基于可控交通流的自动驾驶测试系统及方法与流程
1.本发明涉及自动驾驶汽车测试系统。更具体地说,本发明涉及一种用于自动驾驶测试模拟交通流底盘控制的测试系统及方法。
背景技术:
2.自动驾驶测试是通过在环境中搭建不同的测试场景来模拟现实交通真实环境,交通流包括机动非机动车和行人,如果用真人和真车去做测试,不能完全保证不会发生事故,存在较大的风险,因此需要模拟交通流底盘加载不同的测试交通流类型来模拟机动车、非机动车和行人的行为,减少了事故的发生率;同时,当前自动驾驶车辆测试还是处于定性测试,不能通过指标来量化测试过程和测试内容,因此通过定量化测试解决自动驾驶测试中标准化测试场景的需求是十分必要的。
技术实现要素:
3.本发明的一个目的是解决至少上述问题,并提供至少后面将说明的优点。
4.本发明还有一个目的是提供一种用于自动驾驶测试模拟交通流底盘控制的测试系统及方法,其能够通过模拟不同的交通流,搭建标准化测试场景,满足自动驾驶车辆定量化测试要求,提高自动驾驶车辆测试的全面性和可靠性。
5.为了实现根据本发明的这些目的和其它优点,提供了一种基于可控交通流的自动驾驶测试系统,包括:
6.自动驾驶测试车辆,其包括通讯模块iv,其获取并发送车辆的行驶数据;
7.模拟交通流底盘,其以工具的形式附着于车辆底盘以模拟交通流,所述模拟交通流底盘包括通讯模块v、通讯模块vi,所述通讯模块vi获取并发送模拟交通流底盘的行驶状态数据;
8.控制平台,其包括服务器端单元、客户端单元,所述服务器端单元包括场景设计模块,所述客户端单元包括场景预案模块、串口通讯模块、数据解析模块、实时计算模块、指令处理模块,所述场景设计模块设定标准化测试场景及参数并存入所述场景预案模块,所述串口通讯模块包括通讯模块vii、通讯模块viii、通讯模块ix,所述通讯模块vii将接收到的车辆的行驶数据输出,所述通讯模块ix将接收到的模拟交通流底盘的行驶状态数据输出;
9.测试时,所述场景预案模块将某一测试场景的参数发送至所述实时计算模块,所述数据解析模块将接收到的车辆的行驶数据、模拟交通流底盘的行驶状态数据解析并发送至所述实时计算模块,所述实时计算模块计算得到代表指令的结果数据并发送给指令处理模块,所述指令处理模块通过所述通讯模块viii发送至所述通讯模块v,以控制模拟交通流底盘执行指令。
10.优选的是,所述客户端单元还包括数据存储模块、数据转发模块,所述服务器端单元还包括实时展示模块,所述数据存储模块将接收到的车辆的行驶数据、模拟交通流底盘的行驶状态数据存储并通过所述数据转发模块发送至所述实时展示模块进行可视化展示。
11.优选的是,所述服务器端单元还包括数据处理模块,所述数据存储模块存储接收到的车辆的行驶数据、模拟交通流底盘的行驶状态数据并通过所述数据处理模块导入和导出。
12.优选的是,所述服务器端单元还包括远程操作模块,所述实时计算模块计算得到结果数据通过所述远程操作模块发送给指令处理模块。
13.优选的是,所述服务器端单元包括系统日志模块,记录测试场景开始、执行、结束的时间戳不同数据的对齐。
14.优选的是,车辆的行驶数据包括车辆的速度、位置、加速度和航向角,模拟交通流底盘的行驶状态数据包括模拟交通流底盘的速度、位置、加速度和航向角。
15.本发明还提供了基于可控交通流的自动驾驶测试,应用所述的测试系统,包括:
16.步骤1、于车辆底盘附着一工具,以模拟交通流;
17.步骤2、设定标准化测试场景及相应参数;
18.步骤3、择一测试场景并发送相应参数,同时获取并发送车辆的行驶数据以及模拟交通流底盘的行驶状态数据;
19.步骤4、解析数据、计算,根据计算结果控制模拟交通流底盘执行启动、停止或复位。
20.本发明还提供了电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行所述的方法。
21.本发明还提供了存储介质,其上存储有计算机程序,该程序被处理器执行时,实现所述的方法。
22.本发明至少包括以下有益效果:
