区域内污染的溯源方法与流程
1.本发明涉及污染监测,特别涉及区域内污染的溯源方法。
背景技术:
2.工业园区环境大气中的污染物质来源复杂,某一物质的来源往往在其上风向有多个疑似排放口,且排放源排放的污染物扩散至排放口的路径方向不唯一。当只存在单一排放源对观测点位产生影响时,人为定性多个源中的单一源仍存在较大难度。现有的技术手段是基于监测点位的风向、风速、浓度信息定位监测点位上风向,通过假设风向不变,确定可能的排放源。这种技术方案存在溯源准确度差等不足。
技术实现要素:
3.为解决上述现有技术方案中的不足,本发明提供了一种区域内污染的溯源方法。
4.本发明的目的是通过以下技术方案实现的:
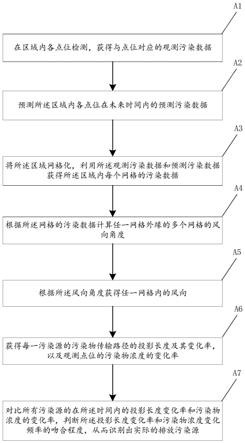
5.区域内污染的溯源方法,所述区域内污染的溯源方法包括以下步骤:
6.(a1)在所述区域内各点位检测,获得与点位对应的观测污染数据,污染数据包括污染物的浓度;
7.(a2)预测所述区域内各点位在未来时间内的预测污染数据;
8.(a3)将所述区域网格化,利用所述观测污染数据和预测污染数据获得所述区域内每个网格的污染数据;
9.(a4)根据所述网格的污染数据计算任一网格外缘的多个网格的风向角度d
i
,i=1,2
···
n,n=8;
10.(a5)根据所述风向角度d
i
获得任一网格内的风向d
ave
,进而获得污染物的传输路径;
11.(a6)获得每一污染源的污染物传输路径的投影长度w
i
及其变化率δ
i
,以及观测点位的污染物浓度的变化率δ
i
;
12.(a7)对比所有污染源的在一定时间内的投影长度变化率δ
i
和污染物浓度的变化率δ
i
,同步间隔时间t
0i
是根据风速和网格内的风向角度获得每一污染源排放的污染物传输到监测点位所需的时间;
13.判断所述投影长度变化率δ
i
和污染物浓度变化频率δ
i
的吻合程度,从而识别出实际的排放污染源。
14.与现有技术相比,本发明具有的有益效果为:
15.1.获取小尺度精细化网格下的传输路径,将大尺度扩散过程精细至小网格,细化污染物传输扩散过程;
16.2.该方法通过比对观测点位与多个排放源之间的变化率情况,实现单个物质精准溯源;
17.3.兼容性强,可融合任何形式和分辨率的监测数据,可追溯任何污染物质的排放
源。
附图说明
18.参照附图,本发明的公开内容将变得更易理解。本领域技术人员容易理解的是:这些附图仅仅用于举例说明本发明的技术方案,而并非意在对本发明的保护范围构成限制。图中:
19.图1是根据本发明实施例的区域内污染的溯源方法的流程图;
20.图2是根据本发明实施例的污染物扩散路径示意图。
具体实施方式
21.图1
‑
2和以下说明描述了本发明的可选实施方式以教导本领域技术人员如何实施和再现本发明。为了教导本发明技术方案,已简化或省略了一些常规方面。本领域技术人员应该理解源自这些实施方式的变型或替换将在本发明的范围内。本领域技术人员应该理解下述特征能够以各种方式组合以形成本发明的多个变型。由此,本发明并不局限于下述可选实施方式,而仅由权利要求和它们的等同物限定。
22.实施例1:
23.图1给出了本发明实施例的区域内污染的溯源方法的流程图,如图1所示,所述区域内污染的溯源方法包括以下步骤:
24.(a1)在所述区域内各点位检测,获得与点位对应的观测污染数据,污染数据包括污染物的浓度;
25.(a2)预测所述区域内各点位在未来时间内的预测污染数据;
26.(a3)将所述区域网格化,利用所述观测污染数据和预测污染数据获得所述区域内每个网格的污染数据;
27.(a4)根据所述网格的污染数据计算任一网格外缘的多个网格的风向角度d
i
,i=1,2
···
n,n=8;
28.(a5)根据所述风向角度d
i
获得任一网格内的风向d
ave
,进而获得污染源的传输路径;
29.(a6)获得每一污染源的污染物传输路径的投影长度w
i
及其变化率δ
i
,以及观测点位的污染物浓度的变化率δ
i
;
30.(a7)对比所有污染源的在一定时间内的投影长度变化率δ
i
和污染物浓度的变化率δ
i
,同步间隔时间t
0i
