一种基于二维任意阵子空间的超短基线定位水下声源方法
1.本发明属于阵列信号处理、海洋学等多学科交叉领域,尤其涉及一种基于二维任意阵子空间的超短基线定位水下声源方法。
背景技术:
2.在海洋环境中,由于海洋介质对电磁波和光波的传播衰减,导致gps等陆地设备在海洋中无法使用。而声波在海洋中的传播衰减较弱,因此可以使用声学元件进行水下目标的检测、识别、定位和跟踪。
3.浅海海洋中的定位问题是海洋科学研究和技术应用的基本问题,其中应用到的一个重要领域是水下航行器的定位问题。水下滑翔机是一种高效的海洋工具,使用可移动内部块以及净浮力来控制其运动特性,一般只有进行传感器测量以及改变航行条件时才消耗能量。相对于目前主流的水下自主航行器,其具有能耗低,航行距离长等优势。华盛顿大学开发的seaglider[l.techy,k.a.morganseny and c.a.woolseyz,"long
‑
baselineacoustic localization ofthe seaglider underwater glider,"proceedings ofthe 2011americancontrol conference,san francisco,ca,2011,pp.3990
‑
3995.]针对定位需求携带有电导率
‑ꢀ
温度深度(ctd)传感器以及各种导航仪,包括gps单元、3d指南针、声波测距仪等设备,同时,其设备嵌套了长基线声学导航系统,利用卡尔曼滤波进行水下航行器动态位置估算。但其长基线系统存在信标安装困难问题。
[0004]
在目前存在的水声定位技术中,由于超短基线水声定位系统(ultra
‑
short base line, usbl)声学基阵尺寸较小,基阵可以看作一个独立的单元安装在水下噪声小的区域,不必如同长基线定位系统那样在海底布放和校准声学基阵,因此在国内外研究中得到广泛的关注。
[0005]
目前,超短基线水声定位方法中,主要分为基于相位差的距离方法定位和基于时延差的距离方法定位。基于相位差的方法中,通过测量不同阵元接收信号的相位差进行定位结算。该计算方法只适用于窄带信号,其定位精度主要取决于各轴上相邻阵元相位差的测量精度。但由cramer
‑
rao下限理论可知,其相位差估计精度取决于信噪比。基于时延差定位的方法中,目前常采用的方法主要有广义互相关和互谱法。互谱相位法,把求时间上的时延差转为求互谱函数的相位差。在估计互谱的相位时,通常会存在相位卷绕问题。而广义互相关时延估计法主要利用了两信号时延差与其相关函数峰值位置的对应关系进行时延估计。相对于互谱法,计算量小,工程实现简单,因此应用范围广。但由于复杂水下环境与水声信号含有高噪声,其伪峰效果明显。在广义互相关的基础上提出了大量改进算法,包括xu xiaosu等人提出的重复广义互相关时延估计,先通过一次自相关,之后再进行互相关操作,采用恰当的加权函数较大提高精度;基于小波变换的时延差估计等,其精度的提升都牺牲了计算时间。近年来,针对超短基线原有工作机制的精度和能耗缺陷,nicholas r.rypkema等人将超短基线定位技术与单程传播时间(oneway travel
‑
time,owtt)、时钟同步技术等相结合,达到对水下单、多目标进行高精度、低能耗定位目的[rypkeman r,fischell e m,
schmidt h.one
‑
way travel
‑
time invertedultra
‑
shortbaseline localization for low
‑
cost autonomous underwater vehicles[c]//ieeeinternational conference on robotics&automation.ieee,2017.]。其精度得到一定提升。
[0006]
目前,在阵列信号处理领域中,子空间技术是研究最多、应用最广泛的技术之一。阵列信号处理最主要的任务之一,是信号的波达方向(direction ofarrival,doa)估计。最早的基于阵列的doa估计算法为常规波束形成法(cbf),而后又出现了一些以capon 算法为代表的高分辨谱估计算法,这类算法较之cbf大大提高了分辨能力。之后又出现了以music为代表的噪声子空间类算法,和以旋转不变子空间(esprit)为代表的信号子空间算法。之后gounon等人将music算法推广到对宽带信号发射角和到达角的二维估计[gounon p,bozinoski s.high resolution spatio
‑
