精确拉曼光谱法的制作方法
精确拉曼光谱法
1.交叉引证
2.本技术主张2020年1月16日提交的美国临时专利号62/961,721的优先权,该专利全部并入本文中。
背景技术:
3.拉曼光谱法是一确立之技术,其中广泛之文献描述了其针对各种材料性质之特性化的用途。
4.拉曼光谱携载关于样本之各种性质的信息。最值得注意地,光谱中之不同峰对应于不同材料。当测量之目标由材料化合物(例如,sige)组成时,拉曼光谱中之具体峰将对应于不同原子对(例如,si-si、si-ge及ge-ge)。
5.用于自此等峰之位置提取关于浓度及应力之信息的方法在文献中系熟知的。举例而言,使三个sige峰之位置与锗组成及层应力有关的一方程组在以下公开中提出:t.s.perov等人的composition and strain in thin sii-xgex virtual substrates measured by micro-raman spectroscopy and x-ray diffraction,j.app.phys.109,033502(2011)。
6.掺杂为影响拉曼光谱之另一特性。自掺杂剂分布引起之载剂浓度影响拉曼讯号,且造成拉曼峰之额外移位。掺杂之等级可因此并入至拟合程序内,且经由监视峰位置,掺杂等级连同应力及组成之同时评价系可能的(参见例如,a.perez-rodriguez等人的effect of stress and composition on the raman spectra of etch-stop sigeb layers,j.appl.phys.80,15(1996))。
7.产生拉曼光谱的目前最佳技术之实例提供于barak等人的pct专利申请公开号wo2017/103934及barak等人的pct专利申请公开号wo2017/103935中,两个申请以引用的方式并入本文中。
8.拉曼光谱非常弱,且归因于此弱性,必须汇集同样多的传送辐射之拉曼光谱。
技术实现要素:
9.可提供一种用于精确的拉曼光谱法的系统、方法及存储指令的非暂时性计算机可读介质。
附图说明
10.为了理解本发明及看到其可在实务上进行之方式,现将参看随附图式,仅通过非限制性实例来描述一较佳实施例。
11.图1示出一照明点、一对准之撞击束之强度分布、一不对准(misalignment)之撞击束之强度分布及感兴趣区之一实例。
12.图2示出一传感器、一空间滤波器、一感兴趣区及一撞击点。
13.图3示出一感兴趣区之间的九个空间关系。
14.图4是一光学测量系统之一实例。
15.图5是一光学测量系统之一实例。
16.图6是一光学测量系统之一实例。
17.图7是一光学测量系统之一实例。
18.图8示出一或多个旋转楔形棱镜及一楔形棱镜旋转器之实例。
19.图9示出照明光学器件之一些元件之一实例。
20.图10示出一方法之一实例。
21.图11示出一方法之一实例。
22.图12示出一方法之一实例。
23.图13示出一垫之照明之一实例。
24.图14示出规则及不规则区域之照明之一实例。
具体实施方式
25.在以下详细描述中,阐述众多具体细节以便提供对本发明之透彻理解。然而,熟习此项技术者应理解,本发明可在无此等具体细节之情况下实践。在其他实例中,尚未详细描述熟知方法、程序及组件,以便不使本发明晦涩难懂。
26.看作本发明之标的经在说明书之总结部分中特定指出且作出截然不同的主张。然而,关于组织及操作方法两者,当藉随附图式来阅读时,本发明连同其目标、特征及优势一起可通过参考以下详细描述来最佳地理解。
