用于卫生洁具的光学检查的设备的制作方法
1.本发明涉及用于卫生洁具(sanitaryware)的光学检查的设备和方法。
背景技术:
2.本发明解决例如抽水马桶、脸盆、盥洗台、坐浴盆、小便池、浴缸和淋浴盆的陶瓷卫生洁具的生产。这种卫生洁具通常是通过粉浆浇铸法制造的,粉浆浇铸法会导致生产有缺陷的零件。在陶瓷件的生产过程中,特别是在浇铸成形、干燥的步骤之后和烧制过程(通常是陶瓷生产过程的最后一步)结束时,进行质量检查。进行这样的质量检查是为了识别缺陷的存在,以避免加工有缺陷的半成品和/或在市场上投放不合规的零件。更具体而言,质量检查识别出缺陷程度低的可以返工的零件,以及缺陷程度高的必须报废的零件。质量检查也可能有助于对生产过程采取纠正措施。
3.传统上,质量检查是由专业操作员进行的,该操作员在浇铸成形、干燥和烧制的步骤后用肉眼检查成品零件,以识别可能的成形错误、变形和表面不规则性,并使用诸如外部量规、模板和塞规的仪器进行人工测量以识别尺寸的不规则性。这种质量检查非常耗时且可靠性有限,因为它取决于操作员的经验和专业技术。
4.在陶瓷盘的制造领域中,专利文献us2003/0184740a1公开了一种光学检查机器,其包括被配置为用扩散光照射待检测零件的照明器和位于光扩散器的开口的固定位置并被配置为从上方观察零件的摄像机。然而,该机器不适合检查具有多个待检查的表面的较复杂的对象,例如卫生洁具。此外,从专利文献jph06148093a中已知一种用于卫生洁具的光学检查机器,其包括机械臂;该机器的检查效率有限。
技术实现要素:
5.本发明的目的是提供用于卫生洁具的光学检查的设备和方法,以克服现有技术的上述缺陷。
6.上述目的通过所附权利要求表征的本发明的设备和方法而被完全实现。
7.更具体而言,本发明涉及一种用于卫生洁具的光学检查的设备。卫生洁具通常包括陶瓷体,该陶瓷体可以处于塑性状态,也可以在浇铸和干燥的过程后被干燥。在这些情况下,卫生洁具是半成品。卫生洁具可包括(烧制后)带有釉料涂层的陶瓷体;在这种情况下,卫生洁具是成品。
8.优选地,该设备包括支撑装置,其被配置为将待检查的卫生洁具接收在检查位置。
9.该设备包括至少一个摄像机,其被配置为捕获位于检查位置处的被检查的卫生洁具的多个图像。
10.该设备包括自动臂,其能相对于支撑装置(即,相对于位于检查位置处的被检查的卫生洁具,即,相对于固定参考物)在多个操作位置之间移动。至少一个摄像机安装在自动臂上(或与自动臂相关联)。优选地,至少一个摄像机安装在自动臂的自由端部处(自动臂在可与平坦的支撑表面连接的第一固定端部和相对于平坦的支撑表面可移动的第二自由端
部之间延伸。优选地,该设备包括与机械臂的自由端部相关联的头部(或检查头部)。该至少一个摄像机优选安装在检查头部上。
11.该设备包括控制单元,其被配置为接收由至少一个摄像机捕获的多个图像。控制单元能访问数据库(或存储器)。在一个实施方式中,数据库被包括在该设备中。在一个实施方式中,数据库是远程的。该数据库包括参考数据。在一个实施方式中,参考数据包括没有缺陷的参考卫生洁具的图像。
12.在一个实施方式中,参考数据包括参考卫生洁具的标准尺寸。
13.在一个实施方式中,参考数据包括参考尺寸的参考公差。
14.在一个实施方式中,参考数据涉及(或代表)一个或多个特征缺陷。
15.在一个实施方式中,参考数据包括自动臂的一系列操作位置。
16.控制单元被配置为根据参考数据处理多个图像以提供有关该卫生洁具的缺陷的诊断信息。例如,控制单元可以被配置为将捕获的图像与该卫生洁具的参考图像进行比较,以便检测它们之间的差异。控制单元还可以被配置为从捕获的图像中导出实际测量值,并将实际测量值与标准尺寸进行比较,以便检测出它们之间的差异(具体而言,参考公差之间的差异)。控制单元还可以被配置为将捕获的图像(或其部分)与典型缺陷的图像进行比较,以便检测出所检查的卫生洁具中是否存在缺陷。
17.因此,本发明的设备能够以良好的可靠性水平自动检查该卫生洁具。
18.优选地,自动臂包括机械手。优选地,自动臂限定(或者是)机械臂。机械臂具有多个自由度(优选地,至少五个自由度或至少六个自由度)以在多个操作位置之间移动。在一个实施方式中,机械臂包括基座和头部(即,它在基座与头部之间延伸)。基座是可操作地固定的。换言之,基座被配置为固定到平坦的支撑表面上。头部是可操作地移动的。更具体而言,头部可相对于基座移动;优选地,头部能以(至少)五个自由度移动。
19.在一个实施方式中,该设备包括至少一个照明器,其被配置为照射位于检查位置处(即,在支撑装置上)的被检查的卫生洁具。
