测距装置、以及检测测距装置的窗口的污垢的方法与流程
测距装置、以及检测测距装置的窗口的污垢的方法
1.相关申请的交叉引用
2.本技术主张基于2019年10月4日申请的日本技术号2019-183438的日本专利申请、以及2020年9月24日申请的日本技术号2020-159470的日本专利申请的优先权,通过参照将这些公开的全部内容编入本技术。
技术领域
3.本公开涉及检测测距装置的窗口的污垢的技术。
背景技术:
4.在jp2016-176750a中,公开了照射脉冲光并接收被外部物体反射的反射光,根据光的飞行时间来测定距外部物体的距离的测距装置。
5.在上述的测距装置中,若在测距装置的窗口附着污垢,则s/n比降低而无法正确地测定距外部物体的距离。然而,以往的实际情况是,对于检测在测距装置的窗口是否附着有污垢的技术,并未充分研究。
技术实现要素:
6.根据本公开的一个方式,提供一种测距装置。该测距装置具备:发光部,发出脉冲光;受光部,接收被外部物体反射的上述脉冲光的反射光;运算部,使用由上述受光部接收到的上述反射光的飞行时间,来计算距上述外部物体的距离;壳体,是收纳上述发光部和上述受光部的壳体,且上述壳体具有使上述脉冲光和上述反射光通过的窗口;以及判定部,当预先规定的污垢判定条件成立时,判定为在上述窗口存在污垢,上述污垢判定条件包含第一条件,该第一条件为“关于上述测距装置的视野范围内的至少一个像素,相当于从上述发光部到上述窗口的光路的距离的特定飞行时间下的受光强度为强度阈值以上”。
7.根据该测距装置,由于对于特定飞行时间下的受光强度,当污垢检测条件成立时判定为在窗口存在污垢,因此能够根据受光强度来检测在窗口是否有污垢。
附图说明
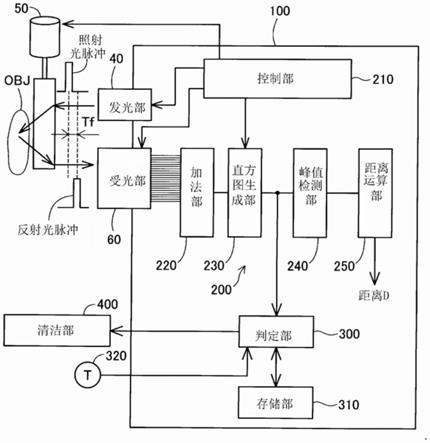
8.图1是测距装置的示意结构图。
9.图2是表示光学系统的示意结构图。
10.图3是示意性地表示受光阵列的结构的说明图。
11.图4是示意性地表示像素所包含的受光元件的结构的说明图。
12.图5是运算判定部的示意结构图。
13.图6是在窗口没有污垢的初始状态的直方图。
14.图7是窗口污垢检测处理时的直方图。
15.图8是示意性地表示包含污垢检测用的像素的受光阵列的结构的说明图。
16.图9是示出对每个像素块进行距离测定和污垢检测的情况的说明图。
17.图10是表示窗口污垢检测处理的步骤的流程图。
18.图11是表示在视野范围内的多个像素位置在窗口有污垢的情况的说明图。
具体实施方式
19.如图1所示,测距装置20收纳于壳体90,该壳体90在前表面具有窗口92。在窗口92的附近,设置有执行用于去除窗口92的窗口污垢的去除动作的清洁部400。本实施方式的清洁部400包含清洗部410、411、和加热器部420。清洗部410、411用于通过向窗口92的表面喷射水来去除窗口92的表面的污垢。在本例中,设置有去除窗口92的左侧的污垢的第一清洗部410和去除窗口92的右侧的污垢的第二清洗部411,但也可以设置三个以上的清洗部。换言之,也可以设置分别负责去除窗口92的多个不同的区域的污垢的多个清洗部。或者,也可以通过一个清洗部去除整个窗口92的污垢。进一步,也可以代替水而喷射空气,也可以将清洗部构成为能够喷射水和空气双方。加热器部420用于利用沿着窗口92设置的加热线对窗口92加热,使附着于窗口92的表面的雪、冰融化。作为清洁部400,也可以采用这些结构以外的结构,例如,也可以将擦拭窗口92的擦拭器部用作清洁部400。
