测量装置、测量系统及移动体运行方法与流程
1.本发明涉及一种测量装置、测量系统及移动体运行方法,优选适用于计算与电梯轿厢等移动体的移动有关的信息的测量装置、测量系统及移动体运行方法。
背景技术:
2.以往,在具有作为移动体的轿厢(以下记为“电梯轿厢”或“轿厢”)的电梯中,将限速器绳用作为用于监视电梯轿厢的位置、电梯轿厢的移动速度等的安全装置。
3.而且,近年来,已知有代替限速器绳的、以非接触方式测量电梯轿厢的位置及移动速度的传感器(以下记为“位置移动速度传感器”)。例如,在专利文献1中公开了一种光学式的位置移动速度传感器,该光学式的位置移动速度传感器通过设置在电梯轿厢上的图像传感器拍摄存在于井道内的结构物,测量电梯轿厢的位置和移动速度。在非接触式的位置移动速度传感器中,由于不需要限速器绳那样的长条状的结构物,因此具有提高安装性和维护性的效果,并且还具有不会发生由于滑动而产生的测量误差的效果。现有技术文献专利文献
4.专利文献1:国际公开第2019-239536号
技术实现要素:
发明所要解决的技术问题
5.然而,在电梯轿厢运行时,用于检测电梯轿厢的位置和移动速度的测量装置需要对轿厢安全地停靠在井道内的门区的情况进行检测,并进行控制使得在门区外时门的开闭装置不进行动作。然而,上述的现有的光学式的位置移动速度传感器基于由图像传感器拍摄到的结构物的图像的时间差分来相对地测量移动距离,并且只能通过与独立的其他结构组合来检测基准位置。因此,存在以下问题:难以从高速移动的电梯轿厢之上高速且高精度地测量设置在井道内的基准位置的绝对位置。
6.本发明是考虑到以上内容而完成的,本发明提出一种测量装置、测量系统及移动体运行方法,该测量装置、测量系统及移动体运行方法能够高速且高精度地测量移动体在移动路径上的绝对位置。用于解决技术问题的技术手段
7.为了解决上述问题,本发明中提供一种测量装置,设置于在移动路径上移动的移动体并测量所述移动体的位置,该测量装置包括:光发送部,该光发送部响应于以规定周期产生的选通信号,发送用于对在所述移动路径上沿与所述移动体的移动方向平行的第一方向进行配置的静止结构物进行照射的光;成像部,该成像部将通过所述光产生的来自所述静止结构物的散射光成像在拍摄面上;拍摄部,该拍摄部在由所述选通信号规定的曝光时间内获取成像在所述拍摄面上的所述散射光的光信号,并将其转换为电信号;以及图像处理部,该图像处理部以所述规定周期生成所述选通信号,并且对由所述成像部转换后得到
的所述电信号实施图像处理来生成拍摄图像,并基于所述拍摄图像计算与所述移动体的绝对位置有关的信息,所述图像获取部包括:标记识别处理,该标记识别处理中,当在所述拍摄图像中包含设置在所述静止结构物上的标记的图像时,通过利用该拍摄图像中的垂直于所述第一方向的第二方向上的明暗亮度变化来确定表示所述标记的绝对位置的基准的基准线;以及移动量计算处理,该移动量计算处理中计算所述移动体从由所述标记识别处理确定的所述基准线开始的移动量。
8.此外,为了解决上述问题,本发明中提供一种测量系统,测量在移动路径上移动的移动体的位置,该测量系统包括:测量装置,该测量装置设置在所述移动体上;以及标记,该标记在所述移动路径上沿与所述移动体的移动方向平行的第一方向配置的静止结构物上,沿所述第一方向每隔规定间隔至少分别设置有一个。在该测量系统中,所述测量装置包括:光发送部,该光发送部响应于以规定周期产生的选通信号,发送对在所述移动路径上沿与所述移动体的移动方向平行的第一方向进行配置的静止结构物进行照射的光;成像部,该成像部将通过所述光产生的来自所述静止结构物的散射光成像在拍摄面上;拍摄部,该拍摄部在由所述选通信号规定的曝光时间内获取成像在所述拍摄面上的所述散射光的光信号,并将其转换为电信号;以及图像处理部,该图像处理部以所述规定周期生成所述选通信号,并且对由所述成像部转换后的所述电信号实施图像处理来生成拍摄图像,并基于所述拍摄图像计算与所述移动体的绝对位置有关的信息,所述图像处理部包括:标记识别处理,该标记识别处理中,当在所述拍摄图像中包含任意一个所述标记的图像时,利用该拍摄图像中的垂直于所述第一方向的第二方向上的明暗亮度变化来确定表示所述标记的绝对位置的基准的基准线;以及移动量计算处理,该移动量计算处理中,计算所述移动体从由所述标记识别处理所确定的所述基准线开始的移动量。
9.此外,为了解决上述问题,本发明中提供一种使电梯轿厢返回到附近的楼层的、通过电梯系统进行的如下的移动体运行方法。这里,上述电梯系统构成为包括:标记,该标记在井道内沿与所述电梯轿厢的移动方向平行的第一方向配置的静止结构物上,沿所述第一方向,在各楼层之间至少设置有一个;测量装置,该测量装置设置在所述电梯轿厢上,对所述静止结构物进行拍摄,当在拍摄到的所述图像中包含所述标记的图像时,计算该标记的位置信息;电梯控制部,该电梯控制部控制所述电梯轿厢的动作;以及楼层高度信息,该楼层高度信息针对对应于每个所述楼层的所述标记,表示所述标记和所述楼层的位置信息。而且,该移动体运行方法包括:由所述电梯控制部使所述电梯轿厢移动到附近的所述标记的第一工序;由所述测量装置根据所述第一工序的移动目的地的所述标记的拍摄图像计算所述标记的位置信息的第二工序;由所述电梯控制部基于在所述第二工序中计算出的所述标记的位置信息和所述楼层高度表来计算从所述标记到所述楼层的移动距离的第三工序;以及由所述电梯控制部使所述电梯轿厢移动在所述第三工序中计算出的移动距离的第四工序。发明效果
10.根据本发明,能够高速且高精度地测量移动体在移动路径上的绝对位置。
附图说明
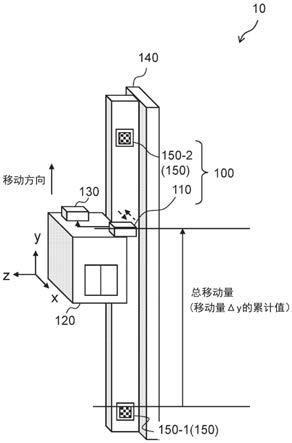
11.图1是示出本发明的实施方式1的电梯系统10的结构例的图。
图2是示出测量系统100的结构例的图。图3是示出图像处理部240的内部结构例的图。图4是示出图像处理部240的测量处理的处理工序例的流程图。图5是用于说明轿厢120移动时的拍摄图像的变化的图。图6是示出由控制部310发送到拍摄部230的选通信号的时序图的一个示例的图。图7是示出曝光时间中的拍摄图像的亮度分布的示例的图。图8是示出亮度标记150的具体示例的图。图9是示出亮度标记151的拍摄图像的亮度分布的一个示例的图。图10是用于说明亮度标记150与测量装置110的拍摄区域之间的尺寸关系的图。图11是用于说明电梯轿厢120的返回运行控制的工序的概念图。图12是以成像部1220的内部结构例为中心示出本发明的实施方式2的测量装置1200的图。图13是以成像部1320的内部结构例为中心示出本发明的实施方式3的测量装置1300的图。图14是以成像部1420的内部结构例为中心示出本发明的实施方式4的测量装置1400的图。图15是表示本发明的实施方式5所涉及的测量系统1500的结构例的图。图16是示出将测量装置110应用于车辆的车辆定位系统1600的结构例的图。图17是示出将测量装置110应用于起重机的起重机定位系统1700的结构例的图。
具体实施方式
12.以下,参照附图,详细描述本发明的实施方式。在以下详细描述的本发明的各实施方式中,说明一种装置、系统和方法,该装置、系统和方法使用构成为包括设置在移动体上的测量装置、以及配置在引导移动体的路径(移动路径)上的亮度标记的测量系统,来识别设置在路径上的基准位置,并且高速且高精度地测量通过基准位置确定的移动体的绝对位置。但是,本发明并不限定于以下说明的各实施方式。