20.在一个实施方式中,至少一个照明器安装在自动臂上。在一个实施方式中,至少一个照明器安装在机械臂的头部上。
21.在一个实施方式中,控制单元被配置为接收输入数据。输入数据表示待检查的卫生洁具的类型。该类型可以包括一种卫生洁具(例如,盥洗台或淋浴盆或抽水马桶)和/或特定型号。在一个实施方式中,输入数据还可以表示期望的卫生洁具质量(例如,第一选择或第二选择)。
22.在一个实施方式中,控制单元被配置为根据输入数据从数据库中选择参考数据。控制单元被配置为根据输入数据查询数据库以便获取参考数据。
23.在一个实施方式中,控制单元被配置为根据输入数据驱动自动臂通过多个操作位置中的一系列预定的操作位置。
24.在一个实施方式中,支撑装置包括围绕竖直旋转轴线旋转的旋转平台。在一个实施方式中,控制单元被配置为与支撑装置(即,旋转平台)协调地(同时)驱动自动(或机械)臂。在一个实施方式中,旋转平台被配置为将该卫生洁具可支撑地接收在检查位置。在一个实施方式中,在检查位置,该卫生洁具搁置在旋转平台上。
25.在支撑装置包括旋转平台的实施方式中,控制单元被配置为根据输入数据驱动支
撑装置旋转。更具体而言,控制单元被配置为根据输入数据协调地(同时)驱动自动臂和支撑装置。
26.在一个实施方式中,该设备包括被配置为捕获多个图像的多个摄像机。因此,在一个实施方式中,至少一个摄像机包括多个摄像机。在一个实施方式中,多个摄像机与自动臂相关联。在一个实施方式中,多个摄像机安装在机械臂的头部上。
27.优选地,多个(或其中一些)摄像机的观察轴是关联的(incident)。更具体而言,多个(或其中一些)摄像机的观察轴会聚在单个点(检查点)。
28.在一个实施方式中,多个摄像机包括被配置为捕获卫生洁具的第一图像(或扫描)的第一组摄像机。优选地,第一组摄像机彼此连接成立体构造以捕获三维图像。更具体而言,第一组摄像机中的摄像机限定了3d扫描仪。因此,第一图像优选是三维图像。在下文中,参照第一图像为三维的实施方式,而不因此将本发明限于该实施方式;实际上,应注意的是,在其他实施方式中,第一图像(或其中一些)是二维的。
29.在一个实施方式中,多个摄像机包括被配置为捕获卫生洁具的第二图像的第二组摄像机。在一个实施方式中,第二图像是二维的。在下文中,参照第二图像为二维的实施方式,而不因此将本发明限于该实施方式;实际上,应注意的是,在其他实施方式中,第二图像(或其中一些)是三维的。
30.在一个实施方式中,第一组摄像机中的摄像机可以与第二组摄像机中的摄像机重合;更具体而言,相同的摄像机捕获二维图像,并且当连接成立体构造时,它们捕获三维图像。
31.在一个实施方式中,该设备包括被配置为照射被检查的卫生洁具的多个照明器。在一个实施方式中,多个照明器与自动臂相关联。在一个实施方式中,多个照明器安装在机械臂的头部上。
32.优选地,多个(或其中一些)照明器的照射方向是关联的。更具体而言,多个(或其中一些)照明器的照射方向会聚在单个点(优选检查点)。
33.在一个实施方式中,多个照明器包括中央照明器和设置在中央照明器的侧面的多个侧向照明器。更具体而言,多个照明器包括设置在头部的相对于中央照明器的相对两侧的第一组侧向照明器和第二组侧向照明器。在一个实施方式中,第一组照明器和第二组照明器关于穿过中央照明器的轴线对称。在一个实施方式中,第一组照明器和第二组照明器各自包括至少一个照明器。在一个实施方式中,第一组照明器和第二组照明器各自包括至少两个照明器。在一个实施方式中,第一组照明器和第二组照明器各自包括至少三个照明器。
34.在一个实施方式中,第二组摄像机中的摄像机定位在中央照明器周围。在一个实施方式中,第二组摄像机中的摄像机介于第一组侧向照明器和第二组侧向照明器之间。更具体而言,第二组摄像机包括围绕中央照明器对称设置的四个摄像机。
35.在一个实施方式中,第一组摄像机设置在头部的相对两侧,在侧向照明器的外侧。更具体而言,第一组摄像机包括至少第一摄像机和至少第二摄像机(在一个实施方式中,至少第一对摄像机和至少第二对摄像机)。因此,第一组侧向照明器和第二组侧向照明器介于第一组摄像机中的摄像机之间。更具体而言,第一组侧向照明器介于中央照明器与第一组摄像机中的第一摄像机(或第一对摄像机)之间;第二组侧向照明器介于中央照明器与第一
组摄像机中的第二摄像机(或第二对摄像机)之间。
36.在一个实施方式中,多个照明器包括结构化照明器,其被配置为将结构化光投射到被检查的卫生洁具上。更具体而言,结构化照明器可以由被配置为显示预定图案(例如,线条图案)的屏幕限定。屏幕设有背光。因此,结构化照明器被配置为将预定图案投射到被检查的卫生洁具的表面上。
