一种反接注入式电子堵转器
1.本发明涉及机电一体化控制技术领域,尤其涉及一种反接注入式电子堵转器。
背景技术:
2.现有电气类电机实验装置中,广泛采用电机机组的(电动机
‑
发电机)工作方式,当进行交、直流电动机堵转状态实验时,需要在电动机保持电功率输入的情况下使机组转速为零,目前主流堵转方案是采用机械卡死装置,如图1所示,即通过两机靠背轮上插入插销强制堵转,其存在三大缺陷:1)需要在停机状态拆卸靠背轮安全罩,人工近距离调整转轴位置,操作时效差,存在安全隐患;2)无法实现电动机从非零转速运转状态下进入堵转状态;3)无法精确设置最大堵转转矩以避免电动机过载发热,对电动机运行电源调压范围有严格约束。
3.另有类似汽车刹车结构的机械抱闸装置,结构复杂,属于机械接触式制动,存在机械磨损和材料老化问题,仍然难以控制电动机过载过热,且安装工艺复杂,不便于已经成型的机组使用。
技术实现要素:
4.本发明的目的在于提供一种反接注入式电子堵转器,旨在克服上述电动机堵转运行劣势,采用无附加机械接触结构的电子调节方式,由负载发电机提供反向制动转矩,实现电动机安全堵转。
5.本发明通过下述技术方案实现:一种反接注入式电子堵转器,所述电子堵转器连接于外接电源和机组,所述机组包括电动机和直流发电机,所述电动机和所述直流发电机传动连接;所述电子堵转器采集所述直流发电机产生第二电流过程中的电流信号和转速信号,并根据所述电流信号和所述转速信号调节所述外接电源输出第一电流的大小和方向,所述第一电流同向叠加于所述第二电流后形成作用于所述直流发电机的电枢电流,所述电枢根据所述电枢电流产生反接制动转矩。
6.优选地,所述反接制动转矩为:;其中,表示反接制动转矩,表示直流发电机的电势常数,表示直流发电机的励磁磁通,表示直流发电机的电枢电流。
7.优选地,所述电子堵转器包括速度传感检测单元、电流传感检测单元、信号调理模块、正负转速逻辑控制模块、asr
‑
acr调节模块以及直流斩波器;所述速度传感检测单元,用于获取所述直流发电机的电枢速度极性和电枢速度大
小;所述电枢速度极性为所述电枢的旋转方向,包括顺时针旋转和逆时针旋转;所述电流传感检测单元,用于获取所述直流发电机的电枢电流大小;所述信号调理模块,用于对所述电枢速度极性、所述电枢速度大小以及所述电枢电流大小进行标准化处理;所述标准化处理包括滤波处理和放大处理/缩小处理;所述正负转速逻辑控制模块,用于根据标准化后的所述电枢速度极性控制所述直流斩波器输出的电流方向;所述asr
‑
acr调节模块,用于根据标准化后的所述电枢速度大小以及所述电枢电流大小获取转矩控制量;所述直流斩波器,用于根据所述转矩控制量和所述电流方向输出所述第一电流。
8.优选地,所述asr
‑
acr调节模块包括速度调节器和电流调节器;所述速度调节器,用于根据零速给定量和所述电枢速度大小获取电流给定量;其中,所述零速给定量为预设值;所述电流调节器,用于根据所述电流给定量和所述电枢电流大小获取所述转矩控制量。
9.优选地,所述电流给定量为:;其中,表示电流给定量,表示零速给定量,n表示电枢速度,k
n
表示速度调节器的pi预置比例参数;表示速度调节器的pi预置积分参数。
10.优选地,所述转矩控制量为:;其中,表示转矩控制量,表示电流给定量,i
a
表示电枢电流,k
i
表示电流调节器的pi预置比例参数;表示电流调节器的pi预置积分参数。
11.优选地,所述直流斩波器包括pwm驱动模块和斩波电路;所述pwm驱动模块,用于根据所述电流方向和所述转矩控制量转换为所述斩波电路中电力电子开关的开关驱动信号和pwm信号占空比大小;所述斩波电路,连接所述外接电源,用于根据所述pwm信号占空比大小对所述直流电源进行斩波,输出所述第一电流。
12.本发明与现有技术相比,具有如下的优点和有益效果:利用电动机机组自身机电特性和电力电子技术控制,实现电动机任意运行速度下的堵转控制,克服了传统依赖附加机械装置制动存在的结构复杂、操作安全性隐患大、不能由动到静堵转、难以精准控制最大堵转转矩等缺陷,实现电动机正反运转一键堵转控制。
附图说明
13.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部
