一种侧扫声呐的水下目标多模式成像方法
1.本发明属于水下目标探测与定位技术领域,具体地说,涉及一种侧扫声呐的水下目标多模式成像方法。
背景技术:
2.在专业海洋探测中,主要依赖声呐探测技术,侧扫声呐是常用设备之一,通过向海底主动发射声波信号,接收反射回来的声波信号,判断海底目标基本参数,从而绘制出海底地图。
3.侧扫声呐摆放有悬挂和拖曳式两种。其中,拖曳式侧扫声呐需要结合拖鱼,实施复杂且硬件成本高。同时,受船速、船向、水流速度和流向影响,这种作业方式决定了侧扫声呐的定位精度不是很高。悬挂式侧扫声呐,机械安装虽然简单,但不能根据实际情况进行调整并获取声纳准确姿态信息。因此,水下目标精确定位是目前侧扫作业中急需解决的问题,如何将清晰的水下图像与精确定位相结合是水下目标探测技术的关键。
4.传统的基于侧扫声呐进行目标定位方法是,侧扫声纳在工作时,侧扫声纳在垂直于航向方向形成两个窄波束,通过水下目标回波强度变化,来反应海底的地貌特征;在用于水下小目标检测时,该小目标回波产生的亮点和由于遮蔽引起的声阴影是用于水下目标检测的主要特征。但是,常规侧扫声纳在扫测时,形成的声图为一过式成像,容易受载体机械运动影响,从而造成或产生了目标声图畸变,检测率识别率低、无法实现对待测目标的探测的问题。
技术实现要素:
5.为解决现有技术存在的上述缺陷,本发明提出了一种侧扫声呐的水下目标多模式成像方法,该方法包括:
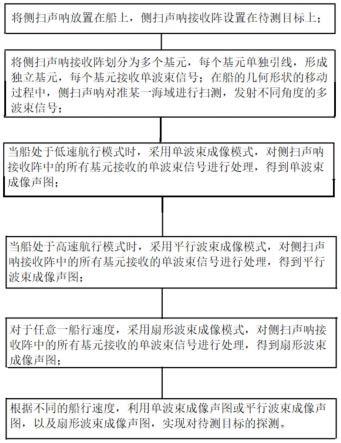
6.将侧扫声呐放置在船上,侧扫声呐接收阵设置在待测目标上;
7.将侧扫声呐接收阵划分为多个基元,每个基元单独引线,形成独立基元,每个基元接收单波束信号;在船的航行过程中,侧扫声呐对准某一海域进行扫测,发射不同角度的多波束信号;
8.当船处于低速航行模式时,采用单波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到单波束成像声图;
9.当船处于高速航行模式时,采用平行波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到平行波束成像声图;
10.在船的航行过程中,始终采用扇形波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到扇形波束成像声图。
11.作为上述技术方案的改进之一,所述方法还包括:根据不同的船行速度,首先通过单波束成像声图或平行波束成像声图,获得观测疑似目标结果,再通过扇形波束成像声图,获得目标精细观测结果,根据获取的观测疑似目标结果和目标精细观测结果,确定待测目
标在该海域中的位置,实现对待测目标的探测。
12.作为上述技术方案的改进之一,所述采用单波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到单波束成像声图;其具体过程为:
13.在侧扫声呐在船上进行几何形状的移动过程中,且船的航行速度小于4节的低速模式时,对侧扫声呐接收阵的所有基元接收到的单波束信号进行叠加和近场聚焦处理,得到波束数据beam0(t):
[0014][0015]
其中,i为基元序号,n为基元个数,
[0016]
其中,si(t)为第i个基元接收的单波束信号:
[0017][0018]
其中,a为第i个基元接收的单波束信号的信号幅度,f为第i个基元接收的单波束信号的信号频率,为接收信号相位;
[0019]
根据得到的beam0(t),绘制单波束成像声图。
[0020]
作为上述技术方案的改进之一,所述采用平行波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到平行波束成像声图;其具体过程为:
[0021]
在侧扫声呐在船上进行几何形状的移动过程中,且船的航行速度在4-12节的高速模式时,对侧扫声呐接收阵的所有基元接收到的基元域信号进行处理,得到平行波束域信号模型;
[0022]
x(t)=as(t)+n(t)
