受电弓运行状态监测控制系统的制作方法
1.本发明涉及一种轨道交通车辆用受电弓技术,尤其涉及一种受电弓运行状态监测控制系统。
背景技术:
2.受电弓是电力牵引机车从接触网取得电能的电气设备,安装在机车或动车车顶。受电弓的运行状态直接影响列车的运行情况。
3.现有技术中,车辆通常设置单一可见光摄像头进行运行状态监测,此种方案不具备图像识别功能,需依靠随车机械师对受电弓状态进行判断,且在恶劣环境下肉眼无法识别受电弓轮廓。
技术实现要素:
4.本发明的目的是提供一种受电弓运行状态监测控制系统。
5.本发明的目的是通过以下技术方案实现的:
6.本发明的受电弓运行状态监测控制系统,包括:
7.设置于轨道交通车辆上的视觉监测模块,用于在所述轨道交通车辆运行过程中智能监测受电弓运行状态;
8.设置于轨道交通车辆内部并与所述视觉监测模块实时通讯的主动控制系统,用于接收视觉监测模块采集并处理分析后的图像信息,在出现异常情况时发出警告,严重异常时操控受电弓自动降下;
9.所述视觉监测模块采集到图像信息后,对图像信息进行分析判断,确认受电弓运行状态;
10.当识别到有故障出现时,主动控制系统根据故障严重程度进行处理,向车辆侧发送故障警告或操控受电弓自动降下。
11.由上述本发明提供的技术方案可以看出,本发明实施例提供的受电弓运行状态监测控制系统,使用红外摄像头、高清摄像头、紫外摄像头集合而成的一体化视觉监测模块,将视觉监测模块采集到的图像处理后进行故障识别,与主动控制系统传感器数据结合,对达到设定阈值的异常现象进行警告或控制受电弓自动降下,在不使用人力的情况下对所有工况下的受电弓运行状态进行智能监测。
附图说明
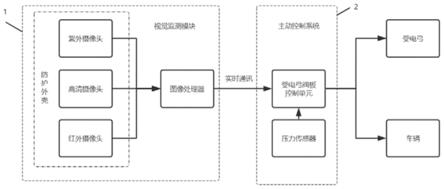
12.图1为本发明实施例提供的受电弓运行状态监测控制系统的结构示意图;
13.图2为本发明实施例提供的受电弓运行状态监测控制系统的工作流程示意图。
具体实施方式
14.下面将对本发明实施例作进一步地详细描述。本发明实施例中未作详细描述的内
容属于本领域专业技术人员公知的现有技术。
15.本发明的受电弓运行状态监测控制系统,其较佳的具体实施方式是:
16.包括:
17.设置于轨道交通车辆上的视觉监测模块,用于在所述轨道交通车辆运行过程中智能监测受电弓运行状态;
18.设置于轨道交通车辆内部并与所述视觉监测模块实时通讯的主动控制系统,用于接收视觉监测模块采集并处理分析后的图像信息,在出现异常情况时发出警告,严重异常时操控受电弓自动降下;
19.所述视觉监测模块采集到图像信息后,对图像信息进行分析判断,确认受电弓运行状态;
20.当识别到有故障出现时,主动控制系统根据故障严重程度进行处理,向车辆侧发送故障警告或操控受电弓自动降下。
21.所述视觉监测模块包括:
22.架设于轨道交通车辆顶部的紫外摄像头、高清摄像头、红外摄像头,用于采集所述受电弓运行时的图像;
23.布置于轨道交通车辆内部的图像处理器,用于处理分析采集到的所述受电弓运行时的图像;
24.所述图像处理器与所述主动控制系统实时通讯。
25.所述主动控制系统包括:
26.布置于所述轨道交通车辆内部的受电弓阀板控制单元,用于向车辆侧发送故障警告或直接控制受电弓降下,所述受电弓阀板控制单元有日志记录功能,该功能在控制单元上电全周期内工作,当出现故障时记录故障信息,无故障出现时进行常态记录;
27.布置于所述轨道交通车辆内部的压力传感器,用于测量受电弓气囊入口处气压。
28.所述紫外摄像头、高清摄像头、红外摄像头使用防护外壳进行封装集成。
29.该系统的控制过程为:
30.基于所述视觉监测模块采集并处理的图像信息、主动控制系统的压力传感器数值,对受电弓运行状态进行判断,对于未达到设定阈值的轻故障,向车辆侧发送故障警告;对于达到设定阈值的严重故障,直接调控受电弓气压使其自动降下。
31.本发明的受电弓运行状态监测控制系统,可以通过视觉监测模块采集并处理的受电弓运行图像,实时采集运行中的受电弓图像,结合主动控制系统传感器数据及视觉监测模块图像分析结果对受电弓运行状态进行判断,当发现受电弓运行状态出现异常时,发出异常警告,严重异常时操控受电弓自动降下,从而实现在不使用人力的情况下对受电弓运行状态进行智能监测的目的。可以监测受电弓的运行状态,在出现异常时向车辆侧告警,严重时控制受电弓自动降下,保护接触网及列车运行安全。
32.具体实施例:
33.本发明的一种典型实施方式,如图1所示,提出一种受电弓的状态监测方式、视觉监测模块及主动控制系统,其包括视觉监测模块1和主动控制系统2。
34.其中,视觉监测模块1用于采集并处理受电弓的图像信息,并将信息实时传送给主动控制系统2,主动控制系统2结合内部压力传感器信息判断受电弓运行状态,根据故障等
级向车辆侧告警或直接控制受电弓自动降下。
35.在一些实施方案中,定义上臂不足30mm的左右偏移为轻故障;定义上臂超过30mm的左右偏移为严重故障;
36.在一些实施方案中,定义受电弓主体结构变形为严重故障;定义受电弓结构丢失为严重故障;定义弓角断裂为严重故障;定义碳滑板变形为严重故障;
37.在一些实施方案中,定义不足3s的异物入侵为轻故障;定义大于3s的异物入侵为严重故障;
38.在一些实施方案中,定义发生在碳滑板正上方、持续时间5s以内的弓网拉弧为轻故障;定义发生在碳滑板正上方、持续时间5s以上、主动控制系统压力传感器测量气压与控制单元设定气压差值不足600mbar的弓网拉弧为轻故障;定义发生在碳滑板正上方、持续时间5s以上、主动控制系统压力传感器测量气压与控制单元设定气压差值超过600mbar为严重故障。
39.在一些实施方案中,主动控制系统控制单元可按故障等级直接处理故障,并将所有故障信息传送至列车监控显示屏,供工作人员查看故障信息。
40.在一些实施方案中,受电弓运行姿态由摄像头监测后将图像信息传送至图像处理器,图像处理器识别分析后将结果实时传输至受电弓阀板控制单元,控制单元结合图像处理器及压力传感器信息综合判断,如判定未出现故障,则维持受电弓原有运行状态运行;判定出现故障,根据故障等级进一步分析,如判定为轻故障,控制单元向车辆侧发出告警,该告警可包含故障信息、故障图像,如判定为严重故障,控制单元控制受电弓自动降下同时向车辆侧发送故障信息;控制单元日志在控制单元上电全周期运作,发生故障时记录故障信息,未发生故障时进行常态记录。
41.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1