一种基于微流控芯片观测絮体污泥的装置及方法与流程
1.本发明涉及絮状污泥观测技术领域,尤其是涉及一种基于微流控芯片观测絮体污泥的装置及方法。
背景技术:
2.活性污泥法是目前应用最广泛的废水生物处理方法。如果在活性污泥系统中实现污泥的自凝聚乃至颗粒化,会使反应器中截留大量沉降性能良好的颗粒污泥,而且可以提高出水水质,降低污泥沉淀系统要求,并减少剩余污泥的排放。因此,如何在废水生物处理反应器中快速、稳定、有效地培养出活性高和沉降性能好的好氧颗粒污泥,并在处理实际废水中发挥巨大的作用,成为国内外废水生物处理领域的研究热点之一。
3.目前国内外学者已经掌握影响颗粒污泥形成的主要因素,多数学者在颗粒污泥培养初期都发现了粒径增长的停滞期,此阶段污泥平均粒径未有明显变化,但完成了从絮体到颗粒的转化。此阶段不仅关系到颗粒化的速度,而且对于颗粒培养的成功与否起到了关键作用。但是,目前对这一阶段知之甚少,已有研究也大多是从宏观角度,虽然有少量的从微观角度进行了解,但是由于传统观测手段都是先从反应器中取样后经过适当处理再进行微观观察,这一过程相当于将絮体脱离原本生存环境,观察到的是取样时那一刻的絮体状态,并且下次观察仍需重新取样,这样无论在何种显微镜下观测都会失去原位性、实时性、动态性和样品统一性。
4.综上所述,由于我国在污泥絮体初始化阶段缺乏能够同时具备原位、实时、动态等特性的观测手段,难以充分了解颗粒污泥初始触发的驱动力,难以识别絮体污泥颗粒化的触发点以及絮体到颗粒的转折点,从而研究者仍只能凭经验确定颗粒污泥培养的操作要素,无法为快速培养颗粒提供具体的最优选择方案。
技术实现要素:
5.本发明提出的一种针对背景技术的不足,本发明的目的在于提供一种基于微流控芯片观测絮体污泥的装置及方法。
6.本发明解决其技术问题所采用的技术方案是:
7.一种基于微流控芯片观测絮体污泥的装置是基于微流控芯片原位成像技术的观测装置,包括营养基质装置、第一给料机构、蠕动管、第二给料机构、原液储放容器、进样管、微流控芯片、观测件、上位计算机、出液管、收集装置,其中:
8.微流控芯片具有第一入口、第二入口和出口,营养基质装置用于储放营养基质,营养基质装置通过蠕动管与微流控芯片的第一入口连通,第一给料机构用于将营养基质装置中的营养基质传送至微流控芯片的第一入口;
9.原液储放容器用于储放污泥絮体样本,原液储放容器通过进样管与第二入口连通,第二给料机构用于将污泥絮体样本从原液储放容器中传送至微流控芯片的第二入口;
10.出液管与微流控芯片的出口连接,另一端连入收集装置;
11.观测件用于对微流控芯片内物质进行观测,上位计算机与观测件通过数据传输线连接。
12.所述的营养基质装置是装有絮体生长所需营养液的容器和曝气泵组成,营养物质依据需求进行配置并按需求进行曝气;
13.所述的第一给料机构是蠕动泵,用于将营养基质匀速输送到芯片中。进基质的速度由蠕动泵转速决定,蠕动泵转速可调且由蠕动泵上的液晶显示屏实时显示,保证进水速度的稳定性;
14.所述的原液储放容器是注射器,第二给料机构为微型注射泵,使得污泥絮体可以以微流的状态进入微流控芯片,从而被芯片内部结构所捕获;
15.所述的微流控芯片是指含有微结构通道的pdms芯片或3d打印芯片。pdms芯片制作主要分成两个部分:硅模具的制备和pdms制备。硅模具的制备分为两个步骤,一是使用正胶工艺获得微流控芯片结构的光刻胶阳模图形,二是通过刻蚀工艺利用上一步得到的光刻胶图形作为掩模版在硅片上进行刻蚀一定深度得到所需的微流控芯片的硅图形。考虑到部分微流控芯片的加工工艺需要用到两次刻蚀,再完成上述两个步骤后,再次通过对准光刻工艺,与刻蚀工艺,完成最终的硅模具制备。pdms的制备是先将pdms的预聚体与固化剂按10:1的比例混合,然后把混合后的pdms溶液放入真空室中除气泡直至气泡消失为止。接着把无气泡的pdms溶液倾倒在上一步得到的微流控芯片的模具上,静置一段时间,使pdms在模具上自流平且消除可能产生的气泡。然后把模具和pdms一起放入烘箱中进行固化,固化的参数为50℃持续24h,随后自然冷却到室温。将pdms缓慢的从模具中取下,经过切割、出入口打孔及简单的修饰就可以得到pdms的微流控芯片结构。3d打印芯片通过3dshaper软件根据实际需求设计出三维芯片图像,随后进行3d打印即可。无论是哪种芯片都必须依据需求对通道和出入口进行精确的设计,而设计得当的芯片,常见的如勾状结构和凹槽结构,这些结构不仅仅能够原位、实时、动态的监测絮体生长情况,而且还可以进行原位染色即在不改变絮体原生长环境的情况下直接染色观察,更加针对性的研究絮体某个特定组分的生长情况;