13.各实施方式中示出的测量装置被载置在移动体上部,并且测量与移动体的移动有关的信息(具体地,移动体的绝对位置、移动体的移动速度、移动体的加速度、移动体的振动等)。例如,测量装置响应于在控制部中产生的选通信号,从移动体的光发送部向作为被拍摄体的静止结构物的表面照射(发送)光。然后,测量装置使在静止结构物的表面反弹的光(能够包含正反射光和扩散反射光的光,以下记为“散射光”)经由成像部入射到拍摄部的拍摄面上,在拍摄部中将光信号光电转换为电信号。然后,测量装置基于从转换后得到的电信号生成的图像,在标记识别部中测量与基准位置有关的信息(具体地,作为基准的亮度标记的有无、亮度标记所具有的基准位置、以及用于区分分配给每个亮度标记的基准位置的id等)。此外,测量装置基于从转换后的电信号生成的图像,在图像处理部中测量与移动体的移动有关的信息(具体地,距离移动体的基准位置的移动距离、移动体的移动速度、移动体的振动等)。然后,测量装置基于与基准位置有关的信息和与移动体的移动有关的信息,计算移动体在移动路径上的绝对位置的信息,并将计算出的信息发送到用于进行移动体的运行控制或安全装置的控制的移动体控制部。然后,移动体控制部基于由测量装置计算出的
移动体的绝对位置的信息来进行移动体的运行控制、安全装置的控制。
14.此外,在某些实施方式中,作为设置有本发明的测量装置的移动体,以电梯轿厢为例进行说明,但是能够应用本发明的移动体不限于电梯轿厢。在各个实施方式中示出的技术也能应用于沿着有人工的研磨的划痕的静止结构物(例如,导轨、线路、道路等)移动的移动体(例如,自动门、列车、车辆、起重机等)。另外,在本说明书中,“光”是指电磁波,具体地,除了可见光之外,还可以是微波、太赫兹波、红外线、紫外线、x射线等。同样地,能够应用本发明的测量系统也不限于组装到电梯系统中的测量系统,还可以应用于例如控制自动运行的车辆的定位系统、起重机的定位系统等。
15.此外,在下面的说明中,在不区分同种要素地进行说明的情况下,有时会使用包含分支编号的参照标号中的共通部分(除分支编号外的部分),而在区分同种要素地进行说明的情况下,有时会使用包含分支编号的参照标号。例如,在不特别区分地说明拍摄区域地进行说明的情况下,记载为“亮度标记150”,与此相对,在区分各个测量部(拍摄区域)地进行说明的情况下,记载为“亮度标记150-1”或“亮度标记150-2”。
16.(1)实施方式1(1-1)电梯系统10的结构图1是示出本发明的实施方式1的电梯系统10的结构例的图。
17.如图1所示,电梯系统10构成为包含测量系统100,测量系统100构成为包括载置在电梯轿厢120的上部的测量装置110,该电梯轿厢120在建筑物(省略图示)的井道(移动体的移动路径)内进行升降;以及为了示出井道内的基准位置而设置的多个亮度标记150(单独地,例如亮度标记150-1、150-2)。此外,如图1所示,电梯系统10包含电梯轿厢120、电梯控制部130或导轨140,但是这些构成要素中的至少任何一个可以包含在测量系统100中。
18.测量装置110向电梯控制部130输出为了进行电梯轿厢120的运行控制而有用的信号信息(例如,与电梯轿厢120的位置、移动速度、加速度等有关的信号信息)。电梯控制部130进行电梯轿厢120的运行控制和安全装置的控制等。测量装置110的配置位置不限于电梯轿厢120的上部,也可以配置在上部以外的位置,例如侧面部、下部等。
19.导轨140是配置在井道内的静止结构物的一个示例,沿着移动体的移动方向(图1中的y轴方向)配置在井道内,与电梯轿厢120的引导辊(省略图示)接触,对移动体(电梯轿厢120)的移动进行支承。而且,亮度标记150以规定的间隔配置在导轨140的某一个表面(例如,与引导辊接触的滑动面)的顶部或侧部、通过导轨140的螺栓紧固到壁面的凸缘面、或者位于上述滑动面与凸缘面之间的边界处的颈部等上。
20.例如以贴纸的形式粘贴亮度标记150,但是也可以通过机械的刻印或激光标记对导轨140实施加工来实现,该机械的刻印或激光标记对由于历时老化而引起的污渍或生锈等干扰有较强的抵抗。或者,可以将预先嵌入导轨140中的led那样的指示器用于亮度标记150,led那样的指示器具有高亮度并且能够以高s/n比来进行识别。
21.图2是示出测量系统100的结构例的图。如图2所示,测量装置110构成为包含光发送部210、成像部220、拍摄部230和图像处理部240。在图2中,用带箭头的虚线示出光路,用带箭头的实线示出电信号的路径。
22.光发送部210包括光源(省略图示),并且被配置成向作为被拍摄体的导轨140和导轨140所具备的亮度标记150照射光。既可以将led(light emitting diode:发光二极管)或
卤素灯那样的时间上及空间上不相干的光源用于光发送部210的光源,也可以将激光光源那样的时间上及空间上相干的光源用于光发送部210的光源。
23.成像部220构成为在拍摄部230的拍摄面上使散射光成像的光学系统,该散射光通过由导轨140的表面或亮度标记150对从光发送部210朝向导轨140的表面或导轨140所具备的亮度标记150照射的光即出射光线(出射光)进行散射而得到。
24.拍摄部230将来自成像部220的光信号(表示导轨140的表面或亮度标记150的表面上的散射亮度分布的光信号),即将成像在包含多个像素(pixel)的拍摄面上的光信号转换为与像素的亮度相对应的电信号,并且将转换后得到的电信号作为表示暗视野图像的图像信号发送到图像处理部240。另外,在本实施方式中,从拍摄部230发送到图像处理部240的图像信号不限于表示暗视野图像,也可以表示例如明视野图像等。例如可以将ccd(charge coupled device:电荷耦合器件)图像传感器、cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)图像传感器等用于拍摄部230。另外,拍摄部230可以是二维区域传感器,也可以是在轿厢120的升降方向上具有空间分解功能的一维线传感器。
25.另外,测量系统100也可以在来自光发送部210的出射光及其散射光的路径中,在成像部220以外设置带通滤光器等波长选择式滤光器,除去所希望的波长以外的外部光。另外,出于保护测量装置110的目的,测量系统100中可以在上述入射光及散射光的路径中设置窗材料等,使得沙尘、灰尘等不进入测量装置110。
26.图像处理部240对从拍摄部230接收到的图像信号(将成像在拍摄面上的光信号转换后得获得的电信号)执行规定的图像处理,基于通过该图像处理生成的拍摄图像来计算与电梯轿厢120的移动有关的信息(轿厢移动关联信息)和与亮度标记150所具有的基准位置有关的信息(基准位置关联信息),并将这些信息发送到电梯控制部130。图像处理部240可以由cpu(central processing unit,中央处理部)、gpu(graphics processing unit,图形处理部)或者微控制器这样的信息处理存储介质构成,也可以由fpga(field-programmable gate array,现场可编程门阵列)这样的逻辑电路元件等构成。
27.(1-2)图像处理部240的结构以及图像处理部240的测量处理下面,详细说明图像处理部240的内部结构和由图像处理部240实施的处理。
28.图3是示出图像处理部240的内部结构例的图。如图3所示,图像处理部240构成为包含控制部310、移动量计算部320、亮度标记识别部330和通信部340。