27.应了解,为了说明之简单且清晰,图中显示之元件尚无必要按比例绘制。举例而言,为了清晰起见,元件中之一些之尺寸可相对于其他元件夸示。另外,在考虑为适当之情况下,可在该等图间重复参考数字以指示对应或类似元件。
28.说明书中对系统、方法及非暂时性计算机可读介质中之任一者之任何参考应作必要的修正而适用于该系统、方法及非暂时性计算机可读介质中之任一其他者。举例而言,对一系统之任何参考应作必要的修正而适用于可由该系统执行的方法及适用于可存储可由该系统执行之指令的非暂时性计算机可读介质。
29.因为,针对多数部分,本发明之说明的至少一个实施例可使用熟习此项技术者已知之电子组件及电路来实施,为了理解及了解本发明之基础概念且为了不自本发明之教示混淆或模糊,所以将不会以比如上说明考虑为必要更大之任何程度来解释细节。
30.以下说明之任何数或值应被视为一非限制性实例。
31.已发现,当样本包括结构元件时,该等结构元件中之一些(尤其不规则(非周期性、边缘状等)结构元件)具有辐射的照明可使该结构元件绕射辐射,且绕射之辐射又可产生使拉曼光谱“失真(distorts)”之“寄生(parasitic)”拉曼散射(一旦由拉曼光谱仪之检测器感测到)。“寄生”拉曼散射辐射可例如改变一或多个拉曼光谱峰之位置及形状及类似者。
32.失真的拉曼光谱之分析可导致关于样本之材料、样本之应变之不精确结构,及与样本之其他性质有关的不精确性。
33.存在改良拉曼光谱法之精确性的增长之需求,且尤其,为了半导体制造过程控制之目的减少拉曼光谱之失真之需求。
34.拉曼光谱法可用于半导体晶圆制造apc、对晶圆之经图案结构测量、晶粒中测量及
类似者中。
35.可提供一种用于精确的拉曼光谱法的系统、方法及存储指令的非暂时性计算机可读介质。
36.撞击束系自样本之经照明区域发射,且撞击空间滤波器。经照明区域系由照明辐射束(下文称为“照明束”)照明。
37.拉曼光谱法之精确性系通过防止来自样本的不当散射之辐射到达检测器而增加。此可通过提供用于阻挡落在感兴趣区(感兴趣区由空间滤波器界定)外的一撞击辐射束(下文称为“撞击束”)之一或多个部分来进行,由此防止撞击束之此等一或多个部分到达检测器。
38.当照明点“覆盖”不规则区域时,可需要空间滤光。不规则区域可使照明点失真,及/或可产生拉曼光谱之新散射源,及/或可包括元件的非周期性配置,及/或可包括元件的非均质配置。不规则区域的非限制性实例包括(a)覆盖导体之边缘区及边缘区附近之光点,在该光点处,边缘区具有该光点之区域之相同阶(例如,在0.1与0.9之间),(b)覆盖单一导体之边缘区且亦覆盖该边缘区之光点,在该光点处,附近包括粉砂。
39.在对包括诸如以下之元件的结构之测量期间应用空间滤波器:硅穿孔(through silicon via;tsv)、浅槽隔离(shallow trench isolation;sti)(例如,填充或/与门极氧化物)、三维反及(nand)内存(three dimensional nand;3d-nand)(例如,应变压型、结晶度及尺寸压型)及类似者。
40.空间滤波器可包括可界定不同感兴趣区之一可调整空间滤波器。另外或替代地,该空间滤波器可展现可控制透明度,及/或可界定由不透明区包围之一透明感兴趣区。该可调整滤波器可由相互按其空间滤光性质不同之一组空间滤波器替换。
41.该空间滤波器可包括界定一固定感兴趣区之固定元件。
42.该空间滤波器可用于系统之一些操作模式中,且可在系统之其他操作模式中移除或不利用。
43.该感兴趣区可比撞击束之相关横截面小(且甚至小得多)。撞击束之相关横截面为在空间滤波器之平面处形成的横截面。
44.举例而言,该感兴趣区可为撞击束之相关横截面的一部分。举例而言,该感兴趣区可小于撞击束之相关横截面的1%、2%、5%、10%、15%、20%或30%。
