可以包括例如电磁光谱的紫外、可见和/或红外部分。在一些方面,光发射器112可以设置在一个或多个基板(例如,印刷电路板(pcb)、柔性pcb等)上。尽管光发射器112在本文中被描述为发射光脉冲115,但是本领域普通技术人员将容易理解光发射器112可以发送或发射光信号、光束、光子等。因此,术语光脉冲、光信号、光束和光子在本文中可以互换使用。
38.发送孔径113耦合到光发射器112,并且可以包括可聚焦、引导和/或调节(condition)光脉冲115以发射至周围环境中的任何合适的组件(例如,镜子、透镜、衍射光栅、出射孔径等)。在一些实现方式中,发送孔径113可以被配置为在相对于lidar设备100的一个或多个指定方向上引导(steer)光脉冲115。指定方向可以跨越(span)一系列方向,例如,使得可以基于对象导致的光脉冲115的反射来确定lidar设备100和多个对象(例如,载具、人、道路、交通信号、交通标志、障碍物等)之间的距离。
39.发送控制器111可控制光发射器112和发送孔径113的操作,并且可调整光发射器
112和发送孔径113的多个参数或设置或这两者。在一些实现方式中,发送控制器111可响应于lidar控制器130提供的一个或多个控制信号。例如,发送控制器111可基于一个或多个控制信号调整光发射器112发射的光脉冲115的宽度、定时、频率和/或幅度(强度)。在其他实现方式中,发送控制器111可被省略,或可包括在lidar控制器130内。
40.接收器120可以包括多个光电检测器121、检测器电路122和模数转换器(adc)123。光电检测器121可以从周围环境接收光脉冲125(例如,光子)。在一些实现方式中,接收的光脉冲125可以包括从周围环境中的一个或多个对象反射的发射的光脉冲115的分量。光电检测器121可以被配置为将接收到的光脉冲125转换成指示接收的光脉冲125的强度水平的光电检测器信号(例如,模拟电流信号)。光电检测器121可以是能够接收或感测光的任何合适的组件或设备,包括例如光电二极管(例如雪崩光电二极管)、硅光电倍增管(sipm)、光电晶体管、相机(例如cmos传感器)、有源像素传感器(aps)、电荷耦合器件(ccd)、低温检测器等。在一些实现方式中,光电检测器121是反向偏置光电二极管,其例如响应于接收光脉冲而产生电流,使得通过每个光电二极管的电流的量与光电二极管接收的光脉冲的强度成比例。
41.尽管为简单起见未示出,接收器120可以包括光学器件以滤波接收的光的波长,使得光电检测器121主要接收与发送器110发射的光脉冲115的波长相对应的光(以及接收与其他波长相对应的最少光)。例如,接收器120可以包括带通滤波器,以滤波以发送器110发射的光脉冲的基本波长为中心的波长范围之外的光学信号。
42.检测器电路122可以使用任何合适的技术来对由光电检测器121提供的光电检测器信号进行采样,以确定接收的光脉冲125的强度水平。在一些实现方式中,检测器电路122可以以多个间隔或采样时间对光电检测器信号进行采样。在其他实现方式中,检测器电路122可以连续地对光电检测器信号进行采样。检测器电路122可以将确定的强度水平提供给adc 123,例如作为具有指示包含在光电检测器信号中的光信息的幅度(例如,电压幅度或电流幅度)的模拟信号。在一些方面,检测器电路122可以放大和/或滤波光电检测器信号。
43.adc 123可以从检测器电路122接收指示接收的光脉冲125的强度水平的模拟信号,并且可以将模拟信号转换成可以由lidar控制器130处理的数字数据。adc 123可以是任何合适的adc,例如(但不限于)闪存adc、逐次逼近寄存器(sar)adc或德尔塔-西格玛(delta-sigma)adc。在一些实现方式中,每个光电检测器121可以对应于相应的adc。在其他实现方式中,多个光电检测器121可以对应于单个adc(例如,以减小lidar设备100的大小、成本和/或功耗)。在一些其他实现方式中,可以省略adc 123。每个光电检测器121(和对应的adc 123)可以与特定的光发射器112相关联。以这种方式,可以测量多个tof,因此可以在lidar设备100的一次通过(one pass)期间确定多个距离。
44.lidar控制器130可以包括处理器131、存储器132和数字信号处理器(dsp)133。dsp 133可以处理由一个或多个adc 123提供的数字数据,以确定关于任何数目的光电检测器121接收的光脉冲的信息。在一些实现方式中,光脉冲的强度和/或到达时间可用来确定周围环境中多个检测的对象的大小、形状和位置。例如,在已知光脉冲的离开时间的情况下,dsp 133可使用到达时间来确定tof。在另一示例中,在已知发射的光脉冲的强度的情况下,dsp 133可使用测量的强度来确定反射的光脉冲的能量损失。相对靠近lidar设备100的对象可在距离lidar设备100相对远的对象之前反射发射的光脉冲115。另外,从相对靠近lidar设备100的对象反射的光比从距lidar设备100相对远的对象反射的光具有更小的脉
冲展宽(假定不同距离处对象之间的表面反射率相似)。因此,在一些实现方式中,可基于接收的光脉冲125的上升沿和下降沿来估计lidar设备100和对象之间的距离。
45.处理器131可以是能够执行存储在lidar设备100(例如存储器132内)中的一个或多个软件程序的脚本或指令的任何适当的一个或多个处理器。在一些实现方式中,处理器131可包括一个或多个微处理器,以及提供至少一部分机器可读介质的存储器,在该机器可读介质内可存储程序指令或脚本。在其他实现方式中,处理器131可以是专用集成电路(asic)。在一些其他实现方式中,处理器131可以是或包括一个或多个现场可编程门阵列(fpga)或可编程逻辑器件(pld)。
46.存储器132可以存储与发送器110、接收器120、周围环境或其任何组合有关的信息。存储器132还可以包括可以存储许多软件(sw)模块的非暂时性计算机可读介质(例如,一个或多个非暂时性存储器元件,比如eprom、eeprom、闪存、硬驱动等),许多软件模块各自包括指令,该指令在被处理器131执行时,使lidar设备100执行本文所述的所有或一部分操作。在一些其他实现方式中,lidar控制器130可由lidar设备100外部的一个或多个处理器(比如包括在耦合至lidar设备100的载具处理系统中)指示,从而执行关于发射或接收光脉冲的一个或多个操作。例如,lidar设备100可耦合至载具的处理中心(hub)(比如经由控制器区域网络(can)总线)或载具的另一处理系统,并且处理系统可指示lidar设备100执行一个或多个操作,以及作为响应从lidar设备100接收信息(比如检索lidar设备100测量的tof或强度信息,该tof或强度信息由处理系统用来生成点云或其他类型的深度图或环境的渲染)。
47.图2a示出环境中的示例lidar设备。在图2a的示例中,lidar设备100位于包括汽车201和悬伸部(overhang)202的环境200中。在简化示例中,lidar设备100被示为包括将相应光脉冲115a-115c发射至环境200中的三个光发射器112a-112c。lidar设备100还被示为包括三个光电检测器121a-121c,其接收从环境200中的对象表面反射的相应光脉冲125a-125c。第一光脉冲115a照射悬伸部202的表面205a,并且第一光电检测器121a接收对应的反射的光脉冲125a。第二光脉冲115b照射汽车201的表面205b,并且第二光电检测器121接收对应的反射的光脉冲125b。第三光脉冲115c照射汽车201的另一表面205c,并且第三光电检测器121c接收对应的反射的光脉冲125c。lidar设备100可使用接收的光脉冲125a-125c的一个或多个属性(例如定时、幅度、脉冲宽度等)来确定lidar设备100和环境200中的表面205a-205c中的每一个之间的距离。
48.图2b是与示例lidar设备的发射的光脉冲和接收的光脉冲相对应的波形的示例定时图210。发送波形215a-215c可以指示从图2a的lidar设备100发射的相应光脉冲115a-115c的强度水平,并且接收波形225a-225c可以指示图2a的lidar设备100接收的相应光脉冲125a-125c的强度水平。在同一时间t0(或至少基本上同时)从lidar设备100发射光脉冲115a-115c,并且在不同时间t