16.所述的观测件可以是多种观测仪器,如普通光学显微镜、体式显微镜、生物显微镜、荧光倒置显微镜等等;
17.所述的上位计算机是由计算机和数据传输线组成,数据传输线一端连接显微镜装置,一端连接计算机,再通过图像软件将显微镜目镜所呈现的絮体在芯片通道中的生长情况显示在计算机显示器上,这样可以实时的将芯片通道中的絮体直接呈现在屏幕上,简单、方便、直观且快捷;
18.所述的收集装置是收集废液的容器,负责收集从芯片出口流经出液管的废液;
19.与现有技术相比,本发明具有如下有益效果:
20.本发明中的基于微流控芯片观测絮体污泥的装置及方法能够实时的监测污泥絮体,做到絮体生长到絮体监测的连续性,合理有效地监测全过程,具有很强的真实性。
21.本发明中的基于微流控芯片观测絮体污泥的装置及方法能够动态的监测污泥絮体。被捕获的絮体污泥可以在芯片设计的结构中自由生长,与相邻的污泥絮体发生相互作用,监测微生物聚集体形态学演变、相互接触凝聚过程、菌群的演替和分布,探究微生物产物的产生、消耗及其聚集体接触凝聚过程中的交联作用,整个动态过程在计算机系统上一目了然。
22.本发明中的基于微流控芯片观测絮体污泥的装置及方法能够原位的监测污泥絮体。由于污泥絮体被通道结构捕获后,就一直待在一定的活动空间中,所以污泥絮体的生长和监测都是在同一个空间,整个过程不需要改变污泥絮体的位置,因此自然不存在传统方法中因为空间位置转移而带来的不真实性、对絮体原有结构的破坏和操作的繁琐,并且可以对污泥絮体原位染色。
23.本发明中的基于微流控芯片观测絮体污泥的装置及方法能够依据不同的需求方便快捷的设计不同的芯片结构对污泥絮体进行监测。整个监测系统中最为小巧多变的莫过于微流控芯片,该生产技术已经达到一定技术成熟度,所以不用担心生产成本带来的经济问题。最为重要的是可以根据自己的需求设计通道结构,结合荧光微珠标记和原位染色荧光显微成像更加全方位立体的监测污泥絮体。而芯片材料的选择也可以根据实际情况进行选择,例如高精度、高纯净度的pdms芯片和方便快捷,生产速度很快的3d打印芯片。
24.本发明中的基于微流控芯片观测絮体污泥的装置及方法能够有效的减少材料的消耗,产生极少的废液。无论营养基质还是所需污泥絮体的样品的量在本发明的监测系统中都远远少于传统监测方法,这样产生的废液也微乎其微。
25.本发明中的基于微流控芯片观测絮体污泥的装置及方法具有很强的可操作性和兼容性。监测系统不止可以使用奥林巴斯荧光倒置显微镜,还能够兼容很多其他显微镜,这样就可以得到关于污泥絮体初始颗粒化的更多图像信息。
26.本发明中的基于微流控芯片观测絮体污泥的装置及方法在监测开始阶段具有主动选择监测对象的优势。传统观测手段从取样到监测前是无法对监测对象事先预判的,而本发明具有实时性和原位性特征,所以在使用微型注射泵将污泥絮体推入芯片时,在计算机显示器上便可观察到污泥絮体的情况,可以挑选易于观察、生长状态良好的污泥絮体,如果没有,便可以继续启动微型注射泵,直至找到为止。
27.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
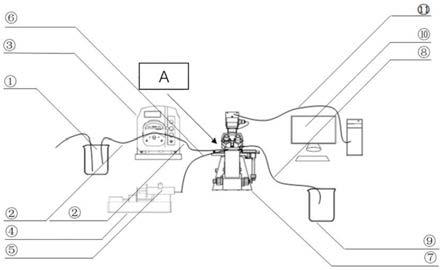
28.图1为本发明的基于微流控芯片原位成像技术的观测装置的系统结构示意图;
29.图2为图1a方向的向视图;
30.图3为图2pdms微流控芯片通道微观结构图;
31.图中:1、营养基质装置;2、蠕动管;3、第一给料机构;4、第二给料机构;5、原液储放容器;6、进样管;7、观测件;8、出液管;9、收集装置;10、上位计算机;11、数据传输线;12、微流控芯片;13、微流控芯片通道。
具体实施方式
32.下面详细描述本发明的实施例,所述实施例的示例在附图中表示,其中自始至终相同或类似的符号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解对本发明的限制。