ꢀꢀꢀꢀ
(3)
[0023]
其中,x(t)为预成波束向量矩阵;a为侧扫声呐接收阵的所有基元组成的信号导向矢量矩阵;s(t)为侧扫声呐接收阵的所有基元组成的矩阵;n(t)为侧扫声呐接收阵的所有基元组成的噪声和干扰信号矩阵;
[0024]
其中,则信号的导向矢量
[0025]
其中,τn为第i个基元与参考基元之间接收信号的时延;f0为工作频率;j为虚单位;
[0026]
对于平行多波束导向角θs为扇形覆盖范围内的某一角度;θs=ζ,ζ∈(-θh,θh);
[0027]
当考虑简单的平行多波束,即每个波束的波束导向角度为0度时,且不考虑噪声和干扰信号n(t)的情况下,各个波束输出退化为若干个基元数据的累加,则公式(3)可以简化为:
[0028]
x(t)=as(t)
[0029]
其中,x(t)=[x1(t),x2(t),x3(t)...xj(t)];
[0030][0031]
其中,xj(t)为x(t)中的第j个预成波束向量;si(t)为第i个基元接收的单波束信号;
[0032]
根据得到的多个xj(t),绘制平行波束成像声图。
[0033]
作为上述技术方案的改进之一,所述采用扇形波束成像模式,对侧扫声呐接收阵中的所有基元接收的信号进行处理,得到高频扇形波束数据;其具体过程为:
[0034]
对侧扫声呐接收阵的所有基元接收到的基元域信号进行处理,得到扇形波束域信
号模型;
[0035]
x(t)1=a1s(t)1+n(t)1ꢀꢀꢀꢀ
(7)
[0036]
其中,x(t)1为扇形波束向量矩阵;a1为侧扫声呐接收阵的所有基元组成的扇形信号导向矢量矩阵;s(t)1为侧扫声呐接收阵的所有基元组成的扇形矩阵,即所有基元信号的复包络,cw信号或chirp信号;n(t)1为侧扫声呐接收阵的所有基元组成的噪声和干扰扇形信号矩阵;
[0037]
其中,信号的导向矢量
[0038]
在不考虑噪声和干扰扇形信号n(t)1的情况下,则公式(7)可以简化为:
[0039]
x(t)1=a1s(t)1[0040]
进而简化为:
[0041][0042]
其中,xm(t)为第m个基元的扇形波束向量;
[0043][0044]
其中,si(t)1为第i个基元接收的扇形波束信号;
[0045]
根据得到的多个扇形波束向量xm(t),绘制扇形波束成像声图。
[0046]
本发明与现有技术相比的有益效果是:
[0047]
1、常规侧扫声纳在水平方向上实现窄波束,通过拖体或载体的机械移动实现地貌或目标声图,容易受到机械运动的干扰,尤其在拖曳较绳短或者船载固定安装等情况下更容易受到风浪导致的晃动干扰,
[0048]
针对现有侧扫声纳的不足,本发明通过单波束、平行多波束和扇形多波束等多模成像方式,获取更加灵活的成像方式,通过扇形多波束成像获取不受机械干扰的目标成像效果。
[0049]
2、常规成像方法为一过式成像,即一次航迹只能获得目标的一幅有效声图,信息量有限,检测识别效果有限。
[0050]
针对现有侧扫声纳的不足,本发明通过具备单波束、平行多波束和扇形多波束等多模成像方式可以通过多帧间成像关联,获得更多的信息量,可以在完成目标粗检测之后辅助目标识别。
附图说明
[0051]
图1是本发明的一种侧扫声呐的水下目标多模式成像方法采用单波束成像模式的示意图;
[0052]
图2是本发明的一种侧扫声呐的水下目标多模式成像方法采用平行波束成像模式的示意图;
[0053]
图3是本发明的一种侧扫声呐的水下目标多模式成像方法采用扇形波束成像模式的示意图;
[0054]
图4是本发明的一种侧扫声呐的水下目标多模式成像方法的一个实施例中得到的单波束成像声图示意图;
[0055]
图5是本发明的一种侧扫声呐的水下目标多模式成像方法的一个实施例中得到的扇形波束成像声图示意图;
[0056]
图6是本发明的一种侧扫声呐的水下目标多模式成像方法的流程图。
具体实施方式
[0057]
现结合附图对本发明作进一步的描述。
[0058]