20.测距装置20具备射出用于测距的脉冲光并接受来自外部物体的反射光的光学系统30和处理从光学系统30得到的信号的运算判定部100。外部物体也称为“对象物”或者“目标”。光学系统30具备射出作为脉冲光的激光的发光部40、使激光在预先规定的视野范围80内扫描的扫描部50、以及用于接收包含来自外部物体的反射光、干扰光的入射光的受光部60。
21.测距装置20例如是搭载于汽车等车辆的车载用的lidar(laser imaging detection and ranging:激光雷达)。当车辆行驶于水平的路面时,视野范围80的横向与水平方向x一致,纵向与铅垂方向y一致。由测距装置20测定出的距离等信息被作为外部装置的距离接收部500接收并利用。距离接收部500具有将各种信息通知给用户的通知部510。通知部510例如是设置于客舱内的显示部、扬声器等。距离接收部500例如是包含车辆的ecu(electronic control unit:电子控制单元)的控制装置。
22.如图2所示,发光部40具备射出测距用的激光的半导体激光元件(以下,也仅称为激光元件)41、设置有激光元件41的驱动电路的电路基板43、以及使从激光元件41射出的激光成为平行光的准直透镜45。激光元件41是能够振荡所谓的短脉冲激光的激光二极管。在本实施方式中,激光元件41通过使多个激光二极管沿着铅垂方向排列而构成矩形状的激光发光区域。也将激光元件41称为“光源”。
23.扫描部50由所谓的一维扫描仪构成。扫描部50包括反射镜54、旋转螺线管58以及旋转部56。反射镜54反射通过准直透镜45而成为平行光的激光。旋转螺线管58接受来自运算判定部100的控制信号,在预先规定的角度范围内反复进行正转以及反转。旋转部56由旋转螺线管58驱动,以将铅垂方向作为轴向的旋转轴反复进行正转以及反转,使反射镜54在沿着水平方向的一个方向上扫描。经由准直透镜45从激光元件41入射的激光被反射镜54反射,通过反射镜54的旋转而沿着水平方向扫描。图1所示的视野范围80相当于该照射光的扫描范围。由于在视野范围80内的各像素位置得到受光强度,因此视野范围80内的受光强度的分布构成一种图像。因此,也可以将视野范围80称为“图像区域”。此外,也可以省略扫描部50,从发光部40遍及视野范围80内的整体射出脉冲光,并且通过受光部60接收遍及视野
范围80内的整体的反射光。也将表示视野范围80内的受光强度的分布的数据的集合称为“帧”。对每一帧执行距离测定。
24.若存在人、车等外部物体,则从测距装置20输出的激光在外部物体的表面漫反射,该激光的一部分作为反射光返回到扫描部50的反射镜54。该反射光被反射镜54反射,与干扰光一同作为入射光入射至受光部60的受光透镜61,被受光透镜61聚光并入射至受光阵列65。
25.如图3所示,受光阵列65由二维排列的多个像素66构成。如图4所示,一个像素66由排列为在水平方向为h个且在铅垂方向为v个的多个受光元件68构成。h以及v分别为1以上的整数。在本实施方式中,h=v=5,在水平方向以及铅垂方向上分别由5个受光元件68构成。但是,能够由任意数量的受光元件68构成像素66,也可以由一个受光元件68构成像素66。在本实施方式中,也将构成一个像素66的受光元件68的数量(h
×
v)称为“像素尺寸”。在本实施方式中,作为受光元件68使用spad(single photon avalanche diode:单光子雪崩二极管),但也可以使用pin光电二极管等其它种类的受光元件。一个像素66的受光结果是视野范围80内的一个像素位置上的受光强度。从该说明可以得知,构成受光阵列65的“像素66”是指硬件,以与构成视野范围80的“像素”不同的含义使用。但是,由于像素66的受光结果被用作视野范围80内的一个像素的受光强度,因此两者之间存在对应关系。
