角速度传感器及角速度传感器系统的制作方法
角速度传感器及角速度传感器系统
1.相关申请的交叉引用
2.本技术是基于2019年10月29日提交的日本专利申请第2019-196694号的申请,在此通过参照来整合其记载内容。
技术领域
3.本公开涉及检测角速度的角速度传感器及角速度传感器系统。
背景技术:
4.以往,例如,在专利文献1中提出了一种角速度传感器,该角速度传感器在使质量部沿着驱动轴方向驱动振动的状态下检测角速度。具体而言,在这种角速度传感器中,如果在沿着驱动轴方向驱动振动的状态下施加角速度,则质量部通过科氏力而沿与驱动轴正交的检测轴方向进行振动。因此,基于沿着检测轴方向的振动检测角速度。
5.另外,在该角速度传感器中,能够切换驱动轴方向和检测轴方向。而且,在该角速度传感器中,在切换驱动轴方向和检测轴方向的同时,获取沿着驱动轴方向的谐振频率和沿着检测轴方向的谐振频率,并基于这些谐振频率之差修正灵敏度。由此,在该角度传感器中,抑制了检测精度因温度变化或冲击等外部干扰而降低。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2017-187445号公报
技术实现要素:
9.但是,上述角速度传感器需要切换驱动轴方向,每当切换驱动轴方向时都会构成不能进行角速度检测的期间。即,在上述角速度传感器中,每隔规定期间都会构成不能检测角速度的期间,检测精度容易降低。
10.另外,上述角速度传感器在沿着驱动轴方向进行驱动振动时,即使沿着检测轴方向的谐振频率发生变化也不能应对,不能充分抑制检测精度降低。并且,由于角速度传感器的灵敏度依赖于沿着驱动轴方向的谐振频率,因此,如果基于沿着驱动轴方向的谐振频率和沿着检测轴方向的谐振频率之差修正灵敏度,则不能充分抑制谐振频率的绝对值的变动所引起的灵敏度变动,检测精度会降低。
11.本公开的目的在于提供能够充分抑制检测精度因温度变化或冲击等外部干扰而降低的角速度传感器及角速度传感器系统。
12.根据本公开的一种观点,角速度传感器系统具备角速度传感器和控制部,所述角速度传感器具有:可动部,其具有驱动弹簧及检测弹簧、质量部、可动部用驱动电极和可动部用检测电极,所述质量部被经由驱动弹簧及检测弹簧支承,能够通过驱动弹簧的变形而沿第一方向进行振动,并且,如果在沿第一方向振动时被施加了角速度,则能够通过科氏力所引起的检测弹簧的变形而沿与第一方向正交的第二方向进行振动;固定部用驱动电极,
其与可动部用驱动电极对置地配置;以及固定部用检测电极,其与可动部用检测电极对置地配置;所述控制部进行规定的处理。而且,角速度传感器在可动部具备可动部用检测激励电极,所述角速度传感器具有:固定部用检测激励电极,其与可动部用检测激励电极对置;驱动弹簧调整部,其使驱动弹簧的弹簧常数变化;以及检测弹簧调整部,其使检测弹簧的弹簧常数变化。控制部构成为:通过对固定部用驱动电极施加规定的电压而使可动部沿第一方向振动,同时通过对固定部用检测激励电极施加规定的电压而使可动部也沿第二方向振动,获取可动部在沿着第一方向的方向上的第一谐振频率以及可动部在沿着第二方向的方向上的第二谐振频率,控制驱动弹簧调整部来调整驱动弹簧的弹簧常数以将第一谐振频率维持在一定的值,并且控制检测弹簧调整部来调整检测弹簧的弹簧常数以将第二谐振频率维持在一定的值,基于以第一谐振频率对来自固定部用检测电极的信号进行了同步检波而得的结果来检测角速度。
13.据此,控制部使可动部沿第一方向及第二方向振动,同时将第一谐振频率维持在一定的值,并且将第二谐振频率维持在一定的值。因此,能够降低温度变化或冲击等外部干扰的影响,能够抑制检测精度降低。
14.另外,控制部使可动部沿第一方向及第二方向振动,同时将第一谐振频率维持在一定的值,并且将第二谐振频率维持在一定的值,无需切换第一方向和第二方向。因此,无需使可动部间歇振动,不会构成不能检测角速度的期间。因此,能够进一步抑制检测精度降低。
15.根据本公开的另一观点,角速度传感器具备:可动部,其具有驱动弹簧及检测弹簧、质量部、可动部用驱动电极和可动部用检测电极,所述质量部被经由驱动弹簧及检测弹簧支承,能够通过驱动弹簧的变形而沿第一方向进行振动,并且,如果在沿第一方向振动时被施加了角速度,则能够通过科氏力所引起的检测弹簧的变形而沿与第一方向正交的第二方向进行振动;固定部用驱动电极,其与可动部用驱动电极对置地配置;以及固定部用检测电极,其与可动部用检测电极对置地配置。在可动部具备可动部用检测激励电极,具有:固定部用检测激励电极,其与可动部用检测激励电极对置;驱动弹簧调整部,其使驱动弹簧的弹簧常数变化;以及检测弹簧调整部,其使检测弹簧的弹簧常数变化。而且,角速度传感器通过对固定部用驱动电极施加规定的电压而使可动部沿第一方向振动,同时通过对固定部用检测激励电极施加规定的电压而使可动部也沿第二方向振动,控制驱动弹簧调整部来调整驱动弹簧的弹簧常数以将可动部在沿着第一方向的方向上的第一谐振频率维持在一定的值,控制检测弹簧调整部来调整检测弹簧的弹簧常数以将可动部在沿着第二方向的方向上的第二谐振频率维持在一定的值,基于来自固定部用检测电极的信号来检测角速度。
16.据此,可动部被设为沿第一方向及第二方向振动的状态,同时维持第一谐振频率,并且维持第二谐振频率。因此,能够降低温度变化或冲击等外部干扰的影响,能够抑制检测精度降低。
17.另外,可动部被设为沿第一方向及第二方向振动的状态,同时维持第一谐振频率,并且维持第二谐振频率,因此,无需切换第一方向和第二方向。因此,无需使可动部间歇振动,不会构成不能检测角速度的期间。因此,能够进一步抑制检测精度降低。
18.此外,对各构成要素等标注的带括号的参考标记表示该构成要素等和后述的实施方式所记载的具体构成要素等的对应关系的一例。
附图说明
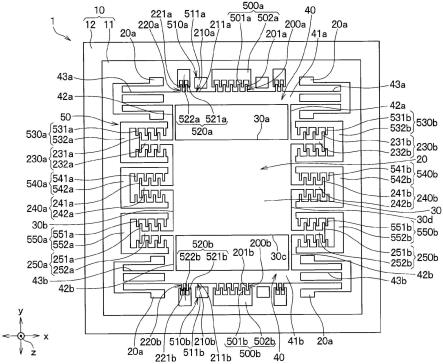
19.图1是表示第一实施方式的角速度传感器的俯视图。
20.图2是表示频率和可动部的驱动特性及检测特性的关系的图。
21.图3是表示具有图1所示的角速度传感器的角速度传感器系统的框图。
22.图4是表示第二实施方式的角速度传感器的俯视图。
23.图5是表示第三实施方式的角速度传感器的俯视图。
24.图6a是表示检测模式中的质量部的状态的示意图。
25.图6b是表示非检测模式中的质量部的状态的示意图。
26.图7是表示频率和可动部的驱动特性及检测特性的关系的图。
27.图8是表示第三实施方式的角速度传感器系统的框图。
28.图9是表示第四实施方式的角速度传感器系统的框图。
29.图10是表示第五实施方式的角速度传感器系统的框图。
30.图11是表示第六实施方式的角速度传感器的俯视图。
31.图12是表示第六实施方式的角速度传感器系统的框图。
32.图13是表示第七实施方式的角速度传感器系统的框图。
33.图14a是表示其它实施方式的可动部用驱动调整电极及固定部用驱动调整电极的结构的俯视图。
34.图14b是表示其它实施方式的可动部用驱动调整电极及固定部用驱动调整电极的结构的俯视图。
35.图14c是表示其它实施方式的可动部用驱动调整电极及固定部用驱动调整电极的结构的俯视图。
具体实施方式
36.以下,基于附图对本公开的实施方式进行说明。此外,对于以下各实施方式相互间彼此相同或等同的部分,标注相同的附图标记进行说明。
37.《第一实施方式》
38.参照附图对第一实施方式进行说明。此外,本实施方式的角速度传感器1例如搭载于车辆上,优选用于检测围绕车辆的与上下方向平行的轴的角速度。