37.在一个实施方式中,多个摄像机中的摄像机包括一个或多个摄像机(第一组和/或第二组或另一组中),其被配置为检测由该卫生洁具的表面反射的光(该光由结构化照明器即屏幕投射到卫生洁具的表面上),以通过偏转测量(deflectometry)分析检测表面反射率缺陷。
38.在一个实施方式中,控制单元被配置为根据输入数据和/或三维图像选择性地启用多个照明器中的一个或多个照明器。在另一个实施方式中,照明器在整个检查持续时间内保持启用。
39.在一个实施方式中,控制单元被配置为启用第一组摄像机以捕获卫生洁具的三维图像,然后处理该三维图像。在一个实施方式中,控制单元被配置为根据输入数据和/或三维图像按预定顺序选择性地启用第二组摄像机中的一个或多个摄像机和/或多个照明器中的一个或多个照明器。控制单元被配置为根据输入数据和/或三维图像驱动机械臂移动通过一系列预定的操作位置。更具体而言,控制单元被配置为与机械臂的移动协调地按预定顺序选择性地启用第二组摄像机中的一个或多个摄像机和/或多个照明器中的一个或多个照明器,以便对于机械臂所在的每个操作位置,启用一个或多个摄像机和/或一个或多个照明器来捕获卫生洁具的表面的至少一个图像。优选地,控制单元根据输入数据(包括待检查的卫生洁具的类型和/或用户选择的检查设置)选择机械臂被驱动到的操作位置(因此,一个或多个照明器和一个或多个摄像机被启用的位置)。优选地,控制单元根据第一组摄像机捕获的三维图像选择机械臂被驱动到的操作位置(因此,一个或多个照明器和一个或多个摄像机被启用的位置)。实际上,这些三维图像表明了卫生洁具的类型;控制单元还可以被配置为在三维图像中识别卫生洁具(或其表面)的推荐进一步(更深入)分析的一个或多个关键区域。实际上,第二组摄像机中的摄像机优选具有比第一组摄像机中的摄像机更高的分辨率。
40.在一个实施方式中,该设备包括发射器(至少一个)。在一个实施方式中,发射器是麦克风(并因此被配置为发射声波)。在一个实施方式中,发射器是加速度计。在一个实施方式中,发射器与自动臂相关联(特别地,它安装在机械臂的头部上)。在另一个实施方式中,发射器与自动臂是分开的。发射器被配置为发射指向被检查的卫生洁具的波(例如,声波)。
41.在一个实施方式中,该设备包括传感器,其被配置为接收来自卫生洁具(或来自其表面)的反射波,并生成表示该波在被检查的卫生洁具上的反射的信号。控制单元被配置为接收表示波在被检查的卫生洁具上的反射的信号并处理表示波的反射的信号,以便提供诊断信息。更具体而言,声波的反射可用于检测诸如破损和小裂缝(难以用肉眼或摄像机检测到)的缺陷。
42.在一个实施方式中,多个摄像机包括至少一个伸缩式摄像机,该伸缩式摄像机能在该伸缩式摄像机被容纳在机械臂的头部中的缩回位置与该伸缩式摄像机从机械臂的头部伸出的拔出位置之间移动。该至少一个伸缩式摄像机特别适合检查卫生洁具的隐藏区
域—例如,边缘下方。在一个实施方式中,控制单元被配置为根据输入数据和/或第一组摄像机捕获的图像来协调机械臂的移动与至少一个伸缩式摄像机在缩回位置与拔出位置之间的移动。在一个实施方式中,控制单元被配置为根据输入数据和/或三维图像发出指令以拔出伸缩式摄像机。
43.在一个实施方式中,控制单元被配置为根据所捕获的多个图像(即,由所捕获的多个图像)生成被检查的卫生洁具的三维渲染。
44.在一个实施方式中,参考数据包括用于被检查的卫生洁具的多个参考(或标准)尺寸。在一个实施方式中,诊断信息包括与尺寸缺陷相关的(诊断)信息。在一个实施方式中,控制单元被配置为从三维渲染和/或捕获的多个图像中导出被检查的卫生洁具的多个实际尺寸。
45.例如,坐便器的实际尺寸(以及对应的参考尺寸)可以包括以下尺寸中的一种或多种:高度、宽度、边缘深度、足部深度、座椅紧固孔的位置、进水孔轴线距地板的高度。对于盥洗台的支撑柱,实际尺寸(以及对应的参考尺寸)可以包括以下尺寸中的一种或多种:高度、基座宽度、基座深度、盥洗盆联接的区域的宽度。
46.在一个实施方式中,控制单元被配置为将多个实际尺寸与多个参考尺寸的对应的参考尺寸进行比较。
47.在一个实施方式中,控制单元被配置为根据实际尺寸和参考尺寸之间的差异来导出与尺寸缺陷有关的信息。
48.在一个实施方式中,对于多个参考尺寸,参考数据包括对应的多个尺寸公差。特别是对于在使用中不可见的零件尺寸,可接受更高的公差。在一个实施方式中,尺寸公差可由用户基于卫生洁具的期望质量(例如,第一选择或第二选择)来选择。鉴于此,如果实际尺寸(或测量值)与对应的参考尺寸(或测量值)之间的差异大于对应的公差,则控制单元被配置为将卫生洁具标记为有缺陷。