23.本发明能够满足自动驾驶车辆不同测试场景的定量化测试,且具有结构简单、成本低的优点,用于帮助自动驾驶车辆开展标准化测试场景的测试,后期结果分析可用于自动驾驶系统针对具体场景通过率和存在问题的分析,以提高自动驾驶系统的安全性与可靠性,最大程度地减少对人员的伤害或对车的损害。
24.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
25.图1为本发明的一种技术方案的示意图;
26.图2为本发明一种技术方案的通讯示意图;
27.图3为本发明一种技术方案的结构示意图;
28.图4为本发明一种技术方案的控制平台的通讯示意图;
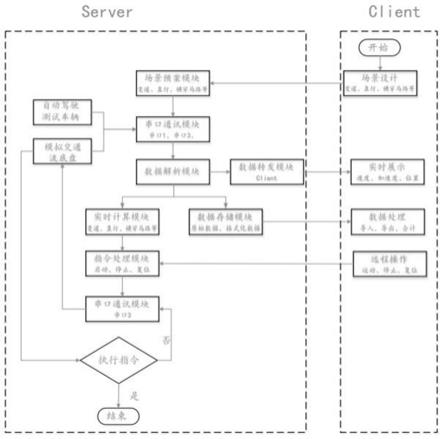
29.图5为本发明一种技术方案的工作流程图;
30.图6为行人从停靠车辆后方横穿场景实例的示意图;
31.图7为非机动车穿行场景的实例示意图;
32.图8为非机动车穿行
‑
遮挡场景的实例示意图;
33.图9为路口左转遇左侧垂直车道人行横道行人场景的实例示意图;
34.图10为路口右转遇右侧垂直车道人行横道行人场景的实例示意图;
35.图11为前方车辆急刹场景的实例示意图;
36.图12为跟车时前方车辆切出场景的实例示意图;
37.图13为一个具体实例的计算示意图;
38.图14为图13的实例的高斯投影正算公式示意;
39.图15为一种可视化的效果示意图;
40.图16为一种可视化的效果示意图;
41.图17为一种可视化的效果示意图;。
具体实施方式
42.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
43.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不配出一个或多个其它元件或其组合的存在或添加。
44.需要说明的是,下述实施方案中所述实验方法,如无特殊说明,均为常规方法,所述试剂和材料,如无特殊说明,均可从商业途径获得。
45.如图1
‑
5所示,本发明提供一种基于可控交通流的自动驾驶测试系统,包括:
46.自动驾驶测试车辆,其包括通讯模块iv,集成通讯、定位gps、获取差分数据的功能,其获取并发送车辆的行驶数据,包括但不限于车辆的速度、位置、加速度和航向角,通过433通讯协议输出数据,例如time,longitude,latitude,speed,pitch,roll,heading,accx,accy,accz,ve,vn,vu,altitude,对应为1520386690230,116.1204714,40.0954823,0.01,0.3,
‑
1.7,166.1,0.03,0.00,1.00,
‑
0.01,0.01,0.00,23.2;
47.模拟交通流底盘,其以工具的形式附着于车辆底盘以模拟交通流,工具为假的人、车,拖动移动模拟行走,模拟行为轨迹,所述模拟交通流底盘包括通讯模块v、通讯模块vi,集成通讯、定位gps、获取差分数据的功能,所述通讯模块vi获取并发送模拟交通流底盘的行驶状态数据,包括但不限于车辆的速度、位置、加速度和航向角,例如time,park_status,back_status,light_status,braking_info,steering_info,accelerator_info,horn_info,wiper,driving_mode,takeover_mode,faultcode,对应为1520386690230,0,0,25,
‑
50,1160.2,60,0,0,0,1,0,通过433通讯协议输出数据,433用于测试数传输、计算、指令下发与车端状况反馈;2.4g用于模拟交通流底盘,自动驾驶车辆上惯导设备获取差分数据;
48.控制平台,其包括服务器端单元client、客户端单元server,server和client之间通过websocket通讯协议来传输数据,并通过webapi调用存储在数据库中的数据,所述服务器端单元包括场景设计模块,选择要测试的场景,例如变道、直线、横穿马路等场景,并设置相关技术参数包括速度、加速度、距离和位置等参数;所述客户端单元包括场景预案模块、串口通讯模块、数据解析模块、实时计算模块、指令处理模块,所述场景设计模块设定标准化测试场景及参数并存入所述场景预案模块,所述串口通讯模块包括通讯模块vii、通讯模块viii、通讯模块ix,同时平台包含串口i、串口ii和串口iii等共串口,所述通讯模块vii将接收到的车辆的行驶数据通过串口i输出,所述通讯模块ix将接收到的模拟交通流底盘的行驶状态数据通过串口iii输出;
