一种基于陀螺和精电视信号融合的扰动解耦与抑制方法
1.本发明涉及惯性稳定控制领域,具体涉及一种基于陀螺和精电视信号融合的扰动解耦与抑制方法。
背景技术:
2.装载在运动载体上的光电跟踪系统会受到来自载体以及自身的各种扰动,直接影响系统的目标跟踪精度。传统方法多是在机架上安装传感器,利用传感器信号通过多回路闭环来提高系统扰动抑制带宽,从而提高扰动抑制能力。但此方法的控制带宽受限于传感器采样频率、机械谐振、控制对象质量等因素,扰动的抑制能力不足。针对系统扰动抑制带宽不足的问题,本发明提出一种基于陀螺和精电视信号融合的扰动解耦与抑制方法,该方法通过设计互补滤波器,利用惯性速率陀螺信号解耦中高频特性的扰动和精电视信号解耦低频的目标和扰动信号,利用快反镜进行扰动抑制,并且不损失系统的目标跟踪能力。
技术实现要素:
3.本发明要解决的技术问题为:提出一种基于陀螺和精电视信号融合的扰动解耦与抑制方法,主要通过解耦惯性传感器速率陀螺信号和精电视脱靶量信号,再通过融合信号前馈控制的方法解决光电跟踪系统扰动抑制能力不足的问题,并同时提升系统的目标跟踪能力。
4.为解决上述技术问题,本发明采用了以下技术方案:
5.一种基于陀螺和精电视信号融合的扰动解耦与抑制方法,应用于光电跟踪系统,该方法包括如下步骤:
6.步骤(1),将粗电视装载于光电跟踪系统的机架上,惯性速率陀螺装载于机架的方位轴和俯仰轴上,该惯性速率陀螺产生陀螺信号,以用于形成粗跟踪速度回路闭环,从而获得粗跟踪速度回路对扰动d(s)抑制之后的等效残差d'(s),所述d'(s)为:其中,g1(s)为光电跟踪系统的机架的真实速度特性,c
v
(s)为粗跟踪速度回路控制器,s为拉普拉斯算子;
7.步骤(2),基于所述等效残差d'(s)和陀螺信号获得高频扰动信号d
fh
,所述d
fh
为:
[0008][0009]
其中,u(s)为陀螺角速率信号,c
p
(s)为粗跟踪位置回路控制器,r(s)为目标信号,且为低频信号,g
h
(s)为高通滤波器,g(s)为粗跟踪速度回路闭环特性;
[0010]
步骤(3),将精电视安装于机架内部,精电视测量经快反镜反射来的目标偏差信息,获得精电视脱靶量信号e
′
(s),该信号用于精跟踪位置回路闭环,将精电视脱靶量信号
e
′
(s)进行低通滤波处理,得到低频信号d
fl
,所述d
fl
为;
[0011][0012]
其中,g
l
(s)为低通滤波器,c
f
(s)为精跟踪位置回路控制器,m(s)为快反镜电涡流闭环回路传递函数;
[0013]
步骤(4),将步骤(2)和步骤(3)中分别得到的信号d
fh
和d
fl
进行融合,再经过前馈控制器c1(s)后得到前馈信号d
f
,所述前馈控制器c1(s)为快反镜电涡流闭环回路传递函数m(s)的逆c1(s)=m(s)
‑1。
[0014]
其中,所述粗跟踪速度回路闭环特性为
[0015]
其中,步骤(3)中的低通滤波器与步骤(2)中的高通滤波器互补,且该低通滤波器与高通滤波器根据实际的陀螺角速率和精电视特性进行频率点设计。
[0016]
本发明的技术方案中,光电跟踪系统的机架上装载粗电视,其视场中心为设备视轴方向,目标脱靶量信号用于粗跟踪位置回路闭环。惯性速率陀螺装载于机架的方位轴和俯仰轴上,陀螺信号用于粗跟踪速度回路闭环。该惯性速率陀螺测量信息为:
[0017][0018]
将得到的陀螺信号高通滤波后进行积分,得到所述高频扰动信号d
fh
,
[0019][0020]
其中d
fh
为陀螺信号滤波积分后的高频部分;g
h
(s)为高通滤波器;由于通过高通滤波器后低频目标信号r(s)被滤除则得到r(s)g
h
(s)=0,因此,
[0021]
精电视安装在机架内部,测量经快反镜反射来的目标偏差信息,精电视信号用于精跟踪回路闭环,获得精电视脱靶量信号e
′
(s)为:
[0022][0023]
其中,m(s)为快反镜电涡流回路闭环特性,其中的c
e
(s)为电涡流回路控制器,g2(s)为真实快反镜特性;将精电视脱靶量信号进行低通滤波处理,低
