一种毫米波雷达角度超分辨方法与流程
1.本发明属于雷达技术领域,尤其涉及一种毫米波雷达角度超分辨方法。
背景技术:
2.近年来,车载毫米波雷达的应用范围大幅度拓展,毫米波雷达在盲区报警、倒车警告以及辅助驾驶等方面应用较为广泛。然而受限于车载雷达的尺寸、功率、天线设计等问题,车载毫米波雷达在在长距离模式下,无法有效区分出相同径向距离下,切向距离相近、速度相近的多个目标,从而导致了雷达的角分辨率下降,影响雷达性能。常用的music算法形成的空间谱主瓣较大,容易掩盖角度相近的两个目标,对角分辨率的提高有限。因此需要对算法进行优化,以提高毫米波雷达的角分辨率。
技术实现要素:
3.有鉴于此,本专利提出一种毫米波雷达角度超分辨方法,对雷达回波adc信号进行采集与距离fft处理,得到一维距离相序列,并处理得到噪声协方差矩阵。然后对协方差矩阵进行复共轭变换后,与原协方差矩阵进行相加,得到新的协方差矩阵。对协方差矩阵进行奇异值分解,得到特征值向量。对特征值向量进行区分操作,得到信号和噪声子空间。通过对信号子空间进行广义逆变换、对噪声子空间进行特征向量加权等操作得到空间谱函数。最后结合角度范围与空间谱函数,通过寻求峰值来得到到达角的估计值。
4.本发明公开的一种毫米波雷达角度超分辨方法,方法包括以下步骤:对毫米波雷达回波信号进行adc数据采集,得到采样数据;对所述采样数据进行一维fft处理,得到距离相序列,并处理得到第一信号协方差矩阵;对所述第一信号协方差矩阵进行复共轭运算后与所述第一信号协方差矩阵进行相加,重构得到第二信号协方差矩阵;对所述第二信号协方差矩阵进行奇异值分解,根据特征值向量将所述第二信号协方差矩阵分解为信号和噪声子空间矩阵,并求得权值向量;利用所述权值向量重构噪声子空间矩阵,利用广义逆矩阵处理信号子空间矩阵;利用所述子空间矩阵构成空间谱密度函数方程;遍历角度寻找峰值以估算角度。
5.进一步的,所述对所述第一信号协方差矩阵进行复共轭运算后与所述第一信号协方差矩阵进行相加,重构得到第二信号协方差矩阵的步骤包含以下计算过程:所述第一信号协方差矩阵为r
xx
,定义交换矩阵:;构造互协方差矩阵r
yy
=j r
xx j
h
, j
h
为所述交换矩阵j的共轭转置,重构的第二信
号协方差矩阵为:r=。
6.进一步的,所述根据特征值向量将所述第二信号协方差矩阵分解为信号和噪声子空间矩阵,并求得权值向量的计算过程为:对特征矩阵进行奇异值分解:r=usv,其中,s为特征值对角矩阵,u为特征向量构成的矩阵,特征值由大到小排列为,对应的特征值向量为:u=(q1,q2...q
n
);已知阵元数为n,信源数为m,取前m大的特征值构成信号子空间特征值对角矩阵: ,取后(n
‑
m)大的特征值构成噪声子空间特征值对角矩阵:,信号子空间为对应的前m个特征向量扩展成的矩阵: =span(q1...q
m
);噪声子空间为对应的后(n
‑
m)个特征向量扩展成的矩阵: = span(q
m+1
...q
n
);噪声子空间对应的特征值向量为:,权值向量为:w=。
7.进一步的,所述利用所述权值向量重构噪声子空间矩阵,利用广义逆矩阵处理信号子空间矩阵的计算步骤如下:信号子空间对应的特征值向量如下:;重构后的信号子空间矩阵为:;重构后的噪声子空间矩阵为: ,其中是的共轭转置矩阵。
8.进一步的,所述空间谱密度函数的计算步骤如下:阵列导向矩阵为,则阵列导向矢量为: ,为对应的角度系数;谱密度函数为: ,其中是雷达视场里的角度,是的共轭转置。
9.本发明的有益效果:毫米波雷达通过软件方法进行改进,不增加硬件成本,不需要通过提高发射功率去提高目标检测准确率,具有稳定的探测性能与良好的环境适应性,结构简单、发射功率低、分辨率与灵敏度高、雷达尺寸小。
10.通过对信号子空间进行特征重构的方式优化了music算法,构造了新的空间谱函数,极大的提高了远距离下毫米波雷达的雷达角分辨率,使得毫米波雷达可以更好的在远距离下区分目标。
