一种室内可用的海上球形浮标检定装置
1.本发明属于测试设备技术领域,尤其是一种室内可用的海上球形浮标检定装置。
背景技术:
2.随着我国海洋事业的快速发展,对海洋环境监测仪器设备的需求越来越多,而海洋环境监测仪器设备的产品性能,直接影响到我国海洋环境监测工作的质量和水平。作为一种典型的海洋环境监测仪器,球形浮标广泛应用于沿海水域的波浪测量。浮标内置多种传感器,可以自动、定时、连续地对波高、波周期及波向等要素进行采集,将其发送给接收处理器处理,再将数据传送给计算机。球形浮标的性能好坏,对于海上运输、海岸工程建设、海洋军事和海洋研究都具有十分重要意义。浮标工作一段时间之后,由于多方面原因,测量准确性和可靠性会降低。因此,为了对球形浮标进行周期检修并重新测试、满足新型球形浮标开发的首次检定需要,同时考虑检修、检定的实际环境情况,亟需一种或几种能够在实验室中完成检定工作的新的浮标测试部件或装置。
3.通过检索,尚未发现与本发明专利申请相关的专利公开文献。
技术实现要素:
4.本发明的目的在于克服现有技术中的不足之处,提供一种室内可用的海上球形浮标检定装置。
5.本发明解决其技术问题所采用的技术方案是:
6.一种室内可用的海上球形浮标测试装置,所述测试装置包括浮标卡环、卡头和卡环驱动装置,所述海上球形浮标能够通过卡头可拆卸固装于浮标卡环上,所述浮标卡环与卡环驱动装置相连接设置,所述卡环驱动装置能够带动浮标卡环分别进行垂直摇摆运动、垂直升降运动、水平回转运动或三种运动的叠加运动。
7.进一步地,所述卡环驱动装置能够带动设置于浮标卡环上的海上球形浮标进行模拟海上的波浪运动,垂直摇摆运动、垂直升降运动、水平回转运动的独立或复合工作即能够模拟球形浮标在海上随波浪的运动。
8.进一步地,所述垂直摇摆运动是指浮标卡环连同浮标一起绕水平轴线实现
±
45
°
内的摇摆运动,所述垂直升降运动是指浮标卡环连同浮标一起沿垂直方向的往复直线运动,所述水平回转摆动运动是指浮标卡环连同浮标一起绕垂直轴线实现
±
180
°
范围内的旋转运动,并且能够在任一个指定的位置做
±
15
°
的回转摆动。
9.进一步地,所述垂直摇摆运动、垂直升降运动、水平回转运动的具体技术要求和技术指标为:
10.垂直摇摆运动:浮标卡环按以下运动方程摆动:θ=arctg[(lω/2)cosωt],其中θ为卡环摆角,l为垂直升降运动的幅值,ω为摆动角频率;
[0011]
摆动周期范围在2s
‑
40s内可调,实现的摆动角度为0
°‑±
45
°
;
[0012]
垂直升降运动:浮标卡环按以下运动方程垂直升降:l=l/2+l/2sinωt,其中l为
卡环的瞬时升降高度(最低点为计算零点),l为垂直升降运动的幅值,其最大值为0.8m(即最大设计行程),ω为直线往复运动频率;
[0013]
升降周期范围在2s
‑
40s内可调,实现的升降行程为0m
‑
0.8m;
[0014]
摆动运动周期与升降运动周期相同,升降运动起始点和最高点对应的垂直摇摆运动的摆角为0
°
,上升或下降至l/2时对应的摆角最大;
[0015]
水平回转运动:浮标卡环可在0
°‑±
180
°
范围内绕垂直轴线回转,并且在该范围内可停留在任意位置,继而在此位置上做0
°‑±
15
°
的正弦摆动,其摆动周期在5s
‑
15s内可调。
[0016]
上述三种运动既可独立工作,也可叠加实现复合运动。
[0017]
进一步地,所述卡环驱动装置包括垂直摇摆运动装置、垂直升降运动装置、水平回转运动装置和回转工作台,该回转工作台能够在水平平面上来回旋转;