分,并不构成对本发明实施例的限定。在附图中:图1为现有技术中机械堵转器的工作方式示意图;图2为本发明反接注入式电子堵转系统的工作方式示意图;图3为本发明电子堵转器的双反馈电气控制结构示意图;图4为本发明电子堵转器正转制动的堵转示意图;图5为本发明电子堵转器反转制动的堵转示意图;图6为本发明堵转时电动机和发电机机械特性工作点示意图;图7为本发明电子堵转器电气回路原理示意图。
具体实施方式
14.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
实施例
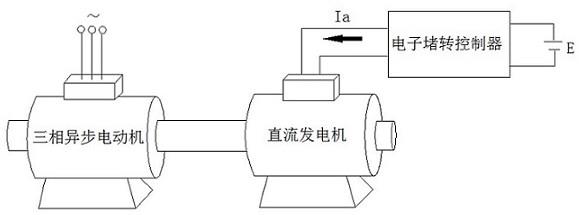
15.一种反接注入式电子堵转器,连接有外接直流电源和机组,用于实现机组的堵转,如图2所示,本实施例中所说的机组包括三相异步电动机和直流发电机,且三相异步电动机和直流发电机传动连接,即:当三相异步电动机转动时,带动直流发电机同步转动。
16.进行堵转实验时,电动机(交流电动机或直流电动机)在电源接入状态下带动直流发电机同步转动,同时向直流发电机的电枢回路注入外接直流电源,并通过电子堵转器控制调节流过电枢的电流大小,以使直流发电机产生与电动机转矩方向相反且大小相等的反接制动转矩。
17.其中,反接制动转矩为:;其中,表示反接制动转矩(量纲:牛顿
·
米),表示直流发电机的电势常数,表示直流发电机的励磁磁通(量纲:韦伯),表示直流发电机的电枢电流(量纲:安培)。
18.由上式可知,直流发电机的电势常数和直流发电机的励磁磁通为固定值,只要改变直流发电机的电枢电流便可以改变反接制动转矩的大小。因此,在本方案中,为了能够自动适应电动机输入电功率的强度变化,始终维持机组的堵转状态,设置了电子堵转器,通过该电子堵转器控制流过直流发电机的电枢电流,进而控制反接制动转矩,实现机组的堵转。
19.本实施例中的电子堵转器如图7所示,包括速度传感检测单元、电流传感检测单元、信号调理模块、正负转速逻辑控制模块、asr
‑
acr调节模块以及直流斩波器;其中,在本实施例中,速度传感检测单元设置为速度传感器,用于获取直流发电机的电枢速度极性和电枢速度大小;电枢速度极性为电枢的旋转方向,包括顺时针旋转和逆时针旋转;电流传感检测单元设置为霍尔电流传感器,用于获取直流发电机的电枢电流大小;信号调理模块,用于对电枢速度极性、电枢速度大小以及电枢电流大小进行标准化处理,本实施例中所说的标准化处理包括滤波处理和放大处理/缩小处理;正负转速逻辑控制模块,用于根据标准化处理后的电枢速度极性控制直流斩波器输出的电流方向;asr
‑
acr调
节模块,用于根据标准化处理后的电枢速度大小以及电枢电流大小获取转矩控制量;包括速度调节器和电流调节器;速度调节器,用于根据零速给定量和电枢速度大小获取电流给定量;其中,零速给定量为预设值;电流调节器,用于根据电流给定量和电枢电流大小获取转矩控制量;直流斩波器,用于根据转矩控制量和电流方向输出第一电流;包括pwm驱动模块和斩波电路;pwm驱动模块,用于根据电流方向和转矩控制量转换为斩波电路中电力电子开关的开关驱动信号和pwm信号占空比大小;斩波电路,连接外接电源,用于根据pwm信号占空比大小对直流电源进行斩波,输出所述第一电流。
20.具体地,如图3和图7所示(图7中,直流斩波电路采用h桥结构,f表示直流发电机电枢,n表示速度传感器,hi表示霍尔电流传感器,vt
1~4
分别表示四只igbt电力电子开关,vd表示续流二极管,r
z
表示负载电阻,u
s
表示直流电源),当电动机带动直流发电机同步转动时,直流发电机产生感应电势,感应电势提供的电流具有制动转矩特性,但由于感应电势较小时,产生的制定转矩无法使机组保持堵转状态,因此,需外接直流电源u
s