29.控制部310生成多个选通信号(选通脉冲信号),将所生成的多个选通信号中的一个选通信号发送到光发送部210,并将另一个选通信号发送到拍摄部230。发送到光发送部210的选通信号用作定时信号,该定时信号规定光发送部210中的光源的驱动时间。发送到拍摄部230的选通信号用作定时信号,该定时信号用于规定拍摄部230中的曝光时间。然后,控制部310对来自拍摄部230的电信号实施规定的图像处理,并将图像处理后的图像发送到移动量计算部320和亮度标记识别部330。另外,控制部310的图像处理具体地例如是用于将来自拍摄部230的电信号(例如,表示暗视野图像的图像信号)空间分解成与导轨140的表面上的散射亮度分布相对应的图像的处理。
30.移动量计算部320基于从控制部310接收到的图像处理的结果,计算与电梯轿厢120的移动有关的信息(轿厢移动关联信息),并将计算出的信号信息发送到通信部340。具
体地,轿厢移动关联信息包含例如表示轿厢120的位置、移动速度等的信息。
31.亮度标记识别部330对从控制部310接收到的经过图像处理后的图像进行用于识别亮度标记150的图像识别处理,计算与亮度标记150所具有的基准位置有关的信息(基准位置关联信息),并将计算出的信号信息发送到通信部340。具体地,基准位置关联信息例如包含表示作为基准的亮度标记150的有无、用于识别亮度标记150所具有的基准位置(分配给每个亮度标记150的基准位置)的id(后面将作为“id图案”来详细阐述)等的信息。
32.通信部340根据电梯控制部130可接收的通信协议(例如,can(控制器区域网络)通信等的协议),将从移动量计算部320接收到的轿厢移动关联信息和从亮度标记识别部330接收到的基准位置关联信息进行转换,并将转换后的信号信息输出到电梯控制部130。
33.图4是示出图像处理部240的测量处理的处理步骤例的流程图。
34.根据图4,图像处理部240基于由控制部310生成的选通信号开始测定,并且控制部310针对每帧i获取通过电信号从拍摄部230发送的图像i(i)(步骤s101)。帧i优选为后述的帧周期δt的整数倍的时间。此外,如上所述,图像i(i)例如是暗视野图像。然后,在步骤s101中,控制部310将获取到的图像i(i)存储在控制部310内的存储元件(存储器)中。存储图像i(i)的存储元件可以使用图像处理部240所具有的寄存器等易失性存储器,也可以使用配置在外部的非易失性存储器。
35.在步骤s101的处理之后,并行执行步骤s102~s104的处理和步骤s105的处理。另外,如后所述,在步骤s104中,利用步骤s105的处理结果。
36.在步骤s102~s104中,移动量计算部320计算例如轿厢120的位置(轿厢120从亮度标记150的基准位置开始的总移动量)和轿厢120的移动速度v作为轿厢移动关联信息。以下详细说明。
37.首先,移动量计算部320在步骤s101中从存储元件读取存储在存储元件中的第i帧的图像i(i),并且从存储元件读取在第i帧之前k帧前(k是1以上的整数)存储在存储元件中的第i-k帧的图像i(i-k),并且基于图像i(i)与图像i(i-k)之间的差分来计算轿厢120从第i-k帧到第i帧的移动量δy(工序s102)。
38.关于步骤s102中的轿厢120的移动量δy的计算,在后述的图5中,通过示出拍摄图像的示例,来补充更具体的图像。
39.另外,在步骤s102中,取与最新的图像i(i)的差分的图像i(i-k)的选择方法可以选择i帧之前的图像(k=1),也可以选择多帧之前的图像(k=2以上的整数)。此外,在轿厢120的移动量δy的计算方法中,例如,计算图像i(i)与图像i(i-k)之间的相似度的指标即互相关函数,并且将该互相关函数的峰值坐标位置的y分量(与轿厢120的升降方向相同的方向上的分量)推测为轿厢120的移动量δy。另外,根据峰值坐标位置的y分量推测移动量δy的方法不限于特定方法。例如,可以根据最大位置的峰值坐标进行推测,也可以通过使用最大位置附近的几个点进行最小二乘拟合来进行推测等。
40.接着,移动量计算部320计算从图像i(i-k)到图像i(i)的经过时间k
×
δt,并通过取移动量δy与时间k
×
δt之比来计算轿厢120的移动速度v(移动速度v=δy/(k
×
δt))(步骤s103)。
41.此外,移动量计算部320将轿厢120的移动量δy依次累计相加到亮度标记150的基准位置,从而计算轿厢120从上述基准位置开始的总移动量,所述亮度标记150的基准位置
在步骤s105中被亮度标记识别部330识别为移动量计算的基准(步骤s104)。
42.另一方面,在步骤s105中,亮度标记识别部330将包含在第i帧的图像i(i)中的亮度标记150作为移动量计算的基准,来计算基准位置关联信息。
43.更具体地,亮度标记识别部330从存储元件读取第i帧的图像i(i),并且通过对图像i(i)执行图像识别处理来判断图像i(i)中有无亮度标记150。当亮度标记150存在于图像i(i)中时,亮度标记识别部330将该亮度标记150作为移动量计算的新基准来重新计算基准位置关联信息。具体地,亮度标记识别部330计算新用作移动量计算的基准的上述亮度标记150所具有的基准位置、以及分配给上述亮度标记150的id(图8的id图案820)等。另一方面,当在图像i(i)中不存在亮度标记150时,亮度标记识别部330不更新移动量计算的基准,并且继续使用通过最近的测量处理计算出的基准位置关联信息。
44.通过以这种方式进行步骤s105的处理,亮度标记识别部330能将包含在根据轿厢120的移动而变化的图像i(i)中的最新的亮度标记150作为移动量计算的基准来计算基准位置关联信息。若参照图1具体说明,则例如,当轿厢120(测量装置110)沿y轴方向上升时,直到轿厢120超过亮度标记150-1到达亮度标记150-2为止,亮度标记150-1成为移动量计算的基准,计算以亮度标记150-1为基准的基准位置关联信息。此外,在轿厢120(测量装置110)到达亮度标记150-2之后,直到到达下一个亮度标记150为止的期间内,亮度标记150-2成为移动量计算的基准,计算以亮度标记150-2为基准的基准位置关联信息。
45.而且,当步骤s104和步骤s105结束时,控制部310(或通信部340)经由通信部340将在步骤s102~s104中计算出的轿厢移动关联信息和在步骤s105中计算出的基准位置关联信息发送到电梯控制部130(步骤s106)。然后,控制部310将帧编号“i”的值加1(步骤s107)。
46.然后,控制部310确认测量装置110是否处于提供有电源的状态(步骤s108)。只要在步骤s108中提供有电源(步骤s108中的“是”),图像处理部240就重复步骤s101~s107的处理,在供电被切断的情况下(步骤s108中的“否”),测量处理结束。
47.在图4所示的测量处理中,如上所述,将通过亮度标记识别部330的图像识别处理识别出存在的亮度标记150(更严格地说,该亮度标记150所具有的基准位置)设为基准位置,并且累加轿厢120从该基准位置开始的移动量,识别轿厢120的基准位置之间的绝对位置。因此,当轿厢运行时,误差可能在到达下一个亮度标记150的基准位置为止的期间内累加。在这种情况下,当轿厢120在没有基准位置的区间中往复行驶时,误差可能始终连续累加,这在绝对位置的测量精度方面是不希望的。为了消除这种误差的累加,在本实施方式中,将至少一个亮度标记150设置在楼层之间。具体地说,例如,当楼层之间的间隔为4米时,将亮度标记150的设置间隔设为4米以下。