45.经照明区域及撞击束之相关横截面可具有相同尺寸,可具有相同形状,可相互按尺寸而不同,及/或可相互按形状而不同。
46.此等形状的非限制性实例系矩阵光点、椭圆形光点、圆形光点、照明线及类似者。
47.感兴趣区可经界定以防止散射之辐射到达检测器。感兴趣区之界定可使用模拟、实际测量及类似者来执行。
48.小感兴趣区提供一精确且高度敏感性光学测量系统,该系统可用以评估不同样本,及/或评估此等样本之不同区域,包括但不限于,结构元件之密集数组、展现潜在应变元件之区、展现陡坡及/或实质高度改变之区、周边区域、测量硅穿孔、易失存储器之闸极氧化物、三维nand内存单元、易失存储器之后cmp区域及类似者。
49.归因于感兴趣区之紧凑性,感兴趣区与撞击束之间的甚至微小不对准可使系统阻挡撞击束中之一些、多数及甚至所有。
50.当撞击束之中心在感兴趣区内时,尤其当撞击束之中心位于感兴趣区之中间时,可将撞击束视为与感兴趣区对准。
51.不对准可自系统不精确性、温度改变、振动及类似者产生。
52.在给定拉曼光谱系自相对弱讯号形成之事实之情况下,不对准之效应可非常显著。
53.因此,该系统、该方法及该非暂时性计算机可读介质经配置以补偿此不对准。
54.补偿可涉及光学对准(或实质上光学对准)感兴趣区与撞击束。此可通过控制撞击束在空间滤波器上之撞击之位置来进行。
55.控制可包含诱发光学汇集路径之改变,诸如,改变撞击束之传播方向。
56.补偿可基于与由检测器检测到之辐射有关的回馈。该回馈可在校准过程期间或在任一其他时间点期间提供。
57.校准过程可连续、以非连续方式、匆忙地、以迭代方式(iterative manner)及类似者执行。
58.校准过程可基于由检测器检测到的辐射之强度(在穿过空间滤波器后)。
59.校准过程可基于不同于由检测器检测到的辐射之强度之信息(或除了该辐射之强度之外,亦基于其他信息)。
60.校准过程可基于由检测器感测之拉曼光谱。
61.为了解释简单起见,以下实例中之一些参考迭代过程,其中校准过程后跟着为测量过程。在测量过程期间测量样本。
62.在校准过程期间,使用不同照明路径配置来将目标照明,该等照明路径配置将汇集之辐射引导至空间滤波器上之不同位置以提供不同测试结果。
63.选择该等测试结构中之一者(例如,具有最高总强度之测试结果),且在跟在校准过程后之一或多个测量过程期间可使用提供选定测试结果的照明路径配置。替代地,可选择多个测试结果,且可选择为多个测试结果之函数(例如,加权平均值)的照明路径配置。
64.当执行校准过程之多个迭代时,在连续校准过程之间存在时序间隙。连续校准过程之间的时序间隙可为固定的或可随时间而变化。
65.可基于诸如以下之一事件而触发校准过程:测量失败、一或多个拉曼光谱中的误差之检测、某些温度改变之检测、某些温度之检测、某些振动之检测、一或多个测量之拉曼光谱自期望拉曼光谱的偏差之出现及类似者。
66.当系统之照明路径包括不同辐射源时,则可每辐射源或该等辐射源中之每一些执行校准过程。此校准过程可补偿与不同辐射源有关之机械及/或光学不对准,且可实现使用不太精确照明及/或汇集路径,此可简化系统且甚至可减少系统之成本。
67.图1示出一照明点20、一对准之撞击束之强度分布21、一不对准之撞击束之强度分布22及感兴趣区225之一实例。
68.在图1中,假定将照明点20成像至空间滤波器上。
69.图1示出自感兴趣区225与撞击束之间的不对准产生的强度差(29)。
70.图1亦示出样本300之一部分,及在样本上的感兴趣区之图像225'。
