一种基于成像声呐封闭空间下鱼群密度探测方法与流程
1.本发明属于图像处理技术领域,涉及一种实现基于成像声呐封闭空间下鱼群密度探测方法。
背景技术:
2.现代社会对渔业资源的质量和产量有更高的要求,海洋牧场就是新形势下兴起的具有更高管理效率和科技含量的现代渔业模式,而渔业资源评估是现代渔业开发过程中的重要环节,鱼群密度统计对于水下养殖具有重要意义。传统的统计方法是通过采样捕捞的方法计算,会对鱼类资源本身造成损害;还有依靠鱼探仪等设备利用回波积分法进行评估,但该方法误差较大。
3.近年来,水下声呐技术被广泛应用到鱼群探测等领域。随着信息技术的飞速发展,声呐数据处理的方法在不断改进。但是目前基于声呐图像对鱼群进行测量的方法都需要大量的人工参与,难以实现声呐鱼群探测的自动化、智能化,成为声呐大规模用于渔业资源评估的制约因素,限制智能渔业养殖的进一步发展。如何利用声呐设备对鱼群资源进行高效、准确的评估成为目前急需解决的问题。
技术实现要素:
4.为解决背景技术中提到的问题,本发明展示了一种基于成像声呐封闭空间下鱼群密度探测方法。
5.为实现上述目的,现提供技术方案如下:
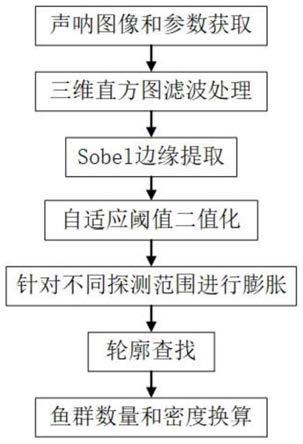
6.一种基于成像声呐封闭空间下鱼群密度探测方法,包括
7.步骤1、通过声呐设备采集封闭空间下鱼群图像;
8.步骤2、根据采集图像时的声呐参数信息由声呐探测体积计算公式得到探测的水体体积;
9.步骤3、对步骤1采集到的鱼群声呐图像进行三维直方图矫正,完成图像中像素值矫正处理;
10.步骤4、根据得到的矫正后图像使用边缘检测,然后通过局部自适应阈值算法得到二值化图像;
11.步骤5、根据不同声呐探测范围对步骤4得到的图像进行膨胀处理,提取轮廓信息,确定鱼群数量;
12.步骤6、根据步骤2得到的水体体积和步骤5得到的鱼群数量,计算得到鱼群的密度。
13.进一步的,所述步骤1中通过声呐设备采集封闭空间下鱼群图像的方法,包括:
14.步骤11、配置声呐传感器相关参数,对水下鱼群进行测量;
15.步骤12、对采集的视频文件进行保存,对获取的视频图像按照固定帧数截取得到处理的图片。
16.进一步的,所述步骤2根据采集图像时的声呐参数信息,由声呐探测体积计算公式计算得到探测水体体积的方法:
17.步骤21、根据声呐探测原理,总结出声呐探测体积计算公式:
[0018][0019]
其中v表示声呐探测的水体体积,l表示声呐的探测距离,θ1表示声呐水平方向开角,θ2表示声呐垂直方向开角;
[0020]
步骤22、根据设置的声呐参数代入声呐探测体积计算公式,得到探测的水体体积。
[0021]
进一步的,所述步骤3对采集到的鱼群声呐图像进行三维直方图矫正,完成图像中像素值矫正处理的方法:
[0022]
步骤31、在步骤1采集的声呐图像进行灰度化处理,分别对图片进行中值滤波和均值滤波处理;
[0023]
步骤32、将步骤31得到的原灰度图和处理后的两张滤波图像构建三维直方图,记图像中一像素点(x,y)处的像素三元组为(p1,p2,p3),当三个像素值中任意一个像素值,与其他两个像素值之差大于剩余两个像素之间的差值时,则对三维直方图的该位置进行矫正:
[0024][0025]
s.t.|p
k
‑
p
i
|>|p
i
‑
p
j
|
[0026]
|p
k
‑
p
j
|>|p
i
‑
p
j
|
[0027]
其中1≤i,j,k≤3且i≠j≠k。
[0028]
进一步的,所述步骤4对矫正后的图像使用边缘检测,然后通过局部自适应阈值算法得到二值化图像的方法:
[0029]
步骤41、对矫正后的图像利用sobel算子进行检测,将图像与横向及纵向的内核进行卷积,分别得到横向及纵向的亮度差分近似值:
[0030][0031][0032]
其中a表示矫正后的图像,g
x
、g
y
分别表示经横向及纵向经边缘检测的图像灰度值;
[0033]
步骤42、利用图像中每一个像素的横向及纵向灰度值来计算该点的灰度,得到鱼群的图像边缘信息;
[0034]
步骤43、基于步骤42)经边缘检测的图像进行局部自适应阈值处理,得到鱼群声呐图像的二值化图像。
[0035]
进一步的,所述步骤5确定鱼群数量的方法:
[0036]
步骤51、基于获得的二值化图像,由声呐设置的探测距离确定膨胀算法系数,根据探测远近确定图像的膨胀程度;
[0037]
步骤52、对膨胀之后的图像进行查找轮廓的操作,得到鱼群声呐图像中鱼的轮廓,并计算得到鱼群数量。
[0038]
本发明的有益效果:
[0039]
