风速检测系统以及风速检测方法与流程
1.本发明是有关于一种检测技术,且特别是有关于一种风速检测系统以及风速检测方法。
背景技术:
2.无人机的飞行速度检测可利用一般的皮托管(pitot)装置来进行风速检测,再利用风速值来换算无人机的飞行速度,以避免无人机被不当操作而导致超速或失速。对此,基于传统的皮托管装置设计,一般的无人机的飞行速度检测无法自动地判断检测系统是否正常或是导管是否阻塞,因此现有的无人机需要在起飞后才可能发现皮托管装置异常或导管阻塞,造成飞行速度的检测结果值异常,甚至可能会酿成飞安事件。此外,传统的皮托管装置也无自动排除阻塞物的功能。有鉴于上述各点,以下将提出几个实施例的解决方案。
3.本“背景技术”段落只是用来帮助了解本
技术实现要素:
,因此在“背景技术”段落所揭露的内容可能包含一些没有构成本领域技术人员所知道的习知技术。在“背景技术”段落所揭露的内容,不代表该内容或者本发明一个或多个实施例所要解决的问题,在本发明申请前已被本领域技术人员所知晓或认知。
发明内容
4.本发明提供一种适用于无人机的风速检测系统以及风速检测方法可自动地判断系统是否正常或管道是否阻塞。
5.本发明的其他目的和优点可以从本发明所揭露的技术特征中得到进一步的了解。
6.为达上述之一或部分或全部目的或是其他目的,本发明的风速检测系统适用于无人机。风速检测系统包括管体、压力感测模块、抽气泵以及控制器。管体具有第一开口以及第二开口。压力感测模块经由第一管道与第一开口连接,并且经由第二管道与第二开口连接。第一管道的一区段具有主要管道,并且第一替代管道的两端分别连接主要管道的两端。抽气泵设置在第一替代管道中。控制器耦接压力感测模块以及抽气泵。当控制器执行自我检测操作时,主要管道被封闭,并且第一替代管道被导通,控制器启动抽气泵进行正向抽气。控制器透过压力感测模块经由第一管道测得第一气体压力,并且经由第二管道测得第二气体压力。控制器依据第一气体压力以及第二气体压力计算参考风速值。
7.为达上述之一或部分或全部目的或是其他目的,本发明的风速检测方法适用于无人机的风速检测系统。风速检测系统包括管体、压力感测模块以及抽气泵。管体具有第一开口以及第二开口。压力感测模块经由第一管道与第一开口连接,并且经由第二管道与第二开口连接。第一管道的一区段具有主要管道,并且第一替代管道的两端分别连接主要管道的两端。抽气泵设置在第一替代管道中。风速检测方法包括以下步骤:当风速检测系统进行自我检测操作时,封闭主要管道,并且导通第一替代管道;启动抽气泵进行正向抽气;透过压力感测模块经由第一管道测得第一气体压力,并且经由第二管道测得第二气体压力;依据第一气体压力以及第二气体压力计算参考风速值。
8.基于上述,本发明的适用于无人机的风速检测系统以及风速检测方法可利用在管道中增设的替代管道以及抽气泵进行自我检测操作,以使风速检测系统可自动地判断系统是否正常或管道是否阻塞。
9.为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合所附图式作详细说明如下。
附图说明
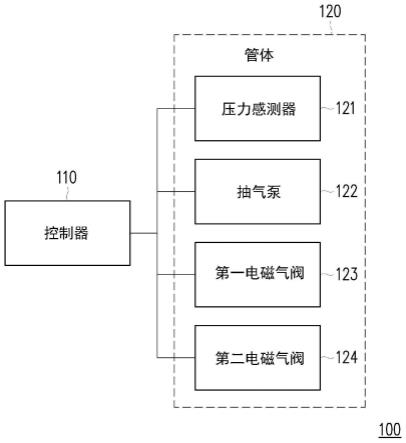
10.图1是本发明的一实施例的风速检测系统的电路示意图。
11.图2a是本发明的一实施例的无人机的示意图。
12.图2b是本发明的另一实施例的无人机的示意图。
13.图3是本发明的一实施例的风速检测系统进行自我检测操作的情境示意图。
14.图4是本发明的一实施例的风速检测方法的流程图。
15.图5是本发明的一实施例的风速检测系统进行正常检测操作的情境示意图。
16.图6是本发明的一实施例的正常检测操作的流程图。
17.图7是本发明的一实施例的风速检测系统进行清通管道操作的情境示意图。
18.图8是本发明的一实施例的清通管道操作的流程图。
具体实施方式
19.有关本发明的前述及其他技术内容、特点与功效,在以下配合参考图式的一优选实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附加图式的方向。因此,使用的方向用语是用来说明并非用来限制本发明。
20.为了使本发明的内容可以被更容易明了,以下特举实施例做为本发明确实能够据以实施的范例。另外,凡可能之处,在图式及实施方式中使用相同标号的元件/构件/步骤,系代表相同或类似部件。
