基于冗余传感器的穿戴式柔性电容型传感器及自标定方法
1.本发明涉及技术领域,具体而言,涉及一种基于冗余传感器的穿戴式柔性电容型传感器及自标定方法。
背景技术:
2.目前,穿戴式应变传感器由于其柔软舒适性、高拉伸率、高贴合性、低环境依赖性、低成本等优势,广泛应用于体育训练、医疗康复、影视动画、体感游戏、外骨骼等领域,对人体运动进行实时的动态测量。参考公开号为cn110595649a的发明专利申请,该发明专利申请就公开了一种穿戴式应变传感器,具体是扰介电弹性体传感器。
3.为了提高传感器的穿戴舒适性、运动跟随性、更换便捷性和重复利用性,其通常被固定于紧身服装、护膝、护腕等织物材料表面。在传感器首次使用前,将借助外部高精度传感器对人体关节转角
‑
传感器应变关系进行标定并将标定函数用于后续的人体关节转角计算。当再次需要人体运动测量而穿上有传感器的服装或者在已穿着的服装上固定传感器时,却无法保证当前传感器穿戴位姿与首次标定位姿一致。一方面,由于服装穿戴一致性、传感器布置一致性都很难控制;另一方面,随着长时间的运动,将出现传感器跟随服装与皮肤发生滑移错位,这种滑移与人体几何参数、服装力学参数、人体运动的历史积累有关,几乎是不可预测的。以上因素会导致首次标定建立的人体关节转角
‑
传感器应变关系无法继续使用,需要重新标定或对原有的标定关系进行校准。目前,针对应变传感器的错位,标定并提高测量精度的方式主要有以下几种:
4.(1)选择对布置位置不敏感的传感器,利用惯性传感器无约束时收到冲击后表现的数据突变的现象可校正测量量,该方法测量精度低且仅适用于惯性传感器。
5.(2)使用高精度的标准仪器、设备或工具直接标定,例如光学动捕系统。该方法可实现高精度标定,但由于需要额外的测量设备,因此其高环境依赖性导致了不适用于户外移动测量情况的传感器标定。
6.(3)识别传感器的旋转量和平移量,通过坐标变化技术计算当前准确的传感器位置和姿态。该方法不改变原有的检测方法和精度,但仍需要额外的测量设备。
7.(4)利用人工神经网络中的时延神经网络、长短期记忆神经网络、循环神经网络等方法根据当前的和历史的数据对当前传感器状态进行在线计算并对测量模型进行在线调节。该方法适用于连续的和有规律的传感器信号变化,不适用于离散的传感器状态的判定,并且神经网络计算过程复杂且耗时,数据输出频率低。
8.因此,低环境依赖性的高精度、高效率的传感器标定方法仍需研究与开发,以适用于快速发展的穿戴式传感器应用领域,并应用于体育训练、医疗康复、影视动画、体感游戏、外骨骼等领域的人体运动测量。
技术实现要素:
9.本发明就是为了解决现有针对穿戴式应变传感器的标定方法存在精度低,效率
低,需要额外的测量设备,高环境依赖性的技术问题,提供一种穿戴式应变传感器的集成式结构以及一种低环境依赖性的高精度和高效率的基于冗余传感器的穿戴式应变传感器的快速自标定方法。
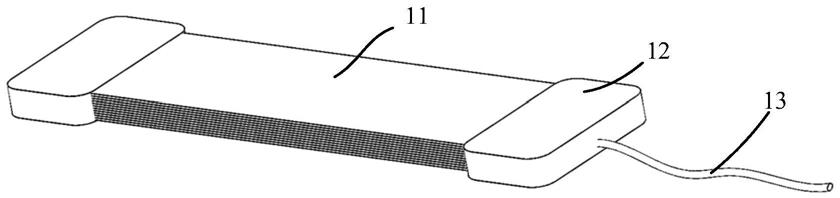
10.本发明提供一种基于冗余传感器的穿戴式柔性电容型传感器,包括主体部分(11),与主体部分两端连接的引脚及封装部分(12),以及导线部分(13),主体部分包括粘接在一起的硅橡胶层(1101)、硅橡胶层 (1103)、硅橡胶层(1105)、硅橡胶层(1107)、硅橡胶层(1109)、硅橡胶层(1111)、电极层(1102)、电极层(1104)、电极层(1106)、电极层 (1108)和电极层(1110);
11.硅橡胶层(1105)、电极层(1104)和电极层(1106)构成主传感器,硅橡胶层(1105)作为介电层,电极层(1104)和电极层(1106)分别作为主传感器的正极层和负极层;