26.各受光元件68在电源vcc与接地线之间串联地连接淬灭电阻器rq和雪崩二极管da,将它们的连接点的电压输入至反转元件inv,转换为电压电平反转后的数字信号。反转元件inv的输出被输入至“与”电路sw的一个输入端子。向“与”电路sw的另一个输入端子输入选择信号sc。选择信号sc用于指定读取来自受光阵列65的哪个受光元件68的信号。即,若将选择某受光元件68的选择信号sc从低电平切换至高电平,则从该受光元件68输出反映了雪崩二极管da的状态的输出信号sout。将选择信号sc切换至高电平的定时相当于反射光的飞行时间。因此,在发出一次脉冲光后,在相当于多个飞行时间的多个定时分别将选择信号sc从低电平切换至高电平。
27.输出信号sout是通过接收入射光而产生的脉冲信号,该入射光包含照射光被存在于扫描范围的外部物体反射而返回的反射光、干扰光。多个飞行时间下的受光元件68的输出信号sout被依次输入至运算判定部100。
28.如图5所示,运算判定部100包含运算部200、判定部300以及存储部310。运算部200使用由受光部60接收到的反射光的飞行时间tf,来运算距外部物体obj的距离d。运算部200具备进行运算判定部100整体的控制的控制部210、加法部220、直方图生成部230、峰值检测部240以及距离运算部250。
29.加法部220是将构成受光阵列65的像素66中包含的受光元件68的输出相加的电路。若入射光脉冲入射至一个像素66,则像素66中包含的各受光元件68进行动作。如上述那样,在本实施方式中,作为受光元件68使用spad,由多个spad构成像素66。对于spad而言,只要入射一个光子就能够对其进行检测,但利用来自外部物体obj的有限的光进行的spad的检测必然是概率性的。加法部220将来自只能概率性地检测入射光的spad的输出信号sout相加。
30.直方图生成部230通过将加法部220的相加结果多次相加,来生成受光强度的直方图,并将该直方图输出至峰值检测部240。该直方图是表示多个飞行时间中的每个飞行时间
下的受光强度的图表。受光强度是一个像素66内的受光的spad个数的合计。多个飞行时间以一定的间隔来设定。峰值检测部240对从直方图生成部230输入的直方图的受光强度进行分析,检测受光强度的峰值,并确定检测到的峰值的飞行时间。检测到的峰值的飞行时间相当于被外部物体obj反射的光的飞行时间tf。距离运算部250使用光的飞行时间tf,来运算距外部物体obj的距离d。
31.判定部300使用受光部60中的受光强度来执行窗口92的污垢检测处理。在本实施方式中,判定部300使用由直方图生成部230生成的直方图来作为表示受光部60中的受光强度的信息。对于窗口92的污垢检测处理的详细内容在后叙述。当判定为在窗口92有污垢时,根据来自判定部300的指示,清洁部400执行用于去除窗口92的污垢的去除动作。在判定部300连接有用于测定外部空气温度的温度传感器320。但是,可以省略温度传感器320。
32.存储部310存储测距装置20的视野范围80内的阈值设定值的分布。所谓的“阈值设定值”是用于确定在窗口污垢检测处理中使用的强度阈值的值,预先设定并储存于存储部310。对于强度阈值、阈值设定值在后进一步叙述。
33.如图6以及图7所示,由直方图生成部230生成的直方图是表示多个飞行时间tf中的每个飞行时间下的受光强度i的图表。图6表示在窗口92没有污垢的初始状态的直方图的例子,图7表示窗口污垢检测处理时的直方图的例子。在图6以及图7中使用的附图标记的含义如下。此外,末尾为“0”的附图标记表示初始状态,末尾为“1”的附图标记表示窗口污垢检测处理时。以下,主要对图7所示的窗口污垢检测处理时的附图标记的含义进行说明。