39.如图1所示,角速度传感器1形成于板状的基板10的一面侧。在本实施方式中,基板10是使用将支承基板11、未图示的嵌入式绝缘膜、半导体层12依次层叠的soi(silicon on insulator(绝缘体上硅)的简称)基板而构成的。而且,角速度传感器1中的构成传感器结构体的各图案为通过部分地去除嵌入式绝缘膜而脱离的状态。
40.此外,以下,以半导体层12的面方向上的一个方向为x轴方向、以与x轴方向正交的方向为y轴方向、以与x轴方向及y轴方向正交的方向为z轴方向进行说明。在图1中,将纸面左右方向设为x轴方向,将纸面上下方向设为y轴方向,将纸面垂直方向设为z轴方向。
41.角速度传感器1为具有可动部20及固定部50等的结构。可动部20为在后述的除锚定部20a以外的部分去除位于背面侧的嵌入式绝缘膜而从支承基板11脱离的状态。固定部50为在背面侧的至少一部分残留有嵌入式绝缘膜,且该至少一部分不是从支承基板11脱离而是固定于支承基板11的状态。而且,虽未特别图示,但可动部20及固定部50分别在规定部
位形成有焊盘,经由该焊盘与后述的控制部600电连接。
42.以下,对可动部20及固定部50的结构进行具体说明。可动部20为具有质量部30、梁部40、各种电极部200a、200b、210a、210b、220a、220b、230a、230b、240a、240b、250a、250b的结构。
43.质量部30为根据被施加的角速度进行位移的部分,经由梁部40支承于锚定部20a。在本实施方式中,质量部30为具有沿着x轴方向的一对一边30a、30c及沿着y轴方向的一对一边30b、30d的大致矩形的俯视形状。
44.梁部40为支承质量部30并且在进行角速度检测时能够使质量部30沿x轴方向及y轴方向位移的结构。在本实施方式中,梁部40为具有板41a、41b、检测弹簧42a、42b、驱动弹簧43a、43b的结构。
45.板41a、41b为y轴方向的长度比质量部30短的矩形的俯视形状,以隔着质量部30且与各一边30a、30c对置的方式配置。即,各板41a、41b隔着质量部30配置。
46.检测弹簧42a、42b以将质量部30和各板41a、41b连结的方式配置。在本实施方式中,检测弹簧42a、42b以将质量部30的沿着x轴方向的一边30a、30c的两端部和各板41a、41b连接的方式设置。此外,本实施方式的检测弹簧42a、42b为直梁结构。
47.驱动弹簧43a、43b以将各板41a、41b的沿着y轴方向的各一边和锚定部20a连结的方式配置。即,各个板41a、41b被两个驱动弹簧43a、43b支承于锚定部20a。由此,质量部30成为经由驱动弹簧43a、43b、板41a、41b、检测弹簧42a、42b支承于锚定部20a的状态。此外,本实施方式的驱动弹簧43a、43b为比检测弹簧42a、42b更容易线性挠曲的结构,且为折叠梁结构。
48.各种电极部200a、200b、210a、210b、220a、220b、230a、230b、240a、240b、250a、250b被作为可动部用驱动电极部200a、200b、可动部用驱动调整电极部210a、210b、可动部用驱动监测电极部220a、220b、可动部用检测电极部230a、230b、可动部用检测调整电极部240a、240b、可动部用检测激励电极部250a、250b。
49.可动部用驱动电极部200a、200b、可动部用驱动调整电极部210a、210b及可动部用驱动监测电极部220a、220b设置于各板41a、41b上。
50.具体而言,可动部用驱动电极部200a、200b为在各板41a、41b的x轴方向的大致中央部具有向与质量部30侧相反的一侧呈梳齿状突出的可动部用驱动电极201a、201b的结构。
51.可动部用驱动调整电极部210a、210b以隔着可动部用驱动电极部200a、200b的方式各设置有两个。而且,可动部用驱动调整电极部210a、210b将其与后述的固定部用驱动调整电极511a、511b对置的部分构成为可动部用驱动调整电极211a、211b。
52.可动部用驱动监测电极部220a、220b以隔着可动部用驱动电极201a、201b及可动部用驱动调整电极211a、211b的方式各设置有两个。而且,可动部用驱动监测电极部220a、220b为具有向与质量部30侧相反的一侧呈梳齿状突出的可动部用驱动监测电极221a、221b的结构。
53.在质量部30中的沿着y轴方向的各一边30b、30d分别具备可动部用检测电极部230a、230b、可动部用检测调整电极部240a、240b、可动部用检测激励电极部250a、250b。即,可动部用检测电极部230a、230b、可动部用检测调整电极部240a、240b、可动部用检测激励
电极部250a、250b以分别位于隔着质量部30的两侧的方式形成。
54.可动部用检测电极部230a、230b为具有可动部用检测电极231a、231b和支承该可动部用检测电极231a、231b的支承部232a、232b的结构。支承部232a、232b以从质量部30沿着x轴方向突出的方式形成。而且,可动部用检测电极231a、231b以从支承部232a、232b沿着y轴方向延伸出的方式设置于支承部232a、232b。
55.可动部用检测调整电极部240a、240b为具有可动部用检测调整电极241a、241b和支承该可动部用检测调整电极241a、241b的支承部242a、242b的结构。支承部242a、242b以从质量部30沿着x轴方向突出的方式形成。而且,可动部用检测调整电极241a、241b以从支承部242a、242b沿着y轴方向延伸出的方式设置于支承部242a、242b。
56.可动部用检测激励电极部250a、250b为具有可动部用检测激励电极251a、251b和支承该可动部用检测激励电极251a、251b的支承部252a、252b的结构。支承部252a、252b以从质量部30沿着x轴方向突出的方式形成。而且,可动部用检测激励电极251a、251b以从支承部252a、252b沿着y轴方向延伸出的方式设置于支承部252a、252b。
57.此外,可动部用检测电极231a、231b、可动部用检测调整电极241a、241b、可动部用检测激励电极251a、251b分别向各支承部232a、232b、242a、242b、252a、252b的两侧延伸出。
58.以上为本实施方式的可动部20的结构。而且,本实施方式的可动部20在进行角速度的检测时,沿着y轴方向进行自激谐振,并且沿着x轴方向进行自激谐振,具体见后述。在本实施方式中,也将可动部20沿着y轴方向进行自激谐振称为驱动谐振,也将可动部20沿着x轴方向进行自激谐振称为检测谐振。而且,在本实施方式中,y轴方向为驱动轴方向,相当于第一方向。同样,x轴方向为检测轴方向,相当于第二方向。
59.另外,如图2所示,以下,将可动部20进行驱动谐振时在沿着y轴方向的方向上的谐振频率设为驱动谐振频率fd,将可动部20进行检测谐振时在沿着x轴方向的方向上的谐振频率设为检测谐振频率fs。此外,在图2中,将与可动部20的沿着y轴方向的振动相关的频率和振幅的关系表示为驱动特性,将与可动部20的沿着x轴方向的振动相关的频率和振幅的关系表示为检测特性。而且,在本实施方式中,驱动谐振频率fd相当于第一谐振频率,检测谐振频率fs相当于第二谐振频率。并且,在本实施方式中,驱动谐振频率fd和检测谐振频率fs为不同的值。