48.如上所述,在电梯系统10中,通过由测量系统100(测量装置110)的图像处理部240执行测量处理,当电梯轿厢120移动时,通过累计相加从作为基准的亮度标记150的基准位置开始的相对的移动量δy,能计算电梯轿厢120的绝对位置。
49.下面,作为与上述的测量处理相关的补充,参照图5说明移动量计算部320的轿厢120的移动量δy的计算图像。另外,作为与测量处理的对象即拍摄图像(图像(i))相关联的补充说明,照图6和图7说明用于防止拍摄图像中的被拍摄体抖动的发生的拍摄部230的曝光时间的设计。
50.图5是用于说明轿厢120移动时的拍摄图像的变化的图。严格地说,如上所述,拍摄
部230读取成像在拍摄面上的光信号并将其转换为电信号,并且图像处理部240(控制部310)对该电信号实施图像处理从而生成拍摄图像。然而,为了简单起见,在以下说明中,有时将通过拍摄部230的拍摄而转换得到的电信号替换为由控制部310进行了图像处理的“拍摄图像”来进行处理。在图5中,举例示出了在拍摄图像中不包含亮度标记150的像的情况,但是拍摄图像也可以包括亮度标记150的像。
51.当从以移动速度v移动的轿厢120拍摄作为被拍摄体的导轨140时,如图5所示,在时间t的时刻和时间(t+k
×
δt)的时刻,在被拍摄体表面(导轨140的表面)上的散射亮度分布510的两个拍摄图像520-1与拍摄图像520-2之间在移动方向(y轴方向)上发生偏差。此外,δt表示帧周期,k是整数值,并且表示以规定的定时为起点(k=0)时的单位帧的经过次数。此时,表示偏差的位移量的δy相当于轿厢120的移动量δy。因此,如在图4的步骤s102~s104中说明的那样,移动量计算部320能通过比较处理不同的帧之间的拍摄图像来计算轿厢120的移动量。
52.图6是示出由控制部310发送到拍摄部230的选通信号的时序图的一个示例的图。
53.如图6所示,图像处理部240的控制部310在每个帧周期δt向拍摄部230发送选通信号610(图6的选通信号610-1、610-2)。拍摄部230响应于从控制部310发送的选通信号610的脉冲,仅在脉冲宽度t的时间内进行曝光(曝光时间t),并且对成像在拍摄面上的光信号进行拍摄。另外,在本实施方式的测量装置110中,也可以与从控制部310向拍摄部230发送选通信号610并行地,从控制部310向光发送部210发送选通信号610,接收到选通信号610的光发送部210仅在曝光时间t的期间点亮光源。通过进行这样的点亮控制,能降低光发送部210的每单位时间的平均输出功率,因而获得抑制驱动所需要的功率和散热的效果。
54.图7是示出曝光时间中的拍摄图像的亮度分布的示例的图。更详细地,图7中示出了当从设置在导轨140上的亮度标记150射出的散射光在一次曝光时间t的期间内在拍摄部230上成像时的拍摄图像的亮度分布的一个示例。
55.在图7中,由于将曝光时间设为t,所以若将曝光时间内的开始时刻设为t,则用t+t来表示曝光时间内的结束时刻。散射光亮度分布710-1是在曝光时间t内的开始时刻t处的在成像面上的散射光的亮度分布,散射光亮度分布710-2是在曝光时间t内的结束时刻t+t处的在成像面上的散射光的亮度分布。比较图7的散射光亮度分布710-1、710-2可知,在从控制部310发送到拍摄部230的选通信号610的期间内,成像在拍摄部230的受光面(拍摄面)上的散射光的亮度分布沿轿厢120的移动方向(y轴方向)移动。结果,在该期间(曝光时间t)内的拍摄图像720中发生朝y轴方向的被拍摄体抖动。
56.上述被拍摄体抖动是由于从曝光时间t内的开始时刻t处的散射光亮度分布710-1到曝光时间t内的结束时刻t+t处的散射光亮度分布710-2,每时每刻连续变化的散射光亮度分布的图像被积累,因而在曝光后的拍摄图像720的移动方向(y轴方向)上发生的“模糊”。即,在拍摄图像720中,与拍摄部230中的曝光时间t成正比,更严格地说,仅轿厢120的移动速度v与曝光时间t的乘积即v
×
t的幅度发生模糊。而且,可以想到如下问题:如果在拍摄图像720中发生了上述被拍摄体抖动(模糊)的状态下进行图像处理,则无法准确地计算轿厢120的移动速度或位置。
57.关于上述问题,为了抑制在轿厢120的移动方向(y轴方向)上发生被拍摄体抖动,需要考虑轿厢120的移动速度v,使曝光时间t足够小(短)。因此,在本实施方式中,将比从拍
摄部230的像素的空间分辨率δ
x
与轿厢120的最大移动速度v
max
之比得到的时间更短(小)的时间设为拍摄部230的曝光时间t。即,通过使用所要求的空间分辨率δ
x
和轿厢120的最大移动速度v
max
来确定曝光时间t,以满足“t《δ
x
/v
max”的关系。具体地,例如,对于要求每分钟300m的最大移动速度的电梯轿厢120,当要求0.5mm的空间分辨率时,可以要求将曝光时间控制在100μs以下。
58.(1-3)亮度标记150的特征下面详细说明本实施方式的测量系统100中可用的亮度标记150的特征。
59.首先,说明亮度标记150的形状。
60.图8是示出亮度标记150的具体示例的图。图8中,作为不同形状的亮度标记150的具体示例,在图8(a)中举例示出了亮度标记151,在图8(b)中举例示出了亮度标记152,在图8(c)中举例示出了亮度标记153。后面描述各个亮度标记151~153的特征,首先说明亮度标记150共同的结构。
61.如图8中的各个视图所示,亮度标记150包括作为绝对位置的基准的基准线810和通过组合明暗亮度的配置来区分基准位置的id图案820。id图案820具有针对每个图案不同的识别信号。此外,在亮度标记150的打印区域的外部设置规定量以上的空白。通过设置有该空白,即使在行驶时的轿厢120上的在与移动方向(y轴方向)正交的垂直方向(x轴方向)上发生摇动,拍摄部230也能够识别亮度标记150,而不会使打印区域偏离到拍摄区域外。即,为了即使在行驶时的轿厢120上发生了x轴方向上的摇动,拍摄部230也将亮度标记150的打印区域可靠地收敛在拍摄区域内,亮度标记150的x轴方向上的边的长度是通过从拍摄区域的x轴方向上的边的长度中减去在轿厢120上能发生的x轴方向上的最大摇动的位移量而得到的长度以下即可。具体地,例如,当将拍摄区域为13mm的测量装置110用于能够在x轴方向上产生5mm的轿厢摇动的轿厢120时,亮度标记150的x轴方向上的边的长度至少要求为8mm以下。
62.本实施方式的亮度标记150(亮度标记151~153)至少在x轴方向上具有特征性的亮度变化。通过利用该亮度变化,即使当轿厢120在y轴方向上高速移动时,测量装置110也能通过将被拍摄体抖动的影响抑制在最小限度来提高检测精度。图9中示出了用于说明该提高检测精度的效果的具体示例。
63.图9是示出亮度标记151的拍摄图像的亮度分布的一个示例的图。与以亮度标记150为对象的图7同样地,在图9中,以图8(a)中所举例示出的亮度标记151为对象,示出了在一次曝光时间t的期间中的拍摄图像的亮度分布的一个示例。如上所述,图7中,当轿厢120高速移动时,在拍摄图像中也可能发生朝移动方向(y轴方向)的被拍摄体抖动。具体而言,图9中,从曝光时间t内的开始时刻t处的散射光亮度分布910-1到曝光时间t内的结束时刻t+t处的散射光亮度分布910-2,每时每刻连续变化的散射光亮度分布的图像被累计,从而在曝光后的拍摄图像920的移动方向(y轴方向)上发生被拍摄体抖动。然而,本实施方式的亮度标记150(例如,亮度标记151)在x轴方向上具有特征性的亮度变化,从而即使在拍摄图像920上的轿厢120的移动方向(y轴方向)上发生被拍摄体抖动,在x轴方向上的亮度变化(边缘的明暗)的图案也不会受影响(参照图9的拍摄图像920)。即,即使在拍摄图像920中的y轴方向上发生了被拍摄体抖动,测量装置110(图像处理部240)也能够检测设置在不会发生被拍摄体抖动的x轴方向上的明暗边缘,因此,能够提高id图案820的检测精度。