21.图1是本发明的一实施例的风速检测系统的电路示意图。参考图1,风速检测系统100包括控制器110、管体120、压力感测器121、抽气泵122、第一电磁气阀123以及第二电磁气阀124,其中压力感测器121、抽气泵122、第一电磁气阀123以及第二电磁气阀124设置在管体120中。控制器110耦接(电连接)压力感测器121、抽气泵122、第一电磁气阀123以及第二电磁气阀124。在本实施例中,管体120可具有多个管道的风速测管结构,其中管体120可例如是本发明改良的一种皮托管(pitot)装置。在本实施例中,控制器110可透过操作设置在管体120的多个管道中的抽气泵122、第一电磁气阀123以及第二电磁气阀124,以及利用压力感测器121来自动地判断风速检测系统100是否正常或管道是否阻塞。
22.在本实施例中,风速检测系统100适于设置在无人机中,并且用于提供即时的风速检测功能。在本实施例中,控制器110可为无人机的控制核心电路或是额外的控制晶片,以将风速检测结果提供至无人机的控制核心电路。如此一来,控制器110或无人机的控制核心电路可依据风速检测结果执行相关飞行控制或飞行判断作业,而本发明并不加以限制。在本实施例中,控制器110可包括具有运算功能的中央处理单元(central processing unit,cpu),或是其他可程式化的一般用途或特殊用途的微处理器(microprocessor)、数位信号
处理器(digital signal processor,dsp)、可程式化控制器、专用集成电路(application specific integrated circuits,asic)、可程式化逻辑装置(programmable logic device,pld)、其他类似处理装置或这些装置的结合。所述运算功能可例如是指如本发明各实施例所述的相关气体压力值及风速值计算。
23.在本实施例中,压力感测器121为一种气体压力量测装置,压力感测器121可设置在一或多个中空腔体中,并且可量测中空腔体的气体压力值。控制器110可利用气体压力值来换算对应的风速值。在本实施例中,抽气泵122设置在管道中,并且具有正向抽气功能以及反向抽气功能。此外,抽气泵122还具有阀门机构。当抽气泵122未作动时,抽气泵122的阀门机构可关闭以封闭管道。在本实施例中,第一电磁气阀123以及第二电磁气阀124可设置在不同管道中,并且分别具有阀门机构,以使控制器110可透过操作第一电磁气阀123以及第二电磁气阀124来导通或封闭各自设置的管道。
24.图2a是本发明的一实施例的无人机的示意图。参考图1以及图2a,无人机200具有本体210以及机翼220,并且本体210前端为机头211。机翼220设置在本体210上。在本实施例中,管体120可设置在无人机200的机翼220上(迎风位置),以使无人机200在飞行过程中,风速检测系统100可有效地检测无人机200的风速,并且无人机200的核心控制电路可依据即时的风速检测结果来准确地判断当前飞行速度。
25.图2b是本发明的另一实施例的无人机的示意图。参考图1以及图2b,无人机200’具有本体210以及机翼220,并且本体210前端为机头211。机翼220设置在本体210上。在本实施例中,管体120’可设置在无人机200’的机头211上(迎风位置),以使无人机200’在飞行过程中,风速检测系统100可有效地检测无人机200’的风速,并且无人机200’的核心控制电路可依据即时的风速检测结果来准确地判断当前飞行速度。
26.图3是本发明的一实施例的风速检测系统进行自我检测操作的情境示意图。图4是本发明的一实施例的风速检测方法的流程图。参考图3,管体120具有第一开口a1、第二开口a2、第三开口a3、第一管道l1、第二管道l2以及压力感测模块130。压力感测模块130包括压力感测器121、第一中空腔体k1以及第二中空腔体k2。压力感测器121设置在第一中空腔体k1以及第二中空腔体k2之间,以隔绝第一中空腔体k1以及第二中空腔体k2。压力感测器121可分别感测第一中空腔体k1以及第二中空腔体k2的空气压力。在本实施例中,压力感测模块130的第一中空腔体k1经由第一管道l1与第一开口a1连接,并且经由第二管道l2与第二开口a2连接。第一管道l1的一区段为主要管道l1a,并且第一替代管道l3的两端分别连接主要管道l1a的两端。所述区段位于第一管道l1从第一开口a1至第一中空腔体k1之间的一部分管道。在本实施例中,第三开口a3经由第二替代管道l4连接第一替代管道l3。
27.在本实施例中,抽气泵122设置在第一替代管道l3。第一电磁气阀123设置在主要管道l1a。第二电磁气阀124设置在第二替代管道l4中。附带一提的是,在本发明的一些实施例中,第一开口a1、第二开口a2以及第三开口a3可分设在管体120的不同方位的位置,但本发明并不加以限制。举例而言,第一开口a1可设置在管体120的朝向无人机的飞行前进方向d1(示于图2a以及图2b)的位置。第二开口a2以及第三开口a3可分别设置在垂直于无人机的飞行前进方向d1的不同位置。
