一种基于多光谱的路面水冰雪识别装置的制作方法
1.本发明涉及交通道路检测领域,特别涉及对路面上水冰雪识别的的识别装置。
背景技术:
2.因机动车数量的加速增长,我国公路驾驶环境及条件难以改善,公路安全问题日益突出,事实上,大陆地区已经成为全球交通事故频发的重灾区。研究表明,导致交通事故发生的关键客观因素是恶劣天气导致的不良路况,在世界范围内,不良路况都是公路管理部门的心头大患。以冰雪路况为例,结冰及积雪导致车辆轮胎与地面的摩擦系数骤减,因此发生车辆碰撞、刮擦等交通事故的几率大幅攀升。在我国,各省份由于交通气候条件差异,大多数交通事故直接或间接与雨雾霜雪天气有关。由此可见,为了在恶劣天气环境下对相关职能部门及驾驶员提供及时、有效的路面状态信息,能大大提安全驾驶。
3.目前我国针对公路路况的检测手段仍然十分有限,其中覆盖面积较为广泛的检测手段采用的是视频监控设备,也有采用多种路面状态传感器,此路面状态传感器从测量方式上可分为接触式与非接触式两大类,非接触式传感器常安装于公路两旁,具有较大的探测面积,然而在遭遇较强的雪、雾、雨等不良天气或蛛网、枝叶附着时,其光学通路频繁受到遮挡甚至污染,识别正确率将得不到保障。此外,非接触式传感器工作稳定性较低,使用及维护成本较高,不适合大规模应用。现有的接触式传感器一般依靠多频电容测量原理进行结冰判别,但是对干燥和结冰状态的误判时有发生;一般依靠主动式微波雷达测量水膜厚度,但在冰层中会发生复杂的折射、反射现象,严重干扰相位检测。
4.为此本发明人对上述问题进行深入研究,遂由本案产生。
技术实现要素:
5.本发明的目的在于提供一种检测精准,能对路面水冰雪状别和异物状态进行识别的基于多光谱的路面水冰雪识别装置。
6.为了达成上述目的,本发明的解决方案如下所述:一种基于多光谱的路面水冰雪识别装置,包括有填于地面内的外壳及安装于外壳内的发光二极管、光电二极管和分隔件,发光二极管具有红外光二极管、红光二极管和绿光二极管,红外光二极管、红光二极管和绿光二极管的发射方向均朝上设置,光电二极管的接收方向朝上设置,且分隔件处于发光二极管与光电二极管之间,用于发光二极管与光电二极管之间的不透光隔离,外壳的顶面为无色透光面,且外壳的顶面与地面齐平。
7.上述外壳具有下壳体和上顶板,上述下壳体为顶面敞开的中空壳体,上述分隔件为不透光分隔板,上述不透光分隔板处于下壳体内将下壳体的中空腔室分隔出横向排列互不连通的第一腔室和第二腔室,上述上顶板叠放于上述下壳体的顶面上与下壳体紧密配合,上述发光二极管处于第一腔室内,光电二极管处于第二腔室内。
8.上述红外光二极管、红光二极管、绿光二极管与光电二极管横向间隔排列成一排设置,上述发光二极管与光电二极管安装在外壳的内底面上。
9.上述上顶板为有机玻璃板。
10.上述第二腔室内安装有与光电二极管连接的通信模块。
11.采用上述技术方案后,本发明的一种基于多光谱的路面水冰雪识别装置,应用时,发光二极管发出红外光、红光和绿光,光电二极管接收反射光线。当路面状态为干燥状态,即外壳的顶面没有覆盖物质,则光电二极管接收到的为外壳上表面反射回装置的光;当路面状态为水、冰等透光物质,则光电二极管接收到的光包含外壳上表面反射回装置的光以及覆盖物上表面反射回装置的光;当路面状态为雪、沙土等几乎不透光的物质,则发光二极管发射到装置外壳上表面的光几乎全反射回来,被光电二极管接收,利用光电二极管接收到的光来计算反射率,计算出来的反射率再将本识别装置在不同路状态的基准反射率进行比对即可得到当前的路面状态。与现有技术相比,相较于传统识别装置,本识别装置利用三种波长的光能够识别出路面状态和异物状态,并能提高识别路面状态的准确率,同时整个装置结构简易,易于布置、安装及维护,且整个装置的用电量小,能维持长期运行,使用方便。
12.附图说明
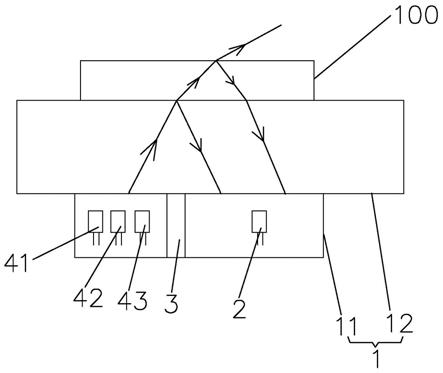
13.图1为本发明的结构示意图。