71.图2示出一感测器224、一空间滤波器223、一感兴趣区225及由在空间滤波器上之撞击束形成之一撞击点26。
72.感兴趣区225尺寸可变,且可比撞击点小得多。
73.图3示出在光学测量系统之九个不同配置下的感兴趣区227与撞击点26之间的九个空间关系291至299。六个配置提供最佳重迭,且因此,可将其选择为待在接下来的测量过程期间应用的光学测量系统之所要的配置。
74.应注意,在补偿过程期间,空间滤波器可允许辐射穿过测试感兴趣区,该测试感兴趣区可比在测量过程期间使用之感兴趣区大。
75.图4是一光学测量系统200之一实例。
76.光学测量单元200包括一照明路径、一汇集路径、一控制单元,及用于支撑样本300且用于相对于汇集及照明路径移动样本300之一机械移动单元303。应注意,样本300可为静态的,而照明及/或汇集路径可移动。应注意,样本300及汇集及/或照明中之至少一个路径可相对于彼此移动。
77.在图4中,汇集路径与照明路径共享一物镜213,及一半波长板(half wavelength plate;hwp)109。应注意,照明路径与汇集路径可共享多个组件,可共享其他组件,或可不共享任一组件。
78.在图4中,照明角度及汇集角度垂直于样本。应注意,可提供任何其他照明角度及/或汇集角度。
79.照明路径经配置以控制照明束之各种参数,诸如但不限于,偏光、频谱、形状、尺寸、相干性、路径、强度及类似者。在图中示出之各种元件辅助该等参数之控制。控制偏光之元件被称作偏光控制元件。控制光束之其他参数之元件被称作额外控制元件。应注意,单一元件可控制光束之一或多个参数。元件的非限制性实例包括偏光器、半波板、四分之一波板、分析器、透镜、光栅、光圈及类似者。
80.汇集路径经配置以控制撞击束之各种参数,诸如但不限于,偏光、频谱、形状、尺寸、相干性、路径、强度及类似者。在图中示出之各种元件辅助该等参数之控制。
81.将照明路径示出为包括(a)激光102,(b)照明光学器件103,其包括照明偏光控制元件103(1)及额外照明控制元件103(2),(c)分光镜,诸如,二色分光镜210,(d)hwp 209,及(e)物镜213。额外照明控制元件可控制与偏光不同之一或多个参数,例如,形状、尺寸、传播角度及类似者。
82.将汇集路径示出为包括(a)分光镜,诸如,二色分光镜210,(b)hwp209,(c)物镜213,(d)汇集光学器件105,其包括用于改变汇集路径由此补偿不对准之可调整光学器件105(1)、额外汇集控制元件105(2)及汇集偏光控制元件105(3),(e)空间滤波器223,及(f)光学单元235,其包括一光栅231、用于将穿过感兴趣区之辐射引导至光栅231上之第一透镜232、用于将来自光栅231之光朝向检测器224引起之第二透镜。
83.在光栅231与至少第二透镜233之间的空间关系可更改以将来自光栅231之不同辐射波瓣朝向第二透镜233引导之意义上,光学单元235系可配置的。图4示出一旋转单元238,其可相对于第一及第二透镜旋转光栅231。不同于旋转之移动可用来改变光学单元235之元件之间的空间关系。
84.检测器224经配置以产生拉曼光谱。检测器224耦接至控制单元225,该控制单元经配置以控制光学测量系统之各种组件/单元/元件,且可经配置以控制校准过程。
85.图5是一光学测量系统200'之一实例。
86.测量系统200'与测量单元200不同之处在于,(a)不包括hwp 209,(b)包括多个激光102',及(c)包括用于处理检测讯号之一处理单元234。照明光学器件103可经配置以组合或选择来自多个激光之辐射。在一些情况中,一次可仅启动一个激光。