34.(1)cl0、cl1:杂波峰值
35.杂波峰值cl1是在相当于从发光部40到窗口92的光路的距离的特定飞行时间tc出现的受光强度的峰值。将由窗口92反射的反射光称为“杂波光”。
36.(2)tc:杂波峰值的飞行时间
37.杂波峰值的飞行时间tc是相当于从发光部40到窗口92的光路的距离的特定飞行时间。
38.(3)tp0、tp1:目标峰值
39.目标峰值tp1是对应于来自外部物体的反射光的受光强度的峰值。
40.(4)tt:目标峰值的飞行时间
41.目标峰值的飞行时间tt是对应于从发光部40到外部物体的距离的飞行时间。
42.(5)imax:受光强度i可取的最大值
43.受光强度i可取的最大值imax是在创建直方图时使用的每一个像素的受光元件68的总数。如在图4中说明的那样,一个像素66由h
×
v个受光元件68构成。在将n设为2以上的整数时,当对n次发光的受光结果进行合计并创建直方图时,受光强度i可取的最大值imax等于n
×h×
v。
44.(6)h0、h1:杂波峰值水平
45.杂波峰值水平h1是杂波峰值cl1的高度的绝对值。以下,也将杂波峰值水平h1仅称为“峰值水平h1”或者“受光强度h1”。
46.(7)it0、it1:杂波峰值的强度阈值
47.杂波峰值cl1的强度阈值it1在判断污垢检测条件中的“关于测距装置20的视野范围80内的至少一个像素,特定飞行时间tc下的受光强度为强度阈值it1以上”这样的第一条
件是否成立时使用。强度阈值it1通常被设定为小于受光强度i可取的最大值imax的值,但也可以设定为等于最大值imax的值。对于窗口污垢检测处理时的强度阈值it1的确定方法在后面叙述。
48.(8)bl0、bl1:直方图的基线水平
49.直方图的基线水平bl1是直方图中的峰值以外的信号值的平均值。
50.(9)α:阈值设定值
51.该阈值设定值α是从强度阈值it1减去基线水平bl1所得的值。换言之,能够通过对基线水平bl1加上该阈值设定值α来确定强度阈值it1。但是,如后述那样,也能够通过其他方法来确定强度阈值it1。
52.(10)(imax0-bl0)、(imax-bl1):有效信号范围宽度
53.有效信号范围宽度(imax-bl1)是从受光强度i可取的最大值imax减去基线水平bl1所得的值。
54.如图6所示,在窗口92没有污垢的初始状态下的典型的直方图中,出现与来自外部物体的反射光对应的目标峰值tp0。根据该目标峰值tp0的飞行时间tt来确定距外部物体的距离。图6的直方图还包含作为针对窗口92上的反射光的峰值的杂波峰值cl0。杂波峰值cl0是相当于从发光部40到窗口92的光路的距离的特定飞行时间tc下的受光强度。该杂波峰值cl0具有在窗口92没有污垢的状态下,例如工厂出厂时的峰值水平h0(以下,称为“初始杂波峰值水平h0”)。此外,出现杂波峰值cl0的特定飞行时间tc按视野范围80内的每个像素位置而不同。其理由是因为在图1中,从发光部40到窗口92的光路的光路长度按视野范围80内的每个像素位置而不同。另外,一般各像素位置上的初始杂波峰值水平h0也按每个像素位置而不同。
55.此外,在通常的测距装置中,由于窗口92存在的位置不成为测距对象,因此无需在出现杂波峰值cl1的特定飞行时间tc获取受光强度i的测定值。在本实施方式中,一个特征在于,为了利用杂波峰值cl1来检测窗口92的污垢,而在特定飞行时间tc获取受光强度i的测定值。