64.此外,在本实施方式的亮度标记150(亮度标记151~153)中,id图案820的明暗亮度变化的间隔大于由拍摄部230的像素决定的空间分辨率δx。这是因为,假设在id图案820的明暗亮度变化的间隔比由拍摄部230的像素决定的空间分辨率δ
x
更小(精细)的情况下,拍摄部230无法区分该亮度变化。因此,具体地,例如,当拍摄部230的空间分辨率δ
x
为0.5mm时,id图案820的明暗亮度变化的周期至少大于0.5mm。
65.此外,本实施方式的亮度标记150(亮度标记151~153)中的id图案820的组合具有足以区分同一井道内的基准位置信息的组合数。具体地说,例如,当在总高度为100m的井道内每隔4m设置亮度标记150时,至少设置有25个亮度标记150,因此id图案820需要至少25个图案以上的组合数。
66.此外,在本实施方式的亮度标记150(亮度标记151~153)中,id图案820在移动方向(y轴方向)上不具有周期性。这是因为,即使对于设置了亮度标记150的地方,也实施上述的移动量计算部320的图像处理(移动量计算处理),因此,假设亮度标记150的id图案820在轿厢120的移动方向(y轴方向)上具有周期性的情况下,该周期性被反映在移动量计算处理中,从而计算出的轿厢120的移动量δy(以及总移动量)中出现了与周期相对应的不确定性,可能无法唯一地推测移动量。
67.接下来,说明图8(a)~图8(c)所示的各个亮度标记151~153的特征。这些亮度标记151~153中的任一个具有上述本实施方式的亮度标记150的特征。
68.图8(a)所示的亮度标记151是基准线810与id图案820分离的方式的亮度标记150的一个示例,亮度标记151的id图案820-1由在x轴方向上明暗不同的一维条形码构成。在亮度标记151的情况下,通过检测id图案820-1中的明暗的边缘的位置,能识别用于区分基准位置的id的信息。通过以明暗亮度差为指标检测亮度差为规定的阈值以上的位置,从而能识别该明暗的边缘。同样地,通过检测亮度在y轴方向上急剧变化的坐标(y坐标),也能识别基准线810-1的位置。
69.在本实施方式中,通过利用上述的亮度标记151,能够具有上述本实施方式的亮度标记150的特征,并且能实现结构更简单的亮度标记。
70.图8(b)所示的亮度标记152是将基准线810和id图案820一体化后的亮度标记150的一个示例。亮度标记152的id图案820-2由xy轴方向上的二维的明暗马赛克图案构成,基准线810-2构成为上述明暗马赛克图案的一边。与图8(a)所示的具有明暗的一维的条形码的id图案820-1同样地,像id图案820-2那样的明暗马赛克图案能通过亮度差检测来检测明暗,结果能识别图案的组合。此外,通过检测亮度标记152的矩形的角部位置,能够确定基准线810-2的位置。
71.在本实施方式中,当使用上述的亮度标记152时,与由x轴方向上的一维条形码构成的id图案820-1相比,明暗马赛克型的二维id图案820-2在y轴方向上也能增加图案组合数,因而能增加可写入信息量(例如,层高信息等)。此外,即使对于由于附着在图案上的污渍、图案的部分剥离、外部光引起的像素值的饱和等而导致的部分图案缺陷,也能通过增加图案组合数而容易地获得图案的冗余化构成,因此能实现鲁棒性更高的亮度标记。
72.图8(c)所示的亮度标记153是将基准线810和id图案820一体化后的亮度标记150的一个示例。亮度标记153的id图案820-3由数字、字符构成。在使用亮度标记153的情况下,在测量轿厢120的位置前,例如,图像处理部240通过机器学习等处理来学习各个id图案
820-3,将位置信息分配给通过学习获得的各个id图案820-3的特征点并进行存储,从而在测量轿厢120的位置时,图像处理部240能读取拍摄图像内的id图案820-3所包含的信息(数字或字符)。此外,与基准线810-2同样,基准线810-3构成为亮度标记153的矩形的一边,因而能通过检测亮度标记153的矩形的角部位置来确定该位置。
73.在本实施方式中,当使用上述那样的亮度标记153时,由于人能够容易地从拍摄部230的亮度标记153的拍摄图像中容易地识别id图案820-3中包含的信息,因此还能将亮度标记153用于测量装置110的读取处理的对象以外的用途。例如,能将亮度标记153用于在导轨140的安装、施工或检查时区分导轨140等构件的根数、位置的用途。
74.另外,在本实施方式的测量系统100中,出于提高亮度标记150的识别精度的目的,除了通过人工具备的胶带或刻痕形成的id图案820之外,还能将自然附着在导轨140上的污渍或划痕作为id图案820。在这种情况下,可以将污渍和划痕预先存储在测量装置110或电梯控制部130中,并且可以通过将污渍和划痕与其位置信息相关联来使用。
75.接下来,说明亮度标记150的尺寸。
76.在本实施方式中,亮度标记150的y轴方向上的边的长度l
mark
构成为通过从拍摄部230的拍摄区域的y轴方向上的边的长度l
obs
减去通过将移动体(轿厢120)的最大移动速度v
max
乘以相当于选通信号610的生成周期的帧时间δt(参照图6)而得到的大小后获得的长度以下。即,构成为“l
mark
≤l
obs-v
max
×
δt”的关系成立(可以排除上述不等式的等号)。通过这样的结构,图像处理部240能在两个连续的帧之间的至少任意一个帧中获取完整的亮度标记150的拍摄图像。参照图10来说明亮度标记150的尺寸满足上述关系式的必要性。
77.图10是用于说明亮度标记150与测量装置110的拍摄区域之间的尺寸关系的图。在图10中,示出了这样的示例,其中,在亮度标记150的y轴方向上的边的长度l
mark
不满足上一段所示的关系式“l
mark
≤l
obs-v
max
×
δt”的结构的情况下,无法在两个连续帧之间的至少一个帧中获得完整的亮度标记150的拍摄图像。图像处理部240(控制部310)将从拍摄部230获取拍摄图像的电信号的帧周期设为δt。
78.如图10所示,当经过两个连续帧(第一帧和第二帧)时,测量装置110(拍摄部230)的拍摄区域1010沿轿厢120的移动方向即y轴方向移动。具体地,在图10中,从第一帧开始时刻t处的拍摄区域1010-1移动到第二帧开始时刻t+δt处的拍摄区域1010-2。
79.这里,帧之间的最大移动距离l
max
能用轿厢120的最大移动速度v
max
和帧周期δt的乘积来表示(l
max
=v
max
×
δt)。另外,将拍摄区域1010的移动方向(y轴方向)上的边的长度设为l
obs
时,则连续的两个帧中的拍摄区域1010重叠的区域的y轴方向上的边的长度由“l
obs-l
max”给出。
80.在图10中,举例示出了该重复区域的移动方向(y轴方向)上的边的长度“l
obs-l
max”小于亮度标记150的大小(移动方向上的边的长度)l
mark
的情况,即,“l
mark
》l
obs-v
max
×
δt”的关系成立的情况,此时,如图10所示,在第一帧(时刻t)和第二帧(时刻t+δt)中的任一个中,有时亮度标记150无法完全收敛在拍摄区域1010内,并且仅拍摄到亮度标记150的一部分的图像,结果,图像处理部240从拍摄图像读取亮度标记150失败。