temporal analysis by an activearray[j].proceedings icassp ieee international conference onacoustics speech&signalprocessing,1995,5:3575
‑
3578.];对于方位角和俯仰角的二维估计,c.p.mathews等人在均匀圆阵下,使用波束形成将元素空间转换到波束空间进行谱峰函数的构造;而后jiang 等人提出了针对宽带相干信号分离的smoothing musical算法[jiang longyu,aulanierflorian,le touz e gr e.goire,et al.raypath separation with high resolution processing, ieee,2011.1
‑
5.]。他们均是按照圆阵和线阵的处理方式,根据阵列接收信号的统计特性来进行doa估计。而以music为代表的估计方法相对于esprit类方法具有更高的分辨力,方差更小,性能更优。超短基线的水下声源定位算法,与传统的doa估计方法有许多共同点。但是,超短基线水下声源的信号处理,是针对海洋信道传播中没有经过任何调制的宽带信号,同时信号和噪声的正交性不绝对满足。
[0007]
因此,本发明基于以music为代表的波达方向估计算法,提出了一种基于二维任意阵子空间的超短基线定位水下声源方法。通过设计超短基线的四元类十字阵列基阵结构,根据其阵元接收的chirp宽带信号进行阵列信号处理。对基于子空间类music算法进行改进,利用任意阵列响应矩阵的处理和二维空间谱的重新构造,使得其能够估计空间声源的俯仰角和方位角。而后针对其窄带限制和信号、噪声子空间正交性限制,利用相干信号子空间类方法,解决了海洋宽带信号空间定位精确度不足的问题。
技术实现要素:
[0008]
本发明的目的在于解决传统超短基线定位技术中定位精度存在的不足与限制,提出了一种基于二维任意阵子空间的超短基线定位水下声源方法,使得算法可以应用于浅海中的声源宽带信号处理,并能达到较高的定位精度。
[0009]
本发明是通过以下技术方案实现的:一种基于二维任意阵子空间的超短基线定位水下声源方法,包括以下步骤:
[0010]
步骤1:对水下滑翔机携带的超短基线的基阵进行设计,以正交形式将阵元均匀排列到坐标系的x轴和y轴上构成类十字排列的超短基线基阵,每个轴上的阵元数量为两个,对所述超短基线基阵上阵元接收到的声源信号进行阵列信号处理得到接收数据。
[0011]
步骤2:利用music算法,通过聚焦矩阵对步骤(1)中的接收数据进行聚焦变换,而后对变换后的输出构造协方差矩阵,并通过奇异值分解,形成信号子空间和噪声子空间。
[0012]
步骤3:根据步骤(2)得到的噪声子空间和二维阵列流形,得到二维角度的空间谱
函数,通过二维角度联合循环遍历索峰函数来搜索俯仰角和方位角的组合,空间谱估计函数中峰值对应的角度即为某一俯仰角和方位角组合估计。
[0013]
作为本发明的一种优选技术方案,在步骤1中,采用三个及以上的换能器装入一个部件中,构成排列超短基线基阵,并安装于水面的船体上,四个阵元排列成正交十字行式,阵元两两一组分布于x轴和y轴上,且采用任意阵模式来获取接收信号,同轴之间阵元间为d满足小于等于工作频率对应的半个波长。
[0014]
作为本发明的一种优选技术方案,所述超短基线基阵由两个正交的直线阵组成,分别置于x轴和y轴,其中超短基线基阵的中心为坐标原点,在此坐标系上,在此坐标系上,我们设目标位于s处,其坐标为[x,y,z]。取基阵坐标系为(x,y,z):
[0015]
其中,目标径矢为它的方向余弦为:
[0016][0017][0018][0019][0020]
上式中,θ
x
为径矢与x轴正半轴的夹角(弧度);θ
y
为径矢与y轴正半轴的夹角(弧度);θ
z
为径矢与z轴正半轴的夹角(弧度),也可称为俯仰角r为目标斜距(m)。
[0021]
为s在xoy平面上的投影,它与x轴的夹角θ为目标水平方位角。
[0022][0023][0024][0025]
上式中,r为目标水平斜距(m);z为目标深度(m),根据以上定位计算的基本公式,可知实际确定水下目标的相对坐标位置为[x,y,z],由公式(5)(6)(7)可知,对位置的解算可转化为对θ、和r的求解。根据公式(1)
‑
(7),直接通过改进music算法直接对方位角θ和俯仰角进行估计,然后通过三角变换,直接求解目标三维坐标。。
[0026]
作为本发明的一种优选技术方案,在步骤2中,假设信号源位于[x,y,z]处,相对于基阵原点的俯仰角和方位角分别为θ
i
,基阵结构为4个阵元构成的等距十字阵列,基阵中每一个阵元的输出信号模型可以表示为:
[0027][0028]
上式中,m=4代表有4个换能器组成的基阵结构,a
m
为阵列响应矢量对应第m 个传感器的向量。n
m
(t)为干扰信号和背景噪声在第m个传感器上的构成的附加噪声,在实际过程中,传感器阵列的所有阵元采样数据是同时的,所以在时刻t时,传感器阵列的接收数据可以写为:
[0029][0030]
其中,对于阵列响应矢量a而言,将其四元基阵按任意三维空间中的任意阵列处理。
[0031]
基阵结构的方向矩阵可以表示为:
[0032][0033][0034]
其中m指阵元数量,n指信号源数目,λ是波长。根据上述的阵列响应矢量,将其带入式(9),其信号模型可以以矩阵行式给出:
[0035]
x(t)=as(t)+n(t)
ꢀꢀꢀ
(12)
[0036]
这里,x(t)=[x1(t),x2(t),...,x
m
(t)]
t
为阵列输出矢量,a为方向矩阵,其中,其中,s(t)是源信号矢量,n(t)=[n1(t),n2(t),...,n
m
(t)]
t
为噪声矢量。通过对阵列输出进行采样,就可以获得定位处理需要的阵列输出信号x(t)。
[0037]
作为本发明的一种优选技术方案,采用相干信号子空间类算法对阵列输出信号x(t) 进行处理,通过聚焦变换,使宽带信号各频率分量的信号子空间“聚焦”到统一频率的信号子空间,再对各窄带的互谱密度矩阵进行频域平均来估计角度。其聚焦变换如下:
[0038]
t(f
j
)a(f
j
,θ)=a(f0,θ),(j=1,2,...,j)
ꢀꢀꢀ
(13)
[0039]
式中,f
j
为带宽内任意频率,j为信号在频域下的分段个数;f0为参考频率,即聚焦频率。则对应聚焦后的阵列输出为:
[0040][0041]
由上式可知聚焦变换后,各频率点下的方向矩阵所包含的频率信息相等。因此,可对聚焦后阵列各频率点的协方差矩阵求和平均。这里用于聚焦变换的矩阵使用旋转子空间聚焦矩阵构造。
[0042]
旋转子空间(rotation subspace,rss)聚焦矩阵算法,是使聚焦后的阵列响应矢量与参考频率点的阵列响应矢量间的误差最小,即
[0043][0044]
其中||
·
||
f
是frobenius范数。满足其约束最小化问题的最佳范数解为:
[0045]
t(f
i
)=v(f
i
)u
h
(f
i
)
ꢀꢀꢀ
(16)
[0046]
式中,u(f
i
)和u(f
i
)分别为矩阵a(f
i
,θ)a
h
(f0,θ)的左奇异矢量和右奇异矢量为列向量构成的矩阵。得到这个聚焦矩阵t(f
i
)后,将可以得到式(14)聚焦后的阵列输出。
[0047]
对其聚焦输出在各频率点下的协方差矩阵求和平均,得到:
[0048][0049]
式中,p
s
(f
j
)=s(f
j
)s
h
(f
j
);p
s
(f
j
)=s(f
j
)s
h
(f
j
)。对该协方差矩阵r
s
进行特征值分解得到特征值λ
i
(按降序排列)和对应的特征分量u
i
(i=1,2,...,m)。定义u
s
= [u1,u2,...,u
p
]、u
n
=[u
p+1
,u
p+2
,...,u
m
]的列矢量张成的空间分别为信号子空间和噪声子空间,则有a
h
(f0,θ)u
n
=0。根据此,可以得到该信号子空间的空间谱,进行角度估计。
[0050]
作为本发明的一种优选技术方案,所述步骤3中,由于a
h
(f0,θ)u
n
=0等式的成立,可以得到阵列空间谱函数,对一定范围内的角度进行遍历搜索,以此找到峰值对应的θ
′
。但该超短基线基阵下对声源定位分别需要俯仰角和方位角的角度才可对位置进行估计,而从步骤2中的csm类方法可以看到,算法的处理和传统doa估计一样,只针对单一波达方向角度进行。因此为修改空间谱估计函数为:
[0051][0052]
g(
·
)为给定不同俯仰角下遍历方位角θ
i
的阵列响应矢量。上式其峰值对应的角度即为某一俯仰角和方位角组合估计。
[0053]
与现有技术相比,本发明的有益效果为:
[0054]
(1)本发明将超短基线定位与子空间类算法music相结合,构建了一种基于二维任意阵子空间的超短基线水下声源定位方法。与现有技术相比,本发明的分辨率得到极大的提高。其三个维度的定位精度在10db信噪比时,针对水平范围5km以内,深度5km以内的声源,相对gcc和ism下的music算法,都有较准确的定位效果;
[0055]
(2)本发明方法可以在不同的信噪比条件下,以均方根误差小于其它对比算法的前提下,完成对声源位置的准确定位,相对于基于时延差的宽带信号定位,广义时延差gcc 算法,其定位误差大幅降低。在
‑
