一种月面大范围道路拓扑网构建方法、系统及装置
1.本发明涉及一种月面道路拓扑网构建方法系统及装置,属于月球探测路径规划技术领域。
背景技术:
2.现有的道路拓扑网的构建主要都是基于泊松圆盘采样算法和a*算法实现的。
3.泊松圆盘采样(poisson disc sampling)算法是一种平面随机采样算法,生成的采样点满足随机而且尽量均匀分布在平面上的特性,且各点之间的距离均不小于指定的最小距离。首先设定采样点之间的最小距离为r,然后在采样范围内随机生成一个活跃采样点,在这个采样点周围的环形区域中再随机生成k个候选采样点,这个环形区域以该活跃采样点为圆心,半径从r延伸到2r。在这k个随机候选采样点中,剔除掉与已选定的采样点距离小于r的点,剩下的作为新的活跃采样点。如果这k个采样点都被剔除了,没有剩下任何可用的点,则将此环形区域圆心处的所选活跃采样点标记为非活跃,不再用于生成候选项。在对候选采样点剔除筛选时,使用了对角线长度为r的单元网格来加速距离检查。每个单元网格最多只能包含一个采样点,只需检查候选采样点周边固定数量的相邻单元网格即可。当所有采样点均为非活跃状态时,算法迭代结束。泊松分布采样方法的主要缺点是无法精确地控制采样点的数目和质量。
4.a*(a
‑
star)算法是一种求解最短路径最有效的直接搜索方法,是一种常用启发式算法,根据启发式函数f(n)扩展搜索的节点,f(n)=g(n)+h(n),其中,f(n)是从初始状态经由状态n到目标状态的代价估计,g(n)是在状态空间中从初始状态到状态n的实际代价,h(n)是从状态n到目标状态的最佳路径的估计代价。当启发式函数f(n)满足一致性条件时a*可以找到最优解。同时,a*算法将路径规划过程中待检测的节点存放于open表中,而已检测过的格子则存放于close表中,然后扩展当前节点的所有邻居节点加入open表中,再选择f(n)最小的节点进行扩展,如此迭代直至搜索到目标节点。然后使用父节点(parent)储存回溯节点,从目标节点回溯最终路径。启发式函数是a*算法的核心函数,直接决定了算法生成路径的特点和质量。
技术实现要素:
5.本发明为了解决目前的月面路径规划方法或者道路拓扑网络存在任务区域覆盖性不佳的问题。
6.一种月面大范围道路拓扑网构建方法,首先基于月面地形特征进行月面可达区域分析,得到月面可达区域地图;然后基于月面可达区域地图,分析查找平坦区域,然后对备选平坦区进行最优泊松圆盘采样,形成构建道路拓扑网的网络节点集;基于网络节点集,根据最近邻居网络结构确定道路拓扑网网络结构;最后根据网络节点集和道路拓扑网网络结构,利用a*算法连接各网络节点,实现道路拓扑网的构建;
7.所述分析查找平坦区域,然后对备选平坦区进行最优泊松圆盘采样,形成构建道
路拓扑网的网络节点集的过程包括以下步骤:
8.采取滑动窗口的方法选择平坦区,即在月面可达性地图上设置一个固定大小的第二滑动窗口,计算第二滑动窗口内的可达区域覆盖率,选择所有可达覆盖率超过覆盖率阈值的第二滑动窗口区域作为备选平坦区;
9.基于泊松圆盘采样的方式,在生成采样点时选取第二滑动窗口可达区域覆盖率最高的平坦区中心位置作为新的采样点:首先基于第二滑动窗口计算可达区域覆盖率得到备选平坦区位置集合p
plain
及其相应的区域覆盖率集合s
plain
,然后在当前区域覆盖率集合s
plain
中选取覆盖率最高的节点作为当前节点,再将其从s
plain
中移除;接下来判断当前节点与已存在的采样节点间的距离是否均大于采样半径r
s
,若是则将其作为新的采样节点加入采样点位置集合p
node
,否则舍弃该节点,在s
plain
中重新采样,直至遍历完成所有备选平坦区。
10.进一步地,所述基于网络节点集,根据最近邻居网络结构确定道路拓扑网网络结构的过程包括以下步骤:
11.根据最近邻居网络结构,通过节点间的距离来设置节点间的可连通性,通过将距离小于2*r
s
的节点设置为可连通,距离大于2*r
s
的节点设置为不可连通,据此可完成道路拓扑网节点的选择及可连通性的设置。
12.进一步地,利用a*算法连接各网络节点,形成道路拓扑网的构建中所述的a*算法的启发式函数为安全启发式函数,具体如下:
13.f
safe
(n)=g(n)+ω
safe
(n)+diagonal_heuristic(n)
14.式中:g(n)是在状态空间中从初始状态到状态n的实际代价,定义为从起点到当前节点的实际距离;ω
safe
(n)为节点n的安全代价,定义为以节点n为中心的第二滑动窗口内的障碍总数量;diagonal_heuristic()为对角启发式距离函数、欧氏距离函数或满足一致性条件的启发式函数。
15.进一步地,所述第二滑动窗口的大小根据实际的空间大小确定,实际空间20km
×
20km。
16.进一步地,基于月面地形特征进行月面可达区域分析的过程采用滑动窗口的形式得到dem地图的地形特征。
17.进一步地,采用滑动窗口的形式得到dem地图的地形特征的过程包括以下步骤:
18.设置一个3
×
3像素栅格大小的滑动窗口,即第一滑动窗口,将第一滑动窗口内计算得到的地形信息作为中心栅格的地形特征,所述地形特征包括地形坡度θ、地形起伏度r以及地形粗糙度δ;
19.然后根据巡视器的能力设置最大坡度、起伏度、粗糙度的阈值限制;
20.将超过巡视器能力阈值限制的栅格区域视为障碍区域,据此可将dem地图转化为可达区域地图。
21.进一步地,所述的地形坡度θ、地形起伏度r以及地形粗糙度δ分别如下:
[0022][0023]
r=h
max
‑
h
min
[0024][0025]
式中:f
x
为中心栅格东西方向高程变化率;f
y
为中心栅格南北方向高程变化率,计算方法如下式所示;h
max
为第一滑动窗口内的最大高程值;h
min
为第一滑动窗口内的最小高程值;h
i
为第一滑动窗口内第i个栅格对应的高程值;为第一窗口内所有高程值的平均值。
[0026]
进一步地,所述的中心栅格东西方向高程变化率f
x
、中心栅格南北方向高程变化率f
y
分别如下:
[0027][0028][0029]
式中:h1‑
h9分别为3
×
3窗口内部的9个栅格对应的高程值;g为dem数据的分辨率大小。
[0030]
进一步地,所述的根据巡视器的能力设置最大坡度、起伏度、粗糙度的阈值限制如下:
[0031]
θ≤20
°
[0032]
r≤2*g*tan(20
°
)
[0033][0034]
式中:g为dem数据的分辨率大小。
[0035]
一种月面大范围道路拓扑网构建系统所述系统用于执行一种月面大范围道路拓扑网构建方法。
[0036]
一种月面大范围道路拓扑网构建装置,所述装置用于存储和/或运行一种月面大范围道路拓扑网构建系统。
[0037]
有益效果:
[0038]
月面大范围道路拓扑网是指全月范围内互联互通的大范围转移通道网,通过构建全月通行道路拓扑网,可以实现探测器在全月可达区域内的大范围转移路径的规划。相比于传统规划算法直接搜索大范围转移路径,构建道路拓扑网规划具有以下优势:1)道路拓扑网构建完成后,由于月球地形环境基本不会发生变化,可长期用于大范围探测路径规划。2)通过道路拓扑网规划大范围转移路径规划速度明显高于直接在大规模地图上搜索转移路径。3)可提高大范围转移规划概率完备性,在某条路径无法通行时,可快速提供其他备选路径,实现“条条大路通罗马”。4)通过构建不同规模及不同密度的道路拓扑网,可实现不同范围、不同粒度的自主探测路径规划。
[0039]
本发明所提出的可达区域分析方法可以较好提取月面地形特征,给出满足巡视器能力约束的月面可达区域。同时,本发明提出的最优泊松圆盘采样结果密度适中且对整个任务区域覆盖性很好,可提高网络的覆盖效率。本发明提出的改进a*算法可使生成的路径尽量远离障碍区域,从而提高网络的安全性和可通过概率。
附图说明
[0040]
图1是apollo任务区域dem地图。
[0041]
图2是apollo任务区域可达区域分析结果。
[0042]
图3是apollo任务区域道路拓扑网节点选取结果。
[0043]
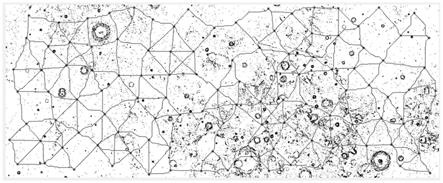
图4是apollo任务区域道路拓扑网构建结果。
具体实施方式
[0044]
具体实施方式一:
[0045]