a-tc(例如由于lidar设备100和环境200的每个表面205a-205c之间的不同距离)由lidar设备100接收反射的光脉冲125a-125c。发送波形215a-215c包括表示时间t0的相应脉冲216a-216c,在该时间t0处从lidar设备100发射对应的光脉冲115a-115c。接收波形225a-225c包括表示时间t
a-tc的相应脉冲216a-216c,在该时间t
a-tc处由lidar设备100接收对应的反射的光脉冲125a-125c。可以使用任何合适的峰值检测技术(例如,确定峰值幅度,确定质心,确定阈值交叉之间的平均时间等)来从相应脉冲226a-226c确
定接收时间t
a-tc。确定的接收时间t
a-tc可用于确定lidar设备100与环境200的相应表面205a-205c之间的距离。
49.许多lidar设备允许调整发射的光脉冲的一个或多个特征。例如,lidar设备100(图1)可以配置发送器110以调整用于发射的光115的光脉冲的定时、光脉冲的频率或光脉冲的强度中的一个或多个。在一些示例中,lidar设备100允许对发射的光115的光脉冲进行抖动以控制定时。一些lidar设备可以允许调整提供给光发射器112(例如led)的功率以控制强度。一些lidar设备可以允许调整参考信号频率(例如光源)以调整发射的光115的光脉冲的频率。接收器120还可以被配置为感测接收的光125的光脉冲在定时、频率或强度上的差异。例如,光电检测器121的光电二极管阵列的灵敏度可能足以确定强度差异,并且光电二极管阵列和/或adc的采样速率可能足以确定接收的光125的光脉冲在定时或频率上的差异。
50.在一些方面,lidar设备100(例如lidar控制器130)可以被配置为通过要发射的脉冲的频率调整、强度调整和/或时间抖动将信息编码到发射的光115中,以及发送器110可以被配置为通过发射的光115传达这样编码的信息。例如,lidar设备100可以接收要发送的数据信号,并且lidar设备100可以使用要发射的光(在此可称为光信号)作为载波信号。以这种方式,lidar设备100可以调制光信号以包括数据信号,并且lidar设备100可以发送调制的光信号。对于第一lidar设备,接收器120可以被配置为接收由第二lidar设备的发送器110发送的调制的光信号。调制的光信号被编码有来自第二lidar设备的数据信号,并且第一lidar设备的lidar控制器130可以被配置为从接收的调制的光信号中提取该数据信号。例如,lidar控制器130可以解调接收的光信号以产生数据信号。由于lidar设备之间的这种通信是点对点的(因此不需要中央网络),并且信号的频率大于蜂窝通信,因此吞吐量可能更高,延迟可能低于传统蜂窝通信。“调制的光信号”在此是指被调制成包括数据信号的光信号(例如由lidar设备100发射的光)。
51.在一些实现方式中,lidar设备100可以被配置为在距离测量模式(在本文中可以称为“检测模式”)和用于发送包括数据信号的调制的光信号的通信模式之间切换。例如,lidar控制器130可以确定lidar设备100何时通过调制的光信号发送或接收信息,以及lidar设备100何时操作以检测环境中对象的表面。例如,lidar控制器130可以确定在第一时间部分将lidar设备100置于通信模式以及在第二时间部分将lidar设备100置于检测模式。lidar设备100因此可以在通信模式和检测模式之间切换。在一些其他实现方式中,发射的光115可以用于将信息传达到另一个接收器(例如通过调整频率)并且还用于检测对象的表面(例如通过感测接收的光125中的强度差异),并且lidar设备100可以被配置为同时执行两种模式。例如,lidar设备100可以发射调制的光信号(包括数据信号)。lidar设备100可以接收调制的光信号的反射并且使用该反射来确定对象距离lidar设备100的深度。另外,第二lidar设备可以从lidar设备100接收调制的光信号并且解调光信号以生成所包括的数据信号。
52.诸如载具或基础设施的设备可以包括配置为经由发射的光115来传达(由例如载具或基础设施提供的)数据信号的一个或多个lidar设备(例如lidar设备100),或与之耦合。以这种方式,设备可以使用配置的lidar设备与载具或基础设施进行通信。在一些方面,lidar设备100可以被配置为使用由包括lidar设备的其他载具和基础设施采用的通信协
议。通信协议可以是自组织的或受管理的,并且任何合适的信息分组(packetization of information)可以用于通信协议。例如,载具车队内的lidar通信可能基于特定协议。在一些实现方式中,标准化协议(或多方采用的协议)可以更容易地允许载具和基础设施之间的lidar通信的集成。这样的协议可以包括用于发送和接收信息的定义的分组格式。诸如蜂窝通信、wi-fi通信、数字用户线(dsl)通信、光纤通信等的来自其他通信介质的协议可被利用以创建用于lidar设备之间通信的协议。
53.图3示出基于示例通信协议的多个接收的分组300的示例分组格式。在一些实现方式中,lidar设备100可以包括缓冲器或其他合适的存储器(例如存储器132),用于对一个或多个接收的分组300(例如分组1-6)排队。lidar设备100可以处理用于载具或基础设施的缓冲的分组以执行一个或多个操作。在另一示例中,可以将缓冲的分组提供给设备的处理系统以进行处理。如图所示,分组1-6的格式包括字段302-308,其包括发送器id 302、位置304、有效载荷类型306和有效载荷308。在分组中可包括附加的字段、更少的字段、不同的字段或不同的字段组织,因为可以使用任何合适的分组格式。例如,分组1-6可以在有效载荷308之后包括循环冗余校验(crc)字段,以纠正接收的分组中的任何错误。
54.发送器id 302可以指示发送分组的设备。在一些实现方式中,每个载具可以包括唯一标识符以标识该特定载具。例如,如果由200辆自主载具组成的车队相互通信,则每个载具可以包括相对车队中其他载具是唯一的标识符(例如“载具_1”至“载具_200”)。如果装备在与“载具_100”相关联的载具上的lidar设备将分组1和2发送到lidar设备100,则分组的发送器id 302可以包括该唯一标识符“载具_100”。类似地,如果装备在与“载具_102”相关联的载具上的lidar设备将分组3发送到lidar设备100,则分组的发送器id 302可以包括该唯一标识符“载具_102”。一些载具可能不包括唯一标识符或没有被标识,但该载具仍可将分组传达给lidar设备100。在一个示例中,发送器id 302可包括特定于先前未标识的载具或设备的发送器id值(针对分组4被示为“未标识_载具”)。发送器id值可以是例如零填充、具有空值的字段,或以其他方式适当地填充,以指示没有针对与该分组相关联的载具或基础设施的唯一标识符。
55.基础设施(例如收费亭、隧道、高承载载具(hov)车道的入口门等)可以包括或耦合到一个或多个lidar设备,以向lidar设备100发送分组和从lidar设备100接收分组。例如,分组5可以由位于隧道入口处的发送器(可以唯一地标识为“隧道_40”)发送,而分组6可以由位于收费亭的发送器(可以唯一地标识为“收费亭_30”)发送。任何合适的载具或基础设施可以包括用于lidar通信的lidar设备,并且可以包括唯一的发送器id。
56.在一些实现方式中,与优先传输相关联的紧急载具、施工区和其他设备可以包括指示分组用于优先传输的发送器id。如果lidar设备100顺序地解码分组,则lidar设备100可以首先处理发送器id 302并且确定分组是优先传输。以这种方式,lidar设备100可以在完成对分组的其余部分的处理之前确定分组将被优先处理。可以使用发送器id 302的其他合适的实现方式,并且本公开不限于所提供的示例。例如,发送器id可以被配置为区分车队、载具类型(例如私人汽车、商用卡车、校车等)等。
57.位置304可以指示与发送设备相关联的载具或基础设施的位置。例如,载具或基础设施可以包括全球定位系统(gps)接收器以确定纬度和经度。然后可以在位置304中提供纬度和经度,例如对于分组1-6所示。位置304可替选地可以包括如由其他载具或基础设施经
由其自身的lidar设备确定的、相对于lidar设备100的定位信息。例如,发送lidar设备可以确定发送和接收载具或基础设施之间的相对距离和位置,并且可以在位置304发送设备距离和位置。在一些实现方式中,如果无法发送位置信息(例如载具不包括gps接收器),则位置304可以用零填充或以其他方式填入以指示没有提供位置。
