一种获取距离信息的探测方法及探测系统与流程
1.本技术涉及探测技术领域,特别涉及一种获取距离信息的探测方法及探测系统。
背景技术:
2.作为一种在场景中测量与物体相距距离的方法,飞行时间(tof)技术被开发出来。这种tof技术可以应用于各种领域,如汽车工业、人机界面、游戏、机器人和安防等等。一般来说,tof技术的工作原理是用光源发出的已调制光照射场景,并观察场景中物体反射的反射光。而在现有探测系统中为了保证探测过程中可以获得更高的探测效率同时也保证探测系统具有更宽广的视野,目前采用较多的是一种阵列型接收模块,阵列型接收模块中可以有成千上万的像素单元,每个像素单元可以为电荷耦合半导体ccd或者互补金属氧化物半导体cmos型等等类型的二极管,此处并不限定只以此两种类型二极管组成阵列型接收模块。
3.为了获得距离信息,在tof进行探测中的间接先获得发射光和返回光的延时信息,进而获得延时相位或者称为相位偏移,再将相位偏移转化为最终的结果信息,这种方法将被探测物的距离信息转化为返回光和发射光相位偏移而非直接给出距离结果,此方案称为间接飞行时间测距(itof)。在实际的使用中可以使用互补相位接收返回光信号,进而获得距离信息此种方法称为两相位方案,也有利用四相位0
°
、90
°
、180
°
和270
°
的四相位获取目标距离的方案,当然也有文献尝试3相位甚至5相位方案获取被探测物距离的方案,获得相位偏移的电信号,需要对于该电信号经过处理单元进行处理得到最终的距离信息,但是实际获得返回光信号对应的电信号由于环境因素,包括但不限于温度和环境照明条件。例如,传感器阵列中的温度变化可以增加像素的所谓暗电流,暗电流又可以改变测量的相位偏移,如此体现在测量的结果上将会呈现出较大的距离波动。由于上述因素的影响被探测物体的真实距离和实测距离的统计结果是非线性的。因此,在对待测物体进行测距时,经常需要先在实验室对各种距离进行标定,利用该实验的测试结果对非线性规律进行拟合,得到一条非线性校正函数。目前最长用的拟合方法是最小二乘法,但是最小二乘法存在最小值和极值的误解,极值不一定是最小值,而最小二乘法直接将极小值作为最小值有失偏颇;最小二乘法直接求解导数,不一定所有函数在有意义的空间中都有导数;对于参数个数大于方程个数的情况下无解析解;而且在实际测距中,由于校正函数较为复杂,拟合速度较慢,尤其是芯片为阵列型芯片时,得到整个芯片非线性校正函数需要较长的时间。所以亟需寻求一种新的方法来快速的得到校正函数,提高测距效率。
4.在上述的分析中设计一种获取距离信息的探测方法及探测系统,以准确高效地输出视场内各个距离范围内被探测物的距离结果是亟待解决的技术问题。
技术实现要素:
5.本技术的目的在于,针对上述现有技术中的不足,提供一种获取距离信息的探测方法及探测系统,准确高效地输出视场内各个距离范围内被探测物的距离结果。
6.为实现上述目的,本技术实施例采用的技术方案如下:
7.本技术实施例第一方面提供了一种获取距离信息的探测方法包含光源模块,用于向待被探测物体发射探测光;接收模块,用于接收待测物反射的返回光信号,并转化为电信号;处理模块,依据所述接收模块获取的返回光信号转化的电信号获得被探测物的距离;所述处理模块包含有用于校正被探测物距离的残差函数。
8.可选地,所述残差函数通过标定获得,所述残差函数为被探测物体的实际距离与实测距离的差。
9.可选地,对标定获得所述残差函数进行频域转换,通过频域的幅值与对应的频率、相位拟合获得用于校正被探测物体实测距离的残差函数。
10.可选地,所述用于拟合残差函数的幅值与对应的频率、相位依次为最大幅值与其对应的频率、相位。
11.可选地,依次选取频域中前5~8个最大幅值与其对应的频率、相位用于拟合所述残差函数。
12.可选地,所述残差函数具有周期性规律。
13.第二方面,本发明提出一种使用第一方面的探测方法的探测系统,包含光源模块,用于向待被探测物体发射探测光;接收模块,用于接收待测物反射的返回光信号,并转化为电信号;处理模块,依据所述接收模块获取的返回光信号转化的电信号获得被探测物的距离;所述处理模块包含有用于校正被探测物距离的残差函数。
14.可选地,所述残差函数通过标定获得,所述残差函数为被探测物体的实际距离与实测距离的差。
15.可选地,对标定获得所述残差函数进行频域转换,通过频域的幅值与对应的频率、相位拟合获得用于校正被探测物体实测距离的残差函数。
16.可选地,所述用于拟合残差函数的幅值与对应的频率、相位依次为最大幅值与其对应的频率、相位。
17.本技术的有益效果是:
18.本技术实施例提供的一种获取距离信息的探测方法,包含光源模块,用于向待被探测物体发射探测光;接收模块,用于接收待测物反射的返回光信号,并转化为电信号;处理模块,依据所述接收模块获取的返回光信号转化的电信号获得被探测物的距离;所述处理模块包含有用于校正被探测物距离的残差函数,通过本发明的方案,可以快速便捷的得到残差函数用于校准被探测物体的实测距离,以准确高效地输出视场内各个距离范围内被探测物的距离结果。
附图说明
19.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
20.图1为现有技术提供的一种探测系统工作原理的示意图;
21.图2为本技术实施例提供的一种实测结果图;
22.图3为现有技术提供的一种最小二乘法的拟合示意图;
23.图4为本技术实施例提供的一种残差示意图;
24.图5为本技术实施例提供的一种调整过的残差曲线图;
25.图6为本技术实施例提供的残差函数的幅值和频率的对应关系;
26.图7为本技术实施例提供的残差函数与拟合残差函数的对比示意图;
27.图8为本技术实施例提供的残差函数与拟合残差函数差的示意图;
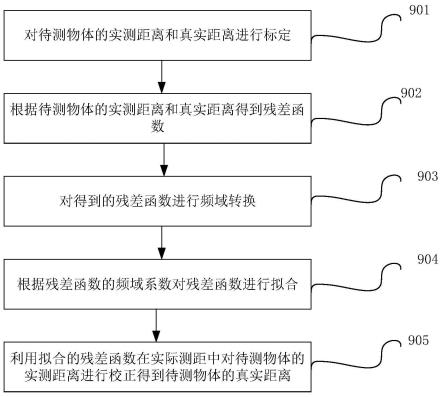
28.图9为本技术实施列提供的一种获取距离信息的工作流程。
具体实施方式
29.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
30.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
31.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
32.图1为现有技术提供的一种探测系统工作原理的示意图;目前采用的探测系统基本包括:光发射模块、处理模块、以及光接收模块,此处以itof测距为例进行说明,光发射模块包括但不仅限于半导体激光器、固体激光器、也可包括其他类型的激光器,当采用半导体激光器作为光源时,可以采用垂直腔面发射激光器vcsel(vertical-cavity surface-emitting laser)或者边发射半导体激光器eel(edge-emitting laser),此处仅为示例性说明并不作具体限定,光发射模块发射出正弦波或者方波或者三角波等等,在测距应用中多为具有一定波长的激光,例如950nm等等的红外激光(最优地为近红外激光),发射光被投射向视场内,视场内存在的被探测物可以反射投射的激光进而形成返回光,返回光进入探测系统中被光接收模块捕获,所述光接收模块可以包含光电转化部,例如cmos、ccd等等组成的阵列型传感器,还可以包含多个镜头可以形成多于一个的像平面,也就是接收模块包含了多于一个的像平面,接收模块的光电转化部位于之一的像平面处,其可以最常用的四相位方案接收而获得0
°
、90
°
、180
°
和270
°
的延时接收信号,利用四相为的距离计算方案此处以正弦波的方法为示例进行说明,在四个等距点(例如90
°
或1/4λ的间隔)测量接收信号的幅度:
[0033][0034]
a1和a3的差值与a2和a4的差值的比等于相位角的正切值。arctan实际上是双变量反正切函数,可映射至适当的象限,当a2=a4并且a1》a3或a3》a1时,分别定义为0
°
或180
°
。
[0035]
到目标物的距离由以下公式确定:
[0036][0037]
至此,还需要确定发射激光的频率即可来进行距离测算,其中c是光速,是相位角(以弧度来度量),f是调制频率。通过上述的方案可以实现对于视场内被探测物的距离探测的效果,这一方案被称为四相位延时方案获得探测结果,当然接收模块光电转化生成不同的信息,在某些情况下也使用0
°
和180
°
两相位方案实现被探测物的信息获取,也有文献公开了0
°
、120
°
和240
°
三相位获得目标信息,甚至有文献也公开了五相位差延时方案,本发明并不具体限定,在实际测量中也有使用方波进行探测的,其机理与正弦波类似,只是计算公式有差异此处不再详细赘述。
[0038]
获得相位偏移的电信号,需要对于该电信号经过处理单元进行处理得到最终的距离信息,但是实际获得返回光信号对应的电信号由于环境因素,包括但不限于温度和环境照明条件,以及探测电路本身的因素。例如,传感器阵列中的温度变化可以增加像素的所谓暗电流,暗电流又可以改变测量的相位偏移,如此体现在测量的结果上将会呈现出较大的距离波动,而实际的探测中发射光的具有较的频率例如20mhz、40mhz、80mhz等等,加上数据传输和数据处理的时间可以在1s内获得几十次的探测结果,例如高于人眼静态条件下可辩别的30次的结果刷新,在一些特殊的场景下距离的刷新频率将更高例如达到120次等等,在这种情况下对于一个位置不变的物体距离实际在传感器阵列传递的信号转化的距离结果处于变化之中,需要一种特定的转化关系对于这种由于前述的暗电流等影响进行消除,以获得准确的探测距离。
