基于opencv技术的井下粉尘监测与防治系统及方法
1.本发明具体涉及一种基于opencv技术的井下粉尘监测与防治系统及方法。
背景技术:
2.近年来,随着矿井综合机械化开采水平的不断提高、开采深度的不断增加,采掘工作面的粉尘量也逐渐增大。在煤炭生产、运输、选煤及非煤矿山破岩、落矿、运输选矿等采矿工艺中,均伴生大量粉尘。粉尘污染不仅恶化了工作面的作业环境,同时大大增加了工作人员患尘肺病的概率,高浓度的粉尘还可造成严重的粉尘爆炸事故。因此,粉尘污染成为制约矿山生产安全、人员安全的重要影响因素。
3.为减轻粉尘的上述危害,目前国内外在监测与防治粉尘污染的方面进行了诸多研究;目前井下粉尘的监测方法主要有滤膜称重法、β射线法、光散射法和微量振荡天平法等。滤膜称重法按照规定流量,人工将粉尘捕集于高性能滤膜上,但是该种方法的人工操作准确性低;β射线法通过β射线照射并测定捕集粉尘前后穿过滤纸的射线强度,间接得出粉尘质量,但是该种方法成本高而且操作复杂;光散射法的测定效果较好,但光学仪器易损伤。同时,虽然存在更为先进的技术设备,如美国的粉尘雷达、英国的西姆斯林,德国的tm,重庆煤科院的粉尘传感器等,但是都存在粉尘传感器易堵、成本较高、技术复杂性高等不足之处。
4.同时,对于井下粉尘的控制措施,井下作业常采用干式除尘装置或湿式除尘装置。干式除尘装置包括沉降式、捕尘罩、布袋除尘器及通风机等,适用于高瓦斯突出煤层或软煤层开采;湿式除尘装置包括供水装置、排渣装置及风水混合装置等,优点是在湿润环境下效果较好。但是,干式除尘装置和湿式除尘装置又都存在除尘效率低、维护困难,易二次污染、风水量难以控制,混合不均匀等缺点。
技术实现要素:
5.本发明的目的之一在于提供一种基于opencv技术的井下粉尘监测及防治系统,能够高效准确地对井下粉尘进行监测与防治。
6.本发明的目的之二在于提供一种所述基于opencv技术的井下粉尘监测及防治系统的方法。
7.本发明提供的这种基于opencv技术的井下粉尘监测及防治系统,其特征在于包括数据处理站台、井下粉尘监测系统和泡沫除尘系统;数据处理站台分别连接井下粉尘监测系统和泡沫除尘系统;井下粉尘监测系统进行摄像并将拍摄的原色三彩图上传到数据处理站台;数据处理站台进行数据处理并控制泡沫除尘系统;泡沫除尘系统对井下粉尘进行防治动作。
8.所述的井下粉尘监测系统包括第一高清摄像头、第二高清摄像头、第一信号传输器和第二信号传输器;第一高清摄像头连接第一信号传输器,第二高清摄像头连接第二信号传输器;第一高清摄像头、第二高清摄像头能够360度自由转向,与工作面形成设定的夹
角并同时摄像,将拍摄到的原色三彩图通过各自的信号传输器与地面上的数据处理站台进行实时连接,将工作中监测到的粉尘情况以原色三彩图形式输出到数据处理站台进行处理;数据处理站台包括控制器、数据显示台和除尘控制台;控制器进行数据处理;数据显示台对控制器处理后数据进行直观显示;除尘控制台与泡沫除尘系统连接,用于控制泡沫除尘系统执行粉尘防治动作;泡沫除尘系统包括泡沫发生器、发泡液输送管、第一泡沫喷头和第二泡沫喷头;泡沫发生器接收数据处理站台发出的粉尘防治信号,制备发泡液通过发泡液输送管输送至工作面粉尘污染处,通过第一泡沫喷头和第二泡沫喷头将泡沫喷出。
9.本发明还提供了一种上述的基于opencv技术的井下粉尘监测及防治系统的方法,其特征在于包括如下步骤:
10.s1.输入高清摄像头采集的原色三彩图;
11.s2.将原色三彩图转换为灰度图,生成灰度值;
12.s3.对步骤s2中生成的灰度图进行二值化处理;
13.s4.定义结构元素图像的集合b,对步骤s3二值化处理后的灰度图去噪,并确定步长(x,y);
14.s5.检测粉尘边框,绘制粉尘轮廓,并将绘制到的粉尘轮廓大小表示为粉尘大小;
15.s6.对步骤s5得到的粉尘数据进行评价,并与规程规定工作面粉尘污染浓度标准对比,并根据对比结果进行除尘。
16.步骤s2,具体包括原色三彩图转换为灰度图的计算公式:
17.gray=0.1140*c+0.5870*g+0.2989*r
18.其中c代表蓝色通道的像素值,g代表绿色通道的像素值,r代表红色通道的像素值,计算出灰度值gray。