[0018]
所述垂直摇摆运动装置包括水平轴、摆动轴承和伺服摆动油缸,所述水平轴沿水平方向同轴设置,且沿水平方向对称设置两个,浮标卡环通过两个水平轴与摆动轴承活动安装在一起,水平轴与伺服摆动油缸相连接设置,摆动油缸直接驱动水平轴运动,实现浮标卡环绕水平轴线的摇摆运动;
[0019]
所述垂直升降运动装置包括伺服升降油缸、升降托架机构、垂直摇摆运动装置、升降直线导轨滑块、升降直线导轨,所述升降直线导轨沿竖直方向设置,且沿水平方向对称设置两排升降直线导轨,每排升降直线导轨沿纵向对称设置两个以上,升降直线导轨垂直固装于回转工作台上,所述升降托架机构活动设置于回转工作台上,该升降托架机构通过升降直线导轨滑块与升降直线导轨滑动相连接设置,且能够沿升降直线导轨沿垂直方向做往复直线运动;
[0020]
所述垂直摇摆运动装置的摆动轴承通过升降直线导轨滑块与升降直线导轨滑动相连接设置,且该摆动轴承也与升降托架机构固装在一起,升降托架机构能够带动摆动轴承、浮标卡环、水平轴沿升降直线导轨沿垂直方向做往复直线运动;
[0021]
所述升降托架机构与伺服升降油缸相连接设置,升降伺服油缸驱动升降托架机构运动;
[0022]
所述水平回转运动装置包括回转摆线马达、减速器、小齿轮和大齿圈,所述小齿轮通过减速器与回转摆线马达相连接设置,回转摆线马达通过减速器带动小齿轮转动,大齿圈与小齿轮啮合安装设置,大齿圈在回转摆线马达的带动下做绕垂直轴线的减速转动;大齿圈与回转工作台同轴刚性连接在一起,回转马达能够带动浮标卡环绕垂直轴线的水平回转运动。
[0023]
进一步地,所述升降直线导轨通过安装板垂直安装在回转工作台台面上。
[0024]
进一步地,所述浮标卡环内侧对称设置4个卡头。
[0025]
进一步地,所述测试装置还包括控制系统,该控制系统包括运动控制器、放大器、垂直摇摆编码器、光栅尺、水平回转编码器和零位传感器,该控制系统能够控制比例伺服阀的动作,进一步通过液压系统驱动三个执行元件,同时采集编码器、光栅尺和零位开关的信号,实现三个运动的闭环控制;
[0026]
所述垂直摇摆编码器与水平轴相连接设置,垂直摇摆编码器能够检测水平轴的摇摆角度,并反馈至运动控制器,构成闭环,提高垂直摇摆运动的控制精度;
[0027]
所述光栅尺设置于升降直线导轨上,光栅尺能够检测升降直线导轨的升降位移,
并反馈至运动控制器,构成闭环,提高垂直升降运动的控制精度;
[0028]
所述水平回转编码器与小齿轮相连接设置,水平回转编码器能够检测小齿轮的回转角度,反馈至运动控制器,构成闭环,提高水平回转运动的控制精度。
[0029]
进一步地,所述垂直摇摆运动装置、垂直升降运动装置、水平回转运动装置均设置有零位检测传感器,零位检测传感器用于机械零点位置的检测。
[0030]
本发明取得的优点和积极效果为:
[0031]
1、本测试装置设置了卡环、卡头和卡环驱动装置,卡环驱动装置能够带动(如通过电液比例伺服控制系统控制)浮标分别进行垂直摇摆运动、垂直升降运动、水平回转运动,或通过三种运动的叠加实现复合运动,其复合运动便可模拟浮标在海洋动力(波、风)综合作用下的随波姿态,进而实现对浮标性能的测定。
[0032]
2、本发明装置能够满足浮标模拟海上运动对行程、周期、倾斜角度、方位等参数的测量范围、分辨率和重复性要求,功能和参数设定灵活,其运动规律与海面波浪运动规律的符合性、稳定性满足要求,能够实现海上浮标在实验室内的检测和校准。
[0033]
