一种微弱目标的多帧相参积累检测方法
1.本发明属于雷达信号处理领域,特别涉及一种微弱目标检测技术。
背景技术:
2.近年来,微弱目标检测在雷达领域受到越来越多的关注。一方面,由于隐身技术的进步,雷达目标(包括陆地、海洋、空中和太空)的隐身能力越来越强;另一方面,能够探测到雷达回波较弱的小型目标也变得越来越重要,如游艇、潜望镜和无人机等。因此,如何提高对微弱目标的检测性能成为雷达信号处理研究的重要课题。
3.众所周知,通过对不同采样脉冲的长时间积累,可以显著提高雷达回波的信噪比和检测性能。然而,距离徙动在长时间积累中不可忽略,其会严重降低传统运动目标检测算法的性能。为了有效补偿距离徙动,实现帧内积累,carlson等引入hough变换(hough transform,ht),利用距离徙动积累运动目标的能量。然而,ht实际上是一种非相参积累方法,它不能补偿相位差,导致积累增益低,在低信噪比环境下不适用。perry等人提出了基于keystone变换的方法。然而,keystone变换可能会因为插值运算而遭受一些性能损失。xu等基于目标运动与距离徙动的耦合关系,提出了一种新的radon傅里叶变换(radon fourier transform,rft)来实现帧内相参积累。理论分析和仿真实验表明,radon傅里叶变换在不同信噪比背景下效果较好,有利于后续的目标检测操作。
4.除了上述的帧内积累方法,很多学者也研究了帧间积累方法。典型的帧间积累方法有动态规划(dp)等。dp方法在雷达检测中得到了较为普遍的应用。但是需要指出的是,这种帧间积累方法没有考虑目标的距离徙动,也没有考虑帧内积累。
技术实现要素:
5.为解决上述技术问题,本发明提出一种微弱目标的多帧相参积累检测方法,可以显著提升目标的信噪比和雷达的检测性能。
6.本发明采用的技术方案为:一种微弱目标的多帧相参积累检测方法,包括:
7.s1、雷达采用线性调频信号作为发射信号,观测期间雷达接收机总共接收到k帧回波,第k帧内雷达接收机接收到的基带信号为s
k
(t
m
,t),其中,k=1,2,...,k,t
m
为慢时间,t为快时间;
8.s2、对每一帧基带信号s
k
(t
m
,t)进行脉冲压缩;
9.s3、构造每一帧基带信号对应的相位补偿方程;
10.s4、根据各帧基带信号对应的相位补偿方程,得到各帧帧内的相参积累结果;
11.s5、在mrft域对k帧相参积累结果进行帧间信号处理,得到多帧相参积累结果;
12.s6、根据步骤s5的多帧相参积累结果进行目标检测。
13.本发明的有益效果:本发明的一种微弱目标的多帧积累检测方法,研究了距离走动下目标回波信号的帧内帧间联合长时间相参积累方法;首先,提出了改进rft(mrft)校正目标距离走动,以实现每一帧回波信号能量的帧内相参积累;随后针对mrft积累输出特性,
提出了mrft域的帧间积累方法以获得多帧信号能量的相参积累。通过帧内帧间的联合处理,可以显著提高目标的回波信噪比与雷达的检测性能。
附图说明
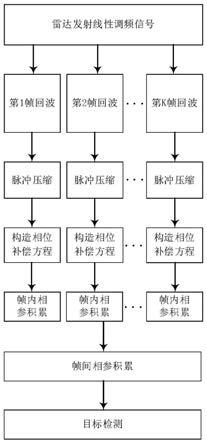
14.图1为本发明实施例的流程图;
15.图2为第1帧脉冲压缩回波mtd结果;
16.图3为第1帧脉冲压缩回波rft结果;
17.图4为2帧脉冲压缩回波联合相参积累结果;
18.图5为4帧脉冲压缩回波联合相参积累结果;
19.图6为6帧脉冲压缩回波联合相参积累结果;
20.图7为不同帧内帧间联合积累方法的检测曲线图。
具体实施方式
21.本发明采用matlab仿真实验的方法进行验证,在科学计算软件matlab r2019a上验证本发明的正确性和有效性。下面结合附图对本发明的实施例作进一步的说明。
22.请参阅图1,本发明提出了一种应用于微弱目标的多帧积累检测方法,具体通过以下流程实现:
23.步骤1,雷达采用线性调频信号作为发射信号,观测期间雷达接收机总共接收到k帧回波,第k帧内雷达接收机接收到的基带信号为s
k
(t
m
,t),其中,k=1,2,...,k,t
m
为慢时间,t为快时间。
24.本实例中采用的雷达参数设置为:载频f
c
=0.15ghz,带宽b=20mhz,采样频率f
s
=40mhz,脉冲重复频率f
p
=200hz,脉冲持续时间t
p
=5us,每帧脉冲数目n
a
=200。目标参数设置为:初始距离单元270,径向速度v
t
=150m/s,积累帧数k=6。
25.步骤2,对每一帧基带信号s
k
(t
m
,t)进行脉冲压缩,得到的信号为s
k
′
(t
m
,r),其中,r=ct/2。根据雷达系统的脉冲重复时间f
p
和距离采样频率f
s
,得到第k帧脉冲压缩后信号的离散形式s