56.如图7的例子所示,窗口污垢检测处理时的直方图中的目标峰值tp1以及杂波峰值cl1的水平一般与初始状态下的目标峰值tp0以及杂波峰值cl0的水平不同。例如,当在窗口92存在污垢时,该杂波峰值水平h1变得比初始杂波峰值水平h0高。另外,当在窗口92存在污垢时,针对相同的外部物体的目标峰值tp1的水平也变低的情况较多。
57.窗口污垢检测处理时的基线水平bl1被有无太阳等外部光源等外部环境影响。例如,当存在较强的太阳光时,基线水平bl1表示极高的值。此时,杂波峰值水平h1也同样地升高。因此,优选考虑到这样的外部环境的影响,适当地确定窗口污垢检测处理时的强度阈值it1。对于这一点在后面进一步叙述。
58.作为窗口污垢检测处理时的强度阈值it1的确定方法,例如可考虑以下那样的方法a~c。
59.<强度阈值的确定方法a>
60.将窗口污垢检测处理时的强度阈值it1设定为恒定值。
61.在该情况下,也可以将强度阈值it1设定为视野范围80内的所有像素共用的一个值,或者也可以对视野范围80内的每个像素分别设定强度阈值it1,作为阈值设定值储存于
存储部310内。在前者的情况下,可以省略存储部310。但是,若对视野范围80内的每个像素设定强度阈值it1,则能够设定高于每个像素的初始杂波峰值水平h0的强度阈值it1,因此存在能够更正确地执行窗口污垢检测处理这样的优点。
62.<强度阈值的确定方法b>
63.将对直方图的基线水平bl1加上作为固定值的阈值设定值α所得的值设为窗口污垢检测处理时的强度阈值it1。
64.it1=bl1+α
…
(1)
65.在这里,阈值设定值α是预先设定为在初始状态下应用上述(1)式时的运算结果(bl0+α)比初始杂波峰值水平h0充分大的值。阈值设定值α也可以设定为视野范围80内的所有像素共用的一个值、或者也可以对视野范围80内的每个像素分别设定强度固定值α并储存于存储部310
66.内。根据该方法b,具有能够考虑有无外部光源等外部环境的影响而适当地确定窗口污垢检测处理时的强度阈值it1这样的优点。此外,阈值设定值α也可以根据像素尺寸(h
×
v)、生成直方图时的发光次数n来确定。例如,也可以使用以下的任意一个式子来确定阈值设定值α。
67.α=α0
×
(h
×
v)
68.α=α0
×n69.α=α0
×
(h
×
v)
×n70.在这里,α0是预先规定的恒定值。像素尺寸(h
×
v)如在图4中说明的那样,是一个像素66所包含的spad的数量。
71.<强度阈值的确定方法c>
72.将对有效信号范围宽度(imax-bl1)乘以阈值设定值β,并对该相乘结果加上基线水平bl1所得的值设为窗口污垢检测处理时的强度阈值it1,其中,阈值设定值β为不足1的系数。
73.在这种情况下,窗口污垢检测处理时的强度阈值it1能够通过下式来计算。
74.it1=(imax-bl1)
×
β+bl1
…
(2)
75.在这里,阈值设定值β是预先设定为在初始状态下应用上述(2)式时的运算结果{(imax-bl0)
×
β+bl0}比初始杂波峰值水平h0充分大的值。阈值设定值β也可以设定为视野范围80内的所有像素共用的一个值,或者也可以对视野范围80内的每个像素设定并储存于存储部310内。根据该方法c,与上述的方法b同样地,存在能够考虑外部环境的影响,而适当地确定窗口污垢检测处理时的强度阈值it1这样的优点。另外,该方法c还具有以下优点:由于在来自外部的光极强而基线水平bl1变高的情况下,也能够将窗口污垢检测处理时的强度阈值it1维持在小于受光强度的最大值imax的值,因此能够更正确地执行窗口污垢检测处理。
