一种水轮发电机转子磁极激光测距系统及方法与流程
1.本发明涉及水轮发电机转子磁极安装技术领域,具体涉及一种水轮发电机转子磁极激光测距系统及方法。
背景技术:
2.水电站发电是水流通过蜗壳的导流作用径向流入导水机构,将液体动能转化为静压能,再通过叶片将静压能转换为转子的动能。 转轮通过主轴与发电机转子联轴,带动转子磁极旋转并切割发电机定子铁芯的磁力线圈,利用电磁感应原理在发电机线圈中产生高压电,再经过变压器升压通过输电线路将电力输出到电网中。为了保证机组的运行安全,水电站每年会对机组进行检修,在机组大修时需要将所有的机械装置拆卸,并对机械装置进行检查、清洁。相关工作完成后组装的转子磁极位置易出现偏移或所有转子磁极同水轮发电机轴之间的距离出现差异(转子磁极与定子铁芯间的间隙不同,会造成主轴、转子磁极同定子铁芯三者非同圆心运行,极易造成安全事故)。
3.为保证主轴、转子磁极同定子铁芯三者在设计运行的范围内同圆心运行,目前检修人员将千分表安装在以水轮发电机轴为圆心、可根据水轮发电机轴旋转的支架上。当所有转子磁极恢复完成后,采用转动支架逐一测量千分表至转子磁极上、中、下的距离。此方式存在以下弊端及缺点:1、机组检修时,转子磁极离地面有一定的高度,测量一块转子磁极距离时需要频繁上、下梯子;最多的机组转子磁极数量有64块,故浪费人员及时间,也有安全隐患。
4.2、由于千分表的安装位置为固定,测量位置发生变化时,需要将千分表的表针取出;频繁取出和安装,表针的位置极易出现变化,对测量数据也有一定的影响。
5.3、千分表的数据为指针式,数据由人为读数;当读数人员和人员的视角方向变化时,读出的数据也存在差异。
6.4、人为读取的数据,人为记录,不利于归档存储,极易丢失。待后续检修时无法进行数据对比分析。
技术实现要素:
7.本发明针对现有技术中存在的技术问题,提供一种水轮发电机转子磁极激光测距系统及方法,能够减少检修人员的工作任务,规避频繁上下梯子的安全风险,精确转子磁极的距离数据,提高检修人员的工作效率,完善数据的记录和存档。
8.本发明解决上述技术问题的技术方案如下:一种水轮发电机转子磁极激光测距系统,其包括工控机、开关电源、无线串口服务器、蓄电池和若干激光传感器,所述无线串口服务器包括第一无线串口服务器和第二无线串口服务器;所述开关电源输入端接市电,并在其输出端输出24v直流电压,所述开关电源输出端与所述第一无线串口服务器输入端连接,所述工控机输出端连接于所述开关电源输出端与所述第一无线串口服务器的输入端之间;所述激光传感器用于检测水轮发电机转子磁极与激光传感器安装位的距离,所述激光传感
器分别与蓄电池连接,所述第二无线串口服务器与蓄电池连接,所述第一无线串口服务器与第二无线串口服务器通信连接,通过第二无线串口服务器将激光传感器的检测数据发送给第一无线串口服务器。
9.作为本发明的优选的,所述激光传感器至少有4个,每相邻两个激光传感器之间形成的夹角的大小相同。
10.作为本发明的优选的,所述激光传感器型号为hl
‑
g103。
11.作为本发明的优选的,所述开关电源与市电之间设有船型开关。
12.作为本发明的优选的,所述工控机与所述第一无线串口服务器之间设有转换器,所述转换器将rs232协议转化弄成rs485协议进行数据传输。
13.一种水轮发电机转子磁极激光测距方法,其包括:将至少4个激光传感器安装在用于安装水轮发电机转子磁极的旋转支架上,且激光传感器布置在水轮发电机转子磁极以外的四周,每相邻两个激光传感器之间形成的夹角相等,用于测量不同位置和方向上的激光传感器与转子磁极之间的距离,该激光传感器采集的实时数据通过第二无线串口服务器与第一无线串口服务器之间的通信,将激光传感器采集的实时数据发送至工控机进行查看对比,若存在激光传感器采集的实时数据不相等,则对水轮发电机转子磁极进行调整,以使得其调整到位,且所有激光传感器采集的实时数据相等。