19.步骤s3,具体包括如下步骤:
20.(1)采用局域阈值的大津算法对图像进行二值化处理,通过邻域平均法对灰度图进行多目标分隔
[0021][0022]
其中(i,j)∈m,(i,j)为步骤s2获取的灰度图领域中各邻近像素的坐标,m为包含的邻域中邻近像素的个数;n为包含中心像素点的像素总个数;
[0023]
(2)确定阈值类型:
[0024][0025]
其中dst(x,y)为二值化结果;该公式表示当像素块大于邻域阈值t时,dst(x,y)为255,否则输出为0。
[0026]
步骤s4具体为将步骤s3二值化处理的后的灰度图进行十字交叉去噪,包括如下步骤:
[0027]
a.进行开运算去噪,定义集合
[0028]
[0029]
其中a为二值化处理的后的灰度图的集合,b为结构元素图像的集合;二值化处理的后的灰度图的集合a被结构元素图像的集合b做开运算,具体为二值化处理的后的灰度图的集合a被结构元素图像的集合b腐蚀后的结果再被结构元素图像的集合b膨胀;
[0030]
因此,结构元素图像的集合b在二值化处理的后的灰度图的集合a内的平移得到的集合并集表示为:
[0031][0032]
其中x为步长的坐标;
[0033]
b.定义腐蚀运算集合,具体为:
[0034][0035]
其中b∈b,x为图像中的像素集合,b为结构元素图像的集合,表示为x被b的腐蚀,为腐蚀算子;
[0036]
c.定义膨胀运算集合
[0037][0038]
其中x1∈x,b∈b,x为图像中的像素集合,b为结构元素图像的集合,表示为x被b的膨胀,为膨胀算子;
[0039]
d.选取最大值。
[0040]
步骤d具体包括如下步骤:
[0041]
1)以结构元素图像的中心点作为运算的原点,结构元素以从左到右、从上到下的顺序以结构元素图像的集合b做关于原点的映射,并平移;
[0042]
2)x被b膨胀后,具体为b(x,y)被所有x平移到a点,生成有非零元素的集合;膨胀过程用于遍历图像中的每一个像素点;
[0043]
3)根据结构元素的值周围点的灰度值进行计算,比较局部范围内的像素点与结构元素中所对应点的灰度值之和,选取所计算的局部范围内的像素点与结构元素中所对应点的灰度值之和的最大值。
[0044]
步骤s5,具体包括检测框以从左到右、从上到下的顺序,对s4输出的图像进行像素值扫描:初始值检测为0,当扫描到像素值为255时,认定该检测框为粉尘的外轮廓,并针对对角线方向,只保留检测方向的终点坐标;完成粉尘轮廓的检测后,对检测结果进行整理:输出若干以列表形式呈现的点集,并对点集进行轮廓绘制。
[0045]
步骤s6具体包括如下评价:根据工作场所粉尘浓度标准,得出工作井下粉尘中游离sio2含量,进而选用的具体粉尘评价标准;根据公式求出工作面实时粉尘污染浓度:c=(nm)/v,其中c为工作面实时粉尘污染浓度,n为步骤s5通过绘制测得的粉尘粒数,m为粉尘单粒质量,为5
×
10
‑
5mg/粒,v为被污染的环境体积;最后将工作面得出的粉尘污染浓度与规程对应总粉尘浓度作比对,得出评价结果。
[0046]
步骤s2~步骤s5采用opencv运算,包括如下步骤:
[0047]
1).利用opencv中的cv2.cvtcolor函数将原色三彩图转换为灰度图,计算公式为
[0048]
gray=0.1140*c+0.5870*g+0.2989*r
[0049]
其中c代表蓝色通道的像素值,g代表绿色通道的像素值,r代表红色通道的像素值,计算出灰度值gray;
[0050]