60.如图1所示,固定部50具有固定部用驱动电极部500a、500b、固定部用驱动调整电极部510a、510b、固定部用驱动监测电极部520a、520b、固定部用检测电极部530a、530b、固定部用检测调整电极部540a、540b、固定部用检测激励电极部550a、550b。
61.固定部用驱动电极部500a、500b为具有以与可动部用驱动电极201a、201b的梳齿啮合的方式沿y轴方向延伸出的梳齿状的固定部用驱动电极501a、501b和支承固定部用驱动电极501a、501b的支承部502a、502b的结构。
62.固定部用驱动调整电极部510a、510b以与板41a、41b对置的方式配置。在本实施方式中,固定部用驱动调整电极部510a、510b为具有大致矩形的俯视形状的固定部用驱动调整电极511a、511b的结构。而且,固定部用驱动调整电极部510a、510b分别在与板41a、41b分离规定间隔的位置处以隔着固定部用驱动电极部500a、500b的方式各配置有两个。此外,如上所述,板41a、41b中的与固定部用驱动调整电极511a、511b对置的部分成为可动部用驱动调整电极211a、211b。
63.固定部用驱动监测电极部520a、520b为具有以与可动部用驱动监测电极221a、221b的梳齿啮合的方式沿y轴方向延伸出的固定部用驱动监测电极521a、521b和支承固定部用驱动监测电极521a、521b的支承部522a、522b的结构。
64.固定部用检测电极部530a为具有以与可动部用检测电极231a、231b的梳齿啮合的方式沿y轴方向延伸出的固定部用检测电极531a、531b和支承固定部用检测电极531a、531b的支承部532a、532b的结构。
65.固定部用检测调整电极部540a、540b为具有以与可动部用检测调整电极241a、241b的梳齿啮合的方式沿y轴方向延伸出的固定部用检测调整电极541a、541b和支承固定部用检测调整电极541a、541b的支承部542a、542b的结构。
66.固定部用检测激励电极部550a、550b为具有以与可动部用检测激励电极251a、251b的梳齿啮合的方式沿y轴方向延伸出的固定部用检测激励电极551a、551b和支承固定部用检测激励电极551a、551b的支承部552a、552b的结构。
67.此外,可动部用检测调整电极241a、241b和固定部用检测调整电极541a、541b以相邻的各电极241a、241b、541a、541b的间隔相等的方式形成。即,可动部用检测调整电极241a、241b形成于沿着x轴方向相邻的固定部用检测调整电极541a、541b的中心。
68.另一方面,可动部用检测电极231a、231b和固定部用检测电极531a、531b以相邻的各电极231a、231b、531a、531b的间隔不同的方式形成。在本实施方式中,就可动部用检测电极231a、231b和固定部用检测电极531a、531b而言,沿着x轴方向相邻的固定部用检测电极531a、531b和配置于该固定部用检测电极531a、531b间的可动部用检测电极231a、231b的间隔如下。即,可动部用检测电极231a、231b和固定部用检测电极531a、531b以质量部30侧的固定部用检测电极531a、531b和可动部用检测电极231a、231b的间隔大于与质量部30侧相反的一侧的固定部用检测电极531a、531b和可动部用检测电极231a、231b的间隔的方式形成。
69.同样,可动部用检测激励电极251a、251b和固定部用检测激励电极551a、551b以相邻的各电极251a、251b、551a、551b的间隔不同的方式形成。在本实施方式中,就可动部用检测激励电极251a、251b和固定部用检测激励电极551a、551b而言,沿着x轴方向相邻的固定部用检测激励电极551a、551b和配置于该固定部用检测激励电极551a、551b间的可动部用检测激励电极251a、251b的间隔如下。即,可动部用检测激励电极251a、251b和固定部用检测激励电极551a、551b以质量部30侧的固定部用检测激励电极551a、551b和可动部用检测激励电极251a、251b的间隔大于与质量部30侧相反的一侧的固定部用检测激励电极551a、551b和可动部用检测激励电极251a、251b的间隔的方式形成。
70.以上为本实施方式的角速度传感器1的结构。此外,在本实施方式中,可动部用驱动调整电极211a、211b及固定部用驱动调整电极511a、511b相当于驱动弹簧调整部。可动部用检测调整电极241a、241b及固定部用检测调整电极541a、541b相当于检测弹簧调整部。接着,参照图3对使用上述角速度传感器1的角速度传感器系统进行说明。此外,图3中的fd、fs表示频率。
71.角速度传感器系统为具备上述角速度传感器1和具有各种电路的控制部600的结构。此外,在角速度传感器系统搭载于车辆的情况下,控制部600由车辆ecu(electronic control unit(电子控制单元)的简称)等构成。另外,虽未特别图示,但可动部20例如与控
制部600的地线连接而维持在接地电位。
72.控制部600具备第一电压输入电路610、第一取出电路620、第一相位同步电路(以下也简称为第一pll(phase-locked loop(锁相环)的简称)电路)630、第一频率控制器640、第一同步检波电路650、振幅控制器660、第一积分器670等。另外,控制部600具备第二电压输入电路680、第二取出电路690、第二同步检波电路700、第二相位同步电路(以下也称为第二pll电路)710、第二频率控制器720、第二积分器730等。
73.第一电压输入电路610为具有偏压施加电路、反相电路、非反相电路等的结构,与各固定部用驱动电极501a、501b连接。第一电压输入电路610对被输入的信号施加规定的偏压,并且生成将相位反转180
°
的信号和非反转的信号两种信号。而且,第一电压输入电路610向各固定部用驱动电极501a、501b中的一方输入反相信号,向另一方输入非反相信号。此外,如后所述,第一电压输入电路610将频率为fd的交流电压输入固定部用驱动电极501a、501b。另外,如后所述,可动部20被控制以将驱动谐振频率维持在fd。因此,可动部20沿着y轴方向进行驱动谐振。
74.第一取出电路620为具有c-v转换电路、差动放大电路等的结构,与各固定部用驱动监测电极521a、521b连接。而且,第一取出电路620获取从各固定部用驱动监测电极521a、521b输出的信号并对其进行差动放大,并且输出转换成电压的信号。
75.第一pll电路630与第一取出电路620连接,并以从第一取出电路620输入的信号的频率为fd的方式进行输出。在该情况下,第一pll电路630控制频率,以使被输入的信号和所输出的信号的相位差成为谐振时的相位差(例如90
°
)。
76.第一频率控制器640与第一pll电路630及固定部用驱动调整电极511a、511b连接,例如为具备频率计数器等的结构,将从第一pll电路630输出的信号的频率数值化。而且,第一频率控制器640对固定部用驱动调整电极511a、511b施加直流电压以使经数值化的频率成为希望的驱动谐振频率(即图3中的设定点1)。由此,产生与可动部20(即可动部用驱动调整电极211a、211b)和以隔着可动部20的方式配置的固定部用驱动调整电极511a、511b之间的电位差相应的电弹簧效应。而且,在角速度传感器1中,通过电弹簧效应调整驱动弹簧43a、43b的弹簧常数,将可动部20的驱动谐振频率维持在希望的fd。即,即使对角速度传感器1施加了温度变化或冲击等外部干扰,可动部20的驱动谐振频率也维持在希望的fd。