87.图6是一光学测量系统200”之一实例。
88.测量系统200”与测量单元200不同之处在于,(a)不包括hwp 209,及(b)包括多个激光102'。照明光学器件103可经配置以组合或选择来自多个激光之辐射。在一些情况中,一次可仅启动一个激光。
89.图7示出一光学测量系统201之一实例。
90.系统201包括一照明路径,其包括激光201、入口孔径光阑203、镜子204、第一照明透镜206、照明场光阑207、第二照明透镜208、照明偏光器209、分光镜210、诸如旋转hwp 211之hwp、物镜孔径光阑/后焦面212及物镜213。
91.汇集路径包括物镜213、物镜孔径光阑/后焦面212、样本300、旋转汇集偏光器215、诸如旋转hwp 211之hwp、第一汇集透镜216、汇集孔径光阑217、第二汇集透镜218、陷波滤波器219、汇集场光阑220、旋转楔形棱镜221、楔形棱镜旋转器225、狭缝透镜222、空间滤波器223(可为可打开或闭合之狭缝,打开狭缝之尺寸及/或形状可固定或可调整)、光学单元235及检测器234。
92.检测器234可为摄谱仪。
93.图8示出旋转楔形棱镜221、包围旋转楔形棱镜221之楔形棱镜旋转器225、进入旋转楔形棱镜221之一输入光束281及自旋转楔形棱镜221输出之一输出光束282。
94.图8亦示出在给定旋转楔形棱镜221之不同旋转位置之情况下的一输出光束之多个路径。
95.图8亦示出该系统可包括提供多个选项以引导输出光束之一对旋转楔形棱镜221及221'。输出光束穿过两个旋转棱镜。
96.图9示出照明光学器件之一些元件之一实例。存在三个激光,跟着为照明路径之三个区段,以用于添加来自三个激光之辐射的一光学添加器结尾。
97.三个激光(例如,红、蓝及绿激光)102(1)1至102(3)后跟着为照明路径之三个区段。照明路径之三个区段包括三个准直器109(1,1)至109(1,3)、三个隔离器109(2,1)至109(2,3)、三个清除滤波器109(3,1)至109(3,3)及三个快门109(4,1)至109(4,3)。
98.三个区段后跟着为一组合器,其包括三个分光镜,诸如,二色分光镜109(5,1)至109(5,3),组合器后跟着为初始镜109(5)、柱面透镜109(6)及副镜204。
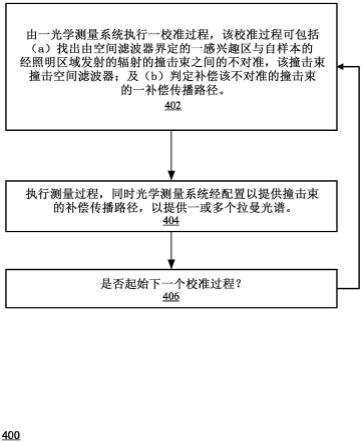
99.图10示出一方法400之一实例。
100.方法400可开始于步骤402,由一光学测量系统执行一校准过程,该校准过程可包括(a)找出由空间滤波器界定的一感兴趣区与自样本的经照明区域发射的辐射的撞击束之间的不对准,该撞击束撞击空间滤波器;及(b)判定补偿该不对准的撞击束的一补偿传播路径。
101.该感兴趣区经成形及定尺寸以阻挡来自经照明区域之散射辐射到达检测器。
102.步骤402可包括分析至少一个拉曼光谱。另外或替代地,步骤402可包括按与拉曼光谱之频率不同的频率来分析辐射。步骤402之两个样本之间的差可包含旋转位于汇集路径中之一光栅。
103.步骤402后可跟着为步骤404,执行测量过程,同时光学测量系统经配置以提供撞击束的补偿传播路径,以提供一或多个拉曼光谱。
104.步骤404后可跟着为步骤406,判定是否起始步骤402及404的下一个迭代,且如是,则跳至步骤402。
105.图11示出一方法401之一实例。
106.方法401可开始于执行校准过程的步骤403,其通过使用将撞击束引导至空间滤波器上的不同位置的不同光学测量系统配置来照明一目标,感测穿过感兴趣区的辐射以提供不同测试结果,及基于测试结果判定撞击束的一补偿传播路径。