49.与尺寸缺陷有关的信息表示存在或不存在以下缺陷中的一种或多种:变成异形、卫生洁具的平坦表面的平坦度不完美、卫生洁具的正交平坦表面之间的垂直度不完美、翘曲(或缺乏对称性)、卫生洁具边缘的平直度不完美。
50.在一个实施方式中,参考数据包括参考模型。参考模型可以表示没有缺陷的参考卫生洁具和/或有缺陷的卫生洁具。
51.在一个实施方式中,参考数据包括用于捕获的多个图像的对应的多个参考图像,多个参考图像表示没有缺陷的参考卫生洁具。多个参考图像构成参考模型的可能例子。在一个实施方式中,参考数据包括参考卫生洁具(没有缺陷)的三维渲染;该三维渲染构成了参考模型的另一个例子。
52.在一个实施方式中,诊断信息包括与表面缺陷有关的(诊断)信息。
53.在一个实施方式中,控制单元被配置为将捕获的图像与参考模型进行比较,具体而言,与多个参考图像中的对应的参考图像进行比较,和/或将被检查的卫生洁具的三维渲染(由控制单元导出)与参考卫生洁具的三维渲染进行比较。
54.在一个实施方式中,控制单元被配置为根据捕获的图像和对应的参考图像之间的比较来导出与表面缺陷有关的信息。
55.在一个实施方式中,与表面缺陷有关的信息表示(或指示)在卫生洁具表面上存在
或不存在该卫生洁具的(在处于塑性状态和/或干燥的半成品的情况下)成形缺陷、变形或表面光洁度和/或(在成品的情况下)以下表面缺陷(或表面缺陷类型)中的一种或多种:小孔、斑点、污点、团块、起泡、鼓胀、瑕疵、颜色缺陷、光洁度差、裂缝、表面涂布不均。
56.更具体而言,表面缺陷可能会影响卫生洁具的陶瓷体和/或釉面。更具体而言:与表面缺陷有关的信息表示(即指示)卫生洁具的表面上存在或不存在以下表面缺陷(或表面缺陷类型)中一种或多种:粗糙度、气泡(或起泡)、点蚀、开裂(即釉面中大小在50到100微米之间的小裂缝)、表面涂布不均(陶瓷体和釉面中大小在50到100微米之间的裂缝)、裂缝、表面翘曲(表面塌陷部分)、重釉(即与参考表面相比,釉料比所需多的部分)、爆裂(即呈0.5到1毫米大小的小坑的形式的釉面不连续)、气泡(即表面粗糙度过大)、瑕疵(即颜色与表面其余部分的颜色不同的区域)、浅釉(即没有足够的釉料来防止陶瓷体暴露)、釉料收缩(即,釉料在烧制过程中收缩从而露出陶瓷体的区域)、标志缺失或有缺陷、光洁度差(例如,隆起或凸脊或毛刺)、薄胎(即类似于蛋壳的釉面的异常粗糙度)、橘瓣(釉面异常粗糙产生橘瓣效果)、釉面波纹、剥落(即釉面成片状脱落)、釉面无光泽。
57.在一个实施方式中,参考数据包括针对每个缺陷(或缺陷类型)的公差。在一个实施方式中,参考数据包括针对卫生洁具的每个表面和针对每个缺陷(或缺陷类型)的公差。例如,对于卫生洁具的每个表面,参考数据可以包括为可见、半可见或隐藏表面(表明该表面在卫生洁具在使用中时是可见的、半可见的还是隐藏的)的相应的分类;因此,对于每种缺陷类型,参考数据可以包括表面可见时的第一公差、表面半可见时的第二公差和表面隐藏时的第三公差。通常,隐藏表面接受宽公差,而对可见表面应用严格公差。
58.在一个实施方式中,控制单元被配置为接收识别码以识别卫生洁具。更具体而言,控制单元可以被配置为利用至少一个摄像机读取施加在卫生洁具上的识别码(例如,条形码或qr码)。在一个实施方式中,控制单元被配置为从用户接收卫生洁具的识别码。在一个实施方式中,控制单元被配置为将序列识别码分配给每个待检查的卫生洁具。
59.在一个实施方式中,控制单元被配置为生成包含与卫生洁具的识别码相关联的诊断信息的报告文档。
60.在一个实施方式中,该设备包括真空密封测试装置。真空密封测试装置被配置为在卫生洁具的一个或多个内部空间中产生真空并测量该一个或多个内部空间中的(负)压力。在真空密封测试期间,任何开口例如排水出口或供水入口或浮筒被密封。真空密封测试有助于检测内部空间中的隐藏缺陷。
61.在一个实施方式中,该设备包括附加自动臂。在一个实施方式中,附加自动臂限定附加机械臂(优选地,具有至少5个自由度)。在一个实施方式中,附加自动臂被配置为将被检查的卫生洁具定位在支撑装置上的检查位置以及将卫生洁具从检查位置移除。更具体而言,附加自动臂被配置为将卫生洁具从平坦的支撑进料表面抬起,将其移动并放置到旋转平台上,然后将其从旋转平台抬起,将其移动并放回平坦的支撑进料表面上。
62.在一个实施方式中,控制单元被编程为彼此协调地驱动自动臂和附加自动臂。
