一种磁性金属管道检测装置的制作方法
1.本发明属于管道检测技术领域,涉及一种磁性金属管道检测装置。
背景技术:
2.管道大多数埋地敷设,通过管道内检测可事先发现各种缺陷和损伤,了解各管段的损坏程度,管道检测能够预防和有效减少事故并节约管道维修资金,是保证管道安全的重要措施。我国由于缺乏专业、高质量的管道检测设备,从而导致已检测过的管道只仅占总数小部分,在现有管道检测设备中,暂未发现有设备能够实现进入垂直向下的管道或爬入垂直向上的管道,故此,本发明将提供一种磁性金属管道检测装置以解决上述问题。
技术实现要素:
3.本发明的目的在于针对现有技术存在的问题,提供一种磁性金属管道检测装置,以实现在垂直向上或向下的管道内行走,无需在管道内转向,能适应小直径管道,同时,本发明可产生并分析两种声波,以提高检测准确度。
4.为此,本发明采取以下技术方案:一种磁性金属管道检测装置,包括箱体,所述箱体的顶部设有辅助感应组件、侧部设有电动锤,所述箱体的两侧对称地设有车轮,且二者通过固定轴连接,所述车轮的轮面嵌设有若干感应片,且车轮对应固定轴的侧部依次设有驱动装置、转动盘和固定盘,所述驱动装置通过若干支杆与转动盘连接,所述转动盘和固定盘均套设于固定轴外部,且固定盘通过螺栓与固定轴连接,所述转动盘对应固定盘的侧部设有第一插孔和第二插孔,所述第一插孔内设有阳极触电结构,其通过导线与感应片阳极连接,所述第二插孔内设有阴极触电结构,其通过导线与感应片阴极连接。
5.进一步地,所述辅助感应组件包括电动推杆,所述电动推杆与箱体呈铰接连接,其顶部设有y形连接板、底部设有齿轮,所述连接板的顶部设有辅助轮,所述箱体内设有电动马达,所述齿轮由电动马达驱动。
6.进一步地,所述固定盘对应阳极触电结构的位置处设有半环形阳极导电块、对应阴极触电结构的位置处设有圆环形阴极导电块,所述阳极导电块与阳极触电结构相配合,阴极导电块与阴极触电结构相配合。
7.进一步地,所述驱动装置内设有步进电机。
8.进一步地,所述感应片采用电磁铁。
9.进一步地,所述箱体的顶部设有声波发生器和声波接收器,侧部设有行驶轨迹记录仪。
10.进一步地,所述转动盘的圆心距第一插孔的距离大于其距第二插孔的距离。
11.进一步地,所述阳极触电结构、阴极触电结构均由导电片和弹簧组成。
12.进一步地,所述辅助轮与车轮结构相同。
13.进一步地,所述车轮采用橡胶材质。
14.本发明的有益效果在于:1.本发明通过声波发射器及电动锤产生两种声波,通过处理设备分析不同声波以提高金属管道破损点的检测率;2.本发明中车轮产生的磁力可吸附使其于金属管道内壁,从而实现通入垂直向上或垂直向下的管道,提高越障能力;3.本发明在行驶过程中实现了无需转向即可改变行驶方向,因此本发明同样适用于小直径管道,使用面积更广,实用性强。
附图说明
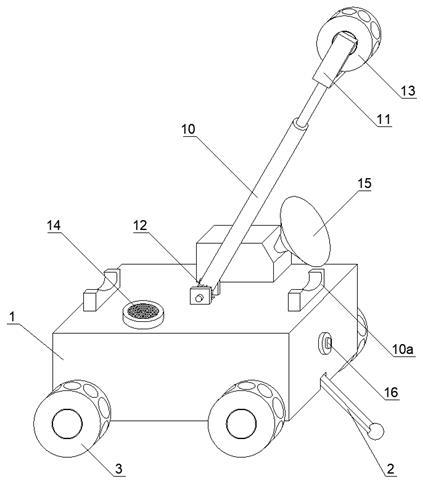
15.图1为本发明的结构示意图;图2为本发明车轮的结构示意图;图3为本发明辅助感应组件与箱体的连接结构示意图;图4为本发明上爬垂直管道的行驶结构示意图;图5为本发明下爬垂直管道的行驶结构示意图。
16.图中,1
‑
箱体,2
‑
电动锤,3
‑
车轮,4
‑
固定轴,5
‑
感应片,6
‑
驱动装置,7
‑
转动盘,7a
‑
第一插孔,7b
‑
第二插孔,7c
‑
阳极触电结构,7d
‑
阴极触电结构,8
‑
固定盘,8a
‑
阳极导电块,8b
‑
阴极导电块,9
‑
支杆,10
‑
电动推杆,10a
–
支座,11
‑
连接板,12
‑
齿轮,12a
‑
电动马达,13
‑
辅助轮,14
‑
声波发生器,15
‑
声波接收器,16
‑
行驶轨迹记录仪。
具体实施方式
17.下面结合附图与实施方法对本发明的技术方案进行相关说明。
18.如图1所示,一种磁性金属管道检测装置,包括箱体1,箱体1的顶部设有辅助感应组件、侧部设有电动锤2,内部设有蓄电池、通信设备和处理器等电子设备,其中,电动锤2用于在行驶过程中不断敲打金属管道,若管道有裂纹则将产生异样声波;箱体1的两侧对称地设有车轮3,且二者通过固定轴4连接,如图2所示,车轮3采用橡胶材质,且轮面嵌设有若干感应片5,进一步地,感应片5采用电磁铁。