76.此外,在用于确定强度阈值it1的阈值设定值按视野范围80的每个像素而不同时,优选将视野范围80内的阈值设定值的分布存储于存储部310。优选在视野范围80内的所有像素位置存储阈值设定值,但也可以仅在拉长间隔后的像素位置存储阈值设定值,从而存储视野范围80内的阈值设定值的分布。在后者的情况下,在计算各像素位置上的强度阈值it1时,能够通过插值来确定各像素位置上的阈值设定值。
77.如图8的例子所示,也可以使用除了距离测定用的像素66以外,还包含污垢检测用的像素67的受光阵列65a。即,受光部60也可以除了距离测定用的像素66以外,还包含窗口92的污垢检测用的像素67。污垢检测用的像素67配置于距离测定用的像素66的附近。具体而言,优选污垢检测用的像素67配置为当在窗口92没有污垢时不对污垢检测用的像素67施加杂波光,当在窗口92有污垢时对污垢检测用的像素67施加杂波光。当在窗口92有污垢时,在距离测定用的像素66中杂波峰值增大,并且向其周边的杂波光增加。若在该位置配置污垢检测用的像素67,则能够通过有无向该像素67的光输入来判定有无污垢,而具有能够以更简单的运算来实现污垢检测这样的优点。
78.另外,如图9所示,也可以将受光阵列65所包含的多个像素66分割为多个像素块并进行时分处理,在同一定时实施距离测定和污垢检测。在图9的例子中,将多个像素66分割为像素块a和像素块b这两个像素块,在利用一个像素块进行距离测定时,与此并行地利用另一个像素块来进行污垢检测。受光阵列65所包含的多个像素66也可以分割为三个以上的像素块。在这种情况下,能够利用至少一个像素块来进行污垢检测,并利用另一个像素块来进行距离测定。
79.图10所示的窗口污垢检测处理在控制部210的控制下来执行。在步骤s100中,判定是否达到窗口污垢检测处理的处理定时。窗口污垢检测处理的处理定时例如也可以设为测距装置20的通常的测距动作中的每个规定期间。或者,也可以在预先规定的测距装置20的自诊断期间内设定窗口污垢检测处理的处理定时。
80.当达到窗口污垢检测处理的预先规定的处理定时时,进入步骤s200,判定部300从受光强度的直方图获取杂波峰值cl1的峰值水平h1。
81.在步骤s300中,判定部300判断预先规定的污垢判定条件是否成立。当污垢判定条件不成立时,回到步骤s100,待机直到下一个处理定时。另一方面,当污垢判定条件成立时,进入后述的步骤s400。
82.作为污垢判定条件,例如能够使用以下说明的各种污垢判定条件中的任意一个条件。
83.<污垢判定条件1>
84.当仅以下的第一条件c1成立时,判定为在窗口92存在污垢。
85.·
第一条件c1:“关于测距装置20的视野范围80内的至少一个像素,相当于从发光部40到窗口92的光路的距离的特定飞行时间tc下的受光强度h1为强度阈值it1以上”86.该污垢判定条件1为比后述的其他污垢判定条件宽松的条件,因此具有漏掉窗口92的污垢的可能性较低这样的优点。此外,优选无论直方图是否包含目标峰值tp1都判定第一条件c1的是否成立。若这样,则存在即使在直方图包含目标峰值tp1的情况下也能够检测窗口92的污垢这样的优点。
87.<污垢判定条件2>
88.当上述第一条件c1和下述第二条件c2a双方均成立时,判定为在窗口92存在污垢。
89.·
第二条件c2a:“在视野范围80内,特定飞行时间tc下的受光强度h1为强度阈值it1以上的像素的像素数为数量阈值以上,其中,该数量阈值为2以上的整数”90.对于该污垢判定条件2,在图7中,当在视野范围80内存在多个杂波峰值cl1的峰值水平h1为强度阈值it1以上的像素时,判定为在窗口92存在污垢,因此具有能够更可靠地判