是根据风速和网格内的风向角度获得每一污染源排放的污染物传输到监测点位所需的时间;
31.判断所述投影长度变化率δ
i
和污染物浓度变化率δ
i
的吻合程度,从而识别出实际的排放污染源,实际的排放污染源仅有一个。
32.为了准确地获得各网格内的风向,进一步地,在步骤(a4)中,风向角度d
i
满足:网格污染数据q是污染源源强,δ
y
是y轴上的方差,是常数。
33.为了准确地获得每个网格的污染数据,进一步地,在步骤(a3)中,利用可变带宽核密度估计法获得所述网格的污染数据,可变带宽核密度估计法是本领域的现有技术。
34.为了准确地获得网格内的风向,进一步地看,在步骤(a5)中,风向
35.为了精确地获得时间t
0i
,在步骤(a7)中,时间m是传输路径上经过的网格数量,u是风速。
36.为了准确地获得投影长度,进一步地,在步骤(a6)中,投影长度m是传输路径上经过的网格数量,污染源到观测点位的直线路径与垂直方向的角度分别为θ
i
。
37.为了准确地判断吻合程度,进一步地,利用相关性判断所述投影长度变化率δ
i
和污染物浓度变化率δ
i
的吻合程度。
38.实施例2:
39.根据本发明实施例1的区域内污染的溯源方法在工业园区中的应用例。
40.在该应用例中,如图2所示,工业园区有50平方公里,具有4个污染源,区域内污染的溯源方法包括以下步骤:
41.(a1)在所述区域内各点位检测,如走航观测、定点观测或便携式观测,获得与点位对应的观测污染数据,污染数据包括污染物的浓度;
42.(a2)采用长期短期记忆网络lstm的方法,此方法通过机器学习的原理对历史数据的变化规律进行统计分析,预测所述区域内6小时内各点位在未来时间内的预测污染数据;
43.(a3)如图2所示,将所述区域网格化,划分为10m
×
10m的网格,利用可变带宽核密度估计法,基于所述观测污染数据和预测污染数据获得所述区域内每个网格的污染数据;
44.核密度估计法中密度函数积分为f(x),n表示样本点个数,则核密度估计方程如下:
[0045][0046]
其中h表示带宽,k表示核函数;
[0047]
(a4)根据所述网格的污染数据计算任一网格外缘的多个网格的风向角度d
i
,i=1,2
···
n,n=8;
[0048]
风向角度d
i
满足:网格的污染数据(浓度)q是污染源源强,δ
y
是y轴上的方差,是常数,
[0049]
(a5)根据所述风向角度d
i
获得任一网格内的风向若网格在区域的角落,n=3;若网格在区域的边界处,n=5;若网格在区域的内部,n=8;
[0050]
根据每个网格的风向获得污染物传输路径;
[0051]
(a6)获得每一污染源的污染物传输路径的投影长度及1小时内的变化率δ
i
,以及观测点位的1小时内污染物浓度的变化率δ
i
;m是污染物传输路径上经过的网格数量,污染源到观测点位的直线路径与垂直方向的角度分别为θ
i
;如图2所示,长直线是实际传输路径的投影,折线是实际传输路径;
[0052]
(a7)对比所有污染源的在时间t
0i
内的投影长度变化率δ
i
和污染物浓度的变化率δ
i
,同步间隔时间t
0i
是根据风速和网格内的风向角度获得每一污染源排放的污染物传输到监测点位所需的时间m是传输路径上经过的网格数量,四个污染源,u是风速分别,从而计算出四个时间t
01
、t
02
、t
03
、t
04
;
[0053]
判断所述投影长度变化率δ
i
和污染物浓度变化率δ
i
的吻合程度,从而识别出实际的排放污染源最可能是2号污染源;判断的方式为:利用变化率δ
i
和污染物浓度变化率间的相关性判断;
[0054]
气象验证;用所述预测污染数据和点位未来气象数据b1进行反演(仍是机器学习的方法),反推获得该点位的历史浓度a2,再将历史浓度网格化,该网格化浓度与所述每个网格的污染数据的历史点位浓度a3,通过非参数误差估计方法(统计学方法)判断点位未来气象数据b1的可信度,若气象数据b1的可信度高,那么溯源结果的可信度高,若气象数据b1的可信度低,那么溯源结果的可信度低。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1