63.在一个实施方式中,所述至少一个摄像机被配置为在被检查的卫生洁具被附加机械臂抬起时捕获其至少一个图像,以便还检查在其处于检查位置时保持隐藏的卫生洁具的表面。
64.本发明还提供了一种用于卫生洁具的光学检查的方法。
65.该方法包括将待检查的卫生洁具接收到支撑装置上的检查位置的步骤。
66.该方法包括在多个操作位置之间移动自动臂的步骤。在一个实施方式中,移动步骤以自动臂(限定机械臂的自动臂)的至少五个自由度来执行。
67.该方法包括通过至少一个摄像机捕获被检查的卫生洁具的多个图像的步骤,该至少一个摄像机与自动臂相关联(该至少一个摄像机安装在机械臂的头部上)。
68.该方法包括根据参考数据处理多个图像以提供有关该卫生洁具的缺陷的诊断信息的步骤。
69.在一个实施方式中,该方法包括使用安装在机械臂的头部上的至少一个照明器来照射位于检查位置处的卫生洁具的步骤。
70.在一个实施方式中,捕获步骤包括捕获该卫生洁具的第一图像的第一子步骤(在一个实施方式中,第一图像是使用3d摄像机或扫描仪捕获的三维图像)。在一个实施方式中,捕获步骤包括捕获该卫生洁具的一个或多个关键区域的第二图像的第二子步骤(在一个实施方式中,第二图像是使用传统摄像机捕获的二维图像)。
71.在一个实施方式中,该方法包括处理在第一子步骤期间捕获的三维图像以便识别卫生洁具的一个或多个关键区域的步骤。因此,第一子步骤对于识别其中可能存在缺陷的关键区域是有用的,第二子步骤聚焦于这些关键区域。实际上,在第二子步骤期间捕获的图像比在第一子步骤期间捕获的图像更详细(因为它们集中在较小的区域和/或因为它们是使用分辨率更高的摄像机捕获的)。
72.在一个实施方式中,该方法包括将卫生洁具可支撑地接收在支撑装置的旋转平台上的检查位置的步骤。在一个实施方式中,该方法包括使支撑装置的旋转平台围绕竖直轴线旋转的步骤。优选地,旋转步骤与移动自动臂的步骤相协调。
73.在一个实施方式中,在自动臂所在的多个操作位置中的每个操作位置捕获至少一个图像。
74.在一个实施方式中,该方法包括启用第一组摄像机以捕获卫生洁具的第一图像的步骤。在一个实施方式中,第一图像是3d图像。
75.在一个实施方式中,该方法包括处理第一图像的步骤和根据第一图像选择性地启用第二组摄像机中的一个或多个摄像机的步骤。在一个实施方式中,该方法还包括在启用第一组和/或第二组摄像机的同时启用多个照明器中的一个或多个照明器的步骤。在一个实施方式中,该方法包括根据第一图像驱动自动(或机械)臂的步骤(与启用摄像机和/或照明器相协调)。
76.在一个实施方式中,该方法包括拔出伸缩式摄像机的步骤,该伸缩式摄像机可在其容纳在机械臂的头部中的缩回位置与其从机械臂的头部伸出的拔出位置之间移动。优选地,拔出步骤与移动机械臂的步骤相协调。这样,可以检查卫生洁具的隐藏区域,例如边缘下方的区域。
77.在一个实施方式中,该方法包括使用(至少一个)结构化照明器将结构化光投射到被检查的卫生洁具上的步骤。
78.在一个实施方式中,该方法包括发射指向被检查的卫生洁具的波(例如,声波)的步骤和捕获由该卫生洁具的表面反射的波的步骤。该方法然后包括处理表示反射波(或波的反射)的信号以便提供诊断信息的步骤。
79.在一个实施方式中,该方法包括根据所捕获的多个图像生成被检查的卫生洁具的三维(数字)渲染的步骤。
80.在一个实施方式中,该方法包括从三维渲染中导出被检查的卫生洁具的多个实际尺寸的步骤。
81.在一个实施方式中,该方法包括将多个实际尺寸与多个参考尺寸中的对应的参考尺寸进行比较的步骤,以及根据实际尺寸与参考尺寸之间的差异导出与尺寸缺陷相关的诊断信息的步骤。
82.在一个实施方式中,该方法包括将捕获的多个图像中的一个或多个图像与对应的参考图像进行比较以根据捕获的图像与对应的参考图像之间的比较来导出与表面缺陷有关的信息的步骤。
83.在一个实施方式中,该方法包括在控制单元中接收表示卫生洁具的类型的输入数据的步骤。在一个实施方式中,该方法包括根据输入数据查询数据库以便获取参考数据的步骤。
84.在一个实施方式中,根据输入数据驱动自动臂通过多个操作位置中的一系列预定的操作位置。
85.在一个实施方式中,该方法包括在控制单元中接收卫生洁具的识别码的步骤。在一个实施方式中,该方法包括生成包括诊断信息的报告文档的步骤。优选地,报告文档将诊断信息与卫生洁具的识别码相关联。
附图说明
86.根据下面在附图中通过非限制性例子示出的优选实施方式的详细描述,这些和其他特征将变得更加清楚,在附图中:
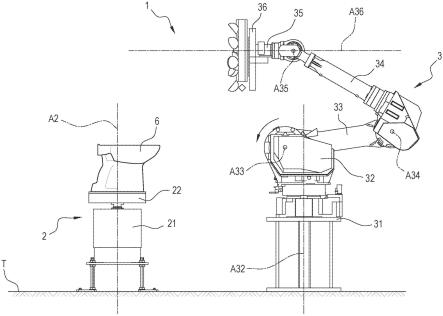
[0087]-图1和图2分别是示出了根据本发明的用于卫生洁具的光学检查的设备在休止位置和伸展位置的侧视图;