49.测试时,所述场景预案模块将某一测试场景的参数发送至所述实时计算模块,所述数据解析模块将接收到的车辆的行驶数据、模拟交通流底盘的行驶状态数据进行解析、归类和统计等工作,并发送至所述实时计算模块,所述实时计算模块计算得到代表指令的结果数据并发送给指令处理模块,所述指令处理模块通过串口ii和所述通讯模块viii发送至所述通讯模块v,串口ii把启动、停止和复位等数据发送给通讯模块viii,再通过433通讯协议接收到通讯模块v,以控制模拟交通流底盘执行启动(正常启动,以某个加速度启动)、停止(正常停止、以某个加速度停止、以最大加速度停止)切车(变道)、掉头、曲线行驶(s弯)等指令,根据场景设定,车载计算单元会实时根据场景要求自动调节车辆的加速度、速度、减速度、来匹配测试场景要求。
50.在上述技术方案中,能够满足自动驾驶车辆不同测试场景的定量化测试,且具有结构简单、成本低的优点,用于帮助自动驾驶车辆开展标准化测试场景的测试,后期结果分析可用于自动驾驶系统针对具体场景通过率和存在问题的分析,以提高自动驾驶系统的安全性与可靠性,最大程度地减少对人员的伤害或对车的损害。
51.以下采用多个实例进行标准化测试场景说明:
52.1.危险类场景
53.1.1行人从停靠车辆后方横穿的实例:
54.1.1.1测试场景
55.测试道路为至少包含双车道的长直道路。测试车辆直行,行人从停靠车辆后方横穿,两者存在碰撞的风险。
56.1.1.2测试方法:
57.a)测试车辆(vut)以初始速度在直线道路上行驶;
58.b)测试车辆(vut)右侧放置停止的目标车辆1(vt1)和目标车辆2(vt2),vt1与目vt2之间的纵向距离为d2=1.0,目标车辆(vt1、vt2)与测试车辆(vut)右侧车道线之间的横向距离为d1=0.5m;
59.c)目标车辆2(vt2)前方放置等待穿行本车道行人,目标车辆2(vt2)与行人之间纵向距离为d3=1.0m,行人与测试车辆(vut)所在车道中心线之间的距离为d=4.0m;
60.d)测试车辆(vut)与行人之间的ttc为4s时,行人以5~6.5km/h的速度横穿车道。
61.1.1.3评估标准
62.测试车辆发生碰撞或刮擦的,不通过。
63.1.2非机动车穿行的实例:
64.1.2.1测试场景
65.测试道路为至少包含双车道的长直道路。测试车辆直行,遇到非机动车穿行本车道,两者存在碰撞的风险。
66.1.2.2测试方法:
67.a)测试车辆以初始速度在直线道路上行驶;
68.b)本车道右侧放置等待穿行本车道非机动车,非机动车与车道中心线之间的距离为d=8m;
69.c)测试车辆与非机动车之间的纵向ttc为4s时,非机动车以10.0~15.0km/h的速度从测试车辆前方穿行车道。
70.1.2.3评估标准
71.测试车辆发生碰撞或刮擦的,不通过。
72.1.3非机动车穿行
‑
遮挡的实例:
73.1.3.1测试场景
74.测试道路为至少包含双车道的长直道路。测试车辆直行,遇到被遮挡的非机动车穿行本车道,两者存在碰撞的风险。
75.1.3.2测试方法:
76.a)测试车辆(vut)以初始速度在直线道路上行驶;
77.b)测试车辆(vut)右侧放置停止的目标车辆1(vt1)和目标车辆2(vt2),vt1和vt2之间的纵向距离为d2=1.0,目标车辆(vt1、vt2)与测试车辆(vut)右侧车道线之间的横向距离为d1=0.5m;
78.c)目标车辆2(vt2)前方放置等待穿行本车道非机动车,目标车辆2(vt2)与非机动车之间纵向距离为d3=1.0m,非机动车与测试车辆(vut)所在车道中心线之间的距离为d=8.0m;
79.d)测试车辆(vut)与非机动车之间的ttc为4s时,非机动车以10~15km/h的速度从测试车辆(vut)前方穿行车道。
