一种转镜装置以及激光雷达的制作方法
1.本发明专利涉及激光应用的技术领域,具体而言,涉及一种转镜装置以及激光雷达。
背景技术:
2.随着自动驾驶技术的发展,自动驾驶技术采用激光雷达对周边环境进行检测,其中激光雷达是通过发射激光束探测目标的位置、速度等特征量的雷达系统,具有精准度高、作业速度快和效率高等优势,可作为汽车自动驾驶、机器人定位导航、空间环境测绘、安保安防等领域必不可少的核心传感器。
3.目前,车用激光雷达中为满足覆盖较大范围的水平扫描视场角和垂直视场角采用转镜作为扫描部件,由一个或多个反射面的反射机构,和带动反射机构围绕中心旋转的电机组成。
4.现有技术中,转镜扫描系统由于电机绕轴按固定方向进行转动,与振镜的往返运动不同,所以中途无停顿,扫描速度较高,适用于需要高速扫描的场景,但在高速扫描过程中,随着电机旋转速度的提高,扫描光束的偏转角速率提高。由于激光雷达系统以激光发射时刻和激光接收时刻之间的时间差进行测距,而转镜扫描系统在工作过程中连续扫描无停顿,所以激光发射时刻和激光回波接收时刻转镜的指向必然存在差异,因此,在给定扫描速度的情况下,目标距离激光雷达系统越远,这个往返时刻的转镜指向角度差越大,由于收发时刻转镜指向角度存在差异,造成接收到的回波激光反射至光学系统聚焦面上的位置不同,严重时回波激光将偏离出光电接收器件的接收区,从而严重影响探测效率。
技术实现要素:
5.本发明的目的在于提供一种转镜装置以及激光雷达,旨在解决现有技术中激光转镜系统在高速扫描时,对远距离目标进行测距时,由于回波时刻相比发射时刻较长,在激光转镜系统的接收光学系统聚焦面上,以及转镜已旋转较大角度引起接收光学系统聚焦面的接收光斑偏移光电接收器件,引起接收效率降低的问题。
6.本发明是这样实现的,一种激光雷达的转镜装置,激光雷达包括激光发射器和激光接收器,所述转镜装置包括旋转件和反射组件,所述反射组件包括第一激光反射件和第二激光反射件,所述旋转件与反射组件连接并带动反射组件绕转轴转动,所述第一激光反射件的反射面与所述第二激光反射件的反射面以预设角度呈夹角相对设置,所述激光发射器发出的激光经过所述第一激光反射件向外反射,并经过所述第二激光反射件反射回激光接收器。
7.其中,优选的是,所述第一激光反射件或第二激光反射件上设置有角度旋转件,所述角度旋转件带动第一激光反射件或第二激光反射件旋转,以改变述第一激光反射件的反射面与所述第二激光反射件的反射面之间的预设角度α。
8.其中,优选的是,所述旋转件的旋转角速率为ω,所述转镜装置距离外部的物体的
距离为d,所述激光的速度为c,所述预设角度为α,所述预设角度的计算公式为α=2*d*ω/c。
9.其中,优选的是,所述第一激光反射件与所述第二激光反射件的边缘连接,所述第一激光反射件包括第一反射面,所述第二激光反射件包括第二反射面,所述第二反射面在所述第一反射面的平面上以预设角度往所述旋转件偏移设置。
10.其中,优选的是,所述旋转件包括运动旋转件以及角度旋转件,所述运动旋转件与所述第一激光反射件连接,所述角度旋转件与所述第二激光反射件连接,所述运动旋转件鱼所述角度旋转连接,且所述角度旋转件调制所述第二激光反射件的反射面与所述第一激光反射件的反射面之间的预设角度差。
11.其中,优选的是,所述转镜装置包括主控单元,所述主控单元控制所述运动旋转件与所述角度旋转件,以保持第一激光反射件与第二激光反射件的相邻边缘的角度差。
12.其中,优选的是,所述转镜装置还包括角度反馈件,所述角度反馈件用于获取所述激光在所述第一激光反射件上的出射角度,以供所述主控单元计算且控制所述角度旋转件的旋转速度。
13.其中,优选的是,所述转镜装置还包括第三激光反射件,所述第三激光反射件位于外部的激光收发器与第一激光反射件和第二激光反射件之间,以传导激光。
14.其中,优选的是,所述转镜装置还包括第三激光反射件,所述第三激光反射件位于所述第一激光反射件和第二激光反射件之外,所述激光经过所述第一激光反射件后,通过所述第三激光反射件传导至外部。
15.其中,优选的是,所述转镜装置还包括收发准直镜,所述收发准直镜包括第一准直镜以及第二准直镜,所述第一准直镜准直所述激光收发器发出的激光,所述第二准直镜准直传导至所述激光收发器的激光。
16.其中,优选的是,所述转镜装置包括固定架,所述固定架固定所述旋转件以及所述收发准直镜。
17.第二方面,本实用新型提供一种激光雷达,包括如上所述的一种转镜装置以及激光收发器,所述激光收发器与所述转镜装置连接,所述激光收发器发送激光经过所述转镜装置,且所述转镜装置将反射的激光传导至所述激光收发器。