107.该感兴趣区可经成形及定尺寸以阻挡来自经照明区域之散射辐射到达检测器。
108.步骤403可包括选择测试结果中之一者以提供一选定测试结果,及基于选定测试结果判定撞击束之补偿传播路径。
109.步骤403可包括选择测试结果中最高强度之一测试结果,以提供选定测试结果。
110.应注意,判定可包括通过选择多个选定测试结果及基于多个选定测试结果判定路径(例如,使用内插、外推或任一其他方法)来判定补偿路径。
111.步骤403可包括旋转光学测量系统之一楔形棱镜,以找出楔形棱镜之定向,该楔形棱镜一旦经应用,则将引导撞击束穿过撞击束之补偿传播路径。
112.步骤403可包括旋转光学测量系统之多个楔形棱镜,以找出多个楔形棱镜之定向之组合,该等多个楔形棱镜一旦经应用,则将引导撞击束穿过撞击束之补偿传播路径。
113.步骤403可包括分析至少一个拉曼光谱。另外或替代地,步骤403可包括按与拉曼光谱之频率不同的频率来分析辐射。步骤404之两个样本之间的差可包含旋转位于汇集路径中之一光栅。
114.步骤403后可跟着为执行测量过程之步骤404,同时光学测量系统经配置以提供撞击束之补偿传播路径,以提供一或多个拉曼光谱。
115.步骤404后可跟着为步骤406,判定是否起始步骤402及404之下一个迭代,且如是,则跳至步骤402。
116.图12示出用于选择性拉曼光谱法的方法500。
117.方法500可包括接收或产生关于样本的不规则区域的位置的不规则区域信息之步骤510。
118.步骤510后可跟着为步骤520,基于该不规则区域信息判定在拉曼检测器前应用的一空间滤光过程的至少一个过滤参数。
119.步骤520可包括判定在拉曼检测器前的一滤波器之空间配置。
120.步骤520可包括自相互按至少一个过滤参数中的至少一者不同的多个滤波器选择在拉曼检测器前的一滤波器(或调整狭缝开口/宽度)。
121.该至少一个过滤参数可包括到达拉曼检测器之光量,其中当照明一不规则区域时到达拉曼检测器之光量低于当照明一规则区域时到达拉曼检测器之光量。
122.该至少一个过滤参数可包括在拉曼检测器前之一滤波器中形成的一开口之面积,其中当照明一不规则区域时在滤波器中形成的开口之面积小于当照明一规则区域时在滤波器中形成的开口之面积。
123.该至少一个过滤参数可包括在拉曼检测器前之一滤波器中形成的一开口之形状,
其中当照明一不规则区域时在滤波器中形成的开口比当照明一规则区域时在滤波器中形成的开口窄。
124.当(a)一规则区域之一规则元件的形成于在拉曼检测器前之一滤波器上的一图像比(b)一不规则区域之一不规则元件的形成于在该滤波器上的一图像窄时,则将形成于滤波器中的一开口之宽度设定为比不规则元件之图像之宽度细。
125.步骤520可包括设定开口之宽度以超过不规则元件之图像之宽度。
126.步骤520后可跟着为步骤530,在应用过滤参数时获取样本的多个位点的拉曼光谱。
127.步骤530可包括应用当照明不规则区域时拟合不规则区域的至少一个过滤参数,及应用当照明规则区域时拟合规则区域之至少一个过滤参数。
128.可提供一种方法,其包括接收或判定过滤参数,及应用当照明不规则区域时拟合不规则区域之至少一个过滤参数,及应用当照明规则区域时拟合规则区域之至少一个过滤参数。
129.图13示出一垫602及垫附近604之照明之一实例。
130.垫602及其附近604由形成椭圆光点之一扫描辐射束照明。光点614仅照明该附近,且光点610仅照明垫。光点610及614照明规则区域,且在校正期间应用与规则区域有关之至少一个过滤参数。
131.光点612照明垫之边缘,且落在垫及其附近两者上。光点照明不规则区域,且在校正期间应用与不规则区域有关之至少一个过滤参数。