58.有效载荷类型306可以指示要在分组的有效载荷308中提供的信息的类型。在示例分组1-6中,分组1的有效载荷类型306指示“心跳”或“跳动”,其可以是由“载具_100”周期性发送的信号。在一些实现方式中,“心跳”或“跳动”可以指示分组类似于信标,并且可以在有效载荷308中提供基本信息。在提供载具或基础设施的基本信息的一些示例中,有效载荷1可以包括用于发送器的抖动率或其他操作参数和/或用于载具的轨迹信息或其他状态信息。可替代地,针对这样的分组在有效载荷308中可不提供信息(例如,有效载荷是零填充的,并且分组仅用于经由位置304提供位置信息并且通知其他设备存在发送器)。
59.分组2的有效载荷类型306是“渲染_描述”。如在以下示例用例中所述,lidar设备100可以测量lidar设备100的视线(los)内的表面,但不在lidar设备100的los内的表面不会被感测和检测。以这种方式,基于来自lidar设备100的测量的环境的渲染可能不包括不在lidar设备100视野内的载具部分。“渲染_描述”可以指示在有效载荷308中可以提供关于渲染载具或基础设施的基本信息。例如,有效载荷2可以包括与要渲染的“载具_100”相关联的一个或多个形状的尺寸。在一个实现方式中,尺寸可以包括几何形状的朝向和尺寸(例如用于二维渲染的矩形或用于三维渲染的矩形棱柱)。其他合适的渲染信息可以包括由有效载荷308指示的对象渲染的纹理、轮廓或其他特征。例如,紧急载具或道路施工区可以在载具向驾驶员和/或乘客显示的渲染中被突出显示。有效载荷308因此可以指示纹理以突出与紧急载具或施工区相关联的渲染的部分。在另一个示例实现中,类似的纹理可以用于同一车队内的载具。以这种方式,驾驶员和/或乘客可以容易地在显示的渲染中识别车队载具。然而,可以使用任何合适的渲染描述,并且本公开不限于所提供的示例。
60.作为“渲染_描述”的附加或替选,有效载荷类型306可以指示“渲染_识别”,例如针对分组4。在一些实现方式中,可以在数据库中(比如查找表或其他合适的组织起来用于访问的数据组)存储标准载具(或基础设施)的列表及其相关联的渲染信息。例如,如果发送分组的载具是1994geo metro,有效载荷308(比如有效载荷4)可指示“1994geo metro”。在确定针对特定载具的渲染细节时可使用数据库(比如渲染的尺寸和纹理),并且现有的渲染可通过额外的渲染细节增强。数据库还可包括关于特定载具的信息,比如长度、加速能力等。术语“渲染”在本文可以指线条图、点云、深度图、图像、纹理、阴影化或可以可视化或被显示的其他信息。
61.分组5的有效载荷类型是“门-入口(gated-entry)”,这可以表明有效载荷5指示允许进入“隧道_40”的载具的类型。例如,“隧道_40”可能限于高承载或自主载具,这可以在分组5中指示。因此,包括lidar设备100的载具可以基于有效载荷5中的信息确定是否允许进入“隧道_40”。
62.分组6的有效载荷类型为“费用_收费”,这可以表明有效载荷6指示“收费亭_30”收取的费用。例如,如果过桥费为5美元,则有效载荷6可指示当载具通过“收费亭_30”时,将从驾驶员或车队的帐户自动收取5美元。在一些实现方式中,有效载荷308可以包括要收取的费用和对载具进入的限制的组合。例如,用于停车库空间的发送器可以指示停车费率以及
该空间中允许的载具(例如,预留给电动载具空间、指定的残疾人停车位等)。当载具停放在该空间中时,发送器可以基于费率更新停车费用,使得驾驶员可以知道当前的停车成本。
63.分组3的有效载荷类型是“载具_定位器”,这可以表明有效载荷3指示试图找到的载具。例如,如果“载具_005”离线,则车队中的载具可能发送尝试定位“载具_005”的分组。以这种方式,有效载荷3可以包括“载具_005”标识符以指示要定位哪个载具。在一些实现方式中,lidar设备100可以保留接收的分组的多个发送器id。因此,lidar设备100可以被配置为搜索所保留的接收的分组的发送器id,以确定“载具_005”是否与lidar设备100通信。lidar设备100然后可以将其指示给“载具_102”。例如,lidar设备100可以将来自“载具_005”的分组中接收到的位置发送给“载具_102”。在一些其他实现方式中,lidar设备100可以被配置为将消息传播给其他载具或基础设施,从而指示要定位“载具_005”。以这种方式,如果“载具_005”从其他载具或基础设施接收到传播的消息,则“载具_005”可确定与车队传达其位置。
64.可能存在其他合适的有效载荷类型和有效载荷(例如针对如本文所述的lidar通信的不同使用情况),并且本公开不限于所提供的示例。在一些示例实现方式中,载具可以包括多个传感器以收集信息以用于分组生成。例如,有效载荷可以包括关于乘客数量、载具运行模式等的信息,并且可以使用诸如压力传感器、载客量(occupancy)传感器、引擎传感器的传感器来检测运行模式等,以收集这样的信息。
65.可以经由lidar通信提供和接收各种各样的信息,并且lidar通信可以应用于如本文所述的各种使用情况。
66.lidar通信实现
67.载具定位器
68.载具可以在没有用于通信的蜂窝网络的区域中运行。例如,当载具穿过农村或人口稀少的区域时,载具可能没有一致的蜂窝连接或无法与基站通信。在另一个示例中,载具的蜂窝调制解调器可能无法运行。如果载具是载具车队(例如出租车或租车车队)的一部分,则调度员可能无法识别载具的位置,并且调度员可能希望找到载具。
69.在一些实现方式中,搜索丢失、滞留或离线的载具可以是主动的,其中找到离线载具的载具或基础设施向调度员报告回找到离线载具。在一些其他实现方式中,搜索离线载具可以是反应性的,其中载具记录离线载具的最后已知位置。以这种方式,载具在与调度员或车队的其他部分同步时(例如当载具正在充电或以其他方式不运行时)报告其发现。
70.可以指示车队中的其他载具通过lidar通信发送载具定位器消息。例如,可以向车队载具中的每一个指示周期性地发送具有有效载荷类型“载具_定位器”的分组,其在分组有效载荷中标识离线载具。调度员还可以指示基础设施(例如包括或耦合到lidar设备的车队拥有的电动载具充电站或停车空间),以发送载具定位器消息。如上所述,其他载具也可以在收到此类消息后传播该消息,以扩大发送载具定位器消息的发送器的数量。以这种方式,相对于其主要通信方法(例如蜂窝)可能离线的载具可以从经过的载具或基础设施接收消息,并且该载具可以确定通过lidar通信将其位置传达给调度员。在另一个示例中,找到离线载具的载具或基础设施可以将离线载具的位置传达给调度员。
71.例如,如果另一车队载具与离线载具进行lidar通信,则离线载具可以通过lidar通信向其他车队载具发送其蜂窝调制解调器不可操作的消息,并且例如通过其他载具的蜂
窝调制解调器联系调度员。以这种方式,调度员可以通过其他车队载具与离线载具通信。
72.作为调度员发现离线车队载具的附加或替代,可以在紧急情况下比如针对被盗载具使用载具定位器消息。载具定位器分组的有效载荷可以包括要找到的载具的描述,并且这样的分组可以被传播到其他载具和基础设施以找到被盗载具。在一些实现方式中,载具可以响应于接收到分组而向驾驶员显示通知。在一些其他实现方式中,可以基于被盗载具的尺寸或其他属性自动识别被盗载具。例如,使用lidar设备检测到的其他载具的表面可用于基于被盗载具的相似尺寸或其他特征识别具有相同品牌和型号的载具。在另一示例中,可见光相机可用于在检测到丢失的载具之后捕获车牌的图像,并且可以分析该图像以基于车牌号识别丢失的载具。载具可以向中央办公室报告(例如通过蜂窝调制解调器)丢失的载具的位置。
73.在一些其他实现方式中,载具定位器消息可以由离线或禁用的载具发起。例如,车队载具的蜂窝调制解调器可能无法使用,并且车队载具无法通过蜂窝网络与车队通信。如果调度员通过蜂窝通信提供关于车队载具要去哪里的信息,则车队载具可能无法确定调度员希望将载具派送到哪里。在自主载具出租车车队的示例中,调度员可能希望派送载具去特定地址接载客户,然后使客户乘出租车到特定目的地。但是,载具无法接收到来自调度员的指令。lidar通信可用于向调度员提供来自载具(例如具有禁用的蜂窝调制解调器的载具)的任何消息。例如,载具可以通过lidar通信向其他车队载具发送针对调度员的消息。其他车队载具然后可以将消息发送给调度员。以这种方式,调度员被告知载具可能无法从调度员接收消息,并且调度员可以在车队中没有该载具的情况下更新处理请求。调度员还可以通过lidar通信(例如通过其他车队载具)向载具提供指令,以在指定地点等待服务、将自己从车队运营或任何其他合适的运营中移除。