81.以上,以图10的失败例作为反证,在本实施方式中,为了在连续的两帧(时刻t,时刻t+δt)中的至少任一帧的拍摄图像中完全拍摄整个亮度标记150,要求亮度标记的大小l
mark
为“l
obs-v
max
×
δt”以下。若举具体示例,则当通过使用帧周期(δt)为1mm秒且拍摄区
域1010的移动方向(y轴方向)上的边的长度(l
obs
)为13mm的测量装置110来识别亮度标记150时,对于所要求的最大移动速度(v
max
)为每分钟300m的轿厢120,亮度标记150处的移动方向(y轴方向)上的边的长度(l
mark
)要求至少为8mm以下。
82.另外,在本实施方式中,以冗余化为目的,也能排列表示相同id图案820的多个亮度标记150。在这种情况下,对于排列的多个亮度标记150整体的大小,不需要满足上述要求条件“l
mark
≤l
obs-v
max
×
δt”,但是在表示相同id图案820的多个亮度标记150中的至少一个以上的亮度标记150中,要求满足上述要求条件。此外,考虑到设置的容易性,例如在将亮度标记150通过贴纸等粘贴到导轨140上时,仅印刷在该贴纸的内部的亮度标记150满足上述要求条件即可,并且该贴纸的尺寸是比这种亮度标记150足够大的尺寸即可。
83.如上所述,根据本实施方式的测量系统100,当移动体(电梯轿厢120)移动时,搭载在移动体上的测量装置110对具有参照图8~图10等说明的特征的亮度标记150的拍摄图像进行图4所示的测量处理,从而能够高速且高精度地计算移动体在移动路径上的绝对位置信息。即,根据本实施方式的测量系统100,从高速移动的移动体上高度精确地识别设置在井道内的基准位置,并且通过依次地累加移动体从基准位置开始的移动距离,能高速且高精确地测量移动体在井道内的绝对位置。而且,规定的控制部(电梯控制部130)能基于由测量装置110计算出的移动体的绝对位置信息来进行移动体的运行控制、安全装置的控制。
84.(1-4)恢复电力时的移动体的返回运行控制此外,通过使用本实施方式的测量系统100,电梯系统10能实现在发生停电等电源切断后的电力恢复时将移动体移动到规定的返回位置的运行控制(具体地,用于将由于电源切断而停止的电梯轿厢120返回到最近的楼层的返回运行控制)。
85.图11是用于说明电梯轿厢120的返回运行控制的工序的概念图。参照图11,说明在恢复电力时,使由于电源切断而停止在停止位置1111的电梯轿厢120返回到最近的楼层1120的工序。
86.首先,在电梯系统10的安装时,预先准备将设置有亮度标记150的基准位置1112与各楼层的楼层位置1113对应起来的楼层高度表,例如电梯控制部130预先存储该楼层高度表。基准位置1112是各个亮度标记150所具备的基准线810所对应的高度,并且楼层位置1113是当轿厢120停止在对应的楼层(例如,楼层1120)上时的测量装置110的高度。
87.然而,在电梯系统10中,当发生停电等电源切断时,轿厢120等的动作停止,此时,在电源切断之前由测量装置110测量到的轿厢120的位置信息有可能由于电源切断而丢失。因此,在恢复电力时电梯控制部130使轿厢120返回到最近的楼层1120之后重新开始轿厢控制时,若基于在电源切断之前测量到的位置信息使轿厢120返回到最近的楼层1120,则可能发生大的误差。
88.为了解决上述问题,在本实施方式的电梯系统10中,当从电源切断恢复时,电梯控制部130首先使轿厢120从恢复电力时的位置(电源切断的停止位置1111)上升或下降,并且搜索位于最短距离处的亮度标记150。即,图11中,如箭头1131所示,使轿厢120从停止位置1111移动到设置有亮度标记150的基准位置1112。
89.接着,测量装置110从具备基准位置1112的亮度标记150的拍摄图像中读取使用明暗亮度变化的组合的id图案820,获取与基准位置1112(换言之,该亮度标记150的基准线810)相关的位置信息,并将其发送到电梯控制部130。
90.电梯控制部130基于由测量装置110获取到的基准位置1112的位置信息和预先存储的楼层高度表,计算当使轿厢120移动到最近的楼层1120时测量装置110的到楼层位置1113为止的移动距离。因此,电梯控制部130通过使轿厢120移动计算出的移动距离,如图11中的箭头1132所示,能使轿厢120准确地返回到最近的楼层1120。
91.(2)实施方式2图12是以成像部1220的内部结构例为中心示出本发明的实施方式2的测量装置1200的图。实施方式2的测量装置1200的特征在于,具备能够相对于轿厢120的z轴方向(参照图1)的摇动而保持拍摄部230中的成像倍率不变的、具有鲁棒性的成像部1220,但是,关于其他的结构与实施方式1的测量装置110相同,因此省略详细的说明。
92.在图12中,来自导轨140和亮度标记150的散射光的光线由带有箭头的虚线示出(例如,散射光1211~1213)。如图12所示,成像部1220将来自导轨140和亮度标记150的散射光成像到拍摄部230。具体地,成像部1220构成为包括物镜1221(第一透镜)、光圈1222和聚光透镜1223(第二透镜)。物镜1221与导轨140相对地配置,并且对由导轨140散射的散射光进行聚光。光圈1222限制由物镜1221聚光的散射光(散射光1211~1213)的光量。聚光透镜1223配置在光圈1222与拍摄部230之间,对光量被光圈1222限制的散射光进行聚光,并将聚光后的散射光发送到拍摄部230的拍摄面。
93.在本实施方式的成像部1220中,为了消除当作为被拍摄体(检测对象)的导轨140相对于轿厢120沿z轴方向相对地抖动时的倍率的变化的影响,至少将物体侧(导轨140侧)进行远心光学配置,并且为了抑制在拍摄部230中产生的几何像差,通过两块以上透镜在拍摄部230上成像。此外,成像部1220也可以在像侧(拍摄部230侧)具有远心光学配置,在这种情况下,成像部1220起到在安装拍摄部230时的扩大z轴方向的尺寸公差(z轴方向的安装公差)的作用。
94.即,在本实施方式的测量装置1200中,拍摄部230的拍摄面的中心、聚光透镜1223的光轴、光圈1222的中心和物镜1221的光轴被配置成位于同一直线上,并且光圈1222被配置在物镜1221的拍摄部230侧的焦点位置处,并且被配置在聚光透镜1223的物镜1221侧的焦点位置处。
95.此外,如图12所示,在本实施方式中,来自导轨140的散射光透过物镜1221后,经由聚光透镜1223在拍摄部230的拍摄面上成像,上述散射光中的散射光线1211~1213是本成像光学系统的主光线。即,将物镜1221、光圈1222和聚光透镜1223配置成使得散射光线1211~1213通过光圈1222的中心,使得散射光线1211~1213始终与物镜1221的光轴平行地从导轨140的散射面射出,并且始终与聚光透镜1223的光轴平行地入射到拍摄部230。
96.如上所述,根据本实施方式的测量装置1200,即使导轨140的图像在光轴方向(z轴方向)上抖动,也能够使在拍摄部230的拍摄面上成像的图像的倍率不变,并且,即使拍摄部230在z轴方向上的安装位置发生偏移,也能够使在拍摄部230的拍摄面上成像的像的倍率不变。结果,能将安装成像部2220和拍摄部230时的尺寸公差取得较大,并且能构成鲁棒性更高的光学系统。另外,通过将包含物镜2221和聚光透镜2223的两个透镜用于成像部2220,还能期待减小在拍摄部230中产生的成像部2220的几何像差的影响。