14.本发明的有益效果是:本发明提供一种水轮发电机转子磁极激光测距系统及方法,能够减少检修人员的工作任务,规避频繁上下梯子的安全风险,精确转子磁极的距离数据,提高检修人员的工作效率,完善数据的记录和存档。
附图说明
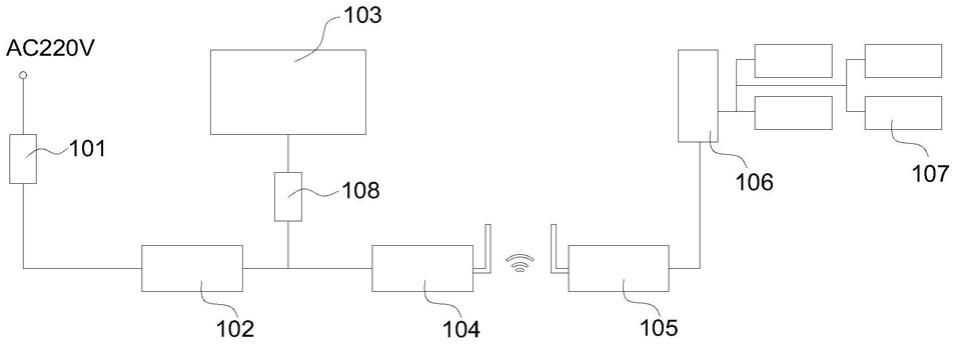
15.图1为本发明的原理框图。
16.其中,船型开关101、开关电源102、工控机103、第一无线串口服务器104、第二无线串口服务器105、蓄电池106、激光传感器107、转换器108。
具体实施方式
17.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
18.如图1所示,本实施例公开了一种水轮发电机转子磁极激光测距系统,其包括工控机103、开关电源102、无线串口服务器、蓄电池106和若干激光传感器107,所述无线串口服务器包括第一无线串口服务器104和第二无线串口服务器105;所述开关电源102输入端接市电,并在其输出端输出24v直流电压,所述开关电源102输出端与所述第一无线串口服务器104输入端连接,所述工控机103输出端连接于所述开关电源102输出端与所述第一无线串口服务器104的输入端之间;所述激光传感器107用于检测水轮发电机转子磁极与激光传感器107安装位的距离,所述激光传感器107分别与蓄电池106连接,所述第二无线串口服务器105与蓄电池106连接,所述第一无线串口服务器104与第二无线串口服务器105通信连接,通过第二无线串口服务器105将激光传感器107的检测数据发送给第一无线串口服务器104。
19.另外,在本实施例中,所述激光传感器107至少有4个,每相邻两个激光传感器107
之间形成的夹角的大小相同。所述激光传感器107型号为hl
‑
g103。所述开关电源102与市电之间设有船型开关101。所述工控机103与所述第一无线串口服务器104之间设有转换器108,所述转换器108将rs232协议转化弄成rs485协议进行数据传输。
20.一种水轮发电机转子磁极激光测距方法,其包括:将至少4个激光传感器107安装在用于安装水轮发电机转子磁极的旋转支架上,且激光传感器107布置在水轮发电机转子磁极以外的四周,每相邻两个激光传感器107之间形成的夹角相等,用于测量不同位置和方向上的激光传感器107与转子磁极之间的距离,该激光传感器107采集的实时数据通过第二无线串口服务器105与第一无线串口服务器104之间的通信,将激光传感器107采集的实时数据发送至工控机103进行查看对比,若存在激光传感器107采集的实时数据不相等,则对水轮发电机转子磁极进行调整,以使得其调整到位,且所有激光传感器107采集的实时数据相等。
21.在本实施例中,所述工控机103为ipc装置,其内部集成有kingview软件,用于激光传感器107的数据采集以及存储,并形成数据库及实时数据记录,支持数据记录和打印,开关电源102将市电220v交流转换成24v直流,为ipc装置和无线串口服务器提供电源,其中,无线串口服务器为wifi串口服务器。转换器108将rs232协议转换成rs485,满足ipc装置和无线串口服务器的信号连接。本实施例中的无线串口服务器用于建立无线wifi信号,具体的,实现第一无线串口服务器104和第二无线串口服务器105的连接,对激光传感器107的rs485协议数据进行传输。本实施例中的激光传感器107为红外激光感应传感器,其能够感应物体的位置,无需接触转子磁极表面,故而在数据测量完成后,即可旋转支架至下一个磁极位置。
22.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1