18.与现有技术相比,本发明提供的一种转镜装置以及激光雷达,通过设置存在角度差的第一激光反射件以及第二激光反射件,当转镜装置用于高速旋转扫描时,可以利用第一激光反射件与第二激光反射件的角度差实现对激光收发的偏移进行补偿,实现补偿激光的收发时间差引起的光轴偏移的目的,从而有效提高远距离目标在高速旋转扫描状态下的回波激光检测效率。
附图说明
19.下面将结合附图及实施例对本发明作进一步说明,附图中:
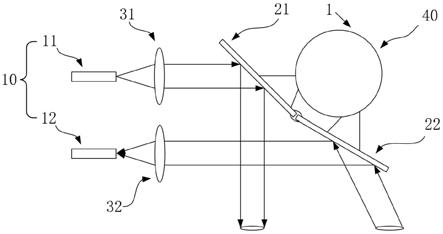
20.图1是本发明实施例提供的激光雷达的俯视示意图;
21.图2是本发明实施例提供的转镜装置的侧视示意图;
22.图3是图2的a
‑
a剖视示意图;
23.图4是本发明实施例提供的激光雷达的侧视示意图;
24.图5是本发明实施例提供的激光雷达的俯视示意图;
25.图6是本发明实施例提供的激光雷达的俯视示意图;
26.图7是本发明实施例提供的激光雷达的侧视示意图。
具体实施方式
27.现结合附图,对本发明的实施例作详细说明。
28.如图1及图3所示,为本发明提供的一种转镜装置的优选实施例。
29.一种激光雷达的转镜装置1,激光雷达包括激光收发器10,其中激光收发器包括激光发射器11以及激光接收器12,包括旋转件40和反射组件20,反射组件20包括第一激光反射件21和第二激光反射件22,旋转件40与反射组件20连接并带动反射组件20绕转轴转动,,第一激光反射件21的反射面与第二激光反射件22的反射面以预设角度呈夹角相对设置,激光发射器11发出的激光经过第一激光反射件21向外反射,并经过第二激光反射件22反射回激光接收器12;通过设置存在角度差的第一激光反射件21以及第二激光反射件22,当转镜装置1用于高速旋转扫描时,可以利用第一激光反射件21与第二激光反射件22的角度差实现对激光收发的偏移进行补偿,实现补偿激光的收发时间差引起的光轴偏移的目的,从而有效提高远距离目标在高速旋转扫描状态下的回波激光检测效率;本实施例中,旋转件40连接第一激光反射件21以及第二激光反射件22,激光发射器11发射激光,激光接收器12接收激光。
30.具体地,第一激光反射件21或第二激光反射件22上设置有角度旋转件42,角度旋转件42带动第一激光反射件21或第二激光反射件22旋转,以改变述第一激光反射件21的反射面211与第二激光反射件22的反射面221之间的预设角度α,其中旋转件40的旋转角速率为ω,转镜装置1距离外部的物体的距离为d,激光的速度为c,预设角度为α,预设角度的计算公式为α=2*d*ω/c,通过设置预设角度,第一激光反射件21与第二激光反射件22随着旋转件40进行旋转时,第一激光反射件21的反射面与第二激光反射件22的反射面先后被旋转至反射激光发射器11发射的激光或反射激光至激光接收器12,具体地,激光分别经过第一激光反射件21的反射面发射到外部的物品上,激光在物体表面反射后,再反射到第二激光反射件22的反射面上,而后反射回到激光接收器12;其中第二激光反射件22滞后第一激光反射件21一个小的偏转角运动,这样,当第二激光反射件22旋转至原第二激光反射件22所在的位置时,在物体表面反射的激光正好抵达第二激光反射件22,可以以原来的入射角以及出射角往激光接收器12发射,从而避免了原来一体式激光反射镜会出现的角度误差的问题。
31.本实施例中,第一激光反射件21与第二激光反射件22的边缘连接,第一激光反射件21包括第一反射面211,第二激光反射件22包括第二反射面221,第二反射面221在第一反射面211的平面上以预设角度往旋转件40偏移设置,具体地,预设角度α可以根据激光反射获取的距离d作计算,采用平均值获取对应的预设角度,从而实现更好的预设角度设置;进一步地,第二反射面221与第一反射面211之间呈预设角度交叉设置。
32.如图2至图5所示,为本发明提供的一种转镜装置1的较佳实施例。
33.旋转件40包括运动旋转件41以及角度旋转件42,运动旋转件41与第一激光反射件21连接,角度旋转件42与第二激光反射件22连接,运动旋转件41与角度旋转件42旋转连接,
且角度旋转件42调制第二激光反射件22的反射面221与第一激光反射件21的反射面211之间的预设角度α差;具体地,第一激光反射件21与第二激光反射件22之间差速连接,差速连接指的是运动旋转件41与角度旋转件42之间安装微型电机实现差速驱动或者安装齿轮来连接运动旋转件41以及角度旋转件42,运动旋转件41与角度旋转件42之间的旋转存在速度差或者时间差,具体地,运动旋转件41与角度旋转件42的旋转方向是一致的,当运动旋转件41是以逆时针旋转时,角度旋转件42也是逆时针旋转,且角度旋转件42的旋转速度落后于运动旋转件41的旋转速度,或与运动旋转件41的旋转开始时间与角度旋转件42的旋转开始时间不一致,利用运动旋转件41与角度旋转件42之间先后旋转的时间差或者运动旋转件41与角度旋转件42的旋转速度差,从而实现先后的旋转,从而分别带动第一激光反射件21以及第二激光反射件22先后旋转至反射激光的位置进行反射。