97.另外,在本实施方式中,在成像部220中,能使物镜2221的两侧为球面,或者使物镜2221的一侧为球面,另一侧为平面,并且也能构成为玻璃透镜。此外,能使聚光透镜2223的
光线通过的面的形状构成为两侧为球面,或者一侧为球面,另一侧为平面,并且能构成为玻璃透镜。通过这样的构成,在本实施方式的测量装置1200中,能构成更低廉价和具有更高耐久性的成像部2220。
98.(3)实施方式3图13是以成像部1320的内部结构例为中心示出本发明的实施方式3的测量装置1300的图。除了成像部1320的内部结构的一部分不同之外,实施方式3的测量装置1300具有与实施方式2的测量装置1200相同的结构,省略与实施方式2共通的点的详细说明。
99.在图13中,来自导轨140和亮度标记150的散射光的光线由带有箭头的虚线示出(例如,散射光1311~1313)。如图13所示,成像部1320将来自导轨140和亮度标记150的散射光成像到拍摄部230。具体地,与图12所示的实施方式2的成像部1220同样,成像部1320构成为包括物镜1321(第一透镜)、光圈1322和聚光透镜1323(第二透镜),并且作为本实施方式固有的结构,成像部1320包括镜子1324。
100.这里,物镜1321、光圈1322和聚光透镜1323的结构和作用分别与图12所示的物镜1221、光圈1222和聚光透镜1223的结构和作用相同,对物体侧(导轨140侧)进行远心光学配置,并且对像侧(拍摄部230侧)也进行远心光学配置。而且,将镜子1324配置成与导轨140相对,并且将由导轨140散射的散射光向物镜1321正反射。
101.本实施方式的测量装置1300具有上述结构,因此能获得与实施方式2的测量装置1200相同的效果。此外,本实施方式的测量装置1300能通过使用镜子1324来实现更紧凑的结构。即,通过将图13与图12进行比较可知,在测量装置1300中,能将成像部1320、拍摄部230和图像处理部240(未图示)靠近轿厢120的上方进行配置,因而能将测量装置1300载置在轿厢120的上部而不使用特殊的夹具。
102.(4)实施方式4图14是以成像部1420的内部结构例为中心示出本发明的实施方式4的测量装置1400的图。实施方式4的测量装置1400与以暗视野光学配置来配置成像部1220的实施方式2的测量装置1200的不同之处在于,以明视野光学配置来配置成像部1420,但是,除此以外,实施方式4的测量装置1400具有与实施方式2基本相同的结构,省略与实施方式2的共通的点的详细说明。
103.在图14中,来自导轨140和亮度标记150的散射光的光线由带有箭头的虚线示出(例如,散射光1411~1413)。如图14所示,以明视野光学配置来配置成像部1420,将来自光发送部210的照明光的散射光成像到拍摄部230。具体地,成像部1420构成为包括物镜1421(第一透镜)、光圈1422和聚光透镜1423(第二透镜)。物镜1421配置在导轨140上的对于拍摄部230的来自光发送部210的射出光进行正反射的方向上,并且对导轨140中的散射光进行聚光。另外,物镜1421、光圈1422和聚光透镜1423的结构和作用分别与图12所示的物镜1221、光圈1222和聚光透镜1223的结构和作用相同,对物体侧(导轨140侧)进行远心光学配置,并且对像侧(拍摄部230侧)也进行远心光学配置。
104.本实施方式的测量装置1400具有上述结构,因此能获得与实施方式2的测量装置1200相同的效果。此外,在本实施方式的测量设备1400中,通过以明视野光学配置来配置成像部1420,从而能增加入射到拍摄部230的散射光的光量,因此能获得提高由图像处理部240执行的移动量计算处理和亮度标记识别处理的处理精度的效果。
105.(5)实施方式5在本实施方式中,说明具有使实施方式1的测量系统100中的测量装置110的内部结构(光发送部210、成像部220、拍摄部230、图像处理部240)和亮度标记150分别冗余化的结构的测量系统1500。
106.图15是表示本发明的实施方式5所涉及的测量系统1500的结构例的图。如图15所示,测量系统1500构成为包括:具有两个以上测量部1511(分别是测量部1511-a、1511-b)的测量装置1510;配置在测量装置1510与电梯控制部130之间的一个判定部1520;以及粘贴在导轨140的至少两处以上位置上的两个以上亮度标记150(分别是亮度标记150-a、150-b)。另外,虽然图15所示的测量系统1500具有双重化结构和冗余化的结构,但是在本实施方式中,测量系统1500的冗余结构不限于双重化结构,也可以是三重化以上的冗余结构。
107.在测量装置1510中,测量部1511-a、1511-b分别具有与测量装置110相同的内部结构。具体地,测量部1511-a包括光发送部210-a、成像部220-a、拍摄部230-a和图像处理部240-a,并且测量部1511-b包括光发送部210-b、成像部220-b、拍摄部230-b和图像处理部240-b。
108.在如上所述构成的测量装置1510中,测量部1511-a、1511-b分别独立地对粘贴在导轨140的至少两处以上位置上的两个以上亮度标记150中作为各个测量部1511的拍摄对象的亮度标记150(在测量部1511-a的情况下为亮度标记150-a,在测量部1511-b的情况下为亮度标记150-b)进行与测量装置110同样的测量处理。即,光发送部210使射出光照射作为拍摄对象的亮度标记150,成像部220将亮度标记150的散射光成像在拍摄部230的拍摄面上,拍摄部230将耦合到成像面的光信号转换成与像素的亮度相对应的电信号,并且图像处理部240基于通过对电信号实施图像处理而生成的拍摄图像,计算与轿厢120的移动有关的信息(轿厢移动关联信息)和与作为拍摄对象的亮度标记150所具备的基准位置有关的信息(基准位置关联信息)。然而,作为与测量装置110不同的点,各个测量部1511-a、1511-b将各个图像处理部240的计算结果发送到判定部1520,而不是电梯控制部130。
109.然后,判定部1520对分别从测量装置1510的多个测量部1511(详细地,图像处理部240)发送的信号信息(轿厢移动关联信息和基准位置关联信息)进行下一段阐述的比较处理,从而判定与多个测量部1511和亮度标记150相关的异常。
110.作为上述比较处理,判定部1520判定从测量装置1510接收到的至少两条以上信号信息是否相同。当通过该判定来判定为上述两条以上信号信息相同时,判定部1520能判定测量装置1510和亮度标记150正常地进行动作。另一方面,当通过该判定来判定为任何信号信息与其他信号信息不相同时,判定部1520能判定测量装置1510或亮度标记150中的至少任一个存在异常。
111.另外,在本实施方式中,“信号信息相同”可以意味着作为比较对象的信号信息的内容完全一致,但是也可以意味着作为比较对象的信号信息的内容几乎一致(大致一致)。作为完全一致的情况,例如,能例举从图像处理部240-a发送的轿厢120-a的位置与从图像处理部240-b发送的轿厢120-b的位置具有相同的值。另外,作为大致一致的情况,例如能例举从图像处理部240-a发送的轿厢120-a的位置与从图像处理部240-b发送的轿厢120-b的位置之间的差异在预定的范围(例如,允许误差的范围)内。
112.此外,当测量装置1510具有三个以上测量部1511时,在判定部1520的比较处理中,