28.参考图1、图3及图4,本实施例的风速检测系统100可执行以下步骤s410~s450,以执行自我检测操作。在步骤s410,当风速检测系统100进行自我检测操作时,封闭主要管道
l1a,并且导通第一替代管道l3。在本实施例中,控制器110可控制第一电磁气阀123以及第二电磁气阀124为关闭,以使第一电磁气阀123的阀门123b封闭主要管道l1a,并且第二电磁气阀124的阀门124b封闭第二替代管道l4。控制器110可控制抽气泵122的阀门122b为开启,以使第一替代管道l3为导通。在步骤s420,风速检测系统100的控制器110可启动抽气泵122进行正向抽气。如图3所示,正向抽气为抽气泵122将外部空气由第一开口a1吸入并经由第一管道l1的一区间(介于第一开口a1与主要管道l1a之间的管道部分)以及第一替代管道l3至第一中空腔体k1。
29.在步骤s430,风速检测系统100的控制器110可透过压力感测模块130经由第一管道l1测得第一气体压力(pt),并且经由第二管道l2测得第二气体压力(ps)。在步骤s440,风速检测系统100的控制器110可依据第一气体压力(pt)以及第二气体压力(ps)计算参考风速值。在本实施例中,控制器110可例如执行以下公式(1)的运算,以取得参考风速值(v),其中r为空气密度。
[0030][0031]
在步骤s450,风速检测系统100的控制器110可依据参考风速值(v)判断风速检测系统100是否正常。在本实施例中,上述的自我检测操作可以是操作在无人机起飞前。风速检测系统100可透过自我检测操作来有效地判断风速检测系统是否正常或第一管道l1及/或第二管道l2是否阻塞。并且,当风速检测系统100的控制器110判断系统异常时,控制器110可输出警示信号至使用者使用的控制装置上(未显示),以提醒使用者可进行故障排除或让无人机暂时不起飞。
[0032]
举例而言,由于抽气泵122的抽气程度为控制器110已知的设定,因此控制器110可透过判断参考风速值是否符合预期风速值,以判断风速检测系统100是否正常。对此,本发明各实施例所述的风速检测系统100正常可例如是指抽气泵122可正常运作、电磁气阀可正常运作、管道并未阻塞及破损,及/或无人机飞行正常等情况,且本发明并不限于此。风速检测系统100不正常可例如是指抽气泵122可无法正常运作、电磁气阀无法正常运作、管道阻塞或破损,及/或无人机飞行异常等情况,且本发明亦不限于此。因此,当参考风速值在预设风速范围内,例如,参考风速值高于或等于第一预设风速值并低于或等于第二预设风速值,表示风速检测系统100正常。当参考风速值不在预设风速范围内,例如,参考风速值低于第一预设风速值或高于第二预设风速值,表示风速检测系统100异常。或者,控制器110可判断参考风速值是否低于第一预设风速值,以判断第一管道l1发生阻塞。又或者,控制器110可判断参考风速值是否高于第二预设风速值,以判断第二管道l2发生阻塞。
[0033]
图5是本发明的一实施例的风速检测系统进行正常检测操作的情境示意图。图6是本发明的一实施例的正常检测操作的流程图。图5的管体120与图3的管体120具有相同管道及元件配置,因此不再赘述。参考图1、图5及图6,本实施例的风速检测系统100可执行以下步骤s610~s630,以执行正常检测操作。在步骤s610,当风速检测系统100进行正常检测操作时,导通主要管道l1a,并且封闭第一替代管道l3。在本实施例中,控制器110可控制抽气泵122的阀门122b为关闭,以使第一替代管道l3为封闭。控制器110可控制第二电磁气阀124的阀门124b为关闭,以使第二替代管道l4为封闭。控制器110可控制第一电磁气阀123的阀门123b为开启,以使主要管道l1a为导通。
[0034]