定窗口92的污垢这样的优点。
91.<污垢判定条件3>
92.当上述第一条件c1和下述第二条件c2b两方均成立时,判定为在窗口92存在污垢。
93.·
第二条件c2b:“在视野范围80内,存在特定飞行时间tc下的受光强度h1为强度阈值it1以上的多个像素相互连续的像素集合体,并且像素集合体的像素数为预先规定的数量阈值以上”94.对于该污垢判定条件3,如图11所示,假定了由于窗口92的污垢,而特定飞行时间tc下的受光强度h1为强度阈值it1以上的多个像素在视野范围80内相互连续并构成像素集合体pa的情况。此外,“两个像素相互连续”这样的语句是指其中一个像素存在于另一个像素的上下左右的4个相邻位置中的任一位置。当窗口92存在污垢时,污垢附着于窗口92内的集中的区域的情况较多,因此如图11所示,特定飞行时间tc下的受光强度h1为强度阈值it1以上的多个像素一般在视野范围80内构成像素集合体pa。因此,在污垢判定条件3中,与上述的污垢判定条件2相比存在能够更可靠地判定窗口92的污垢这样的优点。
95.污垢判定条件是否成立的判定也可以遍及多个帧来实施。例如,在将n设为预先规定的2以上的整数时,也可以当污垢判定条件遍及连续的n个帧连续地成立时,判定为在窗口92有污垢。另外,在将n设为3以上的整数,并将m设为2以上且n以下的整数时,也可以当在连续的n个帧中的m个帧中污垢判定条件成立时,判定为在窗口92有污垢。或者,在将n设为预先规定的2以上的整数时,也可以使用遍及连续的n个帧的受光强度h1以及强度阈值it1各自的合计值或者平均值,来判定污垢判定条件是否成立。若采用这些方法,存在能够稳定地判定有无污垢,而能够防止误检测的优点。
96.当污垢判定条件成立时,进入步骤s400,执行窗口污垢的去除动作。根据来自判定部300的指示,由清洁部400执行窗口污垢的去除动作。具体而言,例如,通过清洗部410、411向窗口92的表面喷射水和空气中的至少一方,来去除窗口92的表面的污垢。另外,也可以当由温度传感器320测定出的外部空气温度表示在窗口92可能附着雪或者冰的温度时,加热器部420通过沿着窗口92设置的加热线对窗口92加热,使附着于窗口92的表面的雪、冰融化。
97.此外,也可以根据窗口92的污垢的位置来选择多个清洁方法中的一个方法并执行该方法。例如,也可以使用分别负责去除窗口92的多个不同的区域的污垢的多个清洗部410、411,根据存在污垢的区域,仅选择负责去除该区域的污垢的清洗部,并起动该清洗部。或者,也可以在窗口92的两个侧边中的一个侧边配置两个清洗部410、411双方,并将第一清洗部410设为流体排出速度较慢而污垢去除能力较低,将第二清洗部411设为流体排出速度较快而污垢去除能力较高。在这种情况下,可以在更靠近配置有两个清洗部的窗口92的侧边的区域存在污垢的情况下,使用污垢去除能力较低的第一清洗部410来执行污垢去除,在更靠近另一个侧边的区域存在污垢的情况下,使用第二清洗部411来执行污垢去除,因为它污垢去除能力较高。
98.另外,也可以根据污垢的程度来选择清洁方法并执行该方法。作为表示污垢的程度的污垢指标值,例如能够使用以下的任意一个指标值。
99.(1)污垢指标值d1
100.污垢指标值d1是受光强度h1与强度阈值it1的差。
101.(2)污垢指标值d2
102.污垢指标值d2是存在污垢的像素数。
103.(3)污垢指标值d3
104.污垢指标值d3是遍及视野范围80内的多个像素将受光强度h1与强度阈值it1的差相加所得的相加值。
105.这些污垢指标值d1~d3均为若其值越大则表示污垢的程度越高。判定部300也可以计算这些污垢指标值d1~d3中的任意一个,并将该污垢指标值通知给清洁部400。