2).利用cv2.adaptivethreshold函数实现局部阈值的大津算法对图像二值化处理,进行多目标分割;函数具体表示为:cv2.adaptivethreshold(inputarray src,outputarray dst,double maxvalue,int adaptivemethod,int thresholdtype,int blocksize,double c),inputarray src表示源图像,outputarray dst表示输出图像,大小与源图像一致;int adaptivemethod表示在一个邻域内计算的阈值,分别取为adaptive_thresh_mean_c和adaptive_thresh_gaussian_c;adaptive_thresh_mean_c:邻域平均值减double c值;adaptive_thresh_gaussian_c:邻域的高斯均值减double c值;int thresholdtype:阈值类型,分别取thresh_binary和thresh_binary_inv;int blocksize:邻域块大小;double c:偏移值调整量;
[0051]
3).采用cv2.getstructuringelement函数进行形态学去噪,cv2.morphologyex函数进行开运算去噪;cv2.getstructuringelement函数具体表示为cv2.getstructuringelement(cv2.morph_cross,(x,y)),morph_cross表示交叉性去噪,x,y分别表示内核的尺寸以及锚点的位置;上述cv2.morphologyex函数具体表示为cv2.morphologyex(src,op,kernel),src表示输入图像;op表示变化方式,可进行开运算与闭运算;kernel表示去噪检测框的大小;
[0052]
4).采用cv2.findcontours函数检测粉尘边框,cv2.drawcontours绘制粉尘轮廓,绘制得出轮廓大小表示为粉尘大小;cv2.findcontours为opencv
‑
python接口中的内置函数;函数具体表示为:cv2.findcontours(image,mode,method[,contours[,hierarchy[,offset]]]),返回两个值,一是轮廓本身,另一个是每个轮廓对应的属性;contour返回值:函数首先返回一个列表,列表元素都是图像的一个轮廓,用矩阵表示;hierarchy返回值:用矩阵表示,其中的元素个数和轮廓个数相同,每个轮廓对应4个元素hierarchy[i][0]~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,若没有对应项,则该值为负数;cv2.drawcontours函数具体表示为:cv2.drawcontours(image,contours,contouridx,color[,thickness[,linetype[,hierarchy[,maxlevel[,offset]]]]]),image是指明绘制轮廓的图像位置;contours为轮廓,以列表形式呈现;contouridx指定轮廓,若设置
‑
1,则绘制所有轮廓;后述参数对轮廓样式进行调整。
[0053]
本发明提供的这种基于opencv技术的井下粉尘监测与防治系统及方法,利用opencv图像处理技术,对井下粉尘的状况进行监测,并设定评价体系进行防治。本方法准确地识别了粉尘,成本低,效率高。
附图说明
[0054]
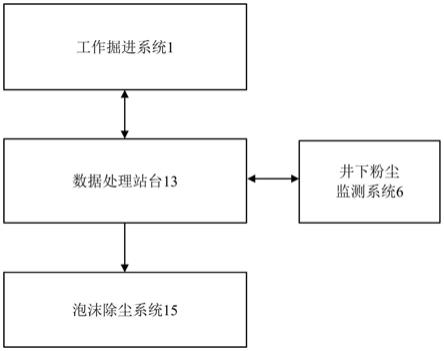
图1为本发明系统的功能模块图。
[0055]
图2为本发明系统的主视图。
[0056]
图3为本发明系统的俯视图。
[0057]
图4为本发明方法的流程示意图。
[0058]
图5为本发明实施例的观测结果图。
[0059]
图6为本发明实施例的处理结果图。
具体实施方式
[0060]
如图1为本发明系统的功能模块图。图中已经包括了工作掘进系统1;同时,本发明提供的这种基于opencv技术的井下粉尘监测与防治系统,还包括数据处理站台13、井下粉尘监测系统6和泡沫除尘系统15;数据处理站台13分别连接工作掘进系统1、井下粉尘监测系统6和泡沫除尘系统15;工作掘进系统1进行切割回采动作,对矿石进行挖掘;井下粉尘监测系统6进行摄像并将拍摄的原色三彩图上传到数据处理站台;数据处理站台13进行数据处理并控制泡沫除尘系统;泡沫除尘系统15对井下粉尘进行防治动作。
[0061]