12.硅橡胶层(1107)作为介电层,电极层(1108)、电极层(1106)分别作为硅橡胶层(1107)的正极层、负极层,电极层(1108)包括多个尺寸相同的冗余电极区域,多个冗余电极区域之间存在间隔,冗余电极区域、硅橡胶层(1107)和电极层(1106)组成冗余传感器,有多个冗余传感器;
13.硅橡胶层(1103)、硅橡胶层(1109)、硅橡胶层(1101)和硅橡胶层(1111)作为保护层,电极层(1102)和电极层(1110)作为屏蔽层;
14.电极层(1102)、电极层(1104)、电极层(1106)、电极层(1110)、每个冗余电极区域均通过铜箔与导线部分连接。
15.优选地,多个冗余电极区域为第一冗余电极区域(11081)、第二冗余电极区域(11082)、第三冗余电极区域(11083)和第四冗余电极区域 (11084),第一冗余电极区域(11081)、第二冗余电极区域(11082)、第三冗余电极区域(11083)和第四冗余电极区域(11084)的尺寸相同;第一冗余电极区域(11081)、硅橡胶层(1107)和电极层(1106)组成第一冗余传感器,第二冗余电极区域(11082)、硅橡胶层(1107)和电极层(1106)组成第二冗余传感器,第三冗余电极区域(11083)、硅橡胶层(1107)和电极层(1106)组成第三冗余传感器,第四冗余电极区域(11084)、硅橡胶层(1107)和电极层(1106)组成第四冗余传感器;
16.电极层(1102)、电极层(1104)、电极层(1106)、电极层(1110)、第一冗余电极区域(11081)、第二冗余电极区域(11082)均通过铜箔与导线部分连接,第三冗余电极区域(11083)通过电极区域(11085)、铜箔与导线部分连接,第四冗余电极区域(11084)通过电极区域(11086)、铜箔与导线部分连接。
17.本发明还提供一种应用基于冗余传感器的穿戴式柔性电容型传感器的自标定方法,包括以下步骤:
18.第一步,将基于冗余传感器的穿戴式柔性电容型传感器布置于紧身服装的人体关节处,穿戴者穿上该紧身服装,针对当前的传感器布置状态,穿戴者的关节运动一次;
19.第二步,传感器数据采集板对主传感器的应变数据ε
m
和冗余传感器的应变数据ε
i
进行实时采集与存储,根据应变数据获得对应于传感器当前布置状态的特征量,对应穿戴状态n,特征量包括相对平均值t
i_n
、相对最大值m
i_n
和最大值的相对序号r
i_n
,特征量向量记为(t
i_n
,m
i_n
,r
i_n
)
t
;相对平均值t
i_n
为冗余传感器平均应变a
i_n
与主传感器平均应变a
m_n
的比值,如公式(3)所示,其中冗余传感器平均应变a
i_n
为冗余传感器在运动周期内采集的n个应变数据ε
i_n_j
的平均值,如公式(1)所示;主传感器平均应变a
m_n
为主传感器在运动周期内
采集的n个应变数据ε
m_n_j
的平均值,如公式(2)所示;相对最大值m
i_n
为冗余传感器最大应变d
maxi_n
与主传感器最大应变d
maxm_n
的比值,如公式(6)所示,其中冗余传感器最大应变d
maxi_n
为冗余传感器在运动周期内采集的n个应变数据ε
i_n_j
的最大值,如公式(4)所示,主传感器最大应变d
maxm_n
为主传感器在运动周期内采集的n个应变数据ε
m_n_j
的最大值,如公式(5)所示,最大值的相对序号r
i_n
为冗余传感器最大值序号s
i_n
与应变数据的有效总数 n的比值,如式(7),其中冗余传感器最大值序号s
i_n
为d
maxi_n
的序号;
[0020][0021][0022][0023]
d
maxi_n
=max(ε
i_n_j
)
ꢀꢀꢀ
(4)
[0024]
d
maxm_n
=max(ε
m_n_j
)
ꢀꢀꢀ
(5)
[0025][0026][0027]
第三步,特征量向量(t