本发明提供了一种侧扫声呐的水下目标多模式成像方法,本发明的方法为了解决针对常规的侧扫声纳在扫测时,形成的声图为一过式成像,容易受载体机械运动影响,而且由于信息量有限,目标检测、识别能力受限的问题,采用多基元接收阵的设计,通过对各个阵元的信号充分利用,通过载体机械运动和阵列相控技术相结合,同时实现单波束成像、多平行波束成像和扇形波束成像的多模成像模式的多模成像探测,满足高速运动下、载体姿态变化剧烈条件下的高检测、识别性能。
[0059]
如图6所示,本发明提供了一种侧扫声呐的水下目标多模式成像方法,该方法具体包括:
[0060]
将侧扫声呐放置在船上,侧扫声呐接收阵设置在待测目标上;
[0061]
将侧扫声呐接收阵划分为多个基元,每个基元单独引线,形成独立基元,每个基元接收单波束信号;在船的航行过程中,侧扫声呐对准某一海域进行扫测,发射不同角度的多波束信号;
[0062]
当船处于低速航行模式时,采用单波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到单波束成像声图;
[0063]
具体地,如图1所示,在侧扫声呐在船上进行几何形状的移动过程中,且船的航行速度小于4节的低速模式时,对侧扫声呐接收阵的所有基元接收到的单波束信号进行叠加和近场聚焦处理,得到波束数据beam0(t):
[0064][0065]
其中,i为基元序号,n为基元个数,
[0066]
其中,si(t)为第i个基元接收的单波束信号:
[0067][0068]
其中,a为第i个基元接收的单波束信号的信号幅度,f为第i个基元接收的单波束信号的信号频率,为接收信号相位;
[0069]
根据得到的beam0(t),绘制单波束成像声图。
[0070]
当船处于高速航行模式时,采用平行波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到平行波束成像声图;
[0071]
具体地,如图2所示,在侧扫声呐在船上进行几何形状的移动过程中,且船的航行速度在4-12节的高速模式时,对侧扫声呐接收阵的所有基元接收到的基元域信号进行处理,得到平行波束域信号模型;
[0072]
x(t)=s(t)+n(t)
ꢀꢀꢀꢀ
(3)
[0073]
其中,x(t)为预成波束向量矩阵;a为侧扫声呐接收阵的所有基元组成的信号导向矢量矩阵;s(t)为侧扫声呐接收阵的所有基元组成的矩阵,即所有基元信号的复包络,cw信号或chirp信号;n(t)为侧扫声呐接收阵的所有基元组成的噪声和干扰信号矩阵;
[0074]
其中,侧扫声呐接收阵的所有基元组成的信号导向矢量矩阵a的推导过程如下:
[0075]
假设基元个数为n,n个基元均匀分布,且相邻基元之间的间距为d。
[0076]
由三角形余弦定理可得,以第s个基元为参考基元,则第n个基元与待测目标之间的距离为
[0077][0078]
其中,θs为平行多波束导向角;xn=(n-1)
×
d,其中,n=1,2,3,
…
,n,rs为第s个基元与待测目标之间的距离,则第i个基元与参考基元之间接收信号的时延为:
[0079][0080]
其中,c为水中声速;
[0081]
则信号的导向矢量
[0082]
其中,τn为第i个基元与参考基元之间接收信号的时延;f0为工作频率;j为虚单位。
[0083]
对于平行多波束导向角θs为扇形覆盖范围内的某一角度,即θs=ζ,ζ∈(-θh,θh),参考基元根据需求的波束数量,沿接收阵平均分布;其中,每个基元的接收信号时延在计算中,需要有个统一额参考,这个参考即为参考基元。
[0084]
当考虑简单的平行多波束,即每个波束的波束导向角度为0度时,且不考虑噪声和干扰信号n(t)的情况下,各个波束输出退化为若干个基元数据的累加,则公式(3)可以简化为:
[0085]
x(t)=as(t)
[0086]
其中,x(t)=[x1(t),x2(t),x3(t)...xj(t)];
[0087][0088]
其中,xj(t)为x(t)中的第j个预成波束向量;si(t)为第i个基元接收的单波束信号;
[0089]