[0039]
图2为本技术实施例提供的一种实测结果图;如图2所示横坐标为待测物体的真实距离,纵坐标为待测物体的实测距离。在理想情况下,真实距离和实测距离应该是一样的,但是从图2可以看出真实距离和实测距离由于上述的各种不理想因素的影响,真实距离和实测距离的统计结果是非线性的。因此,在对待测物体进行测距时,经常需要先在实验室对各种距离进行标定,利用该实验的测试结果对非线性规律进行拟合,得到一条非线性校正函数,
[0040]
y=f(x)
[0041]
其中x为实测距离,y为对应的真实距离。
[0042]
在实际测距时,利用该非线性校正函数对测距结果进行校正,以得到更为准确的测距结果。
[0043]
根据标定实验的测试结果拟合非线性校正函数时,利用常见的拟合方法,例如最小二乘拟合可以得到精度较高的结果。
[0044]
需要特别说明的是图2中201和202曲线的突变是由于实际的相位信号是重复的例如2kπ+p1(相位)与p1(相位)对应的探测结果是相同的而引起的。
[0045]
图3为现有技术提供的一种最小二乘法的拟合示意图;最小二乘法是一种熟悉而优化的方法。主要是通过最小化误差的平方以及最合适数据的匹配函数。
[0046]
最小二乘法的特点是:(1)利用最小二乘法可以得到位置数据(这些数据与实际数据之间误差平方和最小)
[0047]
(2)可以用来曲线拟合
[0048]
如图2所示,有一组数据(1,6),(3,5),(5,7),(6,12),要找出一条与这几个点最为匹配的直线:y=a+bx
[0049]
有如下方程:
[0050]
6=a+b
[0051]
5=a+3b
[0052]
7=a+5b
[0053]
12=a+6b
[0054]
很明显上面方程是超定线性方程组,要使左边和右边尽可能相等;采用最小二乘法:
[0055]
l(a,b)=[6-(a+b)]^2+[5-(a+3b)]^2+[7-(a+5b)]^2+[12-(a+6b)]^2使得l的值最小:这里l是关于a,b的函数;那么我们可以利用对a,b求偏导,进而求出a,b的值使得lmin
[0056][0057][0058]
b=-0.064,a=8.832
[0059]
y=8.832-0.064*x
[0060]
即图3中所示的直线301,也就是说这条直线是最佳的。求得最适合数学模型,然后可以更加准确预测数据。
[0061]
将一个可能的、对不相关变量a的构成都无困难的函数类型称作函数模型如抛物线函数或指数函数;参数b是为了使所选择的函数模型同观测值y相匹配。在一般情况中,观测值远多于所选的参数个数。
[0062]
在回归过程中,回归的关联式是不可能全部通过每个回归数据点(x1,y1、x2,y2
…
xm,ym),为了判断关联式的好坏,可借助相关系数“r”,统计量“f”,剩余标准偏差“s”进行判断;“r”越趋近于1越好;“f”的绝对值越大越好;“s”越趋近于0越好。
[0063]
最小二乘法拟合有一定的不足之处,如,最小二乘拟合存在最小值和极值的误解,极值不一定是最小值,而最小二乘法直接将极小值作为最小值有失偏颇;最小二乘法直接求解导数,不一定所有函数在有意义的空间中都有导数;对于参数个数大于方程个数的情况下无解析解;而且在实际测距中,由于校正函数较为复杂,拟合速度较慢,尤其是芯片为阵列型芯片时,得到整个芯片非线性校正函数需要较长的时间。所以亟需寻求一种新的方法来快速的得到校正函数,提高测距效率。
[0064]
图4为本技术实施例提供的一种残差示意图:
[0065]
y=x+g(x)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0066]
其中x为实测距离,y为对应的实际距离,g(x)为残差y-x对x的拟合函数。将实测距离减去真实距离,可以得到测距残差的曲线图,如图4所示。在图4中之所以出现断层的现象和图2中的曲线突变原因是一样的,也就是实际的相位信号是重复的例如2kπ+p1(相位)与p1(相位)对应的探测结果是相同的而引起的,也可以理解为itof相位测距具有对最远测距进行取模的规律。图4中的残差曲线是在最远测距距离为7.5m的条件下得到的。当然在其他实施例中最远测距距离并不局限于7.5m。为了将残差结果调整到一个相同的范围内,在图4