如图2为本发明系统的主视图。如图3为本发明系统的俯视图。所述的工作掘进系统1包括掘进机2、落矿滚筒3和工作面4;掘进机2连接落矿滚筒3;掘进机2在划定采准巷道后,对工作面4进行切割,完成切割后,进行回采;落矿滚筒3将回采过程中产生的矿石运交选矿厂或矿仓。掘进机含底部支撑架,更为稳固。其中掘进方向5为掘进机前进的方向;
[0062]
井下粉尘监测系统6包括第一高清摄像头7、第二高清摄像头8、第一信号传输器9和第二信号传输器10;第一高清摄像头7连接第一信号传输器9,第二高清摄像头8连接第二信号传输器10;第一高清摄像头7、第二高清摄像头8能够360度自由转向,与工作面4形成一定夹角同时摄像,将拍摄到的原色三彩图通过信号传输器9和信号传输器10与地面上的数据处理站台13进行实时连接,以10s为时间间隔,将工作中监测到的粉尘情况以原色三彩图形式输出到数据处理站台13进行处理。
[0063]
数据处理站台13包括控制器11、数据显示台14和除尘控制台12;控制器11进行数据处理;数据显示台14对控制器11处理后数据进行直观显示;除尘控制台12与泡沫除尘系统15信号连接,通过粉尘污染评价决策执行粉尘防治动作。
[0064]
泡沫除尘系统15包括泡沫发生器16、发泡液输送管17、第一泡沫喷头19和第二泡沫喷头20;泡沫发生器16接收数据处理站台13发出的粉尘防治信号,制备发泡液通过发泡液输送管17输送至工作面4粉尘污染处,通过第一泡沫喷头19和第二泡沫喷头20将泡沫喷出。
[0065]
其中自由转轴18控制第一高清摄像头7、第二高清摄像头8、第一泡沫喷头19和第二泡沫喷头20能够360度自由转向。
[0066]
如图4为本发明方法的流程示意图:本发明提供的这种基于opencv技术的井下粉尘监测与防治系统的方法,包括如下步骤:
[0067]
s1.输入高清摄像头采集的原色三彩图;
[0068]
s2.将原色三彩图转换为灰度图,生成灰度值;具体包括原色三彩图转换为灰度图的计算公式:
[0069]
gray=0.1140*c+0.5870*g+0.2989*r
[0070]
其中c代表蓝色通道的像素值,g代表绿色通道的像素值,r代表红色通道的像素值,计算出灰度值gray;
[0071]
s3.对步骤s2中生成的灰度图二值化处理;具体包括如下步骤:
[0072]
(1)采用局域阈值的大津算法,具体为通过邻域平均法对灰度图进行多目标分隔
[0073][0074]
其中(i,j)∈m,m为步骤s2所取灰度图领域中各邻近像素的坐标,同时包含的邻域
中邻近像素的个数;n为包含中心像素点的像素总个数;
[0075]
(2)确定阈值类型:
[0076][0077]
其中dst(x,y)为二值化结果;该公式表示当像素块大于邻域阈值t时,dst(x,y)为255,否则输出为0;
[0078]
s4.定义结构元素图像的集合b,对步骤s3二值化处理的后的灰度图去噪,并确定步长(x,y);具体为将步骤s3二值化处理的后的灰度图进行十字交叉去噪,包括如下步骤:
[0079]
a.进行开运算去噪,定义集合
[0080][0081]
其中a为二值化处理的后的灰度图的集合,b为结构元素图像的集合;二值化处理的后的灰度图的集合a被结构元素图像的集合b做开运算具体为,二值化处理的后的灰度图的集合a被结构元素图像的集合b腐蚀后的结果再被结构元素图像的集合b膨胀;
[0082]
因此,结构元素图像的集合b在二值化处理的后的灰度图的集合a内的平移得到的集合并集表示为:
[0083][0084]
其中x为步长的坐标。
[0085]
b.定义腐蚀运算集合,具体为:
[0086][0087]
其中b∈b,x为图像中的像素集合,b为结构元素图像的集合,表示为x被b的腐蚀,为腐蚀算子;
[0088]
c.定义膨胀运算集合
[0089][0090]
其中x1∈x,b∈b,x为图像中的像素集合,b为结构元素图像的集合,表示为x被b的膨胀,为膨胀算子;
[0091]
d.选取最大值:
[0092]
1)以结构元素图像的中心点作为运算的原点,结构元素以从左到右、从上到下的顺序以结构元素图像的集合b做关于原点的映射,并平移;
[0093]