具体实施方式
14.为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
15.本发明的一种基于多光谱的路面水冰雪识别装置,如图1所示,包括有外壳1及安装于外壳内的发光二极管、光电二极管2和分隔件3,发光二极管具有红外光二极管41、红光二极管42和绿光二极管43,红外光二极管41、红光二极管42和绿光二极管43的发射方向均朝上设置,优佳的是,外壳1具有下壳体11和上顶板12,下壳体11为顶面敞开的中空壳体,下壳体11为一方形壳体,分隔件3为不透光分隔板,分隔件3竖立于下壳体11内,且分隔件3处于发光二极管与光电二极管之间,具体的是,分隔板3处于下壳体内将下壳体的中空腔室分隔出左右横向排列互不连通的第一腔室和第二腔室,第一腔室处于左侧,第二腔室处于右侧,上顶板12叠放于上述下壳体的顶面上与下壳体11紧密粘贴配合,且分隔板3的顶面与上顶板底面相贴粘固,分隔板3的底面与下壳体的内底面相贴粘固配合,上顶板12优佳为有机玻璃板,红外光二极管41、红光二极管42和绿光二极管43横向间隔处于左侧的第一腔室内,光电二极管2处于第二腔室内,光电二极管2的接收方向朝上设置,优佳的是,红外光二极管41、红光二极管42、绿光二极管43和光电二极管2安装在下壳体11的内底面上。
16.本发明的识别装置,应用时,其外壳体内还安装有控制器和显示屏,将外壳1埋于地面上,且外壳1的顶面与地面相齐,红外光二极管41、红光二极管42、绿光二极管43分别启动,分别对应发出红外光、红光和绿光,光电二极管2分别接收到反射光线,接收到的反射光线强度发送给控制器,控制器进行处理判断出相应路面状态,并由显示屏显示出来;当路面状态为干燥状态,即上顶板12的顶面没有覆盖物质,则光电二极管2接收到的光为上顶板12反射回装置的光;当路面状态为水、冰等透光物质时,上顶板12上具有覆盖物100,则光电二
极管2接收到的光有上顶板12反射回装置的光以及覆盖物100上表面反射回装置的光;当路面状态为雪、沙土等几乎不透光的物质,则发光二极管发射到上顶板12上表面的光几乎全反射回来,被光电二极管2接收,利用光电二极管2接收到的光来计算反射率,计算出来的反射率再将本识别装置中控制器内设定的在不同路状态的基准反射率进行比对即可得到当前的路面状态。与现有技术相比,相较于传统识别装置,本识别装置利用三种波长的光能够提高识别路面状态的准确率,同时整个装置结构简易,易于布置、安装及维护,且整个装置的用电量小,能维持长期运行,使用方便
17.采用上述识别装置的基于多光谱的路面水冰雪检测方法,通过如下步骤实现:
18.步骤一、在地面上嵌入上述基于多光谱的路面水冰雪识别装置,且上顶板12的顶面顶面与地面平齐;
19.步骤二、计算反射光强度,将白纸放置在步骤一的外壳顶面上,启动发光二极管和光电二极管,红外光二极管的波长为λ1,红光二极管的波长为λ2,绿光二极管的波长为λ3,由光电二极管分别得到波长为λ1的红外光反射光强度p
红外
,波长为λ2的红光反射光强度p
红
,波长为λ3的绿光反射光强度p
绿
,在特定的波长下给发光二极管输入多个具有线性比例关系的工作电流i
i
(i=1,2,
…
,n),光电二极管在此特定的波长下相应得到多个反射光强度p
i
(i=1,2,
…
,n),则,在波长为λ1下能得到多个红外光反射强度下能得到多个红外光反射强度在波长为λ2下能得到多个红光反射强度下能得到多个红光反射强度在波长为λ3下能得到多个绿光反射强度到多个绿光反射强度
20.步骤三、计算反射光强度系数,利用数理统计方法对步骤二的多个工作电流i
i
与反射光强度p
i
作线性回归,得到p
i
=β
·
i
i
+ε
i
(i=1,2,
…
,n),其中线性回归直线的斜率β记为单位电流下的反射光强度系数,ε
i
为在单位电流下的环境温度产生的噪声,采用最小二乘法计算回归系数β,计算时以不受环境温度等噪声的影响,则β的最小二乘估计值为计算得到的反射光强度系数,计算的公式如下:
[0021][0022]
其中,
[0023]
计算时将代入上述计算公式中得到白纸在波长为λ1下红外光的反射强度系数β
n1
,将代入上述计算公式中得到白纸在波长为λ2下红光的反射强度系数β
n2
,将代入上述计算公式中得到白纸在波长为λ3下绿光的反射强度系数β
n3
;
[0024]
步骤四、计算出射光强度系数,根据白纸在波长λ1的红外光下的反射率为r
n1
,在波长为λ2的红光下的反射率为r
n2
,在波长为λ3的绿光下的反射率为r
n3
,此r
n1
、r
n2
、r
n3
是公知的数值,根据出射光强度系数β
m
等于入射光强度系数β
n
与白纸在波长下的反射率r
n
之比的关系,和步骤三中得出的基于多光谱的路面水冰雪识别装置在白纸下对波长为λ1的反射光强
度系数β
n1
、对波长λ2下红光的反射强度系数β
n2
和对λ3下红光的反射强度系数β
n3
,计算出波长为λ1的出射光强度系数波长为λ2的出射光强度系数波长为λ3的出射光强度系数
[0025]
步骤五、计算任意路面状态下的基准反射率,通过反射率等于反射光强度系数与出射光强度系数的比值关系,而出射光强度系数β
m
等于入射光强度系数β
n
与白纸在波长下的反射率r
n
之比的关系,则路面当前状态和当前波长下的反射率其中β
i
为当前路面状态下检测到的反射光强度系数,则在当前路面状态下波入λ1下的反射率其中β
i1
为当前路面状态下在波长λ1下计算得到的反射光强度系数,在当前路面状态下波长λ2下的反射率其中β
i2
为该天气状态下在波长λ2下计算得到的反射光强度系数,在当前路面状态下对应的波长λ3下的反射率其中β
i3
该当前路面状态下在波长λ3下计算得到的反射光强度系数,以干燥、积水、结冰、积雪、污水和沙土六种路面状态,即在波长λ1下得到干燥路面的反射率r
干燥1
、积水路面的反射率r
积水1
、结冰路面的反射率r
结冰1
、积雪路面的反射率r
积雪1
、污水路面的反射率r
污水1
和沙土路面的反射率r
沙土1
;
[0026]
同理,在波长λ2下得到干燥路面的反射率r
干燥2
、积水路面的反射率r
积水2
、结冰路面的反射率r
结冰2
、积雪路面的反射率r
积雪2
、污水路面的反射率r
污水2
和沙土路面的反射率r
沙土2
;
[0027]
在波长λ3下得到干燥路面的反射率r
干燥3
、积水路面的反射率r
积水3
、结冰路面的反射率r
结冰3
、积雪路面的反射率r
积雪3
、污水路面的反射率r
污水3
和沙土路面的反射率r
沙土3
;
[0028]
步骤六、建立不同路面状态的坐标,形成一个训练集样本;建立每一个路面状态的坐标时将步骤五计算出来的当前路面状态下三种波长的基准反射率和该三个基准反射率中两两反射率的比值分别作为一个特征值,将六个特征值记为该路面状态下的坐标,即分别建立出干燥路面所对应的基准坐标、积水路面所对应的基准坐标、结冰路面所对应的基准坐标、积雪路面所对应的基准坐标、污水路面所对应的基准坐标和沙土路面所对应的基准坐标;
[0029]
具体的是,建立干燥路面所对应的基准坐标采用的是r
干燥1
、r
干燥2
、r
干燥3
、r
干燥1
/r
干燥2
、r
干燥2
/r
干燥3
、、r
干燥3
/r
干燥1
这六个特征值;
[0030]
建立积水路面所对应的基准坐标采用的是r
积水1
、r
积水2
、r
积水3
、r
积水1
/r
积水2
、r
积水2
/r
积水3
、r
积水3
/r
积水1
这六个特征值;
[0031]
建立积水路面所对应的基准坐标采用的是r
结冰1
、r
结冰2
、r
结冰3
、r
结冰1
/r
结冰2
、r
结冰2
/r
结冰3
、r
结冰3
/r
结冰1
这六个特征值;
[0032]
建立积雪路面所对应的基准坐标采用的是r
积雪1
、r
积雪2
、r
积雪3
、r
积雪1
/r
积雪2
