一种沙土结构细观试验方法
1.本发明涉及岩土工程室内模型试验方法,具体涉及一种沙土结构细观试验方法,属于岩土工程技术领域,其ipc分类号为e02d33/00。
背景技术:
2.岩土工程中对沙(砂)土等颗粒材料构筑的地基、边坡、挡墙和路堤等结构稳定性进行研究时,通常需要开展室内模型试验,其中三维模型试验是研究这类岩土结构稳定性的主要手段,然而三维模型试验研究的是岩土结构宏观表现形式,无法从细观层面上得知结构内部颗粒的运动规律,而且在大多数情况下操作繁琐,需要一定的劳动力。
3.现有发明专利cn201010182628“土与结构相互作用的接触面剪切试验可视化装置”,仅仅能够实现土与结构剪切带的可视化观测,无法对岩土工程结构例如地基、边坡、挡墙和路堤等进行全方位观测。
4.现有发明专利cn201010142417“基于宏细观力学的岩土力学模型试验系统以及精细化试验方法”需要同时融合岩土力学模型试验、专门的细观图像分析技术、复杂的连续
‑
离散耦合数值模拟等手段才能够实现对试验模型进行精细化分析,内容繁多、操作复杂,且对试验人员要求较高。由于只有少数素质高级人员才能掌握连续
‑
离散耦合数值模拟,因此该方法对试验操作和分析人员要求很高。
技术实现要素:
5.因此,本发明的目的是提供一种操作简单、快捷的沙土结构细观试验方法,本发明的技术解决方案如下:
6.一种沙土结构细观试验方法,采用的试验装置包括反力机构、静力加载机构、模型堆载机构、数据采集系统和拍摄系统;所述反力机构包括反力横梁、两侧滑道、两侧吊绳和横梁高度调整控制器,所述静力加载机构包括电动机、减速机、升降机和加载板,所述模型堆载机构包括沙土颗粒模拟材料、模型架和放置箱,所述数据采集系统包括压力传感器和数据采集仪,所述拍摄系统包括方形照明板和可连续拍照的相机。
7.反力横梁包括横梁和连接板,横梁的两端和连接板的一端设有小螺丝孔,连接板的另一端设有大螺丝孔,横梁通过所述小螺丝孔与连接板连接,连接板通过大螺丝孔固定在模型架上,横梁中设置多个孔洞。
8.所述两侧滑道包括滑道板和滑道块,滑道板固定在模型架上,滑道块与横梁两端采用强力胶水连接,滑道块能够在滑道板中上下移动,从而带动横梁进行上下位置的调节。
9.所述横梁高度调整控制器固定在所述模型架的外侧壁上,所述两侧吊绳通过模型架上部的滑轮缠绕于横梁高度调整控制器上,横梁两端悬吊于两侧吊绳,通过转动横梁高度调整控制器的把手改变横梁的高度。
10.电动机、减速机和升降机通过转轴连接,减速机和升降机通过螺丝ⅰ固定于横梁,减速机用于改变转轴转动速度,进而可以控制升降机升降速度。
11.所述升降机中的升降杆通过横梁中设置的孔洞穿过横梁,升降杆底部带有法兰,法兰与压力传感器通过螺丝ⅱ连接,加载板通过强力胶水与压力传感器连接,升降杆、压力传感器和加载板的纵向轴线在同一位置。
12.所述沙土颗粒模拟材料为圆柱形铝棒,铝棒长度为6
‑
10cm,直径为0.15cm
‑
0.6cm。
13.所述模型架用于堆筑沙土颗粒模拟材料,模型架的底部两侧设有固定架,用于加固模型架,保证模型的整体稳定性,模型架上设有多排螺丝孔,用于固定反力横梁两端的连接板。
14.试验操作步骤如下:
15.1)连接电动机、减速机和升降机,通过减速机调节升降杆的升降速度为1mm/min;
16.2)通过横梁高度调整控制器将横梁调整至距离模型架底部80cm的高度位置,并通过连接板将横梁固定在模型架上;
17.3)选择各个沙土颗粒模拟材料的颗粒级配:选用满足质量分形维数d为1.5的分形级配作为颗粒级配。分形级配的选择方法为:
18.m(d<d
i
)/m
t
=(d
i
/d
max
)3‑
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
19.其中m
t
是指所有直径颗粒的总质量,d
max
是指最大颗粒的直径,d
i
是指其中某个颗粒的直径,m(d<d
i
)是指小于直径颗粒d
i
的颗粒质量和。
20.4)颗粒总质量m
t