在步骤s620,风速检测系统100的控制器110可透过压力感测模块130经由第一管道l1测得另一第一气体压力(pt’),并且经由第二管道l2测得另一第二气体压力(ps’)。在步骤s630,风速检测系统100的控制器110可依据另一第一气体压力(pt’)以及另一第二气体压力(ps’)计算风速值(v’)。在本实施例中,控制器110可例如执行类似于上述公式(1)的计算来取得风速值。并且,上述的正常检测操作可以是操作在无人机起飞前或无人机飞行中,以使无人机可有效地判断当前风速值以及可换算正确的飞行速度。另外,在本发明的一些实施例中,风速检测系统100的控制器110还可依据风速值判断风速检测系统100是否正常或无人机是否被正常操控而飞行。当风速值在预设风速范围内,例如,风速值高于或等于第一预设风速值并低于等于第二预设风速值,表示风速检测系统100正常。当风速值不在预设风速范围内,例如,风速值低于第一预设风速值或高于第二预设风速值,表示风速检测系统100异常。举例而言,控制器110可判断风速值是否低于第一预设风速值,以判断第一管道l1发生阻塞或无人机操控不当(例如飞行速度过慢)。或者,控制器110可判断风速值是否高于第二预设风速值,以判断第二管道l2发生阻塞或无人机操控不当(例如飞行速度过快)。
[0035]
图7是本发明的一实施例的风速检测系统进行清通管道操作的情境示意图。图8是本发明的一实施例的清通管道操作的流程图。图7的管体120与图3的管体120具有相同管道及元件配置,因此不再赘述。参考图1、图7及图8,本实施例的风速检测系统100可执行以下步骤s810~s830,以执行清通管道操作。并且,本实施例的清通管道操作可适于在上述图4的步骤s450或上述图6的步骤s630之后执行,但本发明并不限于此。在步骤s810,风速检测系统100的控制器110可判断参考风速值或风速值是否高于第一预设风速值或低于第二预设风速值。若否,则控制器110可于经过预设时间区间后再次执行步骤s810,以递回地进行风速监测。若是,则控制器110执行步骤s820,在步骤s820,风速检测系统100的控制器110可执行清通管道操作,以封闭主要管道l1a,且导通第一替代管道l3以及第二替代管道l4。在本实施例中,控制器110可控制抽气泵122的阀门122b为开启,以使第一替代管道l3为导通。控制器110可控制第一电磁气阀123的阀门123b为关闭,以使主要管道l1a为关闭。控制器110可控制第二电磁气阀124的阀门124b为开启,以使第二替代管道l4为导通。
[0036]
在步骤s830,风速检测系统100的控制器110可启动抽气泵122进行反向抽气。如图8所示,反向抽气为抽气泵122将另一外部空气由第三开口a3吸入通过第二替代管道l4,并且将此另一外部空气经由第一替代管道l3以及第一管道l1的一区间,最后从第一开口a1排出。在本实施例中,抽气泵122反向抽气提供的压力值大于空气压力值,以使管道中的阻塞物(例如,露水、灰尘等)可排出。因此,在本实施例中,若第一管道l1的所述区间(介于第一开口a1与主要管道l1a之间的管道部分)具有阻塞物时,抽气泵122可自动地进行清通管道的排气操作。
[0037]
综上所述,本发明的适用于无人机的风速检测系统以及风速检测方法可利用特殊设计的管道设计,以及搭配抽气泵以及电磁阀门的操作来进行自我检测操作、正常检测操作以及清通管道操作,而可实现系统自动检测功能、自动风速检测功能以及自动清通管道功能。
[0038]
以上所述,仅为本发明的优选实施例而已,当不能以此限定本发明实施的范围,即所有依本发明权利要求书及发明说明内容所作的简单的等效变化与修饰,皆仍属本发明专利涵盖的范围内。另外本发明的任一实施例或权利要求不须达成本发明所揭露的全部目的
或优点或特点。此外,摘要部分和发明名称仅是用来辅助专利文件搜寻之用,并非用来限制本发明的权利范围。此外,本说明书或权利要求书中提及的“第一”、“第二”等用语仅用以命名元件(element)的名称或区别不同实施例或范围,而并非用来限制元件数量上的上限或下限。
[0039]
附图标记说明
[0040]
100:风速检测系统
[0041]
110:控制器
[0042]
120、120’:管体
[0043]
121:压力感测器
[0044]
122:抽气泵
[0045]
122b、123b、124b:阀门
[0046]
123:第一电磁气阀
[0047]
124:第二电磁气阀
[0048]
130:压力感测模块
[0049]
200、200’:无人机
[0050]
210:本体
[0051]
211:机头
[0052]
220:机翼
[0053]
a1:第一开口
[0054]
a2:第二开口
[0055]
a3:第三开口
[0056]
d1:飞行前进方向
[0057]
l1:第一管道
[0058]
l1a:主要管道
[0059]
l2:第二管道
[0060]
l3:第一替代管道
[0061]
l4:第二替代管道
[0062]
k1:第一中空腔体
[0063]
k2:第二中空腔体
[0064]
s410~s450、s610~s630、s810~s830:步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1