附图说明
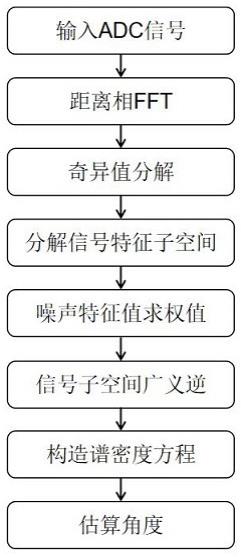
11.图1为本发明改进music算法的毫米波雷达角度超分辨方法流程图;图2为本发明改进music算法的毫米波雷达角度超分辨方法区分结果。
具体实施方式
12.下面结合附图对本发明作进一步的说明,但不以任何方式对本发明加以限制,基于本发明教导所作的任何变换或替换,均属于本发明的保护范围。
13.本发明的目的是找到一种方法,使得空间谱主瓣减小,提高角分辨率。
14.有鉴于此,本发明提出一种毫米波雷达角度超分辨方法,对雷达回波adc信号进行采集与距离fft处理,得到一维距离相序列,并处理得到噪声协方差矩阵。然后对协方差矩阵进行复共轭变换后,与原协方差矩阵进行相加,得到新的协方差矩阵。对协方差矩阵进行奇异值分解,得到特征值向量。对特征值向量进行区分操作,得到信号和噪声子空间。通过对信号子空间进行广义逆变换、对噪声子空间进行特征向量加权等操作得到空间谱函数。最后结合角度范围与空间谱函数,通过寻求峰值来得到到达角的估计值。
15.如图1所示,本发明公开的一种毫米波雷达角度超分辨方法,方法包括以下步骤:s10:对毫米波雷达回波信号进行adc数据采集,得到采样数据;s20:对采样数据进行一维fft处理,得到距离相序列,并处理得到第一信号协方差矩阵;s30:对第一信号协方差矩阵进行复共轭运算后与第一信号协方差矩阵进行相加,重构得到第二信号协方差矩阵;第一信号协方差矩阵为r
xx
,定义交换矩阵:;构造互协方差矩阵r
yy
=j r
xx j
h
, j
h
为所述交换矩阵j的共轭转置,重构的第二信号协方差矩阵为:r=。
16.s40:对第二信号协方差矩阵进行奇异值分解,根据特征值向量将第二信号协方差矩阵分解为信号和噪声子空间矩阵,并求得权值向量;对特征矩阵进行奇异值分解:r=usv,其中,s为特征值对角矩阵,u为特征向量构成的矩阵,特征值由大到小排列为,对应的特征值向量为:u=(q1,q2...q
n
);已知阵元数为n,信源数为m,取前m大的特征值构成信号子空间特征值对角矩阵: ,取后(n
‑
m)大的特征值构成噪声子空间特征值对角矩阵:,信号子空间为对应的前m个特征向量扩展成的矩阵: =span(q1...q
m
);噪声子空间为对应的后(n
‑
m)个特征向量扩展成的矩阵: = span(q
m+1
...q
n
);噪声子空间对应的特征值向量为:,权值向量为:w=。
17.s50:利用权值向量重构噪声子空间矩阵,利用广义逆矩阵处理信号子空间矩阵;
信号子空间对应的特征值向量如下:;重构后的信号子空间矩阵为:;重构后的噪声子空间矩阵为: ,其中是的共轭转置矩阵。
18.s60:利用子空间矩阵构成空间谱密度函数方程;阵列导向矩阵为,则阵列导向矢量为: ,为对应的角度系数;谱密度函数为: ,其中是雷达视场里的角度,是的共轭转置。
19.s70:遍历角度寻找峰值以估算角度。
20.根据上述实施例的方法研制样机进行试验验证,试验结果如图2所示,本发明改进music算法的毫米波雷达角度超分辨方法相对于传统的music算法,空间谱主瓣明显减小,显著提高了角分辨率。
21.本发明的有益效果:毫米波雷达通过软件方法进行改进,不增加硬件成本,不需要通过提高发射功率去提高目标检测准确率,具有稳定的探测性能与良好的环境适应性,结构简单、发射功率低、分辨率与灵敏度高、雷达尺寸小。
22.通过对信号子空间进行特征重构的方式优化了music算法,构造了新的空间谱函数,极大的提高了远距离下毫米波雷达的雷达角分辨率,使得毫米波雷达可以更好的在远距离下区分目标。
23.上述实施例为本发明的一种实施方式,但本发明的实施方式并不受所述实施例的限制,其他的任何背离本发明的精神实质与原理下所做的改变、修饰、代替、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1