采用下方公式进行计算:
21.m
t
=ρbhl
×
(1
‑
n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
22.其中ρ是指所有颗粒的密度,一般情况下,ρ=2700kg/m3,b是地基模型的宽度,h是地基模型的高度,l是颗粒的长度,n是地基模型的孔隙率,一般情况下取0.2;
23.5)根据公式(2)计算得到地基模型中颗粒总质量m
t
=155.5kg;
24.6)选用直径分别为1.5mm、2.0mm、2.5mm、3.0mm、3.5mm、4.0mm、4.5mm、5.0mm、5.5mm、6.0mm的沙土颗粒模拟材料,根据公式(1)计算得到每种直径的颗粒的质量分别为:26.5kg、10.5kg、11.7kg、12.7kg、13.6kg、14.5kg、15.3kg、16.1kg、16.8kg、17.6kg;
25.7)将选好的沙土颗粒模拟材料充分混合,并摆放于放置箱备用;
26.8)根据试验模拟的尺寸,将放置在放置箱中的沙土颗粒模拟材料摆放于模型架上,为保证沙土颗粒模拟材料堆积体前后表面平整,将与模型架等宽度的平板放置于沙土颗粒模拟材料堆积体后侧,在摆放沙土颗粒模拟材料时,通过从前侧推动沙土颗粒模拟材料,使得沙土颗粒模拟材料后侧接触平板,从而保证沙土颗粒模拟材料堆积体前后侧表面的平整度;
27.9)摆放沙土颗粒模拟材料时,在需要监测颗粒压力的位置摆放土压力传感器,测量竖向颗粒压力时,土压力传感器水平摆放,测量水平颗粒压力时,土压力传感器垂直摆放;
28.10)沙土颗粒模拟材料堆放完成后,将压力传感器连带加载板安装在升降杆上,开启静力加载机构,当加载板将要接触到沙土颗粒模拟材料时,关闭静力加载机构;
29.11)将位移传感器放置到沙土颗粒模拟材料堆积体的相应位置,并将位移传感器、压力传感器和土压力传感器中的插线与数据采集仪连接,利用数据采集仪自动记录传感器的数值;
30.12)将方形照明板和相机摆放在模型架前,使相机能够拍摄沙土颗粒模拟材料堆
积体全貌;
31.13)将整个试验模型放置于一长方体不透光幕布棚中;打开方形照明板和相机,进行间隔拍摄,并记录相机开始拍摄的时间;
32.14)启动静力加载机构对沙土颗粒模拟材料堆积体进行加载,同时记录加载初始时间;
33.15)通过静力加载机构持续向沙土颗粒模拟材料堆积体施加竖向荷载,加载过程中相机继续进行间隔拍摄,同时数据采集仪自动记录传感器的数值,直到试验结束;
34.16)关闭静止加载机构、数据采集仪和相机;
35.17)将数据采集仪测得的传感器数据进行处理,分别得到沙土颗粒模拟材料堆积体竖向位移与竖向应力关系曲线,以及沙土颗粒模拟材料堆积体中的颗粒压力分布;
36.18)将间隔拍摄的照片导入piv软件进行处理,得到每个颗粒的位移和速度以及整个沙土颗粒模拟材料堆积体的速度场和位移场,同时对位移场进行分析得到沙土颗粒模拟材料堆积体的破坏形式。
37.进一步地,所述数据采集系统还包括位移传感器和土压力传感器。
38.本发明专利提供的沙土结构细观试验方法,不需要结合数值模拟手段,就可以直观的观测结构内部颗粒变化,能够测试每个时刻沙土结构内部颗粒的位移,进而明确内部颗粒运动规律及沙土结构破坏机理,同时可以得到模型宏观力学表现,为沙土等散粒体地基、边坡、挡墙和路堤等结构计算分析提供参考;结合现有的图像处理技术piv程序,还可以分析结构内部每个颗粒的位移和速度以及结构整体的速度场和位移场和破坏形式,操作简单、快捷,且对操作人员要求很低。
附图说明
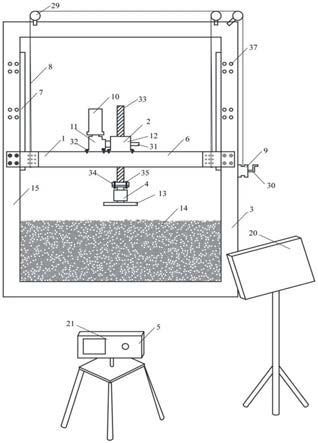
39.图1为本发明采用的试验装置示意图;
40.图2为本发明的反力横梁示意图;
41.图3为本发明的两侧滑道示意图;
42.图4为本发明的升降杆示意图;
43.图5为本发明的横梁高度调整控制器示意图;
44.图6为本发明的沙土颗粒模拟材料示意图;
45.图7为本发明的数据采集系统示意图;
46.图8为本发明的模型架示意图;