k
′
(m,n)
[0026][0027]
其中,a
t
为脉压后的信号幅度,ρ
r
=c/2b为距离分辨率,c表示光速,b为带宽,n=round(r/δ
r
)为距离采样索引,round(
·
)表示四舍五入的整数运算,δ
r
=c/2f
s
,为对应目标初始径向距离r
0,t
的距离采样索引,n
g
为距离向上的采样点数。
[0028]
如图2所示为第1帧脉冲压缩回波mtd(moving targets detection动目标检测)结果,由于目标发生距离徙动,因此传统的mtd方法无法实现有效的相参积累。如图3所示为第1帧脉冲压缩回波rft结果,由于脉冲压缩后回波信号的信噪比较低,因此单帧的rft同样无法实现有效的相参积累。
[0029]
步骤3,构造相位补偿方程h
k
(i,q),
[0030][0031]
其中,i为距离搜索索引,q为速度搜索索引,k=1,2,...,k,k为观测期间雷达接收机总共接收到的回波数,t
r
为雷达脉冲重复周期,λ表示波长。根据待检测目标的相关先验信息,预设目标的径向距离r和速度v的搜索范围分别记为[r
min
,r
max
]、[v
min
,v
max
],r
min
是距离最小值,r
max
是距离最大值,v
min
是速度最小值,v
max
是速度最大值。
[0032]
径向距离和速度的搜索步长可分别设置为δ
r
=c/(2f
s
)以及δ
v
=c/(2t
f
),c表示光速,径向距离和速度的搜索数目分别为n
r
=round[(r
max
‑
r
min
)/δ
r
]和n
v
=round[(v
max
‑
v
min
)/δ
v
],round为四舍五入取整。
[0033]
步骤4,利用构造的相位补偿方程,得到关于第k帧脉冲压缩后信号s
k
′
(m,n)的修正rft算法公式g
k
(i,q)。
[0034][0035]
其中,i为距离搜索索引,q为速度搜索索引,i∈[1,n
r
],q∈[1,n
v
],k=1,2,...,k,k为观测期间雷达接收机总共接收到的回波数,δ
r
和δ
v
为径向距离和速度的搜索步长,m=1,2,
…
,n
a
,n
a
为每帧回波信号的脉冲数目,t
r
为雷达脉冲重复周期,round(
·
)表示四舍五入的整数运算。
[0036]
同时进行目标距离
‑
速度参数的二维联合搜索,完成对脉冲压缩后信号的处理,得到帧内的相参积累结果。
[0037]
步骤5,在mrft域对k帧脉冲压缩后信号的相参积累结果g
k
(i,q)进行帧间信号处理,距离搜索值为r(i),速度搜索值为v(q),其中,i为距离搜索索引,q为速度搜索索引,i∈[1,n
r
],q∈[1,n
v
]。首先通过初始化得到:
[0038]
i1(i,q)=g1(i,q)
[0039]
随后进行递归运算,对于2≤k≤k,1≤i≤n
r
,1≤q≤n
v
,进行如下操作
[0040]
i
k
(i,q)=g
k
(i,q)+[i
k
‑1(i
trans
,q
trans
)]
[0041]
其中,i
trans
=i
‑
round[v(q)
×
t
f
/δ
r
],q
trans
=q,t
f
为帧周期时间,δ
r
=c/(2f
s
),round为四舍五入取整。
[0042]
最终输出递归运算结果,即为多帧相参积累结果i
k
(
·
)。
[0043]
如图4所示为2帧脉冲压缩回波联合相参积累结果,如图5所示为4帧脉冲压缩回波联合相参积累结果,如图6所示为6帧脉冲压缩回波联合相参积累结果,随着积累帧数的增加,目标信号能量积累后的峰值逐渐突出。
[0044]
步骤6,根据得到的相参积累结果i
k
(
·
)完成目标的检测,当i
k
(
·
)中的峰值高于门限值时则判定目标存在。门限值表示为
[0045][0046]
其中,l为检测参考单元的个数,为噪声功率,erf
‑1(
·
)为反误差函数,p
fa
为虚警率。
[0047]
现有技术都没有同时考虑发生了距离走动目标的帧内与帧间的联合积累。为了对
比,本实施例组合使用现有的帧内积累方法(ht和rft)与帧间积累方法(dp),来对距离走动目标进行多帧积累处理,两种处理方法分别记为ht+dp、rft+dp,并完成这两种方法与本发明方法检测性能的对比,仿真结果如图7所示综上所述,图7中proposed代表本发明的方法,本领域技术人员,可容易看出本发明方法能够消除距离徙动以及低信噪比环境带来的影响,实现微弱目标的有效检测,提高雷达的检测性能。
[0048]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1