i_n
,m
i_n
,r
i_n
)
t
作为人工神经网络的输入参数 a,如式(8)、(9)和(10);
[0028]
p
i
=(t
i_n
,m
i_n
,r
i_n
)
ꢀꢀꢀ
(8)
[0029]
a
n
=(p1,p2,
…
,p
t
)
t
ꢀꢀꢀ
(9)
[0030]
a=(a1,a2,
…
,a
n
,
…
)
ꢀꢀꢀ
(10)
[0031]
经过神经网络计算后,输出参数为人体关节转角
‑
传感器应变关系的多项式拟合函数的各项系数b,如式(11)和(12):
[0032]
b
n
=(k
0_n
,k
1_n
,k
2_n
,
…
,k
s_n
)
t
ꢀꢀꢀ
(11)
[0033]
b=(b1,b2,
…
,b
n
,
…
)
ꢀꢀꢀ
(12)
[0034]
第四步,在完成传感器当前状态自标定后,进行主传感器实时人体运动测量阶段,在人体关节动态实时运动过程中,主传感器实时输出应变ε
m
,应用公式(11)和(12)中对应的人体关节角度
‑
传感器应变函数的多项式系数,可通过式(13)精确计算针对当前传感器布置位置的人体关节实时角度θ:
[0035]
θ=k
0_n
+k
1_n
ε
m
+k
2_n
ε
m2
+
…
+k
s_n
ε
ms
ꢀꢀꢀ
(13) 。
[0036]
优选地,第二步中,当有4个冗余传感器时,人工神经网络的输入参数如式(14)和(15):
[0037]
a
n
=(t
1_n
,m
1_n
,r
1_n
,t
2_n
,m
2_n
,r
2_n
,t
3_n
,m
3_n
,r
3_n
,t
4_n
,m
4_n
,r
4_n
)
t
ꢀꢀꢀ
(14)
[0038]
a=(a1,a2,
…
,a
n
,
…
)
ꢀꢀꢀ
(15) 。
[0039]
本发明的有益效果是,依靠传感器自身集成式结构实现冗余传感器标定,穿戴者只需进行屈伸、蹲起等简单关节运动即可完成自标定过程,简单快速,不需要借助额外的测量设备,标定过程对环境依赖性低、成本低且标定过程快速,且标定后穿戴式传感器测量精度显著提高,更优地应用于各领域的人体运动动态测量。
[0040]
本发明进一步的特征和方面,将在以下参考附图的具体实施方式的描述中,得以清楚地记载。
附图说明
[0041]
图1是穿戴式柔性电容型集成式传感器的立体示意图;
[0042]
图2是图1所示穿戴式柔性电容型集成式传感器的主体部分的结构示意图,图2中(1)是穿戴式柔性电容型集成式传感器的主体部分的二维结构示意图,图2中(2)是图2中(1)中a
‑
a方向的剖视图为主传感器正极层的剖视图,图2中(3)是图2中(1)中b
‑
b方向的剖视图为冗余传感器的正极层的剖视图,图2中(4)是图2中(1)中c
‑
c方向的剖视图;
[0043]
图3是穿戴式柔性电容型集成式传感器的冗余传感器电极层及两侧薄膜结构的立体示意图;
[0044]
图4是四个冗余传感器电极层的尺寸图;
[0045]
图5是穿戴式柔性电容型集成式传感器的制备过程示意图,
[0046]
图6是穿戴式柔性电容型集成式传感器的电路原理图;
[0047]
图7是穿戴式柔性电容型集成式传感器单通道信号采集与处理原理图;
[0048]
图8是穿戴式柔性电容型集成式传感器的主传感器的电容变化率
‑
应变关系;
[0049]
图9是冗余传感器的电容变化率
‑
应变关系;
[0050]
图10是穿戴式柔性电容型集成式传感器自标定和动态测量过程流程图;
[0051]
图11是穿戴式柔性电容型集成式传感器重新布置在服装后进行自标定之后和之前的人体关节角度测量效果对比,图中关节角度真实值通过利用opencv处理小觅双目摄像头mynt
‑
s1030采集的图像、识别标记点并计算获得;
[0052]
