一种基于点云的地铁隧道限界检测方法与流程
1.本发明涉及隧道结构施工检测技术领域,具体的说是一种基于点云的地铁隧道限界检测方法。
背景技术:
2.地铁限界指限定地铁运行及轨道周围设施超越的轮廓线,分为车辆限界、设备限界和建筑限界。为确保列车在隧道内运行安全,隧道内需要有足够的空间;在限界内,除了地铁及与地铁相互作用的设备外,其他设施一律不得侵入。因而,对地铁限界进行监测分析是一项涉及地铁安全运行的重要工作。因此需要一种支持导入限界,如车厢外轮廓;支持在不同里程范围内设置不同的限界,灵活配付;支持输出不同指定里程或里程区间生成限界检测成果的隧道限界检测方法。
技术实现要素:
3.本发明要解决的技术问题是提供一种基于点云的地铁隧道限界检测方法,该方法能够自动检测指定里程或里程区间范围内轮廓线与隧道表面点云的相对位置关系,完成全线限界检测,并实现分析结果的二维视图显示,并支持检测结果输出限界检测结果表。
4.为解决上述技术问题,本发明采用的技术方案为:
5.一种基于点云的地铁隧道限界检测方法,其特征在于:具体步骤如下:
6.步骤1,获取隧道表面点云数据;
7.步骤2,提取或导入轨面中心线,导入需要检测使用的轮廓线,完成点云里程配付;
8.步骤3,将待检测隧道依据隧道曲率半径范围划分为若干里程区间,将不同的里程区间与对应的轮廓线相互匹配;
9.步骤4,以轨面中心作为轮廓线姿态旋转中心,以轨面中心线的旋转角度作为轮廓线的动态旋转角度;
10.步骤5,以设定间隔,按照射线法,判断每个点与轮廓线的位置关系,在检测轮廓线内即为侵界;
11.步骤6,在2d视图中显示限界检测成果;
12.步骤7,批量导出检测图表。
13.步骤1中隧道表面点云数据通过三维激光扫描设备在隧道内扫描获取。
14.步骤5中通过射线法计算每个里程区间内点云是否在检测轮廓线内,具体步骤如下:
15.以需要判断的隧道表面点向隧道一侧延伸形成射线,所述的射线与该射线所在的隧道结构截面内的轮廓线的交点数量为n,当n为偶数时,则该点不在轮廓线内,即为无侵限;当n为奇数时,则该在轮廓线内,即为存在侵限。
16.步骤5中所述的射线的延伸方向与隧道内轨道的轨面相互平行,所述的射线的延伸方向还与轨道的轨面中心线垂直。
17.步骤6中限界检测成果包括产生侵限的位置在对应成果图中标注侵限角度和长度;未产生侵限的位置在对应成果图中标注距离轮廓最近的位置和距离。
18.该种基于点云的地铁隧道限界检测方法能够达到的有益效果为:该方法能够分析海量点云数据不需要截取隧道断面,节省数据提取的时间。操作时指定任意里程或里程区间即可检测侵界情况,侵界则显示侵界角度和长度,没有侵界则显示距离轮廓最近的位置和距离。支持导入限界,在不同里程区间内配付不同车型、车厢外轮廓,设备轮廓或者建筑设备轮廓等计算侵界。
附图说明
19.图1为本发明一种基于点云的地铁隧道限界检测方法中未发生侵限时的侵界检测成果示意图。
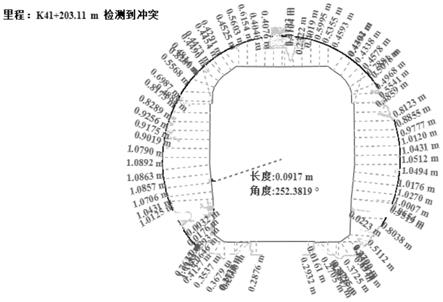
20.图2为本发明一种基于点云的地铁隧道限界检测方法中发生侵限时的侵界检测成果示意图。
21.图3为本发明一种基于点云的地铁隧道限界检测方法中射线法的检测示意图。
具体实施方式
22.以下结合说明书附图和具体优选的实施例对本发明作进一步描述。
23.一种基于点云的地铁隧道限界检测方法,其特征在于:具体步骤如下:
24.步骤1,获取隧道表面点云数据;