74.在一些实现方式中,载具可以具有远离出租车车队调度员的归属(home)位置。例如,如果载具没有要前往的位置(例如针对调度员传达的车费),则载具可以返回服务区域中的指定地点,例如载具在该服务区域内的特定停车空间。该空间可以与如下lidar设备相关联,该lidar设备可与载具通信(例如,允许调度员与载具通信)。当载具完全可操作并回到与调度员的标准通信时,指定地点可以是载具的停放区域,直到载具被激活以收取车费。当载具无法与调度员通信且不用于车费时,载具也可以返回指定地点(如停车空间)。本文提到离线载具可指滞留的、丢失的或其他未运行或可能不预期在默认、典型或标准运行模式下运行的载具。
75.图4示出了环境400,其包括用于自主车队载具402在不使用时返回的示例停车空间410。自主载具402包括一个或多个lidar设备,例如lidar设备404。站(stand)408可以位于停车空间410附近。站408的示例包括停车计时器、充电站和用于步行客户的出租车站。在一些实现方式中,站408包括通过lidar通信406与载具402通信的lidar设备。站408还包括有线或无线回程(例如蜂窝调制解调器或光纤连接)。无法直接与调度员通信的载具402可以通过lidar通信与站408通信,并且站408可以通过回程与调度员通信。虽然载具402被描述为通过lidar通信与站408通信,但是在一些其他实施方式中可以使用附加的或替代的通信系统。其他系统可以包括无线局域网系统(例如基于ieee 802.11的系统)、蓝牙(r)系统、蜂窝系统(例如3g、4g、5g等)、可见光通信系统、近场通信(nfc)系统等。
76.在与站408通信时,载具402可以向站408提供载具定位器分组。在一些实现方式
中,发送载具定位器分组可以向站408和调度员指示载具402不能直接与调度员通信(例如通过蜂窝调制解调器)。在一些示例中,调度员可以从服务移除载具402,向载具402派遣维护人员,发送载具402的位置以用于维护,或传达将由载具402处理的新车费。在一些实现方式中,站408还可以在道路上通过时与载具402通信。如果载具402不能直接与调度员通信,则站408可以用载具402的位置更新调度员。
77.叫车
78.除了定位载具之外,lidar通信还可用于对载具进行叫车(hailing)。返回参考图4,站408可以是步行出租车站。人可以步行到站408并输入期望的目的地(例如通过智能手机应用、站408的图形用户界面或与站408的另一个合适的界面)。多个自主载具可以在远离站408的位置(例如在拐角处的停车场中)排队并且与另一个lidar发送器(例如在停车场中的一个或多个站)通信。停车空间410可以是队列中的下一载具被叫车的位置,并且停车空间410可以是其中用户进入载具并开始所请求的乘坐的位置。
79.站408可以同时处理多个乘坐请求。结果,站408可以叫车多个载具(比如在排队的载具的暂存区域中使用一个或多个lidar发送器)。每个被叫车的载具可以被分配特定的客户或乘坐,并且当载具接近停车空间410时,载具可以向站408(通过lidar通信406)指示分配的乘坐。以这种方式,站408可以通知客户分配给停车空间410中的载具的乘坐,以加快搭载并协调来自同一停车空间410的多个客户的乘坐。
80.通知
81.lidar通信可用于向载具或驾驶员提供通知。例如,可以通过lidar通信向载具通知例如接近的紧急载具、道路危险、上学时间期间的学校人行横道道、速度限制的变化、施工区等。对于紧急载具,可以由基础设施或先前接收广播的载具传送紧急广播以通过lidar传达通知其他载具存在紧急载具。
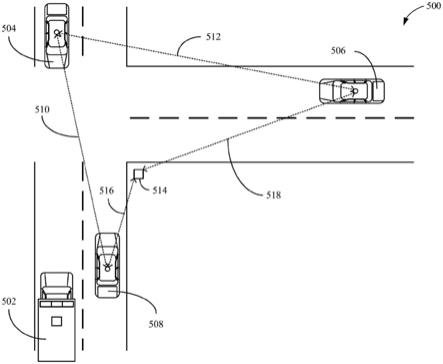
82.图5示出了用于将救护车502的存在传送给载具506的示例环境500。载具508可以检测救护车502。例如,救护车502可以广播指示救护车502存在的紧急信号。在另一个示例中,载具508的lidar设备或其他传感器可以感测救护车502,并且载具508可以将救护车502识别为紧急载具。
83.在除救护车502之外的一些示例中,载具508可以检测环境中会使其他载具有必要改变其导航的人,或可被通知这样的人。例如,载具508可以检测车道上的一个或多个骑自行车的人、在街道附近玩耍的儿童、穿过街道的儿童或其他行人(例如上学前或放学后)等。在其他示例中,载具508可以检测汽车熄火、轻微交通事故(“轻微车祸”)、道路阻塞或其他可能需要其他载具改变其导航或被告知此类事故的交通状况。这种场景会使载具有必要降低其通过该区域的速度,使用一个或多个lidar设备调整扫描环境以聚焦于特定区域,改变车道等,例如以便为检测到的人、情况等提供更多空间。
84.载具508可能不在与载具506的lidar通信范围内。例如,lidar通信可以基于los,并且载具506可能被建筑物阻挡或以其他方式遮挡以防止载具508与载具506直接通信。在一些实现方式中,载具508可以使用一个或多个载具和/或基础设施来执行与载具506的lidar通信(例如,“在拐角处”通信)。例如,载具508可以使用与载具504的lidar通信510来指示救护车502的存在。附加地或替代地,载具508可以通过lidar通信516与站514通信以指示救护车502的存在。
85.虽然图5示出lidar设备(510、512、516和518)之间的直接los通信,但lidar设备之间的los通信可以包括离开表面的一个或多个信号反射。例如,来自发送lidar设备的光信号的聚焦波束可以有意地从环境500中的一个或多个建筑物墙壁、标志或其他对象反射,并且反射可以由接收lidar设备接收。如果波束被充分聚焦,则该发送包括足够的发送功率,并且一个或多个表面具有足够的反射率,接收lidar设备接收的反射可以被处理以确定发送lidar设备发送的通信(例如存在救护车502的通知)。以这种方式,lidar设备可以在没有直接los的情况下相互通信。在本说明书中,los可以包括直接los或间接los(可以包括一个或多个反射)。
86.载具504或站514可以被配置为向lidar通信范围内的其他载具和基础设施指示救护车502的存在或其他交通状况。例如,载具504可以使用lidar通信512来指示救护车502的存在。在另一个示例中,站514可以使用lidar通信518来指示救护车502的存在。在该示例中,指示救护车502的存在可以包括从载具508到达载具506的两个跳(例如,通过lidar通信510和512或通过lidar通信516和518)。
87.在一些实现方式中,紧急载具的指示(或其他通知)可以被传播达定义的跳数或定义的距离。以这种方式,向其他载具通知存在紧急载具被局部化(localize)到紧急载具或交通状况周围的区域。在一些示例中,载具508还可以确定救护车502的轨迹、路线或其他信息,并将这样的信息指示给载具504或站514。传播该指示的距离或跳数可以例如在路线的方向上增加(或相反,在与该路线相反的方向上减少)。如果载具506是自主载具,则载具506可以响应于接收到存在救护车502或其他交通状况的指示而主动靠边停在路边、停下、改变车道或更改其路线。在一些其他实现方式中,载具506可以向驾驶员(和/或乘客)提供视觉或听觉通知以指示存在救护车502或交通状况。例如,载具的扬声器或显示器可以通知驾驶员和/或乘客存在救护车502或交通状况。
88.另一个示例通知可以是停车场或停车库中的可用停车空间。在一些实现方式中,停车库的入口门可以通过lidar通信将可用空间传达给进入的载具。如果载具是自主载具,则可以为载具分配停车空间,并且载具自动前进并停放在该空间中。以这种方式,停车库或停车场可以有效地组织进出的载具的停放。在一些其他实现方式中,入口门可以向载具指示可用停车空间,并且载具可以向驾驶员和/或乘客通知可用空间的位置。例如,载具可以显示停车库的地图并在显示的地图上指示可用空间的位置。可以在载具进入停车库之前(例如,当载具接近车库时)通知驾驶员和/或乘客,并且驾驶员和/或乘客可以选择哪些空间是优选的。
