雷达视野受限场景识别方法、存储介质及车载设备与流程
1.本发明涉及一种雷达视野受限场景识别方法、存储介质及车载设备。
背景技术:
2.毫米波雷达广泛地应用于各个行业,且其大多数的应用场景均为户外,因此容易受到泥沙等的覆盖或遮挡,导致雷达视野(field of view, fov)受限,影响正常使用。因此雷达自检测的重要功能之一即是雷达遮挡自检测功能。例如在汽车领域,装车雷达的电磁波传输路径上,雷达正前方的第二表面(如天线罩、保险杠、车标等)被污泥、冰雪等异物直接覆盖。直接异物覆盖导致雷达被遮挡的情况将使得雷达电磁波无法正常地在环境传播,导致雷达无法正常地感知车身的环境信息,雷达的性能受到严重影响,甚至功能失效。因此,雷达需要具备遮挡自检测功能。
3.通常雷达的遮挡自检测功能依据雷达回波在时域或频域中,环境目标的相关表征来实现雷达有、无异物覆盖的判断,进而实现遮挡检测。然而,在实际行车过程中,易遇到影响遮挡检测正确率的
‘
困难’场景,例如雷达的全视野受限场景(也即全fov受限场景)。全fov受限场景定义为,雷达的全部fov区域内,各个角度的近距离处均被物体包围的场景。图1和图2示出了两种典型的全视野受限场景。其中,包围物体可以为具有电磁波强衰减性能与电磁波强反射性能的物体的组合,也可以为单独的具有电磁波强反射性能的物体。全fov受限场景对雷达检测的影响直接表现为,在该场景下,电磁波传输受到阻碍,无法进行远距离的目标检测。以汽车领域为例,典型的全fov受限场景如,雷达四周被墙体和旁边车辆包围的停车场,拥堵红绿灯等。雷达处于全fov受限场景时,即使其第二表面并非受到异物直接覆盖,但由于电磁波传输同样受阻,一定远距离上的信号表征与雷达第二表面直接被异物覆盖时的表征几乎一致,表现出
‘
伪’遮挡特征,在这种场景下,雷达通过从回波中提取环境目标(如地面、建筑物、树干、栏杆、车辆等反射体)信息实现的常规遮挡检测算法无法区别出是真正的雷达第二表面被直接异物覆盖还是非直接异物覆盖的全fov受限场景,从而可能出现遮挡误报警,影响遮挡检测的算法鲁棒性,引起不良的用户体验。
4.申请公布号为cn112485770a,申请公布日为2021年3月12日的中国发明专利申请公开了一种毫米波雷达全fov受限场景的方法,通过将毫米波雷达回波对应的一维fft谱线作为输入,统计计算得到非全fov受限的常规行车场景下以及全fov受限场景下一维fft谱线变化率边界值,进而确定全fov受限场景识别的判定阈值。然而,该方法计算稍复杂,还有改进的空间。
技术实现要素:
5.本发明的目的在于提供一种有效且易于实现的雷达视野受限场景识别方法。
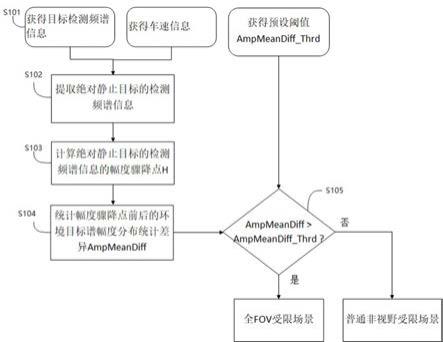
6.一种雷达视野受限场景识别方法,应用于一可移动设备上的雷达,所述雷达视野受限场景识别方法包括对全视野受限场景的识别步骤s10,所述步骤s10包括:s101,基于雷达回波得到目标检测频谱信息;
s102,根据所述移动设备的移动速度及雷达的参数指标提取所述目标检测频谱信息中绝对静止目标的检测频谱信息;s103,计算所述绝对静止目标的检测频谱信息的幅度骤降点h;s104,计算所述幅度骤降点h前、后预设距离段内的幅度分布差异;以及s105,当所述幅度分布差异大于或等于预设阈值时,判断当前雷达所处环境为全视野受限场景,否则判断当前雷达所处环境为普通非视野受限场景。
7.作为一种实施方式,雷达启动后,判断所述雷达是否处于遮挡状态,当判断是时,执行所述步骤s10,并且在步骤s10的结果是当前雷达所处环境为普通非视野受限场景时,输出遮挡报警信号,在步骤s10的结果是当前雷达所处环境为全视野受限场景时,则雷达未被遮挡,完成检测。
8.作为另一种实施方式,雷达启动后,首先执行所述步骤s10,当结果为当前雷达所处环境为普通非视野受限场景时,执行雷达遮挡检测功能,否则取消雷达遮挡检测功能。