80.1.3.3评估标准
81.测试车辆发生碰撞或刮擦的,不通过。
82.1.4路口左转遇左侧垂直车道人行横道行人的实例:
83.1.4.1测试场景
84.测试道路为至少包含双向双车道的十字路口道路。测试车辆行驶在标有左转指示标线的车道上,左转通过十字路口,行人从左侧垂直车道外侧穿行人行横道,行人与测试车辆存在碰撞风险。
85.1.4.2测试方法:
86.a)测试车辆以初始速度接近十字路口;
87.b)左侧垂直车道右侧放置等待通过人行横道的行人;
88.c)测试车辆左转通过十字路口过程中,测试车辆距离预计冲突点时距为4s时,行人以5~6.5km/h的速度从左侧垂直车道右侧通过人行横道。
89.1.4.3评估标准
90.测试车辆发生碰撞或刮擦的,不通过。
91.1.5路口右转遇右侧垂直车道人行横道行人的实例:
92.1.5.1测试场景
93.测试道路为至少包含双向双车道的十字路口道路。测试车辆行驶在标有右转指示标线的车道上,右转通过十字路口,行人从右侧垂直车道外侧穿行人行横道,行人与测试车辆存在碰撞风险。
94.1.5.2测试方法:
95.a)测试车辆以初始速度接近十字路口;
96.b)右侧垂直车道右侧放置等待通过人行横道的行人;
97.c)测试车辆右转通过十字路口过程中,测试车辆距离预计冲突点时距为4s时,行
人以5~6.5km/h的速度从右侧垂直车道右侧通过人行横道。
98.1.5.3评估标准:
99.a)测试车辆发生碰撞或刮擦的,不通过;
100.b)未正确使用转向灯的,不通过。
101.1.6前方车辆急刹的实例:
102.1.6.1测试场景
103.测试道路为至少包含一条车道的长直道路。测试车辆和目标车辆在同一车道内行驶。
104.1.6.2测试方法:
105.a)测试车辆(vut)在测试道路上以初始速度行驶;
106.b)左侧车道内目标车辆1(vt1)直行,调整车速保持在测试车辆(vut)左侧前后3m区域内行驶;
107.c)目标车辆2(vt2)在测试车辆(vut)前方低速行驶,与测试车辆(vut)的重叠率为25%~100%,测试车辆(vut)跟车行驶超过5s后,目标车辆2(vt2)在1s内达到6m/s2的减速度直至停车。
108.1.6.3评估标准:
109.a)测试车辆发生碰撞或刮擦的,不通过;
110.b)未正确使用转向灯的,不通过。
111.1.7跟车时前方车辆切出的实例:
112.1.7.1测试场景
113.测试道路为至少包含一条车道的长直道路。测试车辆和目标车辆1在同一车道内行驶。目标车辆2静止于同一车道内前方。
114.1.7.2测试方法:
115.a)测试车辆(vut)以初始速度在车道内接近目标车辆1(vt1);
116.b)测试车辆(vut)跟随前方行驶目标车辆1(vt1)驶向同一车道的前方静止目标车辆2(vt2),vt1和vt2的重叠率为25%~100%;
117.c)当vt1距离vt2的ttc等于4s时,vt1从本车道切出至相邻车道。
118.1.7.3评估标准
119.测试车辆发生碰撞或刮擦的,不通过。
120.在一个具体实例中,如附图13所示,
121.步骤1:交通流控制底盘服务端计算单元获取安装在自动驾驶车辆(vut)和交通流模拟底盘(vt)上获取惯导(惯导天线位置坐标)w1(x1,y1),w2(x2,y2)坐标的实时数据;
122.步骤2:将获取到的w1,w2的经纬度坐标数据转换成直角坐标数据,需要通过高斯投影将其转换成高斯坐标,由已知的参心大地坐标系中点的大地纬度和大地经度(b,l),求相应的高斯投影直角坐标(x,y)的公式,称为高斯投影正算公式。公式如下:设参考椭球的长半轴为a,第一偏心率为e,则高斯投影正算公式如下。(l、b为转换前的经纬度坐标;x、y为转换后的高斯坐标;l0为投影带的中央经线坐标;c0、c1、c2、c3为与点位无关而只与椭球参数有关的常数)
123.[0124][0125]
式中
[0126][0127]
t=tanb
[0128]
l=l
‑
l0[0129]
m0=lcosb
[0130][0131][0132]