2)x被b膨胀后,具体为b(x,y)被所有x平移到a点,生成有非零元素的集合;膨胀过程用于遍历图像中的每一个像素点;
[0094]
3)根据结构元素的值周围点的灰度值进行计算,比较局部范围内的像素点与结构元素中所对应点的灰度值之和,选取所计算的局部范围内的像素点与结构元素中所对应点的灰度值之和的最大值,滤去了二值化后的灰度图的噪声;
[0095]
s5.检测粉尘边框,绘制粉尘轮廓,并将绘制到的粉尘轮廓大小表示为粉尘大小;具体包括检测框以从左到右、从上到下的顺序,对s4输出的图像进行像素值扫描;初始值检
测为0,当扫描到像素值为255时,认定该检测框为粉尘的外轮廓,并针对对角线方向,只保留检测方向的终点坐标;完成粉尘轮廓的检测后,对检测结果进行整理,具体为输出若干以列表形式呈现的点集,并对点集进行轮廓绘制;
[0096]
s6.对步骤s5得到的粉尘数据进行评价,并与规程规定工作面粉尘污染浓度标准对比,并根据对比结果进行除尘:判断井下工作面粉尘污染情况是否超出允许量;如超出允许量,除尘系统控制台输出信号,启动泡沫发生器制备除尘泡沫,发泡液通过运输管道,由泡沫喷头实现定向控尘;具体包括如下评价:根据工作场所粉尘浓度标准,得出工作井下粉尘中游离sio2含量,进而选用的具体粉尘评价标准;根据公式求出工作面实时粉尘污染浓度:c=(nm)/v,其中c为工作面实时粉尘污染浓度,n为步骤s5通过绘制测得的粉尘粒数,m为粉尘单粒质量,为5
×
10
‑5mg/粒,v为被污染的环境体积;最后将工作面得出的粉尘污染浓度与规程对应总粉尘浓度作比对,总粉尘评价选用10mg/m3或2mg/m3,得出评价结果。
[0097]
在具体实施时,基于opencv技术的井下粉尘监测与防治系统的方法的步骤s2~步骤s5采用opencv运算,包括如下步骤:
[0098]
1).利用opencv中的cv2.cvtcolor函数将原色三彩图转换为灰度图,计算公式为
[0099]
gray=0.1140*c+0.5870*g+0.2989*r
[0100]
其中c代表蓝色通道的像素值,g代表绿色通道的像素值,r代表红色通道的像素值,计算出灰度值gray;
[0101]
2).利用cv2.adaptivethreshold函数实现局部阈值的大津算法对图像二值化处理,进行多目标分割;函数具体表示为:cv2.adaptivethreshold(inputarray src,outputarray dst,double maxvalue,int adaptivemethod,int thresholdtype,int blocksize,double c),inputarray src表示源图像,outputarray dst表示输出图像,大小与源图像一致;int adaptivemethod表示在一个邻域内计算的阈值,分别取为adaptive_thresh_mean_c和adaptive_thresh_gaussian_c。adaptive_thresh_mean_c:邻域平均值减double c值;adaptive_thresh_gaussian_c:邻域的高斯均值减double c值。int thresholdtype:阈值类型,分别取thresh_binary和thresh_binary_inv;int blocksize:邻域块大小;double c:偏移值调整量;
[0102]
3).采用cv2.getstructuringelement函数进行形态学去噪,cv2.morphologyex函数进行开运算去噪。上述cv2.getstructuringelement函数具体表示为cv2.getstructuringelement(cv2.morph_cross,(x,y)),morph_cross表示交叉性去噪,x,y分别表示内核的尺寸以及锚点的位置;上述cv2.morphologyex函数具体表示为cv2.morphologyex(src,op,kernel),src表示输入图像;op表示变化方式,可进行开运算与闭运算;kernel表示去噪检测框的大小。
[0103]