3、本发明装置为室内检测海上球形浮标提供了极大方便,为研究开发新型浮标、改进浮标检测质量、提高浮标检测效率提供了良好的实验条件,促进了我国海洋环境监测仪器设备的发展。
附图说明
[0034]
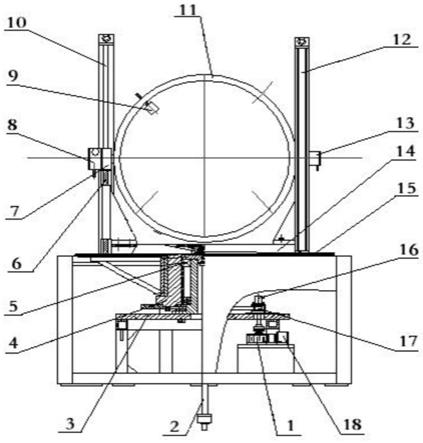
图1为本发明测试装置的一种结构连接示意图;
[0035]
图2为本发明测试装置的液压系统的一种工作原理图;
[0036]
图3为本发明测试装置的一种控制原理图。
具体实施方式
[0037]
下面结合实施例,对本发明进一步说明,下属实施例是叙述性的,不是限定性的,不能以下述实施例来限定本发明的保护范围。
[0038]
本发明中所使用的结构,如无特殊说明,均为常规的结构;本发明中所使用的方法,如无特殊说明,均为本领域的常规方法。
[0039]
一种室内可用的海上球形浮标测试装置,如图1所示,所述测试装置包括浮标卡环11、卡头9和卡环驱动装置,所述海上球形浮标能够通过卡头可拆卸固装于浮标卡环上,所述浮标卡环与卡环驱动装置相连接设置,所述卡环驱动装置能够带动浮标卡环分别进行垂直摇摆运动、垂直升降运动、水平回转运动或三种运动的叠加运动。
[0040]
较优地,所述卡环驱动装置能够带动设置于浮标卡环上的海上球形浮标进行模拟海上的波浪运动,垂直摇摆运动、垂直升降运动、水平回转运动的独立或复合工作即能够模拟球形浮标在海上随波浪的运动。
[0041]
较优地,所述垂直摇摆运动是指浮标卡环连同浮标一起绕水平轴线实现
±
45
°
内的摇摆运动,所述垂直升降运动是指浮标卡环连同浮标一起沿垂直方向的往复直线运动,所述水平回转摆动运动是指浮标卡环连同浮标一起绕垂直轴线实现
±
180
°
范围内的旋转运动,并且能够在任一个指定的位置做
±
15
°
的回转摆动。
[0042]
波高、波周期和波向是描述波浪的基本要素。我国沿海海域波浪的变化规律受季
风和海域影响,冬夏不同、南北不一。根据统计资料,从渤海到南海,从冬季到夏季,波浪的最大周期达到30秒左右,最大波高达到十多米。
[0043]
就前述波浪的波高、波周期和波向等基本要素而言,所设计的浮标测试装置应该能够模拟我国沿海所有已知波浪状况,同时留有一定设计裕度。因此,确定最大实际波高为15米时,依据《波浪模型试验规程》(jtj/t234
‑
2001)中的相似准则,为了保证良好的测试效果,按照不大于1:20的模型比尺,试验最大波高应不小于0.75m。综上,设计指标取波高范围为0.02m
‑
0.8m,波浪周期为2s
‑
40s,波浪方向为0
°‑
360
°
。
[0044]
为了实现实验室环境下的波浪动力环境,并满足上述参数要求,球形浮标测试装置通过分别产生垂直摇摆、垂直升降和水平回转运动三个运动,或通过三种运动的叠加实现复合运动,来模拟实现自然环境下的波浪运动,进而实现对浮标性能的测定。运动规律的确定依据目前已知的海上波浪运动规律(国家制定了相关规程《波浪模型试验规程》(jtj/t234
‑
2001))。
[0045]
较优地,所述垂直摇摆运动、垂直升降运动、水平回转运动的具体技术要求和技术指标为:
[0046]
垂直摇摆运动:浮标卡环按以下运动方程摆动:θ=arctg[(lω/2)cosωt],其中θ为卡环摆角,l为垂直升降运动的幅值,ω为摆动角频率;
[0047]
摆动周期范围在2s
‑
40s内可调,实现的摆动角度为0
°‑±
45
°
;
[0048]