例如,判定所有成对的信号信息是否相同,当判定为所有成对的信号信息相同时,判定为正常进行动作,当判定为一个以上成对的信号信息不相同时,判定为测量装置1510或亮度标记150中的至少某一个有异常。
113.如上所述进行比较处理的结果,判定为测量装置1510和亮度标记150正常地进行动作的情况下,判定部1520将从测量部1511接收到的信号信息(可以是相同的信号信息中的一条)和表示测量部1511正常地进行动作的判定结果的信号信息(表示正常判定的信息)发送到电梯控制部130。
114.另一方面,当进行比较处理的结果是判定为测量装置1510或亮度标记150中的至少某一个存在异常时,判定部1520向电梯控制部130发送表示测量部1511进行异常动作的判定结果的信号信息(表示异常判定的信息)。此外,除了上述的有无异常的判定之外,判定部1520还可以通过分析与由各个测量部1511获取到的拍摄图像有关的信息、与轿厢120的移动有关的信息(轿厢移动关联信息)、与亮度标记150的基准位置有关的信息(基准位置关联信息)等来识别异常的种类。在分析方法中,由于能适当地使用已知的分析方法,因此省略了详细的说明,但是通过识别异常的种类,具体地,例如,能检测测量装置1510的部件的损坏、由于安装夹具的松动或损坏而引起的异常振动、安装位置的偏差、倾斜、导轨140的腐蚀、污染、异物的粘附、亮度标记150的缺损等。
115.如上所述,根据本实施方式的测量系统1500,通过采用冗余化结构,即使在测量装置1510(测量部1511)或亮度标记150发生故障、污垢或缺损等异常时,也能够安全地检测异常的发生,而不会对电梯轿厢120的运行造成障碍。此外,当检测到异常的发生时,能通过分析从测量装置1510获取到的信息来识别异常的种类,因而能快速地实施适当的恢复作业。
116.(6)其他实施方式在上述各实施方式1~实施方式5中,阐述了将本发明应用于电梯系统中的电梯轿厢120的测量装置的情况,但是本发明不限于此,能广泛地应用于各种其他系统、装置、方法和程序。
117.例如,实施方式1的测量装置110(也可以是其他实施方式的测量装置)不仅能应用于电梯的运行,还能应用于在汽车或列车等高速行驶的车辆中高精度地检测位置或速度的用途。例如,在自动驾驶车辆中,能将测量装置110应用于高速公路上的位置监视/速度监视的目的,或者应用于停车场、加油站或充电站等的高精度的定位的目的。
118.图16是示出将测量装置110应用于车辆的车辆定位系统1600的结构例的图。图16(a)示出了将亮度标记150粘贴在路面1620上的示例,图16(b)示出了将亮度标记150粘贴在高速公路的壁面1630上的示例。
119.如图16所示,在车辆定位系统1600中,测量装置110配置在车辆1610(例如,汽车或列车)的侧部或上部,该车辆1610在路面1620内行驶。测量装置110向车辆控制部(未图示出)输出对进行车辆1610的运行控制有用的信号信息。车辆控制部设置成用于例如使进行自动驾驶的车辆1610安全地进行动作/停止。
120.此外,将表示道路内的基准位置的亮度标记150粘贴在存在于车辆1610的附近的规定的静止结构物(图16(a)中的路面1620和图16(b)中的壁面1630)上。虽然在图16中仅示出一个亮度标记150,但是实际上,可以将多个亮度标记150沿着移动体的移动方向配置在静止结构物上,各个亮度标记150包括相应的基准线810和id图案820。具体地说,例如,亮度
标记150粘贴在需要安全地使车辆1610停止的信号灯跟前的壁面1630上,或者粘贴在停车场和加油站那样需要使车辆1610高精度地定位并停止的路面1620上。例如,当测量装置110的应用对象是列车时,可以将亮度标记150沿着列车行驶的轨道配置。
121.通过如上所述将测量装置110应用于自动驾驶车辆(车辆1610),图16(a)的车辆定位系统1600能利用配置在路面1620上的亮度标记150来高精度地测量车辆1610的位置,因而能有助于使车辆1610高精度地停在规定的目的地(停车场、加油站、充电站等)的控制。同样地,图16(b)的车辆定位系统1600能够利用配置在壁面1630上的亮度标记150高精度地测量车辆1610的位置,因此能够有助于使车辆1610安全地停止在规定的地点(信号灯的跟前等)的控制。
122.例如,实施方式1的测量装置110(可以是其他实施方式的测量装置)也能应用于起重机的运行控制。
123.图17是示出将测量装置110应用于起重机的起重机定位系统1700的结构例的图。在图17所示的起重机定位系统1700中,测量装置110配置在沿着轨道1720在1轴方向上运行的起重机1710的侧部或上部。在图17中,轨道1720相当于配置有亮度标记150的静止结构物,亮度标记150沿着起重机1710的移动方向配置。
124.在起重机定位系统1700中,测量装置110对轨道1720的壁面进行拍摄,测量起重机1710的移动量和速度(与起重机1710的移动有关的信息),并且通过读取粘贴在轨道1720上的亮度标记150来获取与亮度标记150的基准位置有关的信息。起重机1710的起重机控制部(未图示出)基于对进行起重机1710的运行控制有用的上述信息(即,与起重机1710的移动有关的信息和与亮度标记150的基准位置有关的信息),监视起重机1710的动作,并检测位置异常、速度异常。
125.如上所述通过将测量装置110应用于起重机1710,起重机定位系统1700能够在起重机1710的运行控制中提高起重机1710的运行控制的安全性。另外,以上所述的各实施方式是为了容易理解地说明本发明,不限定本发明的范围。另外,关于各实施方式的结构的一部分,也可以进行其他结构的追加、删除、置换等。此外,上述的各结构、功能、处理部、处理单元等也可以将它们的一部分或者全部用例如通过集成电路设计等得到的硬件来实现。另外,上述各结构、功能等也可以解释为由处理器分别实现各功能的程序,通过执行程序以软件的形式来实现。实现各功能的程序、表格、文件等信息能够置于存储器、硬盘、ssd(solid state drive:固态硬盘)等记录装置,或者ic卡、sd卡、dvd等记录介质。
126.此外,在图上示出了考虑到说明上所必须的控制线、信息线,但并不限于是示出了产品上所必须的全部的控制线、信息线。实际上也可以认为几乎所有的结构都是互相连接的。标号说明
127.10 电梯系统100 测量系统110 测量装置120 电梯轿厢(轿厢)130 电梯控制部
140 导轨150(151~153) 亮度标记210 光发送部220 成像部230 拍摄部240 图像处理部310 控制部320 移动量计算部330 亮度标记识别部340 通信部510 散射亮度分布520 拍摄图像610 选通信号710、910 散射光亮度分布720、920 拍摄图像810 基准线820 id图案1010 拍摄区域1111 停止位置1112 基准位置1113 楼层位置1120 最近的楼层1200、1300、1400 测量装置1211~1213、1311~1313、1411~1413散射光线1220、1320、1420 成像部1221、1321、1421 物镜1222、1322、1422 光圈1223、1323、1423 聚光透镜1324 镜子1500 测量系统1510测量装置1511 测量部1520 判定部1600 车辆位置定位系统1610 车辆1620 路面1630壁面1700 起重机定位系统1710 起重机
1720 导轨。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1