所示的残差曲线中将小于0m的部分+7.5m(或将将大于0m的部分-7.5m)可以得到如图5所示的残差曲线。从图5我们可以看出调整后的残差函数有周期规律。从公式1可以看出通过测量得到实测距离x,如果能通过一定方法得到残差函数g(x),就可以通过公式1得到待测物体的实际距离。从图5可以看出残差函数有周期规律,对图5所示的残差函数进行频域分析,频域分析可以是傅里叶变换,小波变化,拉普拉斯变换等。这里以傅里叶变换为例来说明,但是并不局限于傅里叶变换。对图5所示的残差函数进行傅里叶变换可以得到如图6所示的频率以及相应幅值的对照表。图7是根据图6所示的频率、相位和幅值对残差函数进行恢复。如图7所示依次选取幅值最大的频率、相位对残差函数进行恢复,如图7所示7011为实测数据和真实距离得到的残差函数曲线,7012为选取图6中幅值最大的0.9798和对应的频率、相位对残差函数恢复的结果。依次类推7021为实测数据和真实距离得到的残差函数曲线,7022为选取图6中幅值最大的0.9798,第二大幅值0.1406和它们对应的频率、相位对残差函数恢复的结果;7031为实测数据和真实距离得到的残差函数曲线,7032为选取图6中幅值最大的0.9798,第二大幅值0.1406,第三大幅值0.0858和它们对应的频率、相位对残差函数恢复的结果;7041为实测数据和真实距离得到的残差函数曲线,7042为选取图6中幅值最大的0.9798,第二大幅值0.1406,第三大幅值0.0858,第四大幅值0.0348和它们对应的频率、相位对残差函数恢复的结果;7051为实测数据和真实距离得到的残差函数曲线,7052为选取图6中幅值最大的0.9798,第二大幅值0.1406,第三大幅值0.0858,第四大幅值0.0348,第五大幅值0.0183和它们对应的频率、相位对残差函数恢复的结果;7061为实测数据和真实距离得到的残差函数曲线,7062为选取图6中幅值最大的0.9798,第二大幅值0.1406,第三大幅值0.0858,第四大幅值0.0348,第五大幅值0.0183,第六大幅值0.0108和它们对应的频率、相位对残差函数恢复的结果;7071为实测数据和真实距离得到的残差函数曲线,7072为选取图6中幅值最大的0.9798,第二大幅值0.1406,第三大幅值0.0858,第四大幅值0.0348,第五大幅值0.0183,第六大幅值0.0108,第七大幅值0.0092和它们对应的频率、相位对残差函数恢复的结果;7081为实测数据和真实距离得到的残差函数曲线,7082为选取图6中幅值最大的0.9798,第二大幅值0.1406,第三大幅值0.0858,第四大幅值0.0348,第五大幅值0.0183,第六大幅值0.0108,第七大幅值0.0092,第八大幅值0.0063和它们对应的频率、相位对残差函数恢复的结果。从图7可以看出7052,7062,7072,7082都可以很好的恢复出了了残差函数,也就是说用5~8个图6中最大的幅值和对应的频率、相位就可以很好的恢复出残差函数。图8从另外一个方面也说明了这个结果。如图8所示801为图7中7011与7012的差,依次类推802为图7中7021与7022的差,803为图7中7021与7022的差,804为图7中7041与7042的差,805为图7中7051与7052的差,806为图7中7061与7062的差,807为图7中7071与7072的差,808为图7中7081与7082的差。从图8也可以看出用5~8个图6中最大的幅值和对应的频率、相位就可以很好的恢复出残差函数。公式(2)是用8个幅值和对应的频率恢复的残差函数,残差的拟合函数为:
[0067][0068]
其中参数ak,fk,pk为基于傅里叶变换方法计算得到的结果。在后续的实际测量中就可以使用残差拟合函数和实测距离得到待测物体的真实距离,提高测距精度。
[0069]
图9为本技术实施列提供的一种获取距离信息的工作流程。如图9所示包含:
[0070]
s901:对待测物体的实测距离和真实距离进行标定;
[0071]
s902:根据待测物体的实测距离和真实距离得到残差函数;
[0072]
s903:对得到的残差函数进行频域转换;
[0073]
s904:根据残差函数的频域系数对残差函数进行拟合;
[0074]
s905:利用拟合的残差函数在实际测距中对待测物体的实测距离进行校正得到待测物体的真实距离;
[0075]
需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0076]
以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1