图12是已布置穿戴式柔性电容型集成式传感器的服装被重新穿着后进行自标定之后和之前的人体关节角度测量效果对比;
[0053]
图13是已布置传感器的服装跟随人体长时间运动后进行自标定之后和之前的人体关节角度测量效果对比。
[0054]
图中符号说明:
[0055]
11.主体部分,1101.硅橡胶层,1102.电极层,1103.硅橡胶层,1104. 电极层,1105.硅橡胶层,1106.电极层,1107.硅橡胶层,1108.电极层, 1109.硅橡胶层,1110.电极层,1111.硅橡胶层;12.引脚及封装部分, 13.导线部分,40.铜箔,41.铜箔,42.铜箔,43.铜箔。
具体实施方式
[0056]
以下参照附图,以具体实施例对本发明作进一步详细说明。
[0057]
如图1所示,穿戴式柔性电容型集成式传感器包括主体部分11、引脚及封装部分12和导线部分13。
[0058]
如图2
‑
4所示,主体部分11包括硅橡胶层1101、硅橡胶层1103、硅橡胶层1105、硅橡胶层1107、硅橡胶层1109、硅橡胶层1111、电极层1102、电极层1104、电极层1106、电极层1108和电极层1110。其中,各个硅橡胶层的尺寸均为65mm
×
25mm。其中,硅橡胶层1105作为介电层,电极层1104和电极层1106分别作为正极和负极层,硅橡胶层1105、电极层1104和电极层1106构成电容型主传感器,电极层1104为电容型主传感器的正极层,电极层1104的尺寸是50mm
×
15mm,电极层1106 为电容型主传感器的负极层,电极层1106的尺寸是50mm
×
15mm。
[0059]
硅橡胶层1107作为介电层,电极层1108、电极层1106分别作为正极层、负极层,构成四个电容型冗余传感器。电极层1108由四个独立的电极区域组成,分别是:第一冗余电极区域11081、第二冗余电极区域 11082、第三冗余电极区域11083、第四冗余电极区域11084;第二冗余电极区域11082和第一冗余电极区域11081的尺寸一致,均为21mm
×
6mm;第三冗余电极区域11083和第四冗余电极区域11084的尺寸一致,均为 21mm
×
6mm,也就是说四个冗余电极区域的尺寸一致。第二冗余电极区域11082和第一冗余电极区域11081边缘之间的间隔是3mm,第三冗余电极区域11083和第四冗余电极区域11084之间的间隔是3mm,第四冗余电极区域11084与第二冗余电极区域11082之间的间隔是3mm,第三冗余电极区域11083与第一冗余电极区域11081之间的间隔是3mm。3mm 的间距只是举例,间距并不限于3mm,只要相互之间有一定间距即可。第一冗余电极区域11081与电极层1106面积重合。第二冗余电极区域 11082与电极层1106面积重合。第三冗余电极区域11083与电极层1106 面积重合,为有效区域。第四冗余电极区域11084与电极层1106面积重合,为有效区域。第一冗余电极区域11081、硅橡胶层1107和电极层1106 组成第一冗余传感器。第二冗余电极区域11082、硅橡胶层1107和电极层1106组成第二冗余传感器。第三冗余电极区域11083、硅橡胶层1107 和电极层1106组成第三冗余传感器,第四冗余电极区域11084、硅橡胶层1107和电极层1106组成第四冗余传感器。铜箔40与第一冗余电极区域11081连接,铜箔41与第二冗余电极区域11082连接。为了使铜箔42、铜箔43和铜箔40、铜箔41位于同一侧,增加了电极区域11085和电极区域11086,电极区域11085和电极区域11086并不与电极层1106面积重合,不是有效区域,所以并不对电容值产生影响。电极区域11085与第三冗余电极区域11083连接,铜箔42与电极区域11085连接;电极区域11086与第四冗余电极区域11084连接,铜箔43与电极区域11086连接。