106.清洁部400能够根据由污垢指标值表示的污垢的程度,来选择污垢去除能力不同的多个清洁方法中的一个方法并执行该方法。例如,也可以将污垢的程度预先划分为多个污垢阶段,在各污垢阶段中采用以下的三种清洁方法中的一个方法。
107.(1)清洁方法c1
108.执行仅使用空气的清洗部的清洁。
109.(2)清洁方法c2
110.执行使用空气和水双方的清洗部的清洁。
111.(3)清洁方法c3
112.执行使用清洗部和擦拭器部双方的清洁。
113.这三种清洁方法c1~c3的污垢去除能力依次逐渐变高,按照污垢的程度从低到高的顺序被选择并应用。
114.此外,也可以省略步骤s400。另外,当窗口92有污垢时,优选判定部300对搭载测距装置20的车辆的乘员通知在测距装置20的窗口92有污垢。例如,能够使用设置于客舱内的显示部、扬声器等通知部510来进行这样的通知。在通知污垢时,优选向外部通知窗口92中的存在污垢的位置。另外,运算部200也可以不将在窗口92中存在污垢的区域的距离数据输出到外部,而仅将不存在污垢的区域的距离数据输出到外部。
115.此外,在使用上述的<污垢判定条件2>或<污垢判定条件3>的情况下,也可以当特定飞行时间tc下的受光强度h1为强度阈值it1以上的像素的像素数为第一数量阈值以上时,(a)当该像素数为第二数量阈值以上时,不使清洁部400执行去除动作而仅进行通知,其中,上述第二数量阈值大于第一数量阈值,(b)当该像素数不足第二数量阈值时,使清洁部400执行去除动作。由此,能够判定是否是通过清洁部400不能去除的大小的污垢。
116.另外,在窗口92未被污染的情况下,判定部300也可以通过计算与受光强度h1相应的新的阈值设定值并保存于存储部310,来更新阈值设定值。在这种情况下,也可以驱动清洁部400来执行去除动作,并使用在去除动作后得到的受光强度h1来计算新的阈值设定值。例如,使用原来的受光强度h0和受光强度h1来计算新的阈值设定值。根据该方法,能够应对发光的经年老化、窗口92的变形等,并能够防止漏掉污垢。
117.另外,在通常的车辆行驶中,在一次也未判定为污垢而结束行驶时,也可以通过计算与在此期间得到的受光强度h1相应的新的阈值设定值并保存于存储部310,来更新阈值设定值。根据该方法,能够应对发光的经年老化、窗口92的变形等,并能够防止漏掉污垢。
118.如以上那样,根据本实施方式,在对特定飞行时间tc下的受光强度h1预先规定的污垢检测条件成立时,判定为在窗口92上存在污垢,因此能够根据受光强度来检测在窗口是否有污垢。
119.本公开所记载的控制部及其方法也可以通过专用计算机实现,该专用计算机通过构成被编程为执行利用计算机程序具体化的一个或多个功能的处理器以及存储器来提供。或者,本公开所记载的控制部及其方法也可以通过专用计算机来实现,该专用计算机通过利用一个以上的专用硬件逻辑电路构成处理器来提供。或者,本公开所记载的控制部及其方法也可以通过由被编程为执行一个或多个功能的处理器和存储器以及由一个以上的硬件逻辑电路构成的处理器组合构成的一个以上的专用计算机来实现。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读取的非过渡有形记录介质。
120.本公开并不限于上述的实施方式、其变形例,能够在不脱离其主旨的范围内在各种方式中实施。另外,上述的各种特征性结构只要不相互矛盾就能够任意地组合并采用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1