89.如上所述,另外的示例通知可以是交通事故或其他交通的障碍物。通知可以通过lidar通信被传达给障碍物之前的载具,并且载具可以基于接收的通知来确定替代路线和/或向驾驶员和/或乘客通知可能的延迟。其他合适的示例通知也可以通过lidar通信来发送,并且本公开不限于上述示例。
90.有限的访问区域
91.lidar通信的另一个用例是限制对限定区域的访问。某些区域可能限于特定载具或载具类型。例如,医院救护车入口可能限于救护车。在另一个示例中,残疾人停车空间可能限于包括残疾人标签的载具。在另一个示例中,hov车道可能限于包括例如3名或更多乘客的载具。在另一个示例中,城市中心的部分可能限于自主载具、低排放或零排放载具、出
租车或其他特定类型的载具。在另一个示例中,公司停车库可能限于员工载具或具有安全许可(security clearance)的载具。
92.lidar通信可用于指示对特定区域的限制,并针对特定载具授权访问该区域。在一些实现方式中,用于该区域的lidar设备(例如入口门、站或其他基础设施)可以向接近的载具发送该区域的限制。然后,载具可以(通过其自己的lidar设备)向lidar设备传达必要的认证,表明载具已获准进入该区域。然后可以允许载具进入和导航该区域(例如开门或载具被授权访问该区域)。在一些其他实现方式中,载具可以存储该区域所需的资格。以这种方式,载具可以先发制人地将其凭证传达到lidar设备以获得访问的权利。例如,当救护车接近医院的救护车入口时,救护车可以使用lidar设备将自己识别为救护车以进入。
93.对区域的访问限制可以随时间改变。例如,hov车道可能仅在指定的高峰时段受到限制。在另一示例中,当烟雾水平高于阈值时,城市中心可能会限于零排放载具。在另一个示例中,事故周围或需要警察或应急响应人员的区域可能限于此类警察或应急响应人员载具。由于lidar通信不需要集中式网络,因此访问限制的变化可以比例如通过其他通信远程协调和试图建立区域的访问参数更快地被制定并提供给载具。在一些示例中,载具可以向驾驶员和/或乘客通知载具即将进入受限制区域。以这种方式,驾驶员、乘客或载具本身可以调整路线以在受限制区域周围导航。
94.在另一实现方式中,区域可以包括基于一天中的时间、星期几、区域中的拥塞量、特殊事件等的不同通行费或费用。lidar通信可以用于在载具进入区域之前向载具传达这样的通行费或费用。然后,驾驶员和/或乘客可以基于该信息确定(或载具可以自动确定)进入该区域。例如,一些道路包括热车道,其中进入该车道的价格基于一天中的时间和道路上的拥塞。驾驶员和/或乘客可以被通知进入热车道的价格,从而决定是否进入。可替代地,载具可以被配置为基于例如价格是否小于阈值量或乘坐的优先级来进入热车道。例如,如果一对准父母正前往医院,则可以设置乘坐的优先级以凌驾于与热车道有关的任何价格约束之上。可能存在其他合适的限制用例,并且本公开不限于所提供的示例。
95.对象可视化或渲染
96.lidar通信的另一个用例是提供渲染或可视化信息。如关于图3所描述的,分组可以包括“渲染_描述”或“渲染_识别”信息,用于渲染或可视化载具(或基础设施,例如图4中的站408)。渲染或可视化载具环境中的对象可能限于耦合到载具的lidar设备的los。因此,可能无法检测和渲染不在lidar设备的los中的表面。
97.图6a图示了载具602的示例环境600。环境600包括建筑物604和606以及载具608和610。如图所示,从载具602的lidar设备612的角度的载具608的视图包括载具608的前表面和驾驶员侧表面。从lidar设备612的角度的载具610的视图被建筑物606遮挡。结果,载具610的视图包括前表面和仅一部分驾驶员侧表面。此外,从lidar设备612的角度的建筑物604和606的视图是面向载具602的表面。lidar设备612可以收集关于lidar设备612的视图内的表面的深度的信息,且载具602可以可视化或渲染包括检测到的表面的环境600。如本文所用,载具对环境进行可视化或渲染可以包括以下中的一个或多个:载具或基础设施向耦合到载具或基础设施的显示器(例如可通信地耦合到载具的处理系统的平板电脑、耦合到载具的处理系统的仪表板内娱乐系统、远离载具的显示器等)提供在显示器上渲染至少一部分环境的指令;或载具在集成显示器上渲染至少一部分环境(例如通过载具的中央控
制台中的集成娱乐系统)。如本文所用,特定载具或基础设施执行一个或多个操作(比如载具可视化或渲染环境)可以指的是:耦合到载具或基础设施的设备或系统执行操作(比如生成要显示的渲染、以及将渲染提供给耦合到载具或基础设施的显示器)。
98.图6b图示了由lidar设备612感测的环境600的示例渲染650。如上所述,示例渲染650可以显示在载具的集成显示器上或耦合到载具的处理系统的显示器上。渲染650包括对应于建筑物604的表面654、对应于建筑物606的表面656、对应于载具608的表面658和对应于载具610的表面660的渲染。示例渲染650还包括载具602的表示652以提供视角。例如,表示可以是图标、库存图像、块或要用于渲染的载具的其他已保存表示。
99.示例渲染650被简化以解释本公开的方面,并且渲染650可以包括附加信息或细节。例如,道路上的线条或标记可以是反射性的,因此可以通过lidar被感测。在另一个示例中,可以通过lidar感测lidar设备612的los内的建筑物604和606以及载具608和610的附加特征。虽然示例渲染650从鸟瞰图被示为二维的,但渲染可以是任何合适的朝向或来自任何合适的视角。例如,渲染从lidar设备612的角度看可以是三维点云,从lidar设备612的角度看可以是环境的二维视图,或可以是任何其他合适的渲染。
100.示例渲染650可以由载具602经由载具显示器提供给驾驶员和/或乘客。例如,示例渲染650可以显示在载具的集成显示器上,或者载具可以向耦合到载具的处理系统的显示器提供用于渲染的指令。如示例渲染650中所示,针对对象和建筑物的隐藏表面可能不能确定深度信息。例如,渲染650不包括载具608的乘客侧和后表面的信息,不包括载具610的乘客侧、后和一部分驾驶员侧表面的信息,并且不包括建筑物604和606不指向载具602的侧部的信息。
101.在一些实现方式中,另一lidar设备可以向载具602发送环境600中的一个或多个对象的渲染信息。例如,载具608的lidar设备614可以发送关于载具608的信息以用于渲染,并且载具610的lidar设备616可以发送关于载具610的信息以进行渲染。在一些实现方式中,可以发送用于渲染载具的形状的尺寸。例如,可以将用于在渲染650中渲染载具608的一个或多个矩形的尺寸从lidar设备614发送到lidar设备612。可将用于在渲染650中渲染载具610的一个或多个矩形的尺寸从lidar设备616发送到lidar设备612。还可以发送关于渲染载具608和载具610的其他特征。示例特征包括纹理,例如用于载具渲染的颜色、阴影、突出显示等。
102.在一些其他实现方式中,lidar设备614和616可以发送相应载具的识别。例如,lidar设备614可以发送关于载具608的品牌和型号、载具608的载具识别号、载具608的车牌号、载具是否是特定载具车队的一部分(例如与载具602相同的载具车队)、载具车队内的唯一标识符的信息或其他识别信息。
103.载具602(或耦合到显示器以显示渲染的存储器)可以存储特定载具的渲染信息,并且载具602可以使用载具识别来查找存储的特定载具的渲染信息。例如,载具存储器(或其他存储器)可以存储用于多个品牌和型号的载具(包括载具608和载具610)的渲染信息,并且可以检索和使用这样的渲染信息来增强环境600的渲染650。如果渲染650要显示在耦合到载具602的显示器上,则载具602可以提供从载具存储器检索的渲染信息,或者载具602可以提供用于识别外部存储器中的渲染信息的信息(比如将关于品牌和型号的信息提供给耦合到载具的娱乐系统)。示例渲染信息可以包括特定载具的库存图像或绘图。在一些示例
中,渲染信息可用于替换渲染650的对应部分或与其组合。在一些其他示例中,调整渲染可包括突出显示对象渲染。例如,可以更新渲染以通知驾驶员或乘客载具环境中的紧急载具或情况。