25.步骤2,提取或导入轨面中心线,导入需要检测使用的轮廓线,完成点云里程配付;
26.步骤3,将待检测隧道依据隧道曲率半径范围划分为若干里程区间,将不同的里程区间与对应的轮廓线相互匹配;
27.步骤4,以轨面中心作为轮廓线姿态旋转中心,以轨面中心线的旋转角度作为轮廓线的动态旋转角度;
28.步骤5,以设定间隔,按照射线法,判断每个点与轮廓线的位置关系,在检测轮廓线内即为侵界;
29.步骤6,在2d视图中显示限界检测成果;
30.步骤7,批量导出检测图表。
31.本实施例中,步骤1中隧道表面点云数据通过三维激光扫描设备在隧道内扫描获取。可采用静站扫描、标靶拼接的方式采集隧道结构点云,也可采用静站扫描和移动扫描的方式采集隧道结构点云,步骤4中所述的轨面中心线数据可直接导入或提取。
32.本实施例中,如图3所示,步骤5中通过射线法计算每个里程区间内点云是否在检测轮廓线内,具体步骤如下:
33.以需要判断的隧道表面点向隧道一侧延伸形成射线,所述的射线与该射线所在的隧道结构截面内的轮廓线的交点数量为n,当n为偶数时,则该点不在轮廓线内,即为无侵限;当n为奇数时,则该在轮廓线内,即为存在侵限。
34.步骤5中设定间隔按照0.01m的点云厚度逐步检测,实现对全部点云进行检测。
35.进一步的,步骤5中所述的射线的延伸方向与隧道内轨道的轨面相互平行,所述的射线的延伸方向还与轨道的轨面中心线垂直。
36.本实施例中,如图1和图2所示,步骤6中限界检测成果包括产生侵限的位置在对应成果图中标注侵限角度和长度;未产生侵限的位置在对应成果图中标注距离轮廓最近的位置和距离。
37.进一步的,步骤2和步骤3中,针对不同里程区间的设计要求、安全要求,使用的轮廓线在隧道内外区域、运行区域、所处地段类型等不同,使用的限界类型不同的轮廓线;例如在一般直线隧道区间内,采用车厢轮廓作为与直线隧道相互匹配的轮廓线,在转弯的隧道区间内,由于车厢轮廓会在转弯过程中发生一定量的偏移,需要在直线段限界模型的基础上添加平面几何加宽量,曲率半径不同,加宽量不同。一般情况曲率半径与加宽量的关系如下表1所示,
38.表1曲率半径与加宽量的关系表
39.定义r100r150r200r250r300r350r400r500曲线外侧(mm)2471651239982716249曲线内侧(mm)2051361028268585141定义r600r700r800r1000r1200r1500r2000r3000曲线外侧(mm)413531252117128曲线内侧(mm)342926201714107
40.该种基于点云的地铁隧道限界检测方法能够应用在轨道交通结构测量与病害检测系统的相关系统中,打开系统软件后,在进行形变分析和侵界检测前,使用三维激光扫描获取隧道点云数据,提取或者导入隧道轨面中心线;制作轮廓线并保存为规定格式文件,如车厢轮廓、设备轮廓、建筑轮廓等;
41.依次导入轮廓线,匹配轮廓和点云范围,配付开始里程和结束里程,以轨面中心为旋转中心,轨面旋转角度为旋转角度,计算所有位置轮廓姿态,判断轮廓与隧道表面点云的相对位置关系,生成侵界检测成果。
42.该种基于点云的地铁隧道限界检测方法能够设置检测段里程区间,自定义检测间隔,批量分析隧道点云限界检测状态,并为不同里程指定不同的限界检测轮廓。
43.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1