本实施方式所述的一种月面大范围道路拓扑网构建方法,首先基于月面地形特征计算方法进行月面可达区域分析,然后改进了泊松圆盘采样方式使采样得到的网络节点具备平坦区覆盖率最优性,还改进了a*算法的启发式函数使其生成的路径可以远离障碍区域,具体包括以下步骤:
[0046]
步骤一:月面可达区域分析,具体包括以下步骤:
[0047]
本发明采用滑动窗口的形式计算dem地图的地形特征,即通过设置一个3
×
3像素栅格大小的滑动窗口,即第一滑动窗口,将第一滑动窗口内计算得到的地形信息作为中心栅格的地形特征。主要从地形坡度θ、地形起伏度r以及地形粗糙度δ三个方面来计算月面地形特征,计算方法如下式所示。
[0048][0049]
r=h
max
‑
h
min
[0050][0051]
式中:f
x
为中心栅格东西方向高程变化率;f
y
为中心栅格南北方向高程变化率,计算方法如下式所示;h
max
为第一滑动窗口内的最大高程值;h
min
为第一滑动窗口内的最小高程值;h
i
为第一滑动窗口内第i个栅格对应的高程值;为第一窗口内所有高程值的平均值。
[0052][0053][0054]
式中:h1‑
h9分别为3
×
3窗口内部的9个栅格对应的高程值;g为dem数据的分辨率大小。
[0055]
然后根据巡视器的能力设置最大坡度、起伏度、粗糙度的阈值限制,根据巡视器的越野性能设定其可正常行驶的最大坡度阈值为20
°
,而针对起伏度和粗糙度的阈值确定,将其转换为坡度限制,如下式所示。
[0056]
r≤2*g*tan(20
°
)
[0057]
[0058]
通过将超过巡视器能力阈值限制的栅格区域视为障碍区域,据此可将dem地图转化为可达区域地图。
[0059]
步骤二:基于步骤一生成的月面可达区域地图,分析查找平坦区域,然后对备选平坦区进行最优泊松圆盘采样,形成构建道路拓扑网的网络节点集,具体包括以下步骤:
[0060]
本发明采取滑动窗口的方法选择平坦区,即在月面可达性地图上设置一个固定大小的第二滑动窗口,第二滑动窗口的大小根据实际的空间大小确定,优选为实际空间20km
×
20km,计算第二滑动窗口内的可达区域覆盖率,选择所有可达覆盖率超过95%的第二滑动窗口区域作为备选平坦区。
[0061]
由于泊松圆盘采样不能保证采样点的质量,本方法提出最优泊松圆盘采样,即在生成采样点时不再使用随机采样策略,而是选取第二滑动窗口可达区域覆盖率最高的平坦区中心位置作为新的采样点,这样就可以保证最终采样得到的道路拓扑网节点满足最优性。首先基于第二滑动窗口计算可达区域覆盖率得到备选平坦区位置集合p
plain
及其相应的区域覆盖率集合s
plain
,然后在当前区域覆盖率集合s
plain
中选取覆盖率最高的节点作为当前节点,再将其从s
plain
中移除。接下来判断当前节点与已存在的采样节点间的距离是否均大于采样半径r
s
,若是则将其作为新的采样节点加入采样点位置集合p
node
,否则舍弃该节点,在s
plain
中重新采样,直至遍历完成所有备选平坦区,算法具体过程见表1。
[0062]
表1
[0063][0064]
步骤三:基于步骤二生成的网络节点集,根据最近邻居网络结构确定道路拓扑网网络结构,具体包括以下步骤:
[0065]
最近邻居网络是一种最为常见的拓扑网络结构,其具体形式为每个网络节点只与自己一定距离内的邻居节点相连,常用于道路网、物流网等网络结构设计。本发明根据最近邻居网络结构,通过节点间的距离来设置节点间的可连通性,通过将距离小于2*r
s
的节点设置为可连通,距离大于2*r
s
的节点设置为不可连通,据此可完成道路拓扑网节点的选择及可连通性的设置。通过调节采样半径r
s
的大小,可以调节道路网的密度,适当的道路网密度可以保证良好的月面区域可达性以及道路网的覆盖面积,从而提高道路网的覆盖效率。
[0066]
步骤四:根据步骤二的网络节点集和步骤三的网络结构,使用改进a*算法连接各网络节点,形成道路拓扑网的构建,具体包括以下步骤:
[0067]
本发明还提出一种连接各网络节点形成大范围道路拓扑网的路径规划方法:由于dem地图的栅格地图特性以及月面巡视路径规划的最优性要求,本发明主要研究具有最优