根据得到的多个xj(t),绘制平行波束成像声图。
[0090]
在船的航行过程中,始终采用扇形波束成像模式,对侧扫声呐接收阵中的所有基元接收的单波束信号进行处理,得到扇形波束成像声图。
[0091]
具体地,如图3所示,对侧扫声呐接收阵的所有基元接收到的基元域信号进行处理,得到扇形波束域信号模型;
[0092]
x(t)1=a1s(t)1+n(t)1ꢀꢀꢀꢀ
(7)
[0093]
其中,x(t)1为扇形波束输出向量矩阵;a1为侧扫声呐接收阵的所有基元组成的扇形信号导向矢量矩阵;s(t)1为侧扫声呐接收阵的所有基元组成的扇形矩阵,即所有基元信号的复包络,cw信号或chirp信号;n(t)1为侧扫声呐接收阵的所有基元组成的噪声和干扰扇形信号矩阵;
[0094]
其中,侧扫声呐接收阵的所有基元组成的扇形信号导向矢量矩阵a1的推导过程如下:
[0095]
假设基元个数为n,n个基元均匀分布,且相邻基元之间的间距为d;
[0096]
由三角形余弦定理可得,以第s1个基元为参考基元,则第n个基元与待测目标之间的距离为
[0097][0098]
其中,θ
s1
为扇形多波束导向角;x
1n
=(n-1)
×
d;其中,n=1,2,3,
…
,n;r
s1
为第s1个基元与待测目标之间的距离,则第n个基元与参考基元之间接收信号的时延为:
[0099][0100]
其中,c为水中声速;
[0101]
则信号的导向矢量
[0102]
其中,τn为第n个基元与参考基元之间接收信号的时延;f0为工作频率;j为虚单位。
[0103]
例如,当考虑扇形波束开角为[-10
°
,10
°
],波束开角为1
°
,扇形波束导向角θ
s1
=-10
°
,-9
°
,-8
°
,...10
°
。
[0104]
在不考虑噪声和干扰扇形信号n(t)1的情况下,则公式(7)可以简化为:
[0105]
x(t)1=a1s(t)1[0106]
进而简化为:
[0107][0108]
其中,xm(t)为第m个基元的扇形波束向量;
[0109][0110]
其中,si(t)1为第i个基元接收的扇形波束信号;
[0111]
根据得到的多个扇形波束向量xm(t),绘制扇形波束成像声图。
[0112]
其中,所述方法还包括:根据不同的船行速度,首先通过单波束成像声图或平行波束成像声图,获得观测疑似目标结果,再通过扇形波束成像声图,获得目标精细观测结果,根据获取的观测疑似目标结果和目标精细观测结果,确定待测目标在该海域中的位置,实现对待测目标的探测。
[0113]
实施例1.
[0114]
本发明给出了一个具体的实施例,侧扫声纳基阵长度0.6m,基元数量36个,工作频率600khz,探测范围130m,航速小于4节,波束覆盖开角设计为-4度~4度。因为航速较小,根据船的航行速度为低速模式,则采用单波束成像模式和扇形多波束成像模式。
[0115]
其中,单波束采用基于近场聚焦的波束形成技术,波束导向角为0度;扇形多波束采用近场聚焦波束形成技术,波束导向角为-4度~4度,波束间隔0.2度。
[0116]
如图4所示,对于单波束成像模式,随着侧扫声纳的移动,在每个收发周期内,侧扫声纳接收阵获取一个单波束声纳波束域回波信号,将多帧获取的波束数据以瀑布图的形成显示在电脑屏幕上,就形成了单波束成像声图,并从该图上获取d、e、f三个点作为观测疑似
目标。
[0117]
如图5所示。对于扇形多波束成像模式,将每帧获取的扇形多波束的波束数据显示在电脑屏幕上,就形成了扇形波束成像声图,并从该图上获取a、b、c三个点作为精细观测目标。
[0118]
根据在声图上的亮点的强度,可以确定a和d为强度最亮的点,且位于相同位置,则将该位置对应的电作为待测目标,实现对待测目标的探测。采用本发明的探测方法后,获得了待测目标的多模成像模式,兼具机械运动带来的高分辨特性和扇形波束的灵活性,可以为后续检测识别降低虚惊率提供帮组。
[0119]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1