77.第一同步检波电路650与第一取出电路620及第一pll电路630连接,以从第一pll电路630输出的信号为参考信号对从第一取出电路620输出的信号进行同步检波。而且,第一同步检波电路650将与参考信号相同的频率成分的振幅量输出到振幅控制器660,并且向第一积分器670输出频率为fd的信号。
78.振幅控制器660与第一同步检波电路650连接,如果从第一同步检波电路650向振幅控制器660输入了振幅量,则振幅控制器660以使该振幅量成为希望的驱动谐振的振幅量(即图3中的设定点2)的方式调整施加于固定部用驱动电极501a、501b的交流电压的电压值并将其输出到第一积分器670。由此,经由第一积分器670及第一电压输入电路610向固定部用驱动电极501a、501b输入具有经过控制的电压值的频率fd的交流电压。因此,可动部20沿着y轴方向以一定的振幅进行驱动谐振。
79.第二电压输入电路680为具有偏压施加电路、反相电路、非反相电路等的结构,与各固定部用检测激励电极551a、551b连接。第二电压输入电路680对被输入的信号施加规定
的偏压,并且生成将相位反转的信号和非反转的信号两种信号。而且,第二电压输入电路680向各固定部用检测激励电极551a、551b中的一方输入反相信号,向另一方输入非反相信号。此外,如后所述,第二电压输入电路680将频率为fs的交流电压输入固定部用检测激励电极551a、551b。另外,如后所述,可动部20被控制以将检测谐振频率维持在fs。因此,可动部20沿着x轴方向进行检测谐振。
80.第二取出电路690为具有c-v转换电路、差动放大电路等的结构,与各固定部用检测电极531a、531b连接。而且,第二取出电路690获取从各固定部用检测电极531a、531b输出的信号并对其进行差动放大,并且输出转换成电压的信号。
81.此外,从固定部用检测电极531a、531b输出的信号为将因检测谐振而产生的信号和因通过施加角速度而产生的科氏力的振动而产生的信号叠加所得的信号。
82.第二同步检波电路700与第二取出电路690及第一pll电路630连接,以从第一pll电路630输出的信号(即具有驱动谐振频率fd的信号)为参考信号对从第二取出电路690输出的信号进行同步检波。另外,本实施方式的第二同步检波电路700具备低通滤波器(以下也简称为lpf),通过lpf去除同步检波后的信号的交流成分,输出直流成分。即,第二同步检波电路700通过lpf降低检测谐振的影响,并且输出与参考信号相同的频率成分的振幅量。由此,基于以驱动谐振频率fd进行同步检波的结果来检测角速度。此外,在本实施方式的lpf中,去除驱动谐振频率fd和检测谐振频率fs之差的绝对值(即|fs-fd|)以上的频率。
83.即,如果将因检测谐振而产生的信号设为s
·
sinωst,将因科氏力引起的振动而产生的信号设为c(ω)
·
cosωd,将参考信号设为cosωdt且ωd=2πfd、ωs=2πfs,则用下式表示由第二同步检波电路700同步检波后的信号。
84.[式1]
[0085][0086]
因此,通过利用lpf去除|fs-fd|以上的频率,可以适宜检测因科氏力而产生的振动的振幅(即角速度)。
[0087]
第二pll电路710与第二取出电路690连接,并以从第二取出电路690输入的信号的频率为fs的方式进行输出。在该情况下,第二pll电路710控制频率,以使被输入的信号和所输出的信号的相位差成为谐振时的相位差(例如90
°
)。
[0088]
第二频率控制器720与第二pll电路710及固定部用检测调整电极541a、541b连接,例如为具备频率计数器等的结构,将从第二pll电路710输出的信号的频率数值化。而且,第二频率控制器720对固定部用检测调整电极541a、541b施加直流电压以使经数值化的频率成为希望的检测谐振频率(即图中的设定点3)。由此,在可动部20(即可动部用检测调整电极241a、241b)和以隔着可动部20的方式配置的固定部用检测调整电极541a、541b之间产生电弹簧效应。而且,在角速度传感器1中,通过电弹簧效应调整检测弹簧42a、42b的弹簧常数,将可动部20的检测谐振频率维持在希望的fs。即,即使对角速度传感器1施加了温度变化或冲击等外部干扰,可动部20的检测谐振频率也维持在希望的fs。
[0089]
在第二积分器730中,施加规定的电压值(即图3中的振幅)。而且,经由第二积分器730及第二电压输入电路680向固定部用检测激励电极551a、551b输入具有规定的电压值的
频率fs的交流电压。因此,可动部20沿着x轴方向进行检测谐振。
[0090]
在此,在本实施方式中,控制部600在使可动部20进行驱动谐振及检测谐振时,使检测谐振的振幅小于驱动谐振的振幅。例如,控制部600通过调整从第一电压输入电路610输入到固定部用驱动电极501a、501b的交流电压的振幅、由第一电压输入电路610施加的偏压值,来使检测谐振的振幅小于驱动谐振的振幅。
[0091]
以上为本实施方式的角速度传感器系统的结构。接着,对使用上述角速度传感器系统的角速度检测动作进行简单说明。
[0092]
本实施方式的角速度传感器系统如上述那样构成。因此,角速度传感器1通过对固定部用驱动电极501a、501b施加具有被控制的电压值及频率fd的交流电压而使可动部20沿着y轴方向进行振动。此时,在角速度传感器1中,通过基于来自固定部用驱动监测电极521a、521b的信号对固定部用驱动调整电极511a、511b施加直流电压而控制电弹簧效应来维持驱动谐振频率fd。因此,角速度传感器1成为可动部20沿着y轴方向始终以一定的希望的振幅且以一定的希望的谐振频率进行驱动谐振的状态。
[0093]
另外,角速度传感器1通过对固定部用检测激励电极551a、551b施加具有规定的振幅及频率fs的交流电压而使可动部20沿着x轴方向进行振动。此时,在角速度传感器1中,通过基于来自固定部用检测电极531a、531b的信号对固定部用检测调整电极541a、541b施加直流电压而控制电弹簧效应来维持检测谐振频率fs。因此,角速度传感器1成为可动部20沿着x轴方向始终以一定的希望的谐振频率进行检测谐振的状态。即,在本实施方式的角速度传感器系统中,可动部20成为维持驱动谐振频率fd并维持检测谐振频率fs、且始终沿y轴方向进行驱动谐振并沿x轴方向进行检测谐振的状态。
[0094]
如果角速度传感器1在该状态下被施加绕z轴的角速度,则可动部20根据科氏力而沿x轴方向进行振动。而且,控制部600以驱动谐振频率fd对基于固定部用检测电极531a、531b的信号进行同步检波,并从经过同步检波的信号中去除|fs-fd|以上的频率而检测角速度。
[0095]
如以上所说明,在本实施方式中,可动部20成为维持驱动谐振频率fd并维持检测谐振频率fs、且始终沿y轴方向进行驱动谐振并沿x轴方向进行检测谐振的状态。即,即使对角速度传感器1施加了温度变化或冲击等外部干扰,可动部20仍为沿y轴方向进行驱动谐振并且沿x轴方向进行检测谐振的状态。因此,在本实施方式的角速度传感器系统中,能够降低温度变化或冲击等外部干扰的影响,能够抑制检测精度降低。
[0096]
另外,可动部20成为始终沿y轴方向进行驱动谐振并且沿x轴方向进行检测谐振的状态。即,无需使可动部20间歇振动,不会构成不能检测角速度的期间。因此,能够进一步抑制检测精度降低,还能够抑制通用性降低。