47.图9为本发明的放置箱示意图;
48.图10为本发明的幕布棚示意图。
49.图中,1、反力机构;2、静力加载机构;3、数据采集系统;4、模型堆载机构;5、拍摄系统;6、反力横梁;7、两侧滑道;8、两侧吊绳;9、横梁高度调整控制器;10、电动机;11、减速机;12、升降机;13、加载板;14、沙土颗粒模拟材料;15、模型架;16、放置箱;17、压力传感器;18、数据采集仪;19、幕布棚;20、方形照明板;21、相机;22、横梁;23、连接板;24、小螺丝孔;25、大螺丝孔;26、孔洞;27、滑道板;28、滑道块;29、滑轮;30、把手;31、转轴;32、螺丝ⅰ;33、升降杆;34、法兰;35、螺丝ⅱ;36、固定架;37、螺丝孔;38、平板;39、位移传感器;40、土压力传感器。
具体实施方式
50.以下结合附图详述本发明。
51.一种沙土结构细观试验方法,采用的试验装置包括反力机构1、静力加载机构2、模型堆载机构3、数据采集系统4和拍摄系统5;所述反力机构1包括反力横梁6、两侧滑道7、两侧吊绳8和横梁高度调整控制器9,所述静力加载机构2包括电动机10、减速机11、升降机12和加载板13,所述模型堆载机构3包括沙土颗粒模拟材料14、模型架15和放置箱16,所述数据采集系统4包括压力传感器17和数据采集仪18,所述拍摄系统5包括方形照明板20和可连续拍照的相机21。
52.反力横梁6包括横梁22和连接板23,横梁22的两端和连接板23的一端设有小螺丝孔24,连接板23的另一端设有大螺丝孔25,横梁22通过所述小螺丝孔24与连接板23连接,连接板23通过大螺丝孔25固定在模型架15上,横梁22中设置多个孔洞26。
53.所述滑道7包括滑道板27和滑道块28,滑道块28设置在滑道板27中间,滑道板27固定在模型架15上,滑道块28与横梁22两端采用强力胶水连接,滑道块28能够在滑道板27上下移动,从而带动横梁22进行上下位置的调节。
54.所述横梁高度调整控制器9固定在所述模型架15的外侧壁上,所述两侧吊绳8通过模型架15上部的滑轮29缠绕于横梁高度调整控制器9上,横梁22两端悬吊于两侧吊绳8,通过转动横梁高度调整控制器9的把手30可以改变横梁22的高度。
55.电动机10、减速机11和升降机12通过转轴31连接,减速机11和升降机12通过螺丝ⅰ32固定于横梁22,减速机11用于改变转轴31转动速度,进而可以控制升降机12升降速度。
56.所述升降机12中的升降杆33通过横梁22中设置的孔洞26穿过横梁22,升降杆33底部带有法兰34,法兰34与压力传感器17通过螺丝ⅱ35连接,加载板13通过强力胶水与压力传感器17连接,升降杆33、压力传感器17和加载板13纵向轴线在同一位置。
57.(说明:本技术中的螺丝ⅰ和螺丝ⅱ不代表螺丝的型号,只是为了区分两种螺丝的使用位置不同。)
58.所述沙土颗粒模拟材料14为圆柱形铝棒,铝棒长度为6
‑
10cm,直径(即粒径)为0.15cm
‑
0.6cm。铝棒材料比重与土比重接近,因此本技术选用铝棒作为沙土颗粒模拟材料进行研究。放置箱16是开放式,摆放于模型架15一侧,用于试验开始前和试验结束后放置沙土颗粒模拟材料14。
59.所述模型架15用于堆筑沙土颗粒模拟材料14,模型架15的底部两侧设有固定架36,用于加固模型架15,保证模型的整体稳定性,模型架15上设有多排螺丝孔37,用于固定反力横梁6两端的连接板23。
60.试验时,将方形照明板22和可连续拍摄的照相机21放置在模型架15前方,用于试验过程中观测沙土颗粒模拟材料14的运动规律,然后,将整个模型装置放置于一长方体不透光幕布棚19中。
61.下面以地基模型为例,具体说明利用本发明提出的沙土结构细观试验方法的实施方法。
62.地基模型宽为120cm,高为60cm,如图1所示。具体试验步骤如下:
63.1)连接电动机10、减速机11和升降机12,通过减速机11调节升降杆33的升降速度为1mm/min;