9.作为一种实施方式,通过对所述雷达各通道的回波分别进行二维傅里叶变换后,对各个通道的傅里叶变换结果做相干或非相干积累获得所述目标检测频谱信息,再依据所述移动速度以及雷达的速度检测分辨率,计算出环境绝对静止目标在所述目标检测频谱信息中对应的谱信息位置索引,并依据该位置索引从所述目标检测频谱信息中提取出所述绝对静止目标的检测频谱信息。
10.作为一种实施方式,通过寻找所述绝对静止目标的检测频谱信息全距离段上,所有相邻波峰与波谷的幅度差值的最大值,再依据获得该最大值处波峰波谷分别对应的距离值,取二者的中间值为所述幅度骤降点h。
11.作为一种实施方式,在得到所述幅度骤降点h后,统计所述绝对静止目标的检测频谱信息的上前、后预设距离段内的幅度均值,分别记作ampmean_b、ampmean_a,并进一步得到ampmea_b与ampmean_a的差异ampmeandiff作为所述幅度分布差异。
12.作为另一种实施方式,在得到所述幅度骤降点h后,统计所述绝对静止目标的检测频谱信息的上前、后预设距离段内的幅度值的概率密度函数,并进一步得到这两个概率密度函数的差值来作为所述幅度分布差异。
13.作为另一种实施方式,在得到所述幅度骤降点h后,统计所述绝对静止目标的检测频谱信息的上前、后预设距离段内的幅度值的和,分别记作ampsum_b、ampsum_a,并进一步得到ampsum_b与ampsum_a的差异ampsumdiff作为所述幅度分布差异。
14.本发明还提供了一种存储介质,所述存储介质包括指令,所述指令用于实现上述的雷达视野受限场景识别方法。
15.本发明还提供了一种车载设备,所述车载设备包括处理器和如上所述的存储器,所述车载设备通过所述处理器调用所述存储介质的指令,以实现如上所述的雷达视野受限场景识别方法。
16.本发明的雷达视野受限场景识别方法适宜应用于装载在可移动设备上的雷达,特别是毫米波雷达。该方法充分考虑了全视野受限场景可能存在的情况,有效地实现了雷达对自身视野受限场景情况进行自检测,同时,该方法鲁棒性强,对算力要求低,改善了雷达系统自诊断功能的准确性,且满足雷达诊断应用的实时性。
附图说明
17.图1为一种典型的雷达全视野受限场景。
18.图2为另一种典型的雷达全视野受限场景。
19.图3为一实施例中雷达视野受限场景识别方法的流程图。
20.图4为全视野受限场景与普通视野受限场景的绝对静止目标的检测频谱信息分布比对。
21.图5为雷达全视野受限场景检测结果示意图。
22.图6为一个扩展实施例中基于所述雷达视野受限场景识别方法的雷达遮挡检测流程。
23.图7为另一扩展实施例中基于所述雷达视野受限场景识别方法的雷达遮挡检测流程。
具体实施方式
24.下面将结合具体实施例及附图对本发明雷达视野受限场景识别方法、存储介质及车载设备作进一步详细描述。
25.本发明所述雷达视野受限场景识别方法的主要目的是识别出雷达视野受限的情况,是属于全视野(fov)受限场景,还是由于污泥、冰雪等异物直接覆盖其第二表面导致的一般遮挡,从而有效地发出报警信号,改善雷达系统自诊断功能的准确性。
26.该全视野受限场景的识别方法可应用于可移动设备上的雷达,例如车载雷达,特别是毫米波雷达上,例如可以应用在车载后角雷达和车头前视雷达的遮挡检测中,还可以应用在后备箱开门预警上。例如当雷达检测到全fov受限场景,即是雷达(车身)周围近距离存在大面积障碍物(车身环境物体被包围),此时需提醒驾驶员后备箱开启存在碰撞危险。本发明方法的总体思路还可转用在其他超声波雷达、激光雷达等雷达上。