[0097]
而且,在本实施方式中,控制部600在使可动部20进行驱动谐振及检测谐振时,使检测谐振的振幅小于驱动谐振的振幅。因此,与检测谐振的振幅为驱动谐振的振幅以上的情况相比,能够降低检测谐振对驱动谐振带来的影响,能够降低角速度的检测精度降低。
[0098]
即,在本实施方式中,可动部20成为始终沿y轴方向进行驱动谐振并且沿x轴方向进行检测谐振的状态,因此,在施加了绕z轴的角速度时,还可以沿y轴方向产生科氏力。在该情况下,如果检测谐振的振幅大,则因向y轴方向的科氏力而产生的振动变大。因此,通过使检测谐振的振幅小于驱动谐振的振幅,能够减小向y轴方向的科氏力,能够抑制角速度的
检测精度降低。但是,因为驱动谐振的振幅越大则与角速度检测相关的灵敏度越大,所以优选增大驱动谐振的振幅。
[0099]
并且,在本实施方式中,检测弹簧42a、42b为直梁结构,是容易产生硬弹簧效应的结构。在该情况下,通过如上述那样减小检测谐振的振幅,还能够抑制硬弹簧效应。此外,在本实施方式中,因为将可动部用检测电极231a、231b及固定部用检测电极531a、531b形成为梳齿状,所以即使减小检测谐振的振幅,也能够抑制因确保对置面积而灵敏度降低。
[0100]
《第一实施方式的变形例》
[0101]
对第一实施方式的变形例进行说明。首先,在上述第一实施方式中,对向固定部用驱动调整电极511a、511b施加电压而通过电弹簧效应调整驱动谐振频率fd、并且向固定部用检测调整电极541a、541b施加电压而通过电弹簧效应调整驱动检测频率fs的例子进行了说明。在此,电弹簧效应只能减小弹簧常数,只能减小谐振频率。
[0102]
因此,变形例是在第一实施方式的角速度传感器系统中对固定部用驱动调整电极511a、511b施加偏置电压,将希望的驱动谐振频率fd设定为小于以梁尺寸等规定的设计值。同样,对固定部用检测调整电极541a、541b施加偏置电压,将希望的检测谐振频率fs设定为小于以梁尺寸等规定的设计值。由此,还能够通过减小施加于固定部用驱动调整电极511a、511b的电压而增大弹簧常数。因此,还能够应对因施加温度变化或冲击等外部干扰而谐振频率增大的情况,能够进一步抑制检测精度降低。
[0103]
《第二实施方式》
[0104]
对第二实施方式进行说明。相对于第一实施方式,第二实施方式变更了可动部用检测电极231a、231b、可动部用检测激励电极251a、251b、固定部用检测电极531a、531b及固定部用检测激励电极551a、551b的配置关系。关于其它,因为与第一实施方式相同,所以在此省略说明。
[0105]
就本实施方式的角速度传感器1而言,如图4所示,可动部用检测电极231a、231b分别设置在质量部30的沿着y轴方向的一对一边30b、30d中的一方的一边30b。另外,可动部用检测激励电极251a、251b分别设置在质量部30的沿着y轴方向的一对一边30b、30d中的另一方的一边30d。即,可动部用检测电极231a、231b和可动部用检测激励电极251a、251b隔着质量部30配置。
[0106]
此外,在本实施方式中,可动部用检测电极231a、231b以隔着形成于质量部30的一边30b的可动部用检测调整电极241a的方式配置。可动部用检测激励电极251a、251b以隔着形成于质量部30的一边30d的可动部用检测调整电极241b的方式配置。
[0107]
而且,固定部用检测电极531a、531b以与可动部用检测电极231a、231b的梳齿啮合的方式配置。固定部用检测激励电极551a、551b以与可动部用检测激励电极251a、251b的梳齿啮合的方式配置。即,固定部用检测电极531a、531b和固定部用检测激励电极551a、551b隔着质量部30配置。
[0108]
即,可动部用检测电极231a、231b及固定部用检测电极531a、531b以质量部30为基准分别配置于一侧。可动部用检测激励电极251a、251b及固定部用检测激励电极551a、551b以质量部30为基准分别配置于另一侧。
[0109]
另外,就可动部用检测电极231a、231b和固定部用检测电极531a、531b而言,沿着x轴方向相邻的固定部用检测电极531a、531b和配置于该固定部用检测电极531a、531b间的
可动部用检测电极231a、231b的间隔如下。
[0110]
即,可动部用检测电极231a和固定部用检测电极531a以质量部30侧的固定部用检测电极531a和可动部用检测电极231a的间隔大于与质量部30侧相反的一侧的固定部用检测电极531a和可动部用检测电极231a的间隔的方式形成。
[0111]
另一方面,可动部用检测电极231b和固定部用检测电极531b以质量部30侧的固定部用检测电极531b和可动部用检测电极231b的间隔小于与质量部30侧相反的一侧的固定部用检测电极531b和可动部用检测电极231b的间隔的方式形成。即,在本实施方式中,可动部用检测电极231a及固定部用检测电极531a和可动部用检测电极231b及固定部用检测电极531b以间隔大的区域和间隔小的区域相反的方式形成。
[0112]
同样,就可动部用检测激励电极251a、251b和固定部用检测激励电极551a、551b而言,沿着x轴方向相邻的固定部用检测激励电极551a、551b和配置于该固定部用检测激励电极551a、551b间的可动部用检测激励电极251a、251b的间隔如下。
[0113]
即,可动部用检测激励电极251a和固定部用检测激励电极551a以质量部30侧的固定部用检测激励电极551a和可动部用检测激励电极251a的间隔大于与质量部30侧相反的一侧的固定部用检测激励电极551a和可动部用检测激励电极251a的间隔的方式形成。
[0114]
另一方面,可动部用检测激励电极251b和固定部用检测激励电极551b以质量部30侧的固定部用检测激励电极551b和可动部用检测激励电极251b的间隔小于与质量部30侧相反的一侧的固定部用检测激励电极551b和可动部用检测激励电极251b的间隔的方式形成。即,在本实施方式中,可动部用检测激励电极251a及固定部用检测激励电极551a和可动部用检测激励电极251b及固定部用检测激励电极551b以间隔大的区域和间隔小的区域相反的方式形成。由此,可以使用上述图2所示的控制部600构成同样的角速度传感器系统。
[0115]
据此,固定部用检测电极531a、531b和固定部用检测激励电极551a、551b隔着质量部30配置。因此,与固定部用检测电极531a、531b连接的配线等和与固定部用检测激励电极551a、551b连接的配线等难以接近地配置。因此,能够抑制配线间的相互干涉,能够使控制稳定,并且能够实现检测精度的提高。
[0116]
《第三实施方式》
[0117]
对第三实施方式进行说明。相对于第二实施方式,第三实施方式变更了质量部30的结构。关于其它,由于与第二实施方式相同,因此在此省略说明。
[0118]
就本实施方式的角速度传感器1而言,如图5所示,质量部30被分割成第一质量部301和第二质量部302,其沿着x轴方向排列。此外,第一质量部301和第二质量部302为相同大小,且为相同质量。
[0119]
而且,第一质量部301和第二质量部302经由使第一质量部301和第二质量部302沿x轴方向位移的连杆弹簧303连接。此外,第一质量部301及第二质量部302分别经由检测弹簧42a、42b与各板41a、41b连接。
[0120]