104.图6c示出了载具672的示例环境670。示例环境670包括建筑物684和686以及载具674和676。环境670还包括紧急载具678。图6d示出了图6c中的载具672的环境670的示例自上而下渲染690。渲染690包括对应于建筑物684的表面694、对应于建筑物686的表面696和对应于载具674的表面698的渲染。示例渲染690还包括载具672的描绘692以提供视角。载具676和紧急载具678可能不在耦合到载具672的lidar设备的los内。结果,渲染690可能不包括载具676的渲染或紧急载具678的渲染。
105.图7示出了描绘用于调整例如载具、lidar设备、基础设施等的环境的渲染的示例操作700的流程图。以下参考图6a和6c中的载具602和672仅用于说明目的描述示例操作700。本领域普通技术人员将认识到,示例操作700可以由根据各种实现方式的任何合适的设备(例如耦合到载具的控制设备)、基础设施和/或载具执行,并且本文描述的示例操作700可以用额外的步骤、更少的步骤、不同顺序的步骤、并行的步骤或其任何组合来执行。在本文中,载具602执行一个或多个步骤可以是指耦合到载具的处理系统执行一个或多个步骤、集成到载具602中的处理系统执行一个或多个步骤、或用于执行所描述的方法的其他合适的实施例。例如,与载具分离的控制设备可以安装或以其他方式耦合到载具。这种控制设备也可以耦合到一个或多个lidar设备,耦合到显示器(用于渲染或显示其他信息),和/或耦合到一个或多个其他输入/输出组件(例如扬声器、键盘等)。载具602执行一个或多个步骤在一些实现方式中可以指的是控制设备执行一个或多个步骤。
106.从702开始,载具602可以接收与由第一lidar设备的发送器发射的调制光信号相关联的数据。例如,设备可以耦合到lidar设备612,调制光信号可以从lidar设备614或lidar设备616被发送到lidar设备612。调制光信号包括被调制成包括数据信号的光载波信号。lidar设备612或耦合到lidar设备612的设备可以提取数据信号并确定数据信号中包括的数据。
107.载具602还可基于来自耦合到载具的一个或多个lidar设备的信息生成载具环境的渲染(704)。例如,载具602可以包括处理系统以在lidar设备612处于检测模式时从lidar设备612接收测量。该测量可用于生成渲染,例如点云、深度图或环境600的其他合适的表示。例如,处理系统可以基于来自lidar设备612或耦合到载具的其他lidar设备的接收的测量,生成环境600的示例渲染650(或环境670的示例渲染690),且渲染可以包括在环境600(或环境670)中检测的表面的的表示。
108.基于接收到的数据,载具602可以更新渲染(706)。例如,载具602可以更新环境中对象的渲染(708)。在一些示例实现方式中,载具602可以在接收到的数据中接收对象标识符。例如,处于通信模式的lidar设备612可以通过调制的光信号从lidar设备614接收包括载具608的标识符的分组。标识符可以是分组中的特定载具id、载具识别号、载具的品牌和型号,或其他合适的标识符。
109.载具602可以基于标识符确定对象的渲染信息。示例渲染信息可以包括在渲染对象中的一个或多个形状(例如在渲染载具中的一个或多个矩形或其他形状)的尺寸、对象的代表性图像(比如基于例如载具的类型、载具的品牌和型号等的载具的代表性绘图)、对象
的库存图像(例如载具的库存图片)或要应用于对象的渲染的纹理(比如要应用于载具的渲染的纹理)。渲染信息还可以指示对象渲染是否要突出显示或调整(例如大小、尺寸、拉伸等方面的变化)。在一些实现方式中,如果载具602接收到载具608的标识符(例如品牌和型号),则载具602可以扫描由与渲染信息(比如载具的参考图像,载具的所存储尺寸,如果是紧急载具则是突出显示信息等)相关联的标识符(例如品牌和型号)索引的数据库,来确定载具608的渲染信息(比如载具608的品牌和型号的存储的图像)。载具602然后可以基于确定的渲染信息来更新对象渲染。例如,渲染650中的渲染的表面658可以与载具608的存储的图像或其他渲染信息组合以更新渲染650。在另一个示例中,渲染的表面可以被突出显示。在更新对象渲染的另一个示例中,可以将对象渲染添加到环境的渲染中。例如,载具676的渲染和/或紧急载具678的渲染可以被添加到渲染690。
110.在一些其他实现方式中,lidar设备可以被配置为发送包括应如何渲染对象的具体描述的数据信号。例如,载具608的lidar设备614可以发送渲染模型、纹理和用于渲染载具的任何其他特征。以这种方式,在更新环境的渲染时确定对象的渲染信息时可以不使用包括查找表、数据库等的存储器。
111.返回参考图7,在更新渲染之后,载具602可以提供更新的渲染以供显示(710)。例如,耦合到载具602的控制设备可以向耦合到载具602的显示器提供更新的渲染,并且显示器可以向驾驶员和/或乘客显示更新的渲染。在另一个示例中,可以将渲染提供给远程显示器以供其他人获知载具602的环境。
112.图8示出图6中的环境600的示例渲染800。渲染800可以是基于载具608和610的渲染信息的图6b中的渲染650的调整的渲染的示例。例如,载具602可以为接收到的载具608和610的标识符存储代表性图像(例如库存图像、线条图等)或其他合适的渲染信息。lidar设备614和616可以将载具标识符发送到lidar设备612,并且载具602可以使用接收到的载具标识符来确定载具608和610的渲染信息以调整渲染650。
113.与载具608相关联的渲染表面658可以与载具608的确定的渲染信息(例如载具608的库存图像或存储的绘图)组合。例如,载具608的图像可以与渲染的表面658对齐(例如通过尺寸调整和/或定向载具608的图像以与渲染的表面658对齐)。在示例渲染800中,对象808对应于载具608的调整的渲染。类似地,渲染800中的对象810对应于载具610的所调整渲染。
114.尽管未示出,然而可以在渲染650中表示的其他对象可以包括基础设施、建筑物、道路标记、行人或可以调整其渲染的其他非载具。在一些示例中,耦合到载具的lidar设备可以发送关于环境中除了载具之外的对象的信息。例如,载具608的一个或多个lidar设备(例如lidar设备614)可用于确定载具608的环境中的对象的深度,并且载具610的一个或多个lidar设备(例如lidar设备616)可用于确定载具610的环境中的对象的深度。在一个示例中,每个载具602、608和610可以基于由相应载具的lidar设备提供的测量生成渲染。在一些实现方式中,载具602、608和610可以彼此共享lidar测量(通过lidar通信),并且载具602可以使用组合的lidar测量来生成比渲染650更全面的对环境600的渲染。
115.在一些实现方式中,可以在载具602的显示器上显示任何合适的更新的渲染。例如,可以为尚未在载具602的lidar设备的范围或los内的环境区域生成更新的渲染。载具610可以检测载具610后面的街道附近的对象(例如,使用lidar设备616),这可以用于渲染
不在载具612的视场内的环境600。载具610可以将该环境的至少一部分的渲染信息(例如,行人、骑自行车的人、停放的汽车、交通锥、障碍物、堵塞物等的渲染信息)发送到载具602。以这种方式,载具602可以使用渲染信息以包括关于渲染650右侧的环境600的附加信息(从载具602的lidar设备612的视场看,其被建筑物606挡住)。在一些方面,渲染信息可以在多个载具和基础设施之间共享,并且特定载具(例如载具602)的渲染可以包括远远超出载具的区域。例如,关于距载具610多跳的载具的环境的渲染信息可以通过这些跳被发送到载具610,然后发送到载具602。然后载具602可以使用渲染信息来扩展载具602生成的渲染所覆盖的区域。
116.除了更新渲染之外,接收到的数据还可用于自主载具的导航或其他自动化操作。例如,更新的渲染可以指示额外的障碍物或堵塞物,且因此载具可以导航(例如更新其导航)以在操作期间避开额外的堵塞物。返回分别参考图6b和图8中的渲染650和800,渲染650没有示出载具610的后部,但更新后的渲染800示出了载具610的全部。如果载具602的路线被确定为与基于接收的数据确定的载具610的端部碰撞,则可更新载具602的导航来避开载具610。在另一示例中,可基于更新的渲染通知驾驶员和/或乘客可能的碰撞或障碍物。例如,可以将包括障碍物或堵塞物的更新的渲染显示给驾驶员和/或乘客,或可通知驾驶员和/或乘客障碍物或堵塞物。以这种方式,可以在障碍物或堵塞物出现在乘坐者之前,向载具的乘坐者告知路线变化、载具减速或自主载具导航的其他变化。另外,或作为替代,可以向包括载具的车队的调度员或中央办公室通知障碍物或堵塞物,以解释调整载具导航的原因。