27.其中,全视野受限场景的识别是依据全视野受限场景下电磁波传输路径的特性,在该场景下,电磁波传输的主要表现为,雷达全fov的电磁波在短距离内传输后,受到周围墙体、物体衰减或被车辆反射并产生多径信号,导致雷达电磁波无法传输到更远的距离上,也即是无法探测远距离目标,与此同时,远距离上无杂波进入接收端,最终表现为近距离有较强回波与杂波,而远距离上无目标回波和杂波,几乎仅有系统噪声,在频域上直观地表现为在某个距离点上出现幅度的骤降点。然而,对于非全fov受限场景(普通视野受限场景),无论雷达第二表面是否被异物覆盖,全距离段均同时存在目标、杂波或全是系统噪声的分布,在频域上均无该明显的幅度骤降点出现。也即是全fov受限场景下的电磁波信号表征与常规场景下(即非全fov受限)的信号表征存在差异。
28.依据上述全fov受限场景与常规雷达视野受限场景的电磁波表现差异,本实施例以毫米波雷达为例提供了一种全视野受限场景的识别方法(定义为步骤s10,请参考图3所示),包括以下步骤s101至s105。
29.s101,基于雷达回波得到目标检测频谱(detection spectrum)信息。具体为,通过对所述雷达各通道的回波分别进行二维傅里叶变换后,对各个通道的傅里叶变换结果做非相干积累,以获得所述目标检测频谱信息(该谱信息同时体现了目标的速度和距离值)。所述目标检测频谱信息中同时包括了环境中相对大地坐标系绝对静止和非静止的目标的频
谱信息。应用二维傅里叶变换对目标信噪比(signal
‑
to
‑
noise ratio,snr)的提升优势改善了算法性能。
30.s102,依据装载了雷达的移动设备(本实施例中为机动车)的移动速度信息(同时也为雷达自身的移动速度)以及雷达系统的参数指标,本实施例中为速度检测分辨率,计算出环境绝对静止目标(相对大地坐标系)在目标检测频谱中对应谱信息的多普勒维度索引,并依据该位多普勒维度索引提取所述目标检测频谱信息中绝对静止目标(例如建筑物、栏杆、静止车辆等)的检测频谱信息,也即获得了绝对静止目标的检测频谱信息。
31.s103,计算所述绝对静止目标的检测频谱信息的幅度骤降点h。绝对静止目标的检测频谱信息其中,幅度骤降点h主要代表毫米波雷达当前可接收的最远环境目标回波及杂波对应的距离值,其计算的方法较为灵活,例如可以通过寻找所述绝对静止目标的检测频谱信息全距离段上,所有相邻波峰与波谷的幅度差值的最大值,再依据获得该最大值处波峰波谷分别对应的距离值,取二者的中间值为所述幅度骤降点h。需注意的是,在全fov受限场景下,该骤降点基本是明确的,而在非全fov受限的常规视野受限场景中,由于持续有远方的目标可被检测到,因此不会出现幅度骤降,因此基于幅度骤降点算法寻找到的点是随机跳变的伪骤降点。图4示出了全视野受限场景与普通视野受限场景的绝对静止目标的检测频谱信息分布比对。
32.s104,计算所述幅度骤降点h前、后预设距离段内的幅度分布差异,目的是提取环境中雷达的近距离段与远距离段,即幅度骤降点前后的目标、杂波或系统噪声的幅度分布统计差异。该幅度分布差异的计算方法可以是以下三种方法中的一种:(1)统计所述绝对静止目标的检测频谱信息的上前、后预设距离段内的幅度均值,分别记作ampmean_b、ampmean_a,并进一步得到ampmean_b与ampmean_a的差异ampmeandiff作为所述幅度分布差异;(2)统计所述绝对静止目标的检测频谱信息的上前、后预设距离段内的幅度值的和,分别记作ampsum_b、ampsum_a,并进一步得到ampsum_b与ampsum_a的差异ampsumdiff作为所述幅度分布差异;(3)统计所述绝对静止目标的检测频谱信息的上前、后预设距离段内的幅度值的概率密度函数,并进一步得到这两个概率密度函数的差值来作为所述幅度分布差异。