34.本实施例中,转镜装置1包括主控单元,主控单元控制运动旋转件41与角度旋转件42,以保持第一激光反射件21与第二激光反射件22的相邻边缘的角度差,可以用于控制运动旋转件41与角度旋转件42的旋转速度,十分方便;转镜装置1还包括角度反馈件,角度反馈件用于获取激光在第一激光反射件21上的出射角度,以供主控单元计算且控制角度旋转件42的旋转速度,可以实现实时调整运动旋转件41与角度旋转件42之间的角度差,当运动旋转件41反射出去时,角度反馈件将此时的角度设置为基础的角度,而后再根据第一次以及第二次的激光反射回来的角度、速度以及时间计算对应的新的角度差,通过将两次的角度差反馈到主控单元中,从而驱使主控单元控制角度旋转件42的旋转速度变快或者变慢,从而起到实时调控的目的。
35.如图6所示,为本发明提供的一种转镜装置1的较佳实施例。
36.转镜装置1还包括第三激光反射件50,第三激光反射件50位于外部的激光收发器10与第一激光反射件21和第二激光反射件22之间,以传导激光,利用第三激光反射件50进一步降低反射激光的路线偏移率,当回波激光先经过第二激光反射件22反射,再经过第三激光反射件50进行反射时,第三激光反射件50将回波的激光再一次整合,且往原来的路径上偏移,当回波激光抵达激光接收器12时,回波激光不会超出激光接收器12的接收范围。
37.如图1、图3至图7所示,为本发明提供的一种转镜装置1的较佳实施例。
38.转镜装置1还包括收发准直镜30,收发准直镜30准直激光收发器10发出或接收的激光,以扩散传导或汇聚检测,利用准直镜可以将回波激光准直到激光接收器12上。
39.具体地,收发准直镜30包括第一准直镜31以及第二准直镜32,第一准直镜31准直激光收发器10发出的激光,第二准直镜32准直传导至激光收发器10的激光,通过设置分别的第一准直镜31以及第二准直镜32,可以分别对激光发射器11发出的激光进行准直,也可以对发射至激光接收器12的激光进行准直,可以根据实际的情况采取不同的曲率的准直镜,十分方便。
40.如图1、图3至图7所示,为本发明提供的一种激光雷达的较佳实施例。
41.一种激光雷达,一种激光雷达,包括如上的一种转镜装置1以及激光收发器10,激光收发器10与转镜装置1连接,激光收发器10发送激光经过转镜装置1,且转镜装置1将反射的激光传导至激光收发器10,利用激光收发器10发生激光经过转镜装置1,往外部传输,且转镜装置1反射回波激光到激光收发器10,从而判断外部的物体离激光雷达的距离,从而可以起到预警的作用。
42.未在附图中显示的还有本发明提供的一种转镜装置1的较佳实施例。
43.旋转件40与第一激光反射件21连接,第一激光反射件21与第二反射件22连接,当第一激光反射件21被旋转件40带动旋转时,第一激光反射件21带动第二激光反射件22转动。未在附图中显示的还有本发明提供的一种转镜装置1的较佳实施例。
44.转镜装置1还包括第三激光反射件50,第三激光反射件50位于第一激光反射件21和第二激光反射件22之外,激光经过第一激光反射件21后,通过第三激光反射件50传导至外部,第三激光反射件50进一步降低反射激光的路线偏移率,当回波激光先经过第三激光反射件50反射,再经过第二激光反射件22进行反射时,第三激光反射件50将回波的激光整合,且往原来的路径上偏移,当回波激光抵达激光接收器12时,回波激光不会超出激光接收器12的接收范围。
45.未在附图中显示的还有,转镜装置1包括固定架,固定架固定旋转件40以及收发准直镜30。
46.未在附图中显示的还有本发明提供的一种自动驾驶系统的较佳实施例。
47.一种自动驾驶系统,包括如上的激光雷达、控制单元以及汽车,控制单元基于激光雷达的检测信息,控制汽车运行,利用激光雷达可以实现检测汽车外的物体的远近距离,从而驱使控制单元控制汽车的自动避让或者减速,十分方便。
48.此外,以上内容中所标注的第一、第二等序列名词并非是限定物体之间的先后顺序,仅用作标识性用语,具体的物体布置位置以及空间关系受文本中的方位限定。
49.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1