在此,就可动部20而言,通过使质量部30为上述结构,如图6a所示,在x轴方向上,可以实现第一质量部301和第二质量部302向相同方向位移的同相模式下的振动。另外,就可动部20而言,如图6b所示,可以实现第一质量部301和第二质量部302向相反方向位移的反相模式下的振动。在本实施方式中,可动部20在未被施加角速度的情况下以反相模式进行振动,如果被施加了角速度,则通过科氏力施加同相模式的振动。因此,以下,也将质量部
30以反相模式进行振动称为非检测模式下的振动,也将质量部30以同相模式进行振动称为检测模式下的振动。
[0121]
而且,可动部20通过设为上述结构,如图7所示,成为具有检测模式下的检测谐振频率fs和非检测模式下的非检测谐振频率fsa的结构。即,本实施方式的可动部20成为在沿着x轴方向的方向上具有不同谐振频率的结构。此外,在图7中,与上述图2相同,将与可动部20的沿着y轴方向的振动相关的频率和振幅的关系表示为驱动特性,将与可动部20的沿着x轴方向的振动相关的频率和振幅的关系表示为检测特性。另外,在本实施方式中,驱动谐振频率fd和非检测谐振频率fsa为不同的值。
[0122]
并且,在本实施方式中,检测弹簧42a、42b和连杆弹簧303的以y轴方向为法线方向的截面的形状相同。即,检测弹簧42a、42b和连杆弹簧303的沿着挠曲的方向的截面形状相同。即,检测弹簧42a、42b和连杆弹簧303的沿着x轴方向的梁宽和沿着z轴方向的梁厚相等。因此,在梁因温度变化等影响而膨胀时,检测弹簧42a、42b和连杆弹簧303的变形的差异变小。由此,即使产生了温度变化等,检测谐振频率fs和非检测谐振频率fsa的关系也难以变化。
[0123]
此外,在本实施方式中,与上述第二实施方式相同,可动部用检测电极231a、231b及固定部用检测电极531a、531b相对于质量部30配置于一侧。可动部用检测激励电极251a、251b及固定部用检测激励电极551a、551b相对于质量部30配置于另一侧。而且,可动部用检测电极231a、231b和固定部用检测电极531a、531b以间隔大的区域和间隔小的区域相反的方式形成。可动部用检测激励电极251a、251b和固定部用检测激励电极551a、551b以间隔大的区域和间隔小的区域相反的方式形成。因此,在可动部20以检测模式进行振动时及以非检测模式进行振动时,能够适宜地得到差动放大。
[0124]
接着,对于本实施方式的角速度传感器系统,参照图8对其与第一实施方式不同的部分进行说明。此外,图8中的fd、fsa表示频率。
[0125]
第二pll电路710以从第二取出电路690输入的信号的频率成为非检测模式的非检测谐振频率fsa的方式进行输出。
[0126]
第二频率控制器720与第二pll电路710连接,将从第二pll电路710输出的信号的频率数值化。而且,第二频率控制器720对固定部用检测调整电极541a、541b施加直流电压以使经数值化的频率成为希望的非检测谐振频率(即图中的设定点4)。由此,在可动部20(即可动部用检测调整电极241a、241b)和固定部用检测调整电极541a、541b之间产生电弹簧效应。而且,在角速度传感器1中,通过电弹簧效应调整检测弹簧42a、42b、连杆弹簧303的弹簧常数,将可动部20的非检测谐振频率维持在fsa。因此,将可动部20的检测模式的检测谐振频率维持在fs。即,在本实施方式中,通过将非检测模式的非检测谐振频率fsa维持一定而间接地维持检测模式的检测谐振频率fs。
[0127]
在第二积分器730中,施加规定的电压值(即图8中的振幅)。而且,经由第二积分器730及第二电压输入电路680向固定部用检测激励电极551a、551b输入具有规定的振幅的频率fsa的交流电压。因此,可动部20沿着x轴方向以非检测模式进行检测谐振。
[0128]
另外,第二同步检波电路700通过lpf降低检测谐振的影响。在本实施方式中,如上所述,因为可动部20以非检测谐振频率fsa进行检测谐振,所以在lpf中去除驱动谐振频率fd和非检测谐振频率fsa之差的绝对值(即|fsa-fd|)以上的频率。由此,检测角速度。
[0129]
如以上所说明,在本实施方式中,质量部30为如下结构:第一质量部301和第二质量部302经由连杆弹簧303连接,在沿着x轴方向的方向上具有检测谐振频率fs和非检测谐振频率fsa。控制部600通过维持可动部20的沿着x轴方向的非检测谐振频率fsa来维持检测谐振频率fs。而且,控制部600去除|fsa-fd|以上的频率而检测角速度。因此,即使在驱动谐振频率fd和检测谐振频率fs相近的情况下,也能够提高截止频率。因此,能够实现角速度的检测频带的提高。
[0130]
另外,在本实施方式中,因为科氏力所引起的振动的频率和非检测谐振频率fsa不同,所以即使在驱动谐振频率fd和检测谐振频率fs一致的情况下,也能够仅有效地提取科氏力所引起的振动。
[0131]
而且,在本实施方式中,检测弹簧42a、42b和连杆弹簧303的以y轴方向为法线方向的截面的形状相同。因此,在梁因温度变化等影响而膨胀时,检测弹簧42a、42b和连杆弹簧303的变形的差异变小。因此,检测谐振频率fs和非检测谐振频率fsa的关系难以变化。由此,因为通过维持非检测谐振频率fsa还可维持检测谐振频率fs,所以能够进一步抑制检测精度降低。
[0132]
《第四实施方式》
[0133]
对第四实施方式进行说明。相对于第三实施方式,本实施方式变更了第二频率控制器720的动作。关于其它,因为与第三实施方式相同,所以在此省略说明。
[0134]
本实施方式的角速度传感器1的结构与上述第三实施方式相同。对于本实施方式的角速度传感器系统,参照图9对其与第三实施方式不同的部分进行说明。此外,图9中的fd、fsa表示频率。
[0135]
本实施方式的第二频率控制器720构成为能够根据非检测谐振频率fsa推定检测谐振频率fs。具体而言,在本实施方式中,通过实验等预先掌握检测谐振频率fs和非检测谐振频率fsa的关系。第二频率控制器720为具备运算器720a且该运算器720a具有预先存储有检测谐振频率fs和非检测谐振频率fsa的关系的存储部的结构。
[0136]
而且,第二频率控制器720使用运算器720a,根据从第二pll电路710输出的信号的频率fsa推定检测模式的检测谐振频率fs。第二频率控制器720对固定部用检测调整电极541a、541b施加直流电压以使推定出的频率成为希望的检测谐振频率(即图9中的设定点5)。由此,通过在可动部20(即可动部用检测调整电极241a、241b)和固定部用检测调整电极541a、541b之间产生的电弹簧效应调整检测弹簧42a、42b、连杆弹簧303的弹簧常数,将可动部20的检测谐振频率维持在fs。即,与上述第三实施方式相比,在本实施方式中,直接维持检测模式的谐振频率fs。
[0137]
如以上所说明,在本实施方式中,预先掌握非检测模式的非检测谐振频率fsa和检测模式的检测谐振频率fs的关系。因此,可掌握对连杆弹簧303的制造偏差等误差也加以考虑的关系。而且,控制部600根据从第二pll电路710输出的信号推定检测模式的检测谐振频率fs,并使推定出的检测模式的检测谐振频率fs维持在一定的值。因此,能够更高精度地进行角速度的检测。
[0138]
《第五实施方式》
[0139]
对第五实施方式进行说明。相对于第一实施方式,第五实施方式在控制部600追加了第一ftr(force to rebalance(强制平衡)的简称)控制器及第二ftr控制器等。关于其