通过h桥直流斩波电路向直流发电机电枢供电,并产生与直流发电机自身输出电流方向相同的电流,从而使机组保持堵转状态。为了使得外接电源能够输出与发电机自身输出电流方向相同的电流,速度传感器检测堵转前直流发电机电枢的速度极性和速度大小,信号调理模块对速度极性和速度大小进行标准化处理后将速度大小反馈至速度调节器,速度极性反馈至正负转速逻辑控制;正负转速逻辑控制模块根据速度极性驱动斩波h桥的四个开关vt1、vt2、vt3、vt4的导通或关闭情况,从而使得外接电源能够输出与发电机自身输出电流方向相同的电流;另外,由于反接制动转矩与电枢电流成正比关系,而从堵转前到堵转的过程中,反接制动转矩为一个动态的变化值,为了达到堵转状态,需实时调节流过直流发电机电枢的电流量,因此,在本方案中,通过电流传感器实时检测流过直流发电机电枢的电流大小,信号调理模块对电流大小进行标准化处理后将其反馈至电流调节器;速度调节器根据速度传感器反馈的速度大小和事先给定的零速给定量,计算出电流给定量并传输至电流调节器;电流调节器根据电流给定量和电枢电流计算出制动转矩强度,通过将制动转矩强度转换为pwm信号占空比大小,对直流电源u
s
进行斩波,从而为直流发电机电枢提供不同大小的电枢电流,通过如此往复反馈调节,达到调节稳定状态,实现堵转。
21.其中,电流给定量为:;其中,表示电流给定量,表示零速给定量,n表示电枢速度大小,k
n
表示速度调节器的pi预置比例参数;表示速度调节器的pi预置积分参数。
22.转矩控制量为:;其中,表示转矩控制量,表示电流给定量,i
a
表示电枢电流大小,k
i
表示电
流调节器的pi预置比例参数;表示电流调节器的pi预置积分参数。
23.本申请的电子堵转器采用双闭环反馈控制结构,如图3所示,速度调节器(asr)、电流调节器(acr)串联控制,外环为零速误差控制,内环为制动电流(即制动转矩)控制,控制器均采用pi算法(即比例积分算法),工作时,直流发电机的电枢通过直流斩波器接入电源,通过转速闭环自动控制系统和电力电子pwm(脉宽调制)控制实现发电机电枢电流强度调节,匹配零速制动转矩,使电机机组保持在堵转状态。如图6所示,当电动机输入电功率强度发生变化时(如三相异步电动机定子降压后特性发生变化,其中n
s
为异步电动机同步转速),系统能自动匹配新的发电机负载特性,从原有堵转工作点a切换至新的堵转工作点b(特性交点)。
24.此外,由于电动机包括正转和反转两种方式,而在堵转试验开始前,并不一定知道电动机采用哪种方式转动,而本申请所提及的技术方案在电动机以任意方向进行转动时,均可以实现堵转,参见图4和图5所示,图中,f代表直流发电机电枢转子,us代表外接直流电源,ea代表发电机电枢感应电动势(即发电电势),ia代表发电机电枢电流,s1、s2、s3、s4代表四个电力电子开关、rz代表发电机外接恒定电阻负载。约定电枢正转(逆时针)时,ea为左正右负,反转(顺时针)时,ea为右正左负,电枢电流ia从右到左为正,反之为负。根据发电机工作原理可知,在恒定励磁下其电枢感应电势极性取决于转速方向,发电机感应电势提供的电流具有制动转矩特性,因此外接直流电源us通过斩波注入的自动电流方向应与发电机自身输出电流方向相同。
25.当直流发电机电枢转子被电动机拖动处于正转运行时(如图4所示,直流发电机电枢转子逆时针转动),系统根据速度反馈的极性和大小控制开关s2和开关s3开通(开关s1和开关s4断开),使外接直流电源斩波后输出平均电压极性为左负右正,与发电电势相加,并调节pwm占空比大小,提供由右向左的制动电流ia,直到机组转速为零并保持在稳定堵转状态。
26.当直流发电机电枢转子被电动机拖动处于反转运行时(图5所示,电枢转子顺时针转动),系统控制开关开关s1和开关s4开通(开关s2和开关s3断开),外接直流电源斩波后输出平均电压极性与发电电势极性同时反向,为电枢提供由左向右的制动电流ia,直到机组转速为零并保持在稳定的堵转状态。同时,只需对控制系统速度调节器asr的输出设置限幅值(即i
*a
限幅),确保发电机电磁转矩最大调节值不超过电动机的过载容限,限制电动机最大堵转转矩,就能避免电动机堵转过载过热的问题。
27.综上,本申请利用电动机机组自身机电特性和电力电子技术控制,实现电动机任意运行速度下的堵转控制,克服了传统依赖附加机械装置制动存在的结构复杂、操作安全性隐患大、不能由动到静堵转、难以精准控制最大堵转转矩等缺陷,实现电动机正反运转一键堵转控制功能。
28.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1