1、本发明处理方法提高了鱼群数量探测的准确性,不需要进行采样捕捞,避免了对鱼类资源的损害。
[0040]
2、使用该处理方法,可以不用人工干预基于声呐图像探测鱼群密度的图像处理过程,图像处理所需参数根据声呐测量时的设置自动产生,实现图像处理全过程自动化,提高测量效率。
附图说明
[0041]
图1是本发明的基于成像声呐封闭空间下鱼群密度探测方法示意图;
[0042]
图2是本发明声呐设备采集的原始声呐图像;
[0043]
图3是本发明三维直方图矫正前后效果示意图;
[0044]
图4是本发明识别出的声呐图像鱼群数量示意图。
具体实施方式
[0045]
为使本领域技术人员更加清楚和明确本发明技术方案,下面结合附图对本发明技术方案进行详细描述,但本发明的实施方式不限于此。
[0046]
一种基于成像声呐封闭空间下鱼群密度探测方法,如图1所示,通过声呐设备采集封闭空间下鱼群图像,根据声呐设备的参数信息由声呐探测体积计算公式得到探测的水体体积。采用机器视觉算法检测图像中包含的鱼体轮廓,通过三维直方图矫正对图像中的像素值进行处理,使用边缘检测后完成局部自适应阈值算法,经形态学处理后查找轮廓统计鱼群数量,进而计算出所获取图像的鱼群密度信息。
[0047]
具体包括以下步骤:
[0048]
步骤1、通过声呐设备采集封闭空间下鱼群图像,具体过程为:
[0049]
步骤11、配置声呐传感器相关参数,对水下鱼群进行测量;
[0050]
步骤12、对采集的视频文件进行保存,对拍摄的视频图像按照固定帧数截取得到处理的图片。
[0051]
步骤2、根据采集图像时的声呐参数信息由声呐探测体积计算公式得到探测的水体体积,具体过程为:
[0052]
步骤21、根据声呐探测原理,总结出声呐探测体积计算公式:
[0053][0054]
其中v表示声呐探测的水体体积,l表示声呐的探测距离,θ1表示声呐水平方向开角,θ2表示声呐垂直方向开角;
[0055]
步骤22、根据设置的声呐参数代入声呐探测体积计算公式,得到探测的水体体积。
[0056]
步骤3、对步骤1采集到的鱼群声呐图像如图2所示,进行三维直方图矫正,完成图像中像素值矫正处理,具体过程为:
[0057]
步骤31、在步骤1采集的声呐图像进行灰度化处理,分别对图片进行中值滤波和均
值滤波处理。
[0058]
步骤32、将步骤31得到的原灰度图和处理后的两张滤波图像构建三维直方图。记图像中一像素点(x,y)处的像素三元组为(p1,p2,p3),当三个像素值中任意一个像素值,与其他两个像素值之差大于剩余两个像素之间的差值时,则对三维直方图的该位置进行矫正,如图3所示:
[0059][0060]
s.t.|p
k
‑
p
i
|>|p
i
‑
p
j
|
[0061]
|p
k
‑
p
j
|>|p
i
‑
p
j
|
[0062]
其中1≤i,j,k≤3且i≠j≠k。
[0063]
步骤4、根据得到的矫正后图像使用边缘检测,然后通过局部自适应阈值算法得到二值化图像,具体步骤为:
[0064]
步骤41、对矫正后的图像利用sobel算子进行检测,将图像与横向及纵向的内核进行卷积,分别得到横向及纵向的亮度差分近似值:
[0065][0066][0067]
其中a表示矫正后的图像,g
x
、g
y
分别表示经横向及纵向经边缘检测的图像灰度值。
[0068]
步骤42、利用图像中每一个像素的横向及纵向灰度值来计算该点的灰度,得到鱼群的图像边缘信息。
[0069]
步骤43、基于步骤42经边缘检测的图像进行局部自适应阈值处理,得到鱼群声呐图像的二值化图像。
[0070]
步骤5、根据不同声呐探测范围对步骤4得到的图像进行膨胀处理,提取轮廓信息,确定鱼群数量,如图4所示,具体步骤为:
[0071]
步骤51、基于获得的二值化图像,由声呐设置的探测距离确定膨胀算法系数,根据探测远近确定图像的膨胀程度。
[0072]
步骤52、对膨胀之后的图像进行查找轮廓的操作,得到鱼群声呐图像中鱼的轮廓,并计算得到鱼群数量。
[0073]
步骤6、根据步骤2得到的水体体积和步骤5得到的鱼群数量,计算得到鱼群的密度。
[0074]
以上所述,仅是本发明的最佳实施例而已,并非对本发明的任何形式的限制,任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下利用上述揭示的方法和内容对本发明做出的许多可能的变动和修饰,均属于权利要求书保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1