117.除了更新渲染650以包括载具(或环境中的另一对象)的模型或其他代表性图像之外,渲染650可以被更新为包括模型的纹理。例如,同一车队内载具的渲染可以被调整为具有相似纹理以指示属于同一车队。
118.图9a示出了图6a中的环境600的示例渲染900,其中载具608和载具602属于同一车队。如图所示,渲染900中的对象902和908可以被相似地纹理化(例如阴影化)。与不是同一车队的部分的载具610相对应的对象910可以与对象902和908不同地纹理化。例如,对象910可以包括与对象902和908不同的阴影。比如基础设施、建筑物、道路、载具等对象可以各自根据对象的类型被不同地纹理化。例如,可以使用相同的纹理来渲染站,使用相同的纹理渲染紧急载具等。以这种方式,驾驶员和/或乘客可基于显示的渲染中的纹理容易地识别环境中的相似对象。在一些实现方式中,更新渲染可以包括突出显示对象渲染。例如,可以突出显示紧急载具的渲染来通知载具的乘坐者存在紧急载具。类似地,可以突出显示环境的施工区、安全区或其他区域,来通知载具乘坐者环境中它们的存在。
119.图9b示出了环境670(图6c)的示例更新的渲染950。更新的渲染950包括紧急载具678的渲染952。渲染952可以被突出显示以指示载具678是紧急载具。渲染952还可包括渲染670中最初不包括的、针对载具674包括的代表性图像954和针对载具676包括的代表性图像956。
120.返回参考图6c中的环境670,可从耦合到载具672的lidar设备的los阻挡载具676和紧急载具678。结果,图6d中的渲染690(基于来自lidar设备的测量)不包括载具676和紧急载具678的渲染。在一些实现方式中,耦合到载具672的lidar设备可从耦合到载具676或紧急载具678的lidar设备接收调制光信号的反射。调制光信号可以包括指示存在紧急载具
678的数据。该数据还可以指示关于紧急载具的其他信息,比如紧急载具的类型,紧急载具678是否正在响应于紧急情况和/或紧急载具的行驶路径、速度等。该数据还可以包括关于其他载具或对象的信息。例如,该数据可以指示存在载具676。
121.在一些其他实现方式中,载具672可以从中间设备接收关于紧急载具678的数据。载具676可以感测紧急载具678的存在(比如经由耦合到载具676的lidar设备)。载具676可以经由调制光信号680将关于紧急载具678的数据发送至los内的载具674。载具674然后可以经由调制光信号682将关于紧急载具678的数据发送至los内的载具672。尽管示出了用于发送数据的一个中间节点,然而通过数据可以执行任何数目的跳。在载具672接收关于紧急载具678的数据(和关于载具676的数据)时,载具672可以更新渲染690以填入建筑物684引起的遮挡的部分,以及突出显示或以其他方式指示紧急载具678的存在。除了突出显示紧急载具之外或作为替代,载具672可通过例如闪烁显示器、提供声音通知、将特殊纹理应用于渲染和/或在显示器上提供文本通知来通知驾驶员和/或乘客。尽管参考紧急载具(比如救护车)描述了图6c、6d和9b的示例,但是操作也可应用于任何载具、对象或感兴趣的区域(比如施工区、学校区、事故区等)。
122.在一些实现方式中,环境中的对象的渲染信息可以经由软件即服务(saas)模型来提供。例如,对象的唯一标识符可以被载具602接收。载具602然后可以与服务通信(例如通过蜂窝调制解调器或其他通信装置)以获得对象的渲染信息。例如,载具602可以接收载具608的载具识别号,并且载具602可以与存储多个对象(包括载具608)的渲染信息的远程服务器通信。远程服务器可以响应于请求提供载具608的渲染信息,并且渲染信息可以由载具602使用以更新渲染。
123.在一些其他实现方式中,载具602可以存储对象的渲染信息,并且远程服务器可以提供针对载具602没有本地存储的对象的渲染信息。附加地或可替代地,远程服务器可以用于更新本地存储的渲染信息。例如,当发布新品牌和型号的载具时,可以创建载具的渲染信息然而尚未存储在载具602的存储器中。lidar通信可用于将载具602的本地存储的渲染信息更新为包括新渲染信息。在一些实现方式中,载具602可在通过专用回程耦合到站(比如图4的站408)时更新其存储的渲染信息。
124.存在用于lidar通信的其他用例,且本公开不限于以上示例。例如,设备(比如载具)可包括周期性要求更新的软件或固件。lidar设备可用于从其他设备接收软件更新。例如,可以将包括新品牌和型号的载具的渲染信息的软件更新提供给载具的第一子集。这些载具然后可以经由lidar通信将更新发送至环境中的其他载具。以这种方式,可以在不需要所有载具连接到中央位置(比如存储更新的服务器)的情况下快速分发更新。例如,设备(比如载具和基础设施)之间的通信可以与点对点网络相似,并且可以在不需要中央存储库来下载更新的情况下跨设备传播更新。另一示例用例可以包括设备之间的音频和视频传输(比如用于语音呼叫、消息传递或视频会议)。
125.一般而言,一个或多个操作可基于经由用于lidar通信的调制光信号接收的数据。如本文所述,lidar通信可用于提供数据从而例如影响自主载具的导航、向驾驶员或乘客提供通知、调整对位置的访问等。
126.图10示出了描绘示例操作1000的流程图,该操作1000用于基于从lidar发送器的发送中接收的数据执行一个或多个操作。尽管出于解释本公开方面的目的,在设备执行一
个或多个操作方面讨论图10。操作1000可以由载具、基础设施、协调载具车队的调度员或中央办公室、耦合到载具的处理系统(比如娱乐系统)、适当的控制系统(比如耦合到载具以进行水平4自助驾驶的控制系统)等来执行。示例操作1000不限于由特定设备执行或执行特定设备操作。
127.从1002开始,设备可以接收与发送lidar设备发射的调制光信号相关联的数据。例如,设备(例如载具、处理系统等)可以耦合到被配置为从单独的发送lidar设备接收调制光信号的lidar设备。接收lidar设备的接收器可以接收调制光信号,该调制光信号可以包括被调制为携带包括数据的数据信号的光载波信号。载波信号可以是通常用于检测和测距的信号。接收lidar设备(或耦合到接收lidar设备的设备)可以解调调制光信号以生成和提供调制光信号中提供的数据。以这种方式,设备(例如处理系统或载具)可以接收与调制光信号相关联的数据。在一些实现方式中,数据可以包括一个或多个分组。返回参考图3,示例分组可以包括特定于例如定位载具、使用载具访问特定区域或位置、对象渲染等的信息。
128.返回参考图10,设备可以基于接收到的数据确定要执行的一个或多个操作(1004)。例如,设备可以基于接收到的一个或多个分组来确定一个或多个操作。在一些实现方式中,设备可以确定一个或多个载具定位器操作(1006)。在一个示例中,如果载具在数据中接收到载具将被定位的信息,则载具可以确定返回指定地点(例如包括站的停车空间,如图4所示)并与站进行通信(通过lidar通信)载具的位置和当前状态。在另一示例中,如果设备接收到关于丢失载具的信息并且设备最近与丢失载具通信过,则设备可以与载具、基础设施、调度员等通信最后接收的关于丢失载具的位置和其他信息。另外或作为替代,设备可以通过lidar通信将丢失载具消息传播到其他载具和设备。
129.在一些其他实现方式中,设备可以确定一个或多个载具叫车操作(1008)。返回参考图4,如果站408是自动出租车车队的步行站,则站408可以通过lidar通信与载具通信载具被分配给特定客户和乘坐。载具可以通过耦合到载具的lidar设备和耦合到站且位于载具排队的单独场所中的lidar设备之间的lidar通信从站408接收数据。基于接收到的数据,载具可以接近站408附近的空间并且与站408通信关于分配给载具的乘坐或客户的信息。站408可以通知客户载具已经到达,使得客户可以上车。在另一个示例中,载具或设备可以确定要通知驾驶员(例如出租车驾驶员)分配给载具的客户和/或乘坐。出租车驾驶员可以基于通知接近客户以便开始乘坐。