33.需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴
向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
34.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
35.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
36.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以
37.是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
38.如图1所示的一种基于微流控芯片观测絮体污泥的装置,包括营养基质装置1、第一给料机构3、蠕动管2、第二给料机构4、原液储放容器5、进样管6、微流控芯片12、观测件7、上位计算机10、出液管8、收集装置9、数据传输线11。第一给料机构3可以采用蠕动泵,第二给料机构4可以采用微型注射泵。原液储放容器5可以采用注射器,观测件7可以采用奥林巴斯荧光倒置显微镜tx73+dp。微流控芯片12为pdms芯片,芯片采用单条通道,如图2所示,微流控芯片通道13,微流控芯片12具有第一入口、第二入口和出口,营养基质装置1用于储放营养基质,营养基质装置1通过蠕动管2与微流控芯片12的第一入口连通,第一给料机构3用于将营养基质装置1中的营养基质传送至微流控芯片12的第一入口;
39.原液储放容器5用于储放污泥絮体样本,原液储放容器5通过进样管6与微流控芯片12第二入口连通,第二给料机构4用于将污泥絮体样本从原液储放容器5中传送至微流控芯片12的第二入口;
40.出液管8与微流控芯片12的出口连接,另一端连入收集装置9;
41.观测件7用于对微流控芯片12内物质进行观测,上位计算机10与观测件7通过数据传输线连接,微流控芯片12置于荧光倒置显微镜7观测平台上。
42.一种基于微流控芯片观测絮体污泥的方法,探究剪切力对于絮体污泥初始颗粒化的影响的方法具体实施步骤如下:
43.按上述说明将整个监测系统搭建并连接好;
44.(1)本实施例中芯片采用pdms材质,如图2所示,微流控芯片通道13pdms芯片通道的长
×
宽
×
高尺寸为5cm
×
600μm
×
600μm;本案例采用凹槽式结构来捕获污泥絮体,凹陷深度为60μm,凹槽的具体形状结构和尺寸大小如图3所示,图中尺寸标注单位为微米;
45.(2)用原液储放容器5取好相应的污泥絮体样本,接着按照cod:n:p=100:5:1的比
例配制cod浓度为500mg/l的营养基质溶液1l,放在1l的烧杯中,并使用曝气泵对营养基质曝气,用溶解氧仪测定使得基质溶解氧为7
‑
8mg/l;
46.(3)打开奥林巴斯荧光倒置显微镜7,选择显微镜明场模式,打开连接荧光倒置显微镜7的上位计算机10,在电脑上运行cellsensstandard软件;
47.(4)启动蠕动泵3,泵轴转速调至3rpm,使得微流控芯片12充满营养基质溶液,判断依据是出液管8持续稳定的向收集装置9中滴液,随后停止蠕动泵3;
48.(5)打开微型注射泵4,匀速将污泥絮体通过原液储放容器5推入微流控芯片12中,关闭微型注射泵4,通过移动荧光倒置显微镜7平台,调节荧光倒置显微镜7的焦距以及物镜倍数,观察到微流控芯片12内部通道有5处成功捕获到大小合适且成像清晰的污泥絮体;
49.(6)启动蠕动泵3,将泵轴转速调节至0.5rmp,随后每隔1h通过上位计算机10软件cellsensstandard对5处污泥絮体监测并进行编号并拍照;
50.(7)重复上述步骤,获得50处污泥絮体对象在蠕动泵3转速0.5rmp下连续12小时的生长图像;
51.(8)在步骤(6)中改变蠕动泵3转速为1rmp、1.5rpm、2.0rmp、2.5rmp、3.0rmp,并在这些转速下分别重复步骤(1)
‑
(7);
52.(9)将所有污泥絮体对象在所有蠕动泵3泵轴转速下的所有时间点上的照片进行图像处理,观察并分析污泥絮体初始颗粒化受剪切力的影响。
53.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1