性保证的启发式图搜索算法(a*算法),改进了a*算法的启发式函数,使其生成的路径尽量远离障碍区域,从而提高道路拓扑网的安全性和可通过概率。
[0068]
利用安全启发式函数f
safe
(n)来指导算法进行安全路径搜索,安全启发式函数如下:
[0069]
f
safe
(n)=g(n)+ω
safe
(n)+diagonal_heuristic(n)
[0070]
式中:g(n)是在状态空间中从初始状态到状态n的实际代价,定义为从起点到当前节点的实际距离。ω
safe
(n)为节点n的安全代价,定义为以节点n为中心的第二滑动窗口内的障碍总数量,安全代价越大说明节点n周围障碍越多,其安全性越低;diagonal_heuristic()为对角启发式距离函数,也可替换为欧氏距离函数或其他满足一致性条件的启发式函数;
[0071]
通过使用改进a*算法规划可连通节点间的安全路径,可实现道路拓扑网节点间的连接,完成全月大范围道路拓扑网的构建。
[0072]
具体实施方式二:
[0073]
本实施方式为一种月面大范围道路拓扑网构建系统,所述系统用于执行所述的一种月面大范围道路拓扑网构建方法。本实施方式所述的系统可以为一个计算机应用程序或者软件,其用于执行一种月面大范围道路拓扑网构建方法对应的代码化的程序。
[0074]
具体实施方式二:
[0075]
本实施方式为一种月面大范围道路拓扑网构建装置,所述装置用于存储和/或一种月面大范围道路拓扑网构建系统。本实施方式所述的装置包括但不限于存储设备、pc机、服务器、工作站、移动设备等,还可以是专门开发的单片机等。
[0076]
实施例:
[0077]
采用以下实施例验证本发明的有益效果
[0078]
实验环境:本节选取apollo11及apollo12两次任务的着陆点作为大范围移动探测任务的起止点。首先获取任务区域的dem数据,由于ce
‑
2全月地形数据产品在空间分辨率、全月覆盖率、定位精度和地貌结构细节表达等方面相比其他全月地形数据具有明显优势,所以本发明采用嫦娥二号ce2tmap2015数据产品中的dem
‑
50m数据集进行月面可达区域分析,提取任务区域高程信息如图1所示,任务区域面积达2207.2km
×
871.3km。
[0079]
本发明所有算法的仿真测试软件环境为windows 10+matlab 2016,硬件环境为intel(r)core(tm)i5
‑
7200u cpu+12.0gb ram。
[0080]
实验结果及分析:本发明实验首先步骤一所述地形及可达区域分析方法对该区域可通过性进行分析,结果显示如图2所示,可以看出,本节所提出的可达区域计算方法可以较好的还原月面地形特征,最终得到任务区域最大可达区域,该区域可达区域覆盖率为94.42%。
[0081]
然后本发明实验对该任务区域进行最优泊松圆盘采样,选取构建道路拓扑网所需网络节点,设置采样滑动窗口大小为20km
×
20km,设置采样半径rs=100km,阿波罗任务区域进行中途点选取仿真结果如图3所示,共采样网络节点111个,采样节点窗口内可达区域覆盖率最高100%,最低95.2%。由图3可以看出,网络节点20km范围内基本处于安全平坦区域,最优泊松圆盘采样结果密度适中且对整个任务区域覆盖性很好,从而提高道路拓扑网的覆盖效率。
[0082]
最后本发明实验进行道路拓扑网的连接构建,使用步骤四提出的改进a*算法规划各节点间路径,可使生成的路径尽量远离障碍区域,从而提高道路拓扑网的安全性和可通过概率。本发明设置改进a*算法的安全代价函数的窗口大小为1km
×
1km,即算法的安全代价权重考虑该范围内的障碍总数量,阿波罗任务区域道路拓扑网构建结果如图4所示。由图4可以看出,本发明构建的道路拓扑网可以完整覆盖apollo任务区域,且网络密度适中,可以保证良好的月面区域可达性以及覆盖效率。同时,基于道路拓扑网的转移路径会尽量远离多障碍区域,从而提高了网络的安全性和可通过概率。
[0083]
根据本发明的方法可实现月面大范围道路拓扑网构建方法,为月球探测规划问题研究提供了新的思路。
[0084]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1