、r
积雪2
/r
积雪3
、r
积雪3
/r
积雪1
这六个特征值;
[0033]
建立污水路面所对应的基准坐标采用的是r
污水1
、r
污水2
、r
污水3
、r
污水1
/r
污水2
、r
污水2
/r
污水3
、
r
污水3
/r
污水1
这六个特征值;
[0034]
建立沙土路面所对应的基准坐标采用的是r
沙土1
、r
沙土2
、r
沙土3
、r
沙土1
/r
沙土2
、r
沙土2
/r
沙土3
、r
沙土3
/r
沙土1
这六个特征值;
[0035]
步骤七、采用knn算法对测试路面状态进行分类,分类时,先计算出所测路面状态时当前的反射强度系数β
测
,并利用步骤二计算出来的出射光强度系数,和反射率等于反射光强度系数与出射光强度系数的比值关系,计算出所测路面状态的反射率r
测
,即分别计算出所测路面状态在波长λ1下的反射率r
测1
、在波长λ2下的反射率r
测2
和波长λ3下的反射率r
测3
,计算得到的三组反射率,将此三组反射率值数据和三组反射率中两两反射率之间的比值数据作为一个被测样本的六维坐标,并导入步骤四的训练集样本中,采用欧几里得距离的计算公式计算出被测样本与训练集样本中各坐标之间的距离,通过各距离值排列得出距离值最小的路面状况权重大,从而得出当前路面状态;
[0036]
具体的是,所测路面状态时当前的反射强度系数β
测
的计算方式与步骤三中β
i
的计算方式相同,在此不再累述,利用r
测
等于β
测
与步骤二中计算出来的固定的β
m
的比值即可当时路面状态在覆盖物100下的反射率,即得到反射率r
测1
、反射率r
测2
和反射率r
测3
,
[0037]
在权得比重中,若r1≈r
干燥1
,r2≈r
干燥2
,r3≈r
干燥3
,r1/r2≈r
干燥1
/r
干燥2
,r2/r3≈r
干燥2
/r
干燥3
,r3/r1≈r
干燥3
/r
干燥1
,则判断出路面状态为干燥状态;
[0038]
若r1≈r
积水1
,r2≈r
积水2
,r3≈r
积水3
,r1/r2≈r
积水1
/r
积水2
,r2/r3≈r
积水2
/r
积水3
,r3/r1≈r
积水3
/r
积水1
,则判断出路面状态为积水状态;
[0039]
若r1≈r
结冰1
,r2≈r
结冰2
,r3≈r
结冰3
,r1/r2≈r
结冰1
/r
结冰2
,r2/r3≈r
结冰2
/r
结冰3
,r3/r1≈r
结冰3
/r
结冰1
,则判断出路面状态为结冰状态;
[0040]
若r1≈r
积雪1
,r2≈r
积雪2
,r3≈r
积雪3
,r1/r2≈r
积雪1
/r
积雪2
,r2/r3≈r
积雪2
/r
积雪3
,r3/r1≈r
积雪3
/r
积雪1
,则判断出路面状态为积水状态;
[0041]
若r1≈r
污水1
,r2≈r
污水2
,r3≈r
污水3
,r1/r2≈r
污水1
/r
污水2
,r2/r3≈r
污水2
/r
污水3
,r3/r1≈r
污水3
/r
污水1
,则判断出路面状态为污水状态;
[0042]
若r1≈r
沙土1
,r2≈r
沙土2
,r3≈r
沙土3
,r1/r2≈r
沙土1
/r
沙土2
,r2/r3≈r
沙土2
/r
沙土3
,r3/r1≈r
沙土3
/r
沙土1
,则判断出路面状态为沙土状态。
[0043]
本发明中,可在第二腔室内安装有对光电二极管的数据进行接收和处理的处理器,此处理器的计算方式采用上述计算方式,处理器的信号输出端安装一通信模块,利用此通信模块将数据传送至监控中心,实现数据的远程监控。
[0044]
或者在第二腔室内安装有一通信模块,此光电二极管的输出端与此通信模块电连接,这样光电二极管的数据采用无线通信的方式传输至监控中心处,由监控中心进行计算处理,得到当时路面状态。
[0045]
上述实施例和附图并非限定本发明的方法,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1