垂直升降运动:浮标卡环按以下运动方程垂直升降:l=l/2+l/2sinωt,其中l为卡环的瞬时升降高度(最低点为计算零点),l为垂直升降运动的幅值,其最大值为0.8m(即最大设计行程),ω为直线往复运动频率;
[0049]
升降周期范围在2s
‑
40s内可调,实现的升降行程为0m
‑
0.8m;
[0050]
摆动运动周期与升降运动周期相同,升降运动起始点和最高点对应的垂直摇摆运动的摆角为0
°
,上升或下降至l/2时对应的摆角最大;
[0051]
水平回转运动:浮标卡环可在0
°‑±
180
°
范围内绕垂直轴线回转,并且在该范围内可停留在任意位置,继而在此位置上做0
°‑±
15
°
的正弦摆动,其摆动周期在5s
‑
15s内可调。
[0052]
上述三种运动既可独立工作,也可叠加实现复合运动。
[0053]
较优地,所述卡环驱动装置包括垂直摇摆运动装置、垂直升降运动装置、水平回转运动装置和回转工作台15,该回转工作台能够在水平平面上来回旋转;
[0054]
所述垂直摇摆运动装置包括水平轴(图中未示出)、摆动轴承7和伺服摆动油缸8,所述水平轴沿水平方向同轴设置,且沿水平方向对称设置两个,浮标卡环通过两个水平轴与摆动轴承活动安装在一起,水平轴与伺服摆动油缸相连接设置,摆动油缸直接驱动水平轴运动,实现浮标卡环绕水平轴线的摇摆运动;
[0055]
所述垂直升降运动装置包括伺服升降油缸2、升降托架机构14、垂直摇摆运动装置、升降直线导轨滑块6、升降直线导轨10,所述升降直线导轨沿竖直方向设置,且沿水平方向对称设置两排升降直线导轨,每排升降直线导轨沿纵向对称设置两个以上,升降直线导轨垂直固装于回转工作台上,所述升降托架机构活动设置于回转工作台上,该升降托架机构通过升降直线导轨滑块与升降直线导轨滑动相连接设置,且能够沿升降直线导轨沿垂直方向做往复直线运动;
[0056]
所述垂直摇摆运动装置的摆动轴承通过升降直线导轨滑块与升降直线导轨滑动
相连接设置,且该摆动轴承也与升降托架机构固装在一起,升降托架机构能够带动摆动轴承、浮标卡环、水平轴沿升降直线导轨沿垂直方向做往复直线运动;
[0057]
所述升降托架机构与伺服升降油缸相连接设置,升降伺服油缸驱动升降托架机构运动;
[0058]
所述水平回转运动装置包括回转摆线马达18、减速器1、小齿轮17和大齿圈4,所述小齿轮通过减速器与回转摆线马达相连接设置,回转摆线马达通过减速器带动小齿轮转动,大齿圈与小齿轮啮合安装设置,大齿圈在回转摆线马达的带动下做绕垂直轴线的减速转动;大齿圈与回转工作台同轴刚性连接在一起,回转马达能够带动浮标卡环绕垂直轴线的水平回转运动。回转摆线马达通过减速器带动小齿轮转动,实现与之啮合的大齿圈绕垂直轴线的减速转动,大齿圈与回转工作台同轴刚性连接在一起,升降直线导轨垂直安装在回转工作台台面上,因此回转马达的旋转运动最终变成了浮标卡环绕垂直轴线的水平回转运动。
[0059]
较优地,所述升降直线导轨通过安装板(图中未标号)垂直安装在回转工作台台面上。
[0060]
较优地,所述浮标卡环内侧对称设置4个卡头。
[0061]
如前所述,球形浮标测试装置模拟波浪的运动由三个运动或独立工作、或叠加而成,这三个运动分别由伺服摆动油缸、伺服升降油缸、水平回转马达等三个液压执行元件驱动,对应着三个相对独立的子系统,即垂直摇摆系统、垂直升降系统和水平回转系统,液压系统工作原理如图2所示(其中,21
‑
空气过滤器,22
‑
液位液温计,23、28
‑
联轴器,24
‑
摇摆泵,25、29
‑
吸油滤油器,26
‑
回转泵27,50
‑
电机,30