此步骤如附图14所示;
[0133]
通过以上公式,可将w1(x1,y1)转换成p1(x1,y1);w2(x2,y2)转换成p2(x2,y2)
[0134]
步骤3:利用直角坐标系中,p1,p2坐标可求出m的长度,
[0135]
如下:
[0136]
步骤4:已知m和d=的长度,利用直角三角形勾股定理m2=l2+d2可求解l的长度;
[0137]
步骤5:计算单元实时获取自动驾驶车辆惯导传回的速度v,可获取ttc=l/v=4s的时刻;
[0138]
步骤6:计算单元计算当满足ttc=4s时,会给交通流模拟底盘下发以速度v
′
行驶,并行驶距离为10(计算方式如上所属)米时下达停车指令。
[0139]
在另一种技术方案中,所述客户端单元还包括数据存储模块、数据转发模块,所述服务器端单元还包括实时展示模块,所述数据存储模块将接收到的车辆的行驶数据、模拟交通流底盘的行驶状态数据的原始数据和格式化数据存储并通过所述数据转发模块发送至所述实时展示模块进行可视化展示。如图15
‑
17所示,具有更加直观的展示效果。
[0140]
在另一种技术方案中,所述服务器端单元还包括数据处理模块,所述数据存储模块存储接收到的车辆的行驶数据、模拟交通流底盘的行驶状态数据并通过所述数据处理模块导入和导出进行数据分析。可以根据距离而分析自动驾驶车辆的感知能力,可以根据自动驾驶车辆在路口的转弯半径分析其自动驾驶驾驶行为所属域的,根据根据ttc中的驶距判断自动驾驶车辆刹车响应速度的。可以根据危险场景数据是否发生碰撞来分析其自动驾驶控制能力等等。
[0141]
在另一种技术方案中,所述服务器端单元还包括远程操作模块,所述实时计算模块计算得到结果数据通过所述远程操作模块发送给指令处理模块。通过远程操作的方式使操作便捷、简单,整个过程完全可以通过终端进行配置、安装、维护、监控与管理。
[0142]
在另一种技术方案中,所述服务器端单元包括系统日志模块,记录测试场景开始、执行、结束的时间戳不同数据的对齐。主要作用有两个,记录场景测试时发生关键事件的时刻点(开始、结束、满足标准场景条件(距离、速度、ttc、时距、ddc等)的时刻)以及不同数据的时间对齐,记录数据供分析系统分析;与底盘控制系统属于从属关系是底盘控制系统的一个子模块。
[0143]
在另一种技术方案中,车辆的行驶数据包括车辆的速度、位置、加速度和航向角,模拟交通流底盘的行驶状态数据包括模拟交通流底盘的速度、位置、加速度和航向角。
[0144]
速度:用于自动驾驶车辆(vut)和交通流模拟底盘(vt)两者时间动态点的ttc计算,用于交通流模拟底盘(vt)到高精地图边缘(可以是到道路边线,可以是路口停止线)固定点的thw计算。
[0145]
位置:用于自动驾驶车辆与交通流模拟底盘之间的距离计算,轨迹规划高精地图中的临界点计算,电子围栏计算。
[0146]
加速度:用于特定场景下交通流模拟底盘的制动力度,制动距离的计算。
[0147]
航向角:用于自动驾驶车辆,交通流模拟底盘转弯,变道,切车,掉头等动作中关于横向速度,横向加速度,转弯半径要求的计算。
[0148]
基于可控交通流的自动驾驶测试方法,其特征在于,应用所述的测试系统,包括:
[0149]
步骤1、于车辆底盘附着一工具,以模拟交通流;
[0150]
步骤2、设定标准化测试场景及相应参数;
[0151]
步骤3、择一测试场景并发送相应参数,同时获取并发送车辆的行驶数据以及模拟交通流底盘的行驶状态数据;
[0152]
步骤4、解析数据、计算,根据计算结果控制模拟交通流底盘执行启动、停止或复位。
[0153]
电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行所述的方法。
[0154]
存储介质,其上存储有计算机程序,该程序被处理器执行时,实现所述的方法。
[0155]
这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
[0156]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1