[0088]-图3和图4以主视图和立体图示出了图1的设备的一个实施方式中的机械臂的头部;
[0089]-图5和图6以主视图和立体图示出了图1的设备的另一个实施方式中的机械臂的头部;
[0090]-图7a和图7b以由该设备生成的相应的三维渲染示出了卫生洁具;
[0091]-图8示意性示出了图1的设备的操作。
具体实施方式
[0092]
参照附图,附图标记1表示用于卫生洁具的光学检查的设备。
[0093]
设备1包括支撑装置2,其被配置为将卫生洁具6接收在检查位置。支撑装置2包括基座21。基座21被配置为固定到平坦的支撑表面(或地板t)上。因此,基座21相对于地板t可操作地固定。支撑装置2包括平台22,其被配置为可支撑地接收卫生洁具6。平台22可旋转地(或可转动地)联接至基座21以围绕旋转轴线a2相对于基座21旋转。旋转轴线a2是竖直的(平行于重力)。支撑装置2包括被配置为使平台22相对于基座21旋转的旋转致动器23。
[0094]
设备1包括机械臂3。机械臂3包括基座31。基座31被配置为固定到平坦的支撑表面
(或地板t)上。因此,基座31相对于地板t可操作地固定。
[0095]
机械臂3包括旋转元件32。旋转元件32可旋转地(或可转动地)联接至基座31以围绕第一旋转轴线a32相对于基座31旋转。更具体而言,旋转元件32被配置为总是围绕第一旋转轴线a32旋转(360
°
旋转)。在一个实施方式中,旋转元件32被配置为围绕第一旋转轴线a32在第一旋转方向和与第一旋转方向相反的第二旋转方向上旋转。
[0096]
第一旋转轴线a32是竖直的(平行于重力)。机械臂3包括被配置为使旋转元件32相对于基座31旋转的第一旋转致动器371。旋转元件32相对于基座31的旋转限定了机械臂3的第一自由度。
[0097]
机械臂3包括第一分支33。第一分支33可枢转地(或可旋转地)联接至旋转元件32。第一分支33被配置为相对于旋转元件32围绕第二旋转轴线a33旋转。第二旋转轴线a33是水平的(与重力成直角)。第二旋转轴线a33可随旋转元件33一起旋转(在水平旋转平面内)。机械臂3包括被配置为使第一分支33相对于旋转元件32旋转的第二旋转致动器372。第一分支33相对于旋转元件32的旋转限定了机械臂3的第二自由度。
[0098]
机械臂3包括第二分支34。第二分支34可枢转地(或可旋转地)联接至第一分支33。第二分支34被配置为相对于第一分支33围绕第三旋转轴线a34旋转。第三旋转轴线a34是水平的(与重力成直角)。第三旋转轴线a34可随旋转元件32的旋转一起在水平面内旋转,并可通过第一分支33的移动在不同的水平面之间平移。机械臂3包括被配置为使第二分支34相对于第一分支33旋转的第三旋转致动器373。第二分支34相对于第一分支33的旋转限定了机械臂3的第三自由度。
[0099]
机械臂3包括预头部35。预头部35枢转地(或可旋转地)联接至第二分支34。预头部35被配置为相对于第二分支34围绕第四旋转轴线a35旋转。第四旋转轴线a35是水平的(与重力成直角)。第四旋转轴线a35可随旋转元件32的旋转一起在水平面内旋转,并且还可以通过第一分支33和第二分支34的移动在不同的水平面之间平移。机械臂3包括被配置为使预头部35相对于第二分支34旋转的第四旋转致动器374。预头部35相对于第二分支34的旋转限定了机械臂3的第四自由度。
[0100]
机械臂3包括头部36。头部36可旋转地(或可转动地)联接至预头部35。头部36可围绕第五旋转轴线a36旋转。在一个实施方式中,头部36被配置为总是围绕第五旋转轴线a36旋转(360
°
旋转)。在一个实施方式中,头部36被配置为围绕第五旋转轴线a36在第一旋转方向和与第一旋转方向相反的第二旋转方向上旋转。机械臂3包括被配置为使头部36相对于预头部35旋转的第五旋转致动器375。头部36相对于预头部35的旋转限定了机械臂3的第五自由度。
[0101]
在一个实施方式中,第一旋转致动器371、第二旋转致动器372、第三旋转致动器373、第四旋转致动器374和第五旋转致动器375以及平台的致动器23是气动致动器,并且在另一个实施方式中,它们是液压致动器。
[0102]
机械臂3可通过第一旋转致动器371、第二旋转致动器372、第三旋转致动器373、第四旋转致动器374和第五旋转致动器375在多个操作位置(或配置)之间移动。更具体而言,在多个操作位置中的每一个操作位置,头部36指向位于检查位置处的卫生洁具,以观察卫生洁具6。机械臂3还可以在多个非操作位置之间移动,其中头部36不指向位于检查位置处的卫生洁具6,以便将卫生洁具6放置在检查位置(不干扰它)或对机械臂3进行测试或维护。