它,由于与第一实施方式相同,因此在此省略说明。
[0140]
本实施方式的角速度传感器1的结构与上述第一实施方式相同。对于本实施方式的角速度传感器系统,参照图10对其与第一实施方式不同的部分进行说明。此外,图10中的fd、fs表示频率,x、y表示信号的种类。
[0141]
如图10所示,在本实施方式的控制部600,追加了第一ftr控制器740、第二ftr控制器750、第一加法器760、第二加法器770、第三积分器780、第四积分器790。
[0142]
第一ftr控制器740及第二ftr控制器750与第二同步检波电路700连接。第一加法器760经由第三积分器780与第一ftr控制器740及第一pll电路630连接,并且经由第四积分器790与第二ftr控制器750及第一pll电路630连接。第二加法器770与第一加法器760连接,并且经由第二积分器730与第二pll电路710连接。
[0143]
在此,以下,在从第二同步检波电路700输出的信号中,将与参考信号为相同相位成分的振幅量设为x输出,将相位与参考信号的相位相差90
°
的成分的振幅量设为y输出。
[0144]
第一ftr控制器740被从第二同步检波电路700输入x输出,并经由第三积分器780输出将该x输出反馈控制为0(即图10中的设定点0)的频率fd的交流电压。而且,基于从第一ftr控制器740输出的信号检测角速度。
[0145]
另外,第二ftr控制器750被从第二同步检波电路700输入y输出,并经由第四积分器790输出将该y输出反馈控制为0(即图10中的设定点0)的频率fd的交流电压。从第四积分器790输出的信号与从第三积分器780输出的信号相差90
°
的相位。此外,如后所述,本实施方式也可以适用于上述第三实施方式。而且,在驱动谐振频率fd和检测谐振频率fs一致的情况下,基于从第二ftr控制器750输出的信号检测角速度。
[0146]
第一加法器760将从第一ftr控制器740及第一pll电路630经由第三积分器780输入的信号和从第二ftr控制器750及第一pll电路630经由第四积分器790输入的信号相加,并输出到第二加法器770。此外,向第四积分器790输入与从第一pll电路630输出的信号相差90
°
的相位的信号。
[0147]
第二加法器770将从第二pll电路710经由第二积分器730输入的信号和从第一加法器760输入的信号相加,并输出到第二电压输入电路680。由此,对固定部用检测激励电极551a、551b施加将不使质量部30沿着x轴方向以频率fd振动的交流电压和使质量部30以频率fs振动的交流电压叠加所得的交流电压。即,对固定部用检测激励电极551a、551b施加包含将科氏力消除的电压的交流电压。因此,可动部20成为将质量部30的沿着x轴方向的频率fd的振动幅度始终控制为0的状态。
[0148]
如以上所说明,在本实施方式中,具备第一ftr控制器740及第二ftr控制器750等,以质量部30的沿着x轴方向的频率fd的振动幅度始终为0的方式进行反馈控制。因此,在角速度传感器1中,即使在使成为振子的可动部20的q值较高的情况下或者在驱动谐振频率fd和检测谐振频率fs之差小的情况下,也能提高响应性。
[0149]
《第六实施方式》
[0150]
对第六实施方式进行说明。相对于第五实施方式,第六实施方式具备可动部用ftr电极及固定部用ftr电极。关于其它,由于与第五实施方式相同,因此在此省略说明。
[0151]
首先,对本实施方式的角速度传感器1的结构进行说明。如图11所示,在本实施方式的角速度传感器1中,具备可动部用ftr电极部260a、260b及固定部用ftr电极部560a、
560b。
[0152]
可动部用ftr电极部260a、260b设置于质量部30中的沿着y轴方向的各一边30b、30d。而且,可动部用ftr电极部260a、260b为具有可动部用ftr电极261a、261b和支承该可动部用ftr电极261a、261b的支承部262a、262b的结构。具体而言,支承部262a、262b以从质量部30沿着x轴方向突出的方式形成。可动部用ftr电极261a、261b以从支承部262a、262b沿着y轴方向延伸出的方式设置于支承部262a、262b。此外,可动部用ftr电极261a、261b向支承部262a、262b的两侧延伸出。
[0153]
固定部用ftr电极部560a、560b为具有以与可动部用ftr电极261a、261b的梳齿啮合的方式沿y轴方向延伸出的固定部用ftr电极561a、561b和支承固定部用ftr电极561a、561b的支承部562a、562b的结构。
[0154]
另外,可动部用ftr电极261a、261b和固定部用ftr电极561a、561b的间隔的关系与可动部用检测电极231a、231b和固定部用检测电极531a、531b的间隔的关系等相同。即,可动部用ftr电极261a、261b和固定部用ftr电极561a、561b以质量部30侧的固定部用ftr电极561a、561b和可动部用ftr电极261a的间隔大于与质量部30侧相反的一侧的固定部用ftr电极561a、561b和可动部用ftr电极261a、261b的间隔的方式形成。
[0155]
接着,对于本实施方式的角速度传感器系统,参照图12对其与第五实施方式不同的部分进行说明。此外,图12中的fd、fs表示频率。
[0156]
如上所述,在本实施方式中,在角速度传感器1上形成有固定部用ftr电极561a、561b,能够对该固定部用ftr电极561a、561b施加规定的电压。因此,与上述第五实施方式相比,控制部600为不具备第二加法器770而具备第三电压输入电路800的结构。
[0157]
第三电压输入电路800与第一电压输入电路610及第二电压输入电路680相同,为具有偏压施加电路、反相电路、非反相电路等的结构,与各固定部用ftr电极561a、561b连接。另外,第三电压输入电路800与第一加法器760连接。
[0158]
而且,第三电压输入电路800对被输入的信号施加规定的偏压,并且生成将相位反转180
°
的信号和非反转的信号两种信号,向各固定部用ftr电极561a、561b中的一方输入反相信号,向另一方输入非反相信号。由此,可动部20成为将质量部30的沿着x轴方向的频率fd的振动幅度反馈控制为0的状态。
[0159]
如以上所说明,在本实施方式中,在角速度传感器1中具备可动部用ftr电极261a、261b及固定部用ftr电极561a、561b。因此,只要将施加于固定部用检测激励电极551a、551b的交流电压和施加于固定部用ftr电极561a、561b的交流电压分开控制即可,因此能够使控制稳定,并且能够实现检测精度的提高。
[0160]
《第七实施方式》
[0161]
对第七实施方式进行说明。相对于第一实施方式,第七实施方式在控制部600追加了第三同步检波电路。关于其它,由于与第一实施方式相同,因此在此省略说明。
[0162]
对于本实施方式的角速度传感器系统,参照图13对其与第一实施方式不同的部分进行说明。此外,图13中的fd、fs表示频率。
[0163]
在本实施方式的控制部600,追加了第三同步检波电路810、第二振幅控制器820、第五积分器830。此外,在图13中,将图3所示的振幅控制器660表示为第一振幅控制器660。
[0164]
第三同步检波电路810与第二取出电路690及第二pll电路710连接,以从第二pll