‑
升降泵,31、38、49
‑
压油滤油器,32
‑
油箱,33、34、48
‑
电磁溢流阀,35、41、46
‑
30通径比例伺服阀,36、42、45
‑
双向液压锁,37
‑
升降油缸,39、40、47
‑
压力表,43
‑
回转摆线马达,44
‑
垂直摆动油缸伺服摆动油缸,51
‑
冷却器)。系统采用高频响比例伺服阀作为电液伺服位置闭环控制系统中的核心元件,具有高精度、高动态响应、高可靠性等优点。
[0062]
较优地,所述垂直升降系统采用单泵提供能源,水平回转和垂直摇摆系统采用双联泵供油,三个液压子系统互不干涉,按照既定规律,协调完成对球形浮标的检测。
[0063]
较优地,所述测试装置还包括控制系统(如图3所示),该控制系统包括运动控制器、放大器、垂直摇摆编码器、光栅尺、水平回转编码器和零位传感器,该控制系统能够控制比例伺服阀的动作,进一步通过液压系统驱动三个执行元件,同时采集编码器、光栅尺和零位开关的信号,实现三个运动的闭环控制。
[0064]
所述垂直摇摆编码器与水平轴相连接设置,垂直摇摆编码器能够检测水平轴的摇摆角度,并反馈至运动控制器,构成闭环,提高垂直摇摆运动的控制精度;
[0065]
所述光栅尺设置于升降直线导轨上,光栅尺能够检测升降直线导轨的升降位移,并反馈至运动控制器,构成闭环,提高垂直升降运动的控制精度;
[0066]
所述水平回转编码器与小齿轮相连接设置,水平回转编码器能够检测小齿轮的回转角度,反馈至运动控制器,构成闭环,提高水平回转运动的控制精度。
[0067]
较优地,为了更方便地进行检定测试,所述垂直摇摆运动装置、垂直升降运动装置、水平回转运动装置均设置有零位检测传感器,零位检测传感器用于机械零点位置的检测。这三个零位检测传感器的信号均进入运动控制器。
[0068]
本室内可用的海上球形浮标测试装置的相关检测结果:
[0069]
借助高精度罗盘等计量标准器,对装置进行了性能测试和指标测试,结果表明:该装置满足浮标运动对行程、周期、倾斜角度、方位等参数的测量范围、分辨率和重复性要求,其运动规律与海面波浪运动规律的符合性、稳定性满足要求,能够实现海上浮标在实验室内的检测和校准。测试结果见表1。
[0070]
1、运动规律的符合性和稳定性验证
[0071]
(1)测试数据设定:
①
垂直升降幅度
±
150mm、周期15s,垂直摆角
±
15
°
;
②
垂直升降幅度
±
300mm、周期30s,垂直摆角
±
25
°
;
③
垂直升降幅度
±
400mm、周期25s,垂直摆角
±
45
°
。
[0072]
(2)运动姿态:摆动运动周期与升降运动周期相同,升降运动起始点和最高点对应的垂直摇摆运动的摆角为0
°
,上升或下降至l/2时对应的摆角最大。
[0073]
(3)运动持续时间:每种状态连续运行20min。
[0074]
2、运动性能指标测试
[0075]
球形浮标测试装置水平回转工作台能够在0
°
~
‑
180
°
和0
°
~+180
°
转动;所能承受的最大静载荷不小于248kg;卡头夹具之间可测浮标的有效直径范围为0.5m~1.0m。
[0076]
表1球形浮标装置的性能指标测试数据表
[0077][0078]
尽管为说明目的公开了本发明的实施例,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施例所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1