在非限制性例子中,图1示出了处于第一非操作位置(休止配置)的机械臂3,图2示出了处于第二非操作位置(伸展配置)的机械臂3。
[0103]
头36包括支撑杆361。支撑杆361可相对于预头部35旋转。
[0104]
头部36包括与支撑杆361连接的支撑装置362。在一个实施方式中,支撑装置362可沿着支撑杆361滑动(或平移)。在一个实施方式中,头部36包括端部致动器以使支撑装置362沿着支撑杆361滑动。支撑装置362沿着支撑杆361的平移在可能的情况下限定了机械臂3的第六自由度。
[0105]
头部36包括与支撑杆361的第一端部连接的第一侧向支撑装置363a。头部36包括与支撑杆361的第二端部连接的第二侧向支撑装置363b,其中第二端部与第一端部相对。第一侧向支撑装置363a和第二侧向支撑装置363b与支撑杆361成直角地伸长。
[0106]
设备1包括多个摄像机。
[0107]
更具体而言,设备1包括第一组摄像机。在一个实施方式中,第一组摄像机是3d摄像机(或3d扫描仪)。
[0108]
第一组摄像机包括安装在第一侧向支撑装置363a上的第一摄像机41a。在一个实施方式中,第一组摄像机包括安装在第一侧向支撑装置363a上(在第一侧向支撑装置363a的相对两个端部)的第一对摄像机41a、41a’。第一组摄像机包括安装在第二侧向支撑装置363b上的第二摄像机41b。在一个实施方式中,第一组摄像机包括安装在第二侧向支撑装置363b上(在第二侧向支撑装置363b的相对两个端部)的第二对摄像机41b、41b’。
[0109]
设备1包括第二组摄像机。在一个实施方式中,第二组摄像机是2d摄像机。第二组摄像机包括第一摄像机42a。在一个实施方式中,第二组摄像机包括第二摄像机42b。在一个实施方式中,第二组摄像机包括第三摄像机42c。在一个实施方式中,第二组摄像机包括第四摄像机42d。优选地,第二组的摄像机42a、42b、42c和42d与中央支撑装置362连接。优选地,第二组摄像机42a、42b、42c和42d与中央支撑装置362连接。
[0110]
设备1包括多个照明器。多个照明器包括中央照明器51。中央照明器51位于十字的中心(摄像机42a、42b、42c和42d位于其端部处)。多个照明器包括第一组侧向照明器,第一组侧向照明器又包括三个照明器52a、52b、52c。多个照明器包括第二组侧向照明器,第二组侧向照明器又包括三个照明器53a、53b、53c。第一组侧向照明器52a、52b、52c介于第二组的第一摄像机42a和第一组的第一摄像机41a之间。第二组侧向照明器53a、53b、53c介于第二组的第三摄像机42c和第一组的第二摄像机41b之间。
[0111]
在一个实施方式中,设备1(或多个照明器)包括屏幕55。屏幕55安装在头部36上。屏幕55可以可移除地安装在头部上。屏幕55被配置为将预定图案(例如,一系列平行线)投射到被检查的卫生洁具的表面上。因此,屏幕55限定了结构化照明器。
[0112]
在包括屏幕55的实施方式中,多个摄像机至少还包括第一屏幕摄像机43。多个摄像机还可以包括第二屏幕摄像机44。第一屏幕摄像机43和第二屏幕摄像机44(如果存在的话)被配置为捕获由卫生洁具的表面反射的光(该光被屏幕55投射到该卫生洁具的表面上),以便通过偏转测量分析检测表面反射缺陷。第一屏幕摄像机43和第二屏幕摄像机44优选定位在屏幕的边缘(例如,在顶部边缘和底部边缘,或在侧向边缘),具有会聚的视轴。
[0113]
优选地,第一组的摄像机41a、(41a’)、42a、(42a’)具有会聚的视轴。
[0114]
优选地,第二组的摄像机42a、42b、42c和42d具有会聚的视轴。
[0115]
优选地,中央照明器51和侧向照明器52a、52b、52c、53a、53b、53c具有会聚的照射方向。
[0116]
在一个实施方式中,第一组的摄像机41a、(41a’)、42a、(42a’)、第二组的摄像机42a、42b、42c和42d、中央照明器51和侧向照明器52a、52b、52c、53a、53b、53c具有该卫生洁具6的会聚照射方向(以会聚在表面或表面的一部分上)。
[0117]
在一个实施方式中,多个照明器还包括被配置为发射彩色光(例如,红色)的第一照明器54a和第二照明器54b。更具体而言,第一照明器54a和第二照明器54b被配置为发射闪光(或间歇光)。
[0118]