19.车轮3对应固定轴4的侧部依次设有驱动装置6、转动盘7和固定盘8,其中,驱动装置6内设有步进电机,其通过若干支杆9与转动盘7连接,驱动装置6用于驱动转动盘7转动;转动盘7和固定盘8均套设于固定轴4外部,转动盘7对应固定盘8的侧部设有第一插孔7a和第二插孔7b,其中,第一插孔7a个数为若干个,第二插孔7b个数为一个,且转动盘7的圆心距第一插孔7a的距离大于其距第二插孔7b的距离,进一步地,第一插孔7a内设有阳极触电结构7c,其通过导线与感应片5阳极连接,第二插孔7b内设有阴极触电结构7d,其通过导线与感应片5阴极连接;具体地,阳极触电结构7c、阴极触电结构7d均由导电片和弹簧组成,弹簧能够持续挤压导电片以保证其与固定盘8的导电块相接触。
20.固定盘8通过螺栓与固定轴4连接,其对应阳极触电结构7c的位置处设有半环形阳极导电块8a、对应阴极触电结构7d的位置处设有圆环形阴极导电块8b,阳极导电块8a、阴极导电块8b分别与箱体1内的供电线相连;由于转动盘7和固定盘8紧密接触,故当转动盘7随车轮3转动时,部分阳极触电结构7c依次与阳极导电块8a接触,而阴极触电结构7d始终与阴极导电块8b接触,此时接触金属管道的感应片5通电,而不接触金属管道的感应片5则断电,
以此保证车轮3可吸附在金属管道上,且在金属管道上保持行驶。
21.如图3所示,辅助感应组件包括电动推杆10,电动推杆10与箱体1呈铰接连接,其顶部设有y形连接板11、底部设有齿轮12,其中,连接板11的顶部设有辅助轮13,且辅助轮13与车轮3结构完全相同,箱体1内设有电动马达12a,齿轮12由电动马达12a驱动;当电动马达12a转动时将带动电动推杆10摆动,且电动马达12a连接传感器,当电动推杆10摆动时受到较大阻力后,电动马达12a会停止运动甚至反向转动;另外,箱体1上还安装支座10a,支座10a用于收纳电动推杆10。
22.另外,箱体1的顶部设有声波发生器14和声波接收器15,侧部设有行驶轨迹记录仪16,其中,声波接收器15用于将管道内壁反射回的声波接收,并通过通信设备发送至处理器进行分析,处理器将根据声波的反射情况确定前方管道的走向,并指导本装置前进,并对与金属管道产生共振后的声波进行分析,从而确定金属管道是否存在损伤;行驶轨迹记录仪16用于记录行驶轨迹,从而生成三维路线图,处理器将检测到的损伤点标记于路线图上,工作人员通过对该路线图的分析处理,便于找到地下管道损伤点的具体地表位置。
23.本发明在使用时,先将其放置于金属管道入口处,令电动推杆10摆动至箱体1后侧,启动声波发射器14、声波接收器15、行驶轨迹记录仪16和电动锤2,并开始沿管道自动前进,期间,声波发射器14将向外发射出可与金属管道产生共振的频率,电动锤2将敲打金属管道,声波接收器15接收上述两种声波后发送至处理器进行分析,即处理器首先利用反射回来的声波确定机器人的前进道路,然后通过分析接收的声波确定金属管道的损伤点,并把损伤点标记在行驶轨迹记录仪16记录的三维路线上。
24.在行驶过程中若管道内较为平坦时,本装置控制器将自动停止向阳极导电块8a、阴极导电块8b供电,仅靠车轮3的转动前进;若需要在较为陡峭的管道内行走时,控制器向阳极导电块8a、阴极导电块8b供电,使得与管道接触的感应片5产生磁力,增大车轮3与金属管道吸附力,避免在前进时出现打滑现象。
25.如图4所示,若需要通过垂直向上的管道时,控制器将给感应片5供电,同时令电动推杆10伸长,并使电动马达12a控制电动推杆10摆动,使得辅助轮13与管道上表面接触,此时四个车轮3和一个辅助轮13靠磁力同时吸附在管道上并不停转动,以此使本装置爬上垂直管道,在爬升过程中,电动马达12a及其上的传感器将保证辅助轮13一直与管道上表面接触;如图5所示,若需要通过垂直向下的管道时,其工作原理与通过垂直向上管道的原理相同。
26.当需要返回出发点时,只需要改变车轮3内驱动装置6内电流方向,使车轮3反向转动,此时即可后退至出发点,待变换行驶方向后,启动电动马达12a控制电动推杆10转动180度,令辅助感应组件在箱体1行驶时处于其后侧方向即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1