33.s105,当所述幅度分布差异大于或等于预设阈值时,判断当前雷达所处环境为全视野受限场景,否则判断当前雷达所处环境为普通非视野受限场景。上述预设阈值获取的主要思路为,统计普通视野受限场景中,毫米波雷达电磁波传播路径上的第二表面无异物覆盖时,“绝对静止目标的检测频谱信息”在雷达可检测目标距离范围内,幅度骤降点前后指定距离段的幅度均值差异,并以相同方式,统计全fov受限场景的不同受限距离下,毫米波雷达电磁波传播路径上的第二表面无异物覆盖时,“绝对静止目标的检测频谱信息”在雷达可检测目标距离范围内,幅度骤降点前后指定距离段的幅度均值差异,也即是获得了普通视野受限场景与全视野受限场景下,幅度骤降点前后分布差异的统计边界,并基于此确定全视野受限场景识别的判定阈值(记作ampmeandiff_thrd),最后将该阈值作为全视野受限场景识别算法的输入,实现毫米波雷达的实时全视野受限场景的自检测,完成毫米波雷达对真正直接异物覆盖而致遮挡与非直接异物覆盖(全视野受限场景)而致
‘
伪’遮挡的自适应判断。图5示出了雷达全视野受限场景检测结果。
34.在一个扩展实施例中,请参考图6所示,将上述实施例的全视野受限场景的识别方
法在应用在雷达遮挡检测功能中,以进行遮挡检算时,可以包括如下步骤:雷达启动后,执行雷达遮挡检测,若判断所述雷达处于遮挡状态时,执行所述步骤s10,并且在步骤s10的结果是当前雷达所处环境为普通非视野受限遮挡时,输出雷达被遮挡的报警信号,在步骤s10的结果是当前雷达所处环境为全视野受限场景,则雷达未被遮挡,完成检测。
35.在另一个扩展实施例中,请参考图7所示,将上述实施例的全视野受限场景的识别方法在应用在雷达遮挡检测功能,可以包括如下步骤:雷达启动后,将执行所述步骤s10的结果输出到雷达遮挡检测流程,当步骤s10的结果为当前雷达所处环境为普通非视野受限场景时,取消遮挡检测功能,否则执行遮挡检测功能。
36.综上,本发明的雷达视野受限场景识别方法是以雷达回波对应的目标检测频谱(detection spectrum)作为输入,并依据车速信息及雷达系统的相关参数指标,计算环境中的绝对静止目标(建筑物、栏杆、静止车辆等)在目标检测频谱上对应多普勒维度索引,基于该索引提取全距离段数据,记为“绝对静止目标的检测频谱信息”,基于该“绝对静止目标的检测频谱信息”,提取环境中近距离段与远距离段(距离雷达)目标及杂波的分布差异,进而依据差异程度判定当前雷达是否处于全fov受限场景。
37.本发明的雷达视野受限场景识别方法适宜应用于装载在可移动设备上的雷达。该方法充分考虑了全视野受限场景可能存在的情况,有效地实现了雷达对自身视野受限场景情况进行自检测,同时,该方法鲁棒性强,对算力要求低,改善了雷达系统自诊断功能的准确性,且满足雷达诊断应用的实时性。
38.在其他实施例中,通过幅度骤降点前、后指定距离段的幅度均值做差获得的幅度分布差异ampmeandiff也可对幅度骤降点前、后指定距离段的幅度均值使用其他计算方式获得,如以系统噪声作为参考值,计算幅度骤降点前、后指定距离段的幅度均值相对该参考值的比重大小,并进一步计算比重大小的差异。
39.在其他实施例中,步骤s101中目标检测频谱信息通过各个接收通道信号的傅里叶变换结果做非相干积累的方式获得也可替换为目标检测频谱信息通过各个接收通道信号的傅里叶变换结果做相干积累的方式获得。
40.在实际应用中,上述方法以指令的形式被存储在存储介质中,该存储介质被装在在设置有处理器的车载设备或其他电子设备中,这些车载设备或其他电子设备可通过所述处理器调用存储介质中的指令,以实现上述雷达视野受限场景识别方法。
41.虽然对本发明的描述是结合以上具体实施例进行的,但是,熟悉本技术领域的人员能够根据上述的内容进行许多替换、修改和变化、是显而易见的。因此,所有这样的替代、改进和变化都包括在附后的权利要求的精神和范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1