[0060]
硅橡胶层1103、硅橡胶层1109、硅橡胶层1101和硅橡胶层1111作为保护层以用于保护电极层质量。电极层1102和电极层1110作为屏蔽层(尺寸均为50mm
×
21mm),电极面积全覆盖负极层、主传感器正极层和冗余传感器正极层全部区域,其与负极层等电位,起屏蔽外界电磁干扰和消除寄生电容的作用。每个电极层由铜箔引出,铜箔通过988硅胶接着剂与电极层连接,导线通过焊锡与铜箔连接。引脚及封装部分12 是将两片125μm的pet覆盖在主体部分11的两端并完全覆盖铜箔区域,并由988硅胶接着剂完全填充而构成,封装后的传感器有效区域(两端 pet之间的电极覆盖区域)尺寸为45mm
×
15mm。
[0061]
如图5所示,是穿戴式柔性电容型集成式传感器的制备过程主要包括以下步骤:
[0062]
(a)硅橡胶薄膜制备:将硅橡胶lsr4305a/b与异辛烷按照比例7:7:6 混合后经过行星搅拌机混匀和脱泡后形成硅胶液32的轻轻倒至氟素离型膜上,由自动涂布器31控制所需厚度并缓慢推移。刮涂完成后将其放于加热箱中加热至70℃保持30min,取出后覆盖氟素离型膜。
[0063]
(b)硅橡胶块切割:使用激光切割机将整张覆盖氟素离型膜的硅橡胶膜切割成所需大小。
[0064]
(c)揭取离型膜:将氟素离型膜33揭下,形成硅橡胶层。
[0065]
(d)粘贴引脚和刮涂电极层:将铜箔36粘贴于硅橡胶膜上,覆盖上用激光切割机切割的pet面具34;将导电炭黑ec300jd和异丙醇按照比例0.6:150混合后经超声振荡140s,后加入硅橡胶和异辛烷,按照比例导电炭黑ec300jd:异丙醇:硅橡胶lsr4305a/b:异辛烷为0.6:150:3:3:5进行混合,后通过行星搅拌机进行混匀和脱泡,制成硅橡胶
‑
炭黑混合物35,将硅橡胶
‑
炭黑混合物35倒于面具34一端,使用不锈钢棒37进行刮涂,刮涂完成后,将面具34揭下,即形成电极层,该电极层与铜箔36连接在一起。
[0066]
(e)等离子处理:电极刮涂完成后将其放于加热箱中加热至70℃保持 30min,取出后将其与刚揭下氟素离型膜的硅橡胶层同时放入等离子处理机进行处理。
[0067]
(f)等离子处理完成后,将硅橡胶层和电极层粘接。
[0068]
(g)经过多层电极刮涂和与硅橡胶层粘合后,完成传感器主体部分的制作。
[0069]
(h)将引脚部分与导线焊接并进行封装即完成传感器的制作。
[0070]
电极层1102、电极层1104、电极层1106、电极层1110、第一冗余电极区域11081、第二冗余电极区域11082均通过铜箔与导线部分13连接。第三冗余电极区域11083通过起连接作用的电极区域和铜箔与导线部分 13连接。第四冗余电极区域11084通过起连接作用的电极区域和铜箔与导线部分13连接。
[0071]
参考图6,穿戴式柔性电容型集成式传感器由5个电容型传感器组成,每一个电容传感器都可等效为一个可变电容和两个电极电阻的串联形式, c
m
和r
m1
、r
m2
为主传感器的等效模型,c
ri
和r
ri1
、r
ri2
(i=1,2,3,4)为冗余传感器的等效模型,c
r1
和r
r11
、r
r12
为第一冗余传感器的等效模型,c
r2
和r
r21
、r
r22
为第二冗余传感器的等效模型,c
r3
和r
r31
、r
r32
为第三冗余传感器的等效模型,c
r4
和r
r41
、r
r42
为第四冗余传感器的等效模型。图5 中u0为输入电压,各支路上均串联了一个分压电阻r
m
、r1、r2、r3和 r4,u
m
、u
r1
、u
r2
、u
r3
、u
r4