130.返回参考图10,在一些进一步的实现方式中,设备可以确定一个或多个通知操作(1010)。在一些示例中,返回参考图5,载具506可以接收救护车502或其他紧急载具在附近的数据。载具506可以靠边停在路边、停下或以其他方式调整载具的操作或导航以允许救护车502安全通过。另外或作为替代,载具506或另一设备可以确定向驾驶员和/或乘客通知救护车502的存在。在一些其他示例中,载具506或设备可以确定通过lidar通信将救护车502的存在指示给其他载具、基础设施或其他设备(从而将该指示传播给救护车502的区域内的其他载具和基础设施)。
131.在通知操作的另一个示例中,载具可以接收关于停车库中可用停车位的数据。因此,载具可以行驶到可用空间之一并停放在其中。载具或设备可以确定通知驾驶员和/或乘客可用空间(例如在显示的停车库地图上指示可用空间)等。其他示例通知操作可以包括:基于沿着当前路线上的事故或交通状况的通知更新路线,经由lidar通信通知其他载具事
故或交通状况,通知驾驶员和/或乘客路线或交通情况的变化等。
132.返回参考图10,在一些其他实现中,设备可以确定一个或多个有限访问区域操作(1012)。例如,如果市中心限于自主载具、零排放载具或其他特定类型的载具,则载具可以从耦合到载具的lidar设备接收与访问限制相关联的数据。lidar设备可以接收由耦合到基础设施或其他合适设备的lidar设备发送的调制光信号中的数据。例如,大门、收费亭、站等可以包括lidar设备以向载具发送访问限制的指示。载具可以基于该指示确定载具是否被允许进入该区域。如果载具被允许,则载具还可以确定一个或多个导航操作以访问该区域。例如,如果访问限于自主载具,则自主载具可进入市中心。另外,或作为替代,载具可以确定向驾驶员和/或乘客通知接近的有限访问区域和访问的限制。在一些示例中,驾驶员可以基于通知确定是否访问该区域。在一些进一步的示例中,可以通知载具访问特定区域的通行费或收费。例如,城市的桥梁、车道或区域可以与访问费相关联。载具可以在访问有限区域的基础设施之前通过lidar通信提供账户或其他支付信息(例如在过桥之前向收费亭提供支付)。在一些示例中,可以将收费通知驾驶员和/或乘客。
133.由于区域的限制可能会基于当前情况(例如一天中的某个时间、星期几、当前的交通拥塞、烟雾水平、需要将区域限制为紧急载具的情况等)而改变,可以传达限制的这种变化。作为响应,载具可以例如确定通知驾驶员和/或乘客该区域的访问限制的变化,调整路线以在新限制区域周围导航,或通过lidar通信将变化通知给其他载具。
134.返回参考图10,在一些进一步的实现中,设备可以确定一个或多个可视化或渲染操作(1014)。例如,可以渲染载具的环境、lidar设备、基础设施或其他合适的设备(例如生成点云、环境的映射(mapping)、深度图等),并且可以将渲染显示给驾驶员和/或乘客。返回参考图6a和6b,载具602(或耦合到载具602的另一合适的设备,例如娱乐系统、处理系统等)可以从lidar设备612提供的数据生成渲染650。载具602(或其他合适的设备)也可以在来自相应的lidar设备614和616的发送中接收载具608和610的一个或多个标识符。载具602(或其他合适的设备)因此可以基于接收到的标识符确定载具608和610的渲染信息(例如在载具或设备的存储器中查找信息,与远程服务通信以提供用于一个或多个对象的渲染信息,确定在来自相应lidar设备的发送中编码的渲染信息等)。渲染操作因此可以包括使用确定的渲染信息来更新渲染650。例如,图6b中的渲染650可以基于用于更新渲染的、载具608和610的代表性图像(例如,模型)而被更新为图8中的渲染800。其他示例渲染操作可以包括对紧急载具应用定义的纹理、对类似类型的对象应用类似的纹理、应用特定于环境中的每个载具或对象且与唯一标识符(比如图3中的唯一发送器id 302)相关联的唯一纹理等。在一些示例中,载具602或其他合适的设备可以确定要向驾驶员和/或乘客显示环境的更新的渲染。渲染操作还可以包括联系远程服务以更新存储的渲染信息数据库,基于接收新渲染信息(例如载具的新品牌和型号)更新数据库,或通过与环境中的其他载具或设备的lidar通信传播对渲染信息的更新。
135.返回参考图10,设备然后可以指示执行一个或多个操作(1016)。例如,如果确定了一个或多个渲染操作,则设备可以指示显示器或耦合到显示器的另一设备显示渲染并显示更新的渲染。在另一示例中,如果设备是载具并且一个或多个操作是有限访问区域操作,则载具可以指示一个或多个载具组件将载具导航进或出该区域。该设备还可以向驾驶员和/或乘客提供用于显示关于有限访问区域的信息的指令。
136.尽管从载具的角度描述了图10中示例操作1000的一些示例过程,然而任何合适的设备可以执行一个或多个相关联操作。例如,站(或耦合到站的处理系统)可响应于从丢失载具接收lidar发送来执行载具定位器操作(比如联系调度员)。在另一示例中,站可以响应于从被叫车的载具接收lidar发送来执行载具叫车操作(比如通知客户载具已到达)。在另一示例中,站可以响应于接收lidar发送中的通知来执行通知操作(比如发送区域中救护车的通知)。在另一示例中,收费亭或门可以响应于从区域中的基础设施或载具的lidar设备接收到交通拥塞的更新来执行有限访问区域操作(比如改变区域的访问费用或访问限制)。如上所述,示例操作1000不限于由特定设备(比如载具)执行。
137.另外,尽管单独描述了示例操作(比如乘坐叫车、访问限制、更新的渲染等),然而设备可被配置为执行任何数目的操作和操作的组合。例如,设备可被配置为更新关于紧急载具的渲染,通知载具乘坐者存在紧急载具,基于存在紧急载具更新限于载具的区域,以及更新载具的导航以避开受限制的区域。
138.本领域技术人员应理解,可使用各种不同技术和技艺中的任何一种来表示信息和信号。例如,遍及以上描述可能提及的数据、指令、命令、信息、信号、位、符号和芯片可由电压、电流、电磁波、磁场或颗粒、光场或颗粒或其任何组合来表示。另外,本领域技术人员应理解,在解释本公开方面时出于说明目的提供了示例。本公开的方面可由任何合适的设备(比如自主载具、自主载具车队、基础设施、载具或基础设施的控制系统、耦合到载具的娱乐系统或其他设备)来执行,且不限于本文的特定示例。
139.此外,本领域技术人员应理解,结合本文公开的方面所描述的各种示例性逻辑块、模块、电路和算法步骤可实现为电子硬件、计算机软件或这二者的组合。为了清楚说明硬件和软件的可交换性,以上总体在其功能性方面描述了各种组件、块、模块、电路和步骤。该功能性实现为硬件还是软件取决于对整体系统施加的特定应用和设计限制。熟练的技术人员可针对每个特定应用以各种方式实现所述功能性,然而该实现决策不应被理解为造成与本公开范围的偏离。例如,载具或其他合适设备的处理系统可包括一个或多个处理器以及耦合到一个或多个处理器的存储器。存储器可包括一个或多个处理器执行以使设备执行本文所述操作的指令。处理系统还可耦合到用于lidar通信和表面的检测和测距的一个或多个lidar设备。在一些方面,处理系统可以包括被配置为执行一个或多个操作的专用硬件,比如一个或多个集成电路。
140.因此,结合本文公开的方面描述的方法、序列或算法可以直接以硬件、以处理器执行的软件模块或二者的组合来实施。软件模块可驻留在ram存储器、闪存、rom存储器、eprom存储器、eeprom存储器、寄存器、硬盘、可移除盘、cd-rom或本领域已知的任何其他形式的存储介质中。示例存储介质耦合到一个或多个处理器(比如直接连接或远程耦合),使得一个或多个处理器可从存储介质读取信息以及向存储介质写入信息。在替代做法中,存储介质可以是一个或多个处理器的集成部分。
141.在前述说明中,参考其特定示例实施方式描述了示例实施方式。然而,明显的是,可以在不脱离所附权利要求阐述的本公开更广泛范围的情况下对其进行各种修改和变化。例如,尽管载具被一般性示为汽车,然而可以使用任何合适的载具,比如摩托车、无人机、飞机、船只、直升机等。此外,载具可以包括一个或多个lidar设备,或载具可耦合到与载具分离制造的lidar设备。载具还可包括一个或多个处理系统、娱乐系统、控制系统等,或载具可
耦合到与载具分离制造的该处理系统、娱乐系统、控制系统。例如,一个或多个lidar设备可附着到汽车的不同部分以确保覆盖汽车周围的环境。lidar设备可耦合到汽车的处理系统(或耦合到载具的控制系统),且提供其他lidar设备发送的数据以用于处理,或经由调制光信号将处理系统提供的数据发送至其他lidar设备。
142.因此在说明的意义上而不是在限制的意义上理解说明书和附图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1