电路710输出的信号为参考信号对从第二取出电路690输出的信号进行同步检波。而且,第三同步检波电路810将与参考信号相同的频率成分的振幅量输出到第二振幅控制器820,并且将与参考信号相同的频率的信号输出到第五积分器830。
[0165]
第二振幅控制器820与第三同步检波电路810连接,如果从第三同步检波电路810向第二振幅控制器820输入了振幅量,则第二振幅控制器820以使该振幅量成为希望的检测谐振的振幅量(即图13中的设定点6)的方式调整电压值并将其输出到第五积分器830。由此,经由第五积分器830及第二电压输入电路680向固定部用检测激励电极551a、551b输入具有经过控制的电压值的频率fs的交流电压。因此,可动部20沿着x轴方向以一定的振幅进行检测谐振。
[0166]
据此,即使施加了温度变化或冲击等,也能够将检测谐振的振幅维持一定。因此,能够高精度地检测出检测谐振频率fs,容易维持希望的检测谐振频率fs。因此,能够进一步提高角速度的检测精度。
[0167]
《其它实施方式》
[0168]
本公开依据实施方式进行了描述,但应理解本公开并不限定于该实施方式或结构。本公开也包含各种变形例或等同范围内的变形。而且,各种组合或方式、以及使它们仅包含一个要素、包含更多或更少的要素的其它组合或方式也落入本公开的范畴或思想范围内。
[0169]
例如,在上述各实施方式中,对驱动弹簧调整部具有可动部用驱动调整电极211a、211b和固定部用驱动调整电极511a、511b、通过电弹簧效应调整驱动弹簧43a、43b的弹簧常数的例子进行了说明。但是,驱动弹簧调整部只要为可以调整驱动弹簧43a、43b的弹簧常数的结构即可,也可以为其它结构。例如,驱动弹簧调整部也可以具有如下结构:通过电磁力调整驱动弹簧43a、43b的弹簧常数。另外,驱动弹簧调整部也可以具有如下结构:通过改变温度而改变驱动弹簧43a、43b的物性值或者改变形状,从而调整驱动弹簧43a、43b的弹簧常数。
[0170]
同样,在上述各实施方式中,对检测弹簧调整部具有可动部用检测调整电极241a、241b和固定部用检测调整电极541a、541b、通过电弹簧效应调整检测弹簧42a、42b的弹簧常数的例子进行了说明。但是,检测弹簧调整部只要为可以调整检测弹簧42a、42b的弹簧常数的结构即可,也可以为其它结构。即,检测弹簧调整部与上述驱动弹簧调整部相同,可以具有通过电磁力调整检测弹簧42a、42b的弹簧常数的结构,也可以具有通过温度调整检测弹簧42a、42b的弹簧常数的结构。
[0171]
而且,在上述各实施方式中,对在角速度传感器1中具备例如可动部用检测电极231a及固定部用检测电极531a和可动部用检测电极231b及固定部用检测电极531b、对固定部用检测电极531a、531b的信号进行差动放大的例子进行了说明。但是,角速度传感器1也可以为仅具备可动部用检测电极231a及固定部用检测电极531a和可动部用检测电极231b及固定部用检测电极531b中的任一方的结构。另外,其它的可动部用检测激励电极251a、251b及固定部用检测激励电极551a、551b等也相同,也可以为仅具备其中任一方的结构。
[0172]
另外,在上述各实施方式中,在使可动部20进行驱动谐振及检测谐振时,可以使检测谐振的振幅与驱动谐振的振幅相等,也可以使检测谐振的振幅大于驱动谐振的振幅。
[0173]
而且,在上述各实施方式中,可以适当地变更可动部用驱动调整电极部210a、210b
及固定部用驱动调整电极部510a、510b的形状。例如,如图14a所示,固定部用驱动调整电极部510a、510b也可以从板41a、41b侧形成多个狭缝513a、513b。据此,通过狭缝513a、513b能够降低阻尼。另外,固定部用驱动调整电极部510a、510b例如对半导体层12进行drie(deep reactive ion etching(深等离子体刻蚀)的简称)而形成。在该情况下,通过形成狭缝513a、513b,能够提高进行drie时的气体的流动性,能够实现加工精度的提高。因此,能够抑制检测精度偏差,并且能够实现检测精度的提高。
[0174]
另外,如图14b所示,可动部用驱动调整电极部210a、210b也可以为具有从板41a、41b沿着y轴方向突出的梳齿状的可动部用驱动调整电极211a、211b的结构。而且,固定部用驱动调整电极部510a、510b也可以为具有以与可动部用驱动调整电极211a、211b的梳齿啮合的方式沿y轴方向延伸出的梳齿状的固定部用驱动调整电极511a、511b和支承固定部用驱动调整电极511a、511b的支承部512a、512b的结构。据此,能够进一步降低阻尼,并且能够实现加工精度的提高。
[0175]
而且,如图14c所示,可动部用驱动调整电极部210a、210b也可以为具有可动部用驱动调整电极211a、211b和支承该可动部用驱动调整电极211a、211b的支承部212a、212b的结构。具体而言,支承部212a、212b以从板41a、41b沿着y轴方向突出的方式形成。而且,可动部用驱动调整电极211a、211b以从支承部212a、212b沿着x轴方向延伸出的方式设置于支承部212a、212b。在该情况下,固定部用驱动调整电极部510a、510b为具有以与可动部用驱动调整电极211a、211b的梳齿啮合的方式沿x轴方向延伸出的梳齿状的固定部用驱动调整电极511a、511b和支承固定部用驱动调整电极511a、511b的支承部512a、512b的结构。据此,容易增大可动部用驱动调整电极211a、211b和固定部用驱动调整电极511a、511b的对置面积,因此,即使增大可动部用驱动调整电极211a、211b和固定部用驱动调整电极511a、511b的间隔,也能够产生希望的电弹簧效应。因此,即使增大驱动振动,也能够抑制可动部用驱动调整电极211a、211b和固定部用驱动调整电极511a、511b接触,能够增大灵敏度。
[0176]
而且,也可以将上述各实施方式适当地组合。例如,也可以将上述第二实施方式与第五~第七实施方式组合,变更可动部用检测电极231a、231b、可动部用检测激励电极251a、251b、固定部用检测电极531a、531b及固定部用检测激励电极551a、551b的配置关系。另外,也可以将上述第三、第四实施方式与第五~第七实施方式组合,使质量部30为具有第一质量部301、第二质量部302、连杆弹簧303的结构。另外,也可以将上述第五、第六实施方式与第七实施方式组合,设为具有第一ftr控制器740及第二ftr控制器750等的结构。而且,也可以将组合上述各实施方式而得的实施方式彼此进一步组合。
[0177]
本公开所记载的控制部及其方法也可以通过以下的专用计算机实现:该专用计算机是通过构成以执行用计算机程序具体化的一个或多个功能的方式编程的处理器及存储器而提供的。或者,本公开所记载的控制部及其方法也可以通过以下的专用计算机实现:该专用计算机是通过利用一个以上的专用硬件逻辑电路构成处理器而提供的。或者,本公开所记载的控制部及其方法也可以通过以下的一个以上的专用计算机实现:该一个以上的专用计算机是通过以执行一个或多个功能的方式编程的处理器及存储器和包含一个以上的硬件逻辑电路的处理器的组合构成的。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读非过渡有形记录介质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1