7db信噪比以上,本发明的定位精度已达到1%以下。
附图说明
[0056]
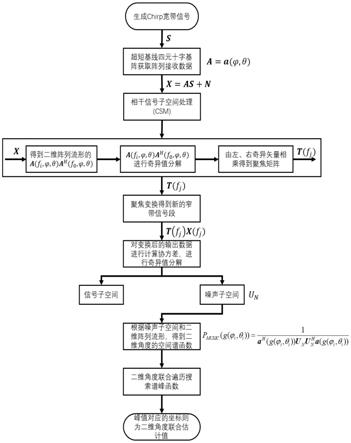
图1是本发明算法整体流程示意图;
[0057]
图2是本发明在不同位置上定位结果比较图;
[0058]
图3是本发明在不同信噪比下定位结果比较图。
具体实施方式
[0059]
如图1所示,为本发明提出的一种基于二维任意阵子空间的超短基线定位水下声源的方法流程图。首先,本发明的宽带信号使用chirp信号。其发射信号模型为:
[0060][0061]
其中,f
s
为起始频率,k是调频率,也称为频率变化率,为信号t时段内终止频率和起始频率的线性变化率:构造出chirp信号后,根据本发明所设计的超短基线基阵结构进行数据接收及采样。根据采样数据进行分段傅里叶变换后,使用技术方案中所设计的子空间类算法进行声源位置估计。其技术原理细节详述在技术方案中,算法步骤可总结如下:
[0062]
1.超短基线基阵结构设计后,利用水中声速和信号传播时间,计算其目标斜距;
[0063]
2.根据阵列接收信号的采样数据,使用旋转子空间算法,进行聚焦矩阵t(f
i
)构造;
[0064]
3.通过聚焦变换,利用其聚焦矩阵t(f
i
),使宽带信号各频率分量的信号子空间“聚焦”到同一频率的信号子空间;
[0065]
4.对各频率分量的信号子空间,计算聚焦后阵列各频率点的协方差矩阵;
[0066]
5.给定俯仰角开始遍历,在其对应角度下,进行协方差特征值分解,得到信号子空间u
s
和噪声子空间u
n
;
[0067]
6.根据噪声子空间,结合聚焦变换后的参考频率下的阵列响应矢量a(f0,θ),构造其空间谱函数;
[0068]
7.根据空间谱函数,遍历方位角θ
i
∈[0,360],其峰值对应的坐标则为对应的估计值利用第一步测量斜距,则可获得声源位置估计。
[0069]
上述算法步骤细节均在技术方案中进行描述,利用下述相关实验参数,可对本发明提出的一种基于二维任意阵子空间的超短基线水下声源定位方法进行算法实验分析。
[0070]
表1本发明实验参数描述表
[0071][0072]
实施例1:
[0073]
在图1的实验参数下,实例1使用来自不同x坐标、y坐标、z坐标分别组合的不同声源位置进行超短基线定位。其实施例的具体实验条件描述如下:
[0074]
来自x=[
‑
5000:2000:5000],y=[
‑
5000:2000:5000],z=[1000:1000:5000] 相互组合而成的180个位置发射的信号数据分别通过4个阵元组成的类十字基阵接收阵列接收,该180个位置的俯仰角和方位角度通过三角函数进行计算。传感器阵列上的附加噪声由这4个阵元上的高斯噪声(背景噪声)叠加构成。在信噪比为10db下进行实验。
[0075]
如图2所示,本实施例中将本发明与基于时延差的gcc算法,以及ism的music算法下的定位结果进行对比,可见本发明能够识别出所给出的每个位置。
[0076]
实施例2:
[0077]
在实例2中,对不同信噪比下的本发明定位精度进行实验分析,其位置固定为 (600,800,1000),对应的俯仰角和方位角分别为53.1301
°
和45
°
。对于定位精度的测量,以其估计值与理论值的差值与斜距的比值进行比较,分别为:δx/r,δy/r,δz/r。其在不同信噪比下(
‑
20db
‑
20db)的定位斜距精度如图3所示,可以看出本发明方法的定位精度均小于gcc算法,ism下的music算法这两个对比算法。取其实验部分信噪比对应下的估计位置如表2所示。
[0078]
表2本发明和传统技术的定位估计位置的对比
[0079][0080]
可以由表2看出,表2的对比方案中所有的方法在同一个信噪比条件下,本发明方法均优于其他两种方法,结合图3可以看出,在
‑
7db信噪比以上,根据定位斜距精度计算,其定位精度已达到斜距1%以下。表中z坐标出现1000,是因为角度搜索间隔设置过大,而本测试例俯仰角刚好为整数(45
°
)所致,后经将角度搜索间隔调小,获得了较高定位精度的z坐标。
[0081]
本发明提出了一种基于二维任意阵子空间的超短基线水下声源定位方法,具体实现该方案的方法途径有很多,以上所述仅为本发明的优选实施方案,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明的前提下,还可做出若干改进和润饰,这些改进和润饰也应当视为本发明的保护范围内。本实施例中为明确的部分均可用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1