分别为主传感器和各个冗余传感器的输出电压。对于单通道传感器信号的采集和处理,如图7所示。v0为600hz的正弦脉冲直流输入信号,电压范围为0~3.3v,与gnd之间的电位差等于图5中u0;r
x
为串联分压电阻,选为510kω,对应于图5中r
m
、r1、 r2、r3和r4;v
c
与gnd之间的电位差对应传感器正极与负极之间的电位差,对应图5中u
m
、u
r1
、u
r2
、u
r3
和u
r4
;r
y
为限流电阻,选为510ω; v
out
为通道输出信号,将电压跟随器oa处理后的信号输出至芯片进行模数转换并提取周期最大值和最小值的差值作为最终输出电压值。
[0072]
图8和图9为按照图5所示传感器制备方法和图6和图7所示检测电路完成的主传感器和单个冗余传感器的电容变化率
‑
应变数据。电容变化率δ通过式(1)计算,其表示传感器当前电容c与传感器原长时电容c0的差值与原长时电容c0的比值。应变ε由式(2)计算,为传感器当前长度 l与传感器原长l0的差值再与原长l0的比值。
[0073][0074][0075]
根据平行板电容器计算方法,主传感器电容c
m
可由式(3)计算,其与真空介电常数ε0、相对介电常数ε
r
、电容器宽度w
m
和长度l
m
呈正比,与电容器厚度d
m
呈反比。根据体积不可压缩性和电容传感器在宽度和厚度方向无约束的条件,可以得到主传感器电容c
m
计算如式(4),其中w
m0
和d
m0
分别为传感器初始宽度和初始厚度,可以看出传感器电容c
m
与传感器长度l
m
呈线性关系,因此电容变化率
‑
应变关系亦为线性。主传感器的δ
‑
ε线性关系曲线如图8,主传感器的δ
‑
ε关系可拟合为δ=0.5471ε,可决系数r2为0.9988。
[0076][0077][0078]
冗余传感器电容c
ri
(i=1,2,3,4)可由式(5)计算,其与真空介电常数ε0、相对介电常数ε
r
、电容器宽度w
ri
和长度l
ri
呈正比,与电容器厚度d
ri
呈反比;四个冗余传感器电容的容值相同。根据体积不可压缩性和电容传感器在宽度和厚度方向无约束的条件,可以得到冗余传感器电容c
ri
计算如式(6),其中w
ri0
和d
ri0
分别为传感器初始宽度和初始厚度,可以看出冗余传感器电容c
ri
与传感器长度l
ri
呈线性关系,因此电容变化率
‑
应变关系亦为线性。冗余传感器的δ
‑
ε关系如图9,δ
‑
ε关系可拟合为δ=0.5010ε,可决系数r2为0.9966。
[0079][0080][0081]
利用上述传感器结构,将柔性电容型集成式传感器布置于紧身服装的人体关节处,穿戴者穿上该紧身服装,针对当前的传感器布置状态,穿戴者需进行自标定动作(即穿戴者的关节运动一次,例如,肘关节进行屈伸运动,下肢关节进行蹲起运动等)。在一次运动过程中(例如,屈伸运动算一次,蹲起运动算一次),传感器数据采集板对主传感器的应变数据ε
m
和冗余传感器的应变数据ε
i
(i=1,2,3,4)进行实时采集与存储,动作完成后根据应变数据获得对应于传感器当前布置状态的特征量,对应穿戴状态n,包括相对平均值t
i_n
、相对最大值m
i_n
和最大值的相对序号 r
i_n
,特征量向量记为(t
i_n
,m
i_n
,r
i_n
)
t
。相对平均值t
i_n
为冗余传感器平均应变a
i_n
与主传感器平均应变a
m_n
的比值,其中冗余传感器平均应变 a
i_n
为冗余传感器在运动周期内采集的n个应变数据ε
i_n_j
的平均值,主传感器平均应变a
m_n
为主传感器在运动周期内采集的n个应变数据ε
m_n_j
的平均值,如式(7)
‑
(9)。相对最大值m
i_n
为冗余传感器最大应变d
maxi_n
与主传感器最大应变d
maxm_n
的比值,其中冗余传感器最大应变d
maxi_n
为冗余传感器在运动周期内采集的n个应变数据ε