设备1包括控制单元7。
[0119]
在一个实施方式中,控制单元7被配置为接收表示被检查的卫生洁具6的类型(例如,品牌和型号)的输入数据。
[0120]
在一个实施方式中,控制单元7可以访问包含参考数据81的数据库8。在一个实施方式中,控制单元7被配置为获取参考数据81。在一个实施方式中,控制单元7被配置为根据输入数据查询数据库。
[0121]
在一个实施方式中,参考数据81包括为了检查卫生洁具6机械臂3所采用的一个或多个操作位置。
[0122]
控制单元7被配置为根据参考数据81驱动旋转平台22(卫生洁具6搁置在其上)和机械臂3。更具体而言,控制单元7被配置为以协调的方式驱动以下致动器中的一个或多个:旋转平台22的旋转致动器23、机械臂3的第一致动器371、机械臂3的第二致动器372、机械臂3的第三致动器373、机械臂3的第四致动器374、机械臂3的第五致动器375。
[0123]
控制单元7被配置为启用第一组摄像机41a、(41a’)、41b、(41b’)中的一个或多个摄像机以捕获卫生洁具6的图像4(在一个实施方式中,三维图像)。在一个实施方式中,控制单元7被配置为驱动机械臂3通过一系列第一操作位置,在该一系列第一操作位置,第一组摄像机41a、(41a’)、41b、(41b’)捕获卫生洁具6的图像4。在一个实施方式中,一系列第一操作位置是预定的。
[0124]
在一个实施方式中,一系列第一操作位置随输入数据而变。在一个实施方式中,控制单元被配置为启用多个照明器51、52a、52b、52c、53a、53b、53c中的一个或多个照明器。
[0125]
在一个实施方式中,控制单元7被配置为根据捕获的三维图像重构卫生洁具6的三维渲染70。
[0126]
在一个实施方式中,控制单元7被配置为在卫生洁具6的三维渲染70中识别可见区域71、半隐藏区域72和隐藏区域73。
[0127]
在一个实施方式中,控制单元7被配置为将三维渲染70和/或捕获的图像4与对应的参考图像(形成参考数据81的一部分)进行比较,以检测它们之间的任何差异(在维度上和/或在表面上)。在一个实施方式中,控制单元7被配置为根据三维渲染70和/或捕获的图像4与参考图像之间的比较来识别关键区域,并且根据参考公差(形成参考数据81的一部分)识别参考图像。更具体而言,控制单元7被配置为从三维渲染70和/或捕获的图像4中提取图像参数,并将它们与(参考图像的)参考图像参数进行比较。
[0128]
在一个实施方式中,控制单元7被配置为根据比较来识别关键区域。如果在比较期间评估的至少一个图像参数与对应的参考图像参数相差的量大于参考公差,则认为该区域
是关键的。
[0129]
特别地,如果捕获的图像4和/或三维渲染70位于隐藏区域73中,则使用第一参考公差评估它们与参考图像之间的任何差异,如果它们位于半隐藏区域72中,则使用第二参考公差评估它们与参考图像之间的任何差异,如果它们位于可见区域71中,则使用第三参考公差评估它们与参考图像之间的任何差异。第一参考公差大于第二参考公差。第二参考公差大于第三公差。
[0130]
在一个实施方式中,控制单元被配置为驱动机械臂3通过一系列第二操作位置,并且在一系列第二操作位置中的每个操作位置处,启用第二组摄像机42a、42b、42c、42d中的一个或多个摄像机和多个照明器51、52a、52b、52c、53a、53b、53c中的一个或多个照明器。一系列第二操作位置使得第二组摄像机42a、42b、42c、42d捕获所识别的一个或多个关键区域的图像4。
[0131]
在一个实施方式中,控制单元7被配置为将第二组摄像机42a、42b、42c、42d捕获的图像4与参考数据81进行比较。
[0132]
在一个实施方式中,控制单元7被配置为根据第二组摄像机42a、42b、42c、42d捕获的图像4来更新三维渲染70。
[0133]
在一个实施方式中,控制单元7被配置为将更新的三维渲染70与参考数据81进行比较。
[0134]
控制单元7被配置为提供有关卫生洁具6的缺陷的诊断信息9。
[0135]
设备1包括被配置为使诊断信息9对用户可用的界面。
[0136]
在一个实施方式中,诊断信息9由更新的三维渲染70限定。实际上,通过在界面上显示三维渲染70,用户可以查看卫生洁具6上的缺陷。
[0137]
在一个实施方式中,诊断信息包括图形符号(例如,箭头或点)以指示三维渲染70上的缺陷。在一个实施方式中,用户界面然后允许用户详细查看缺陷。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1