4).采用cv2.findcontours函数检测粉尘边框,cv2.drawcontours绘制粉尘轮廓,绘制得出轮廓大小表示为粉尘大小。cv2.findcontours为opencv
‑
python接口中的内置函数。函数具体表示为:cv2.findcontours(image,mode,method[,contours[,hierarchy[,offset]]]),返回两个值,一是轮廓本身,另一个是每个轮廓对应的属性;contour返回值:函数首先返回一个列表,列表元素都是图像的一个轮廓,用矩阵表示;hierarchy返回值:用矩阵表示,其中的元素个数和轮廓个数相同,每个轮廓对应4个元素hierarchy[i][0]~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,若没
有对应项,则该值为负数。
[0104]
cv2.drawcontours函数具体表示为:cv2.drawcontours(image,contours,contouridx,color[,thickness[,linetype[,hierarchy[,maxlevel[,offset]]]]]),image是指明绘制轮廓的图像位置;contours为轮廓,以列表形式呈现。contouridx指定轮廓,若设置
‑
1,则绘制所有轮廓。后述参数对轮廓样式进行调整。
[0105]
具体实施过程中:
[0106]
此次试验选在某矿井3号煤层作为试验基地。该矿井为深部井田,本区呈单斜构造,采用立井开拓。由于井下机械化程度较高,采掘作业、运输、转载矿石过程中缺乏系统有效的除尘降尘措施,粉尘污染情况较严重,同时井下狭窄空间人员分布较密。鉴于此,在该3号煤层17226巷道进行本次粉尘监测防治试验。试验步骤如下:
[0107]
步骤1、准备硬件设施,包括工作掘进系统1、掘进机2、落矿滚筒3、工作面4、掘进方向5、井下粉尘监测系统6、高清摄像头7、高清摄像头8、信号传输器9、信号传输器10、计算机11、除尘控制台12、数据处理站台13、数据显示屏14、泡沫除尘系统15、泡沫发生器16、发泡液运输管17、自由转轴18、泡沫喷头19和泡沫喷头20。进行采准巷道的划分,利用截割机对工作面进行截割;
[0108]
步骤2、利用掘进机2进行破岩、落矿,同时铲运机运输矿石将回采过程中的矿石运交到选矿厂或矿仓;在掘进机2进行工作时,摄像头7和摄像头8每十秒对工作面粉尘情况进行高清摄影,并将图像传输至地面数据处理站台13;
[0109]
步骤3、数据处理站台13接收到井下粉尘数据时,在计算机11中利用opencv技术对数据进行分析处理:包括将原色三彩图转换为灰度图,生成灰度值;采用局部阈值的大津算法对图像二值化处理;定义结构元素b,采用十字交叉去噪,并确定步长(x,y);检测粉尘边框,绘制粉尘轮廓,并将绘制到的粉尘轮廓大小表示为粉尘大小;
[0110]
步骤4、对计算机11得出的粉尘数据进行评价,与规程规定工作面粉尘污染浓度标准对比,判断井下工作面粉尘污染情况是否超出允许量。如超出允许量,除尘系统控制台12输出信号,启动泡沫发生器16制备除尘泡沫,发泡液通过运输管道17,由泡沫喷头19和泡沫喷头20实现定向控尘。至此,完成一次粉尘监测及防治周期。
[0111]
步骤5、循环步骤1~步骤5,对工作面掘进工作时粉尘情况实现连续监测,直至一个采场内的矿体全部采集完成。
[0112]
对17226巷道工作面运用本发明方法监测粉尘污染情况。观测结果如图4所示,经计算机opencv技术处理原粉尘图所得结果如图5和图6所示。
[0113]
从图4中可知,在该煤矿3号煤层17226巷道运用一种基于opencv技术的井下粉尘监测及防治系统方法,计算机成功将井下粉尘监测系统监测得到的粉尘污染实时高清图像经过opencv技术,显现出了粉尘颗粒的数量及对应标记,同时储存了粉尘颗粒的被污染环境面积大小。该粉尘检测过程符合工作面粉尘污染实际情况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1