i_n_j
的最大值(根据全部冗余传感器的应变数据计算最大值),主传感器最大应变d
maxm_n
为主传感器在运动周期内采集的n个应变数
据ε
m_n_j
的最大值,如式(10)
‑
(12)。最大值的相对序号r
i_n
为冗余传感器最大值序号s
i_n
与应变数据的有效总数n的比值,如式(13),其中冗余传感器最大值序号s
i_n
为d
maxi_n
的序号。
[0082][0083][0084][0085]
d
maxi_n
=max(ε
i_n_j
)
ꢀꢀꢀ
(10)
[0086]
d
maxm_n
=max(ε
m_n_j
)
ꢀꢀꢀ
(11)
[0087][0088][0089]
对应于相同的传感器布置状态,穿戴者进行相同类型的不同幅度的标定动作,利用式(9)、(12)和(13)计算的特征量仍能保证相对稳定。特征量向量(t
i_n
,m
i_n
,r
i_n
)
t
作为人工神经网络nn输入参数a,如式(14)、 (15)和(16)。
[0090]
p
i
=(t
i_n
,m
i_n
,r
i_n
)
ꢀꢀꢀ
(14)
[0091]
a
n
=(p1,p2,
…
,p
t
)
t
ꢀꢀꢀ
(15)
[0092]
a=(a1,a2,
…
,a
n
,
…
)
ꢀꢀꢀ
(16)
[0093]
根据公式(14)、(15)和(16)可得出设置4个冗余传感器时,人工神经网络nn的输入参数如式(17)和(18)。
[0094]
a
n
=(t
1_n
,m
1_n
,r
1_n
,t
2_n
,m
2_n
,r
2_n
,t
3_n
,m
3_n
,r
3_n
,t
4_n
,m
4_n
,r
4_n
)
t
ꢀꢀꢀ
(17)
[0095]
a=(a1,a2,
…
,a
n
,
…
)
ꢀꢀꢀ
(18)
[0096]
经过神经网络nn计算后,输出参数为人体关节转角
‑
传感器应变关系的多项式拟合函数的各项系数b,如式(19)和(20)。
[0097]
b
n
=(k
0_n
,k
1_n
,k
2_n
,
…
,k
s_n
)
t
ꢀꢀꢀ
(19)
[0098]
b=(b1,b2,
…
,b
n
,
…
)
ꢀꢀꢀ
(20)
[0099]
在完成传感器当前状态自标定后,进行主传感器实时人体运动测量阶段。在人体关节动态实时运动过程中,主传感器实时输出应变ε
m
,应用式(19)和(20)中对应的人体关节角度
‑
传感器应变函数的多项式系数,可通过式(21)精确计算针对当前传感器布置位置的人体关节实时角度θ。
[0100]
θ=k
0_n
+k
1_n
ε
m
+k
2_n
ε
m2
+
…
+k
s_n
ε
ms
ꢀꢀꢀ
(21)
[0101]
传感器重新布置在服装后由于无法保证布置位姿与首次标定布置位姿一致,导致传感器关节计算值与真实值之间误差较大,在通过本发明方法进行自标定之后的关节角度测量精度显著提高,如图11。
[0102]
已布置传感器的服装被重新穿着后由于无法保证服装穿戴位置造成的传感器相对于人体皮肤或人体骨骼结构的相对位姿关系与首次标定时的相对位姿关系一致,导致传感器关节计算值与真实值之间误差较大,在通过本发明方法进行自标定之后的关节角度测量精度显著提高,如图 12。
[0103]
已布置传感器的服装跟随人体长时间运动后由于传感器被拉扯以致传感器位姿与首次标定时位姿不一致,导致传感器关节计算值与真实值之间误差较大,在通过本发明方法进行自标定之后的关节角度测量精度显著提高,如图13。
[0104]
本实施例中,冗余传感器的个数是4个,只是举例,冗余传感器的可以是两个、三个、五个或更多个。
[0105]
以上所述仅对本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1