132.图13亦示出在具有一大开口632(与规则区域有关的至少一个过滤参数)的一滤波器上的光点610的一图像622。
133.图13进一步示出在具有一窄开口630(与不规则区域有关的至少一个过滤参数)的一滤波器上的光点612的图像620。
134.窄开口630可比图像620窄,但可比图像622宽(或大约相等)。
135.图14示出规则及不规则区域之照明之一实例。
136.当照明规则区域730时,光点730不扭曲。
137.当照明不规则区域(诸如,导通体732之边缘区及其附近导通体附近733)或照明导通体之包括一狭缝734的附近时,光点731扭曲。
138.应注意,辐射之分析及/或自检测器之检测讯号的拉曼光谱之产生及/或分析拉曼光谱以判定对象之特征可至少部分由不属于光学测量系统及/或可在距照明及/或汇集路径远程定位之一控制器及/或一处理电路执行。
139.达成相同功能性的组件之任何配置有效地“相关联”,使得达成所要的功能性。因此,本文中组合以达成一特定功能性之任何两个组件可看作彼此“相关联”,使得与架构或中间组件无关,达成所要的功能性。同样地,如此关联之任何两个组件亦可被看作彼此“可操作地连接”或“可操作地耦接”,以达成所要的功能性。
140.此外,熟习此项技术者将认识到,以上描述之操作之间的界线仅为说明性。可将多个操作组合成一单一操作;一单一操作可分布于额外操作中,且可在时间上至少部分重迭地执行操作。此外,替代实施例可包括一操作之多个实例,且在各种其他实施例中,可更改操作之次序。
141.又举例而言,在一个实施例中,说明之实例可实施为位于单一集成电路上或同一装置内之电路系统。替代地,该等实例可实施为以一合适方式相互互连之任何数目个单独的集成电路或单独装置。
142.又举例而言,该等实例或其部分可实施为实体电路系统之软或程序码表示,或可转换成实体电路系统(诸如,以任一适当类型之一硬件描述语言)的逻辑表示。
143.然而,其他修改、变化及替代亦系可能的。因此,应按说明性意义而非按限制性意义来看待说明书及图式。
144.在申请专利范围中,置放于括号之间的任何参考标号不应被解释为限制申请专利范围。词语“包含”不排除与申请专利范围中列出之元件或步骤不同的元件或步骤之存在。此外,将如本文中使用之术语“一(a或an)”定义为一个或多于一个。又,诸如“至少一个”及“一或多个”之介绍性词组在申请专利范围中之使用不应被解释为暗示通过不定冠词“a”或“an”对另一申请专利范围要素之介绍将含有此介绍之申请专利范围要素的任一特定申请专利范围限制于仅含有一个此要素之发明,甚至当同一申请专利范围包括介绍性词组“一或多个”或“至少一个”及诸如“a”或“an”之不定冠词时。同理适用于定冠词之使用。除非另有陈述,否则诸如“第一”及“第二”之术语用来任意地区别此等术语描述之要素。因此,此等术语未必意欲指示此等要素之时间或其他优选化。某些措施在相互不同之申请专利范围中列举之仅有实情并不指示此等措施之组合不能有利地使用。
145.虽然本文中已说明及描述本发明之某些特征,但许多修改、取代、改变及等效内容现在将由一般熟习此项技术者想到。因此,应理解,所附申请专利范围意欲涵盖如属于本发明之真实精神之所有此等修改及改变。
146.术语“包括”、“包含”、“具有”、“组成”与“基本上由
……
组成”系以可互换方式使用。举例而言,任一方法可至少包括在该等图中及/或在说明书中包括之步骤,仅包括在该等图及/或说明书中包括之步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1