64.2)通过横梁高度调整控制器9将横梁22调整至距离模型架15底部80cm的高度位置,并通过连接板23将横梁22固定在模型架15上;
65.3)选择各个沙土颗粒模拟材料的颗粒级配(即选用每种粒径的颗粒的质量),当对颗粒级配没有特殊要求时,选用满足质量分形维数d为1.5的分形级配作为颗粒级配。分形级配的选择方法为:
66.m(d<d
i
)/m
t
=(d
i
/d
max
)3‑
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
67.其中m
t
是指所有直径颗粒的总质量,d
max
是指最大颗粒的直径,d
i
是指其中某个颗粒的直径,m(d<d
i
)是指小于直径颗粒d
i
的颗粒质量和。
68.4)颗粒总质量m
t
采用下方公式进行计算:
69.m
t
=ρbhl
×
(1
‑
n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
70.其中ρ是指所有颗粒的密度,一般情况下,ρ=2700kg/m3,b是地基模型的宽度,h是地基模型的高度,l是颗粒的长度,n是地基模型的孔隙率,一般情况下取0.2;
71.5)根据公式(2)计算得到地基模型中颗粒总质量m
t
=155.5kg;
72.5)根据公式(2)计算得到地基模型中颗粒总质量m
t
=155.5kg;
73.6)选用直径分别为1.5mm、2.0mm、2.5mm、3.0mm、3.5mm、4.0mm、4.5mm、5.0mm、5.5mm、6.0mm的沙土颗粒模拟材料14,根据公式(1)计算得到每种直径的颗粒的质量分别为:26.5kg、10.5kg、11.7kg、12.7kg、13.6kg、14.5kg、15.3kg、16.1kg、16.8kg、17.6kg;
74.7)将选好的沙土颗粒模拟材料14中的颗粒充分混合,并摆放于放置箱16备用;
75.8)根据地基模型尺寸,将放置在放置箱16中的沙土颗粒模拟材料14摆放于模型架15上,为保证沙土颗粒模拟材料14堆积体前后表面平整,将与模型,15等宽度的平板38放置于沙土颗粒模拟材料14堆积体后侧,在摆放沙土颗粒模拟材料14时,通过从前侧推动沙土颗粒模拟材料14,使得沙土颗粒模拟材料14后侧接触平板38,从而保证沙土颗粒模拟材料14堆积体前后侧表面的平整度;
76.9)摆放沙土颗粒模拟材料14时,在需要监测颗粒压力的位置摆放土压力传感器40,土压力传感器40水平摆放时,测量的是竖向颗粒压力,垂直摆放时,测量的是水平颗粒压力;
77.10)地基模型堆放完成后,将压力传感器17连带加载板13安装在升降杆上,开启静力加载机构2,当加载板13将要接触到沙土颗粒模拟材料14时,关闭开关;
78.11)将位移传感器39放置到地基模型的相应位置,并将位移传感器39、压力传感器17和土压力传感器40中的插线与数据采集仪18连接,利用数据采集仪18自动记录传感器的数值;
79.12)将方形照明板20和相机21摆放在模型架15前,使相机21能够拍摄模型全貌;
80.13)将整个试验模型放置于一长方体不透光幕布棚19中;打开方形照明板20和相机21,进行间隔拍摄,并记录相机21开始拍摄的时间;
81.14)启动静力加载机构2对地基模型进行加载,同时记录加载初始时间;
82.15)通过静力加载机构2向沙土颗粒模拟材料施加竖向荷载,加载过程中采用相机21继续进行间隔拍摄,同时数据采集仪18继续自动记录传感器的数值,直到试验结束;
83.16)试验结束后,关闭静止加载机构2、数据采集仪18和相机21;
84.17)将数据采集仪18测得的传感器数据进行处理,分别得到沙土颗粒模拟材料地
基竖向位移与竖向应力关系曲线,以及地基中沙土颗粒模拟材料颗粒压力分布;
85.18)间隔拍摄的照片导入piv软件进行处理,得到每个颗粒的位移和速度以及整个结构的速度场和位移场,同时对位移场进行分析得到地基的破坏形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1