通滤波器与步骤(2)中的高通滤波器互补,得到包含低频的扰动信息和脱靶量信号融合的低频信号d
fl
;
[0024][0025]
其中,d
fl
为融合信号低频部分,由于低频目标信号r(s)能够通过低频滤波器,则r(s)g
l
(s)=r(s)。得到的信号d
fh
和d
fl
进行融合,再经过前馈控制器c1(s)后得到前馈信号d
f
,所述d
f
为:
[0026][0027]
传统复合轴的扰动抑制能力为:
[0028][0029]
其中,y
d1
(s)为传统复合轴的扰动抑制能力;将融合信号前馈到精跟踪电涡流回路构成精稳定控制,全系统的扰动抑制能力为:
[0030][0031]
其中,y
d2
(s)为加入前馈控制后全系统的扰动抑制能力;在低频段:g
l
(s)d(s)=d(s),g
h
(s)d(s)=0,则其中,为精跟踪回路系统闭环特性,在精跟踪回路闭环带宽内,即系统扰动抑制能力在低频段约等于传统复合轴系统在低频段的扰动抑制能力。在高频段,g
h
(s)d(s)=d(s),g
l
(s)d(s)=0,则系统的扰动抑制能力为:
[0032]
其中,c1(s)设计为快反镜电涡流闭环回路传递函数m(s)的逆c1(s)=m(s)
‑1,即c1(s)m(s)≈1,则在传递函数c1(s)m(s)带宽内y
d
(s)≈0,相比传统复合轴系统,扰动抑制能力在高频段有所提高。
[0033]
传统复合轴系统对目标的跟踪误差为:
其中,e
r1
(s)为传统复合轴系统对目标的跟踪误差;加入前馈控制后系统对目标的跟踪误差为:其中,e
r2
(s)为加入前馈控制系统对目标的跟踪误差;在传递函数c1(s)m(s)的带宽内c1(s)m(s)≈1,
[0034]
可见,加入前馈后的系统目标跟踪能力没有影响。
[0035]
本发明与现有方法相比具有如下优点:
[0036]
(1)本发明通过解耦并利用惯性传感器中的高频信息,避免了惯性传感器低频漂移的问题,通过解耦并利用精电视传感器中的低频信息,避免了精电视传感器高频采样能力不足的问题,并通过融合获得传感器能够感测到的扰动,解耦精度高。
[0037]
(2)本发明在提高系统的扰动抑制能力的同时,不损失系统的目标跟踪能力。
[0038]
(3)本发明结构简单,易于实现。
附图说明
[0039]
图1是本发明的系统结构示意图,其中,1为设备机架,2为俯仰轴,3为方位轴,4为速率陀螺a,5为速率陀螺e,6为快反镜,7为精电视,8为粗电视;
[0040]
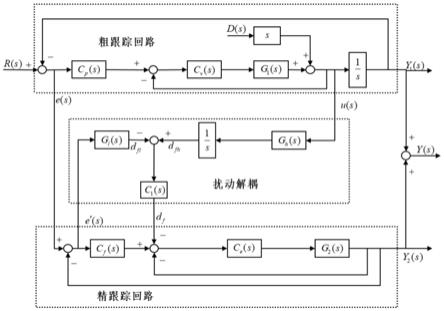
图2是本发明的控制结构图,其中,g1(s)为机架的真实速度特性;c
v
(s)为粗跟踪速度回路控制器;c
p
(s)为粗跟踪位置回路控制器;u(s)为角速率陀螺信号;e(s)为粗电视脱靶量信号;e
′
(s)为精电视脱靶量信号;g
l
(s)为低通滤波器;g
h
(s)为高通滤波器;c1(s)为前馈控制器;d
f
为前馈信号;c
e
(s)为精跟踪电涡流回路控制器;g2(s)为真实快反镜特性;c
f
(s)为精跟踪位置回路控制器;r(s)为目标信号;y(s)为系统的输出;d(s)扰动输入;
[0041]
图3是本发明的有无陀螺和精电视信号解耦扰动前馈系统扰动抑制对比伯德图;
[0042]
图4是本发明的有无陀螺和精电视信号解耦扰动前馈系统对目标的跟随误差伯德图;
[0043]
图5是本发明在运动平台进行目标跟踪时,有无陀螺和精电视信号解耦扰动前馈系统的目标跟踪误差对比仿真图。
具体实施方式
[0044]
本发明通过设计互补滤波器,利用惯性速率陀螺信号解耦中高频特性的扰动和精电视信号解耦低频的目标和扰动信号,利用快反镜进行扰动抑制,并且不损失系统的目标跟踪能力。
[0045]
且本发明包括以下步骤:
[0046]
步骤(1),在光电跟踪系统的机架上装载粗电视,其视场中心为设备视轴方向,目
标脱靶量信号用于粗跟踪位置回路闭环,惯性速率陀螺装载于机架的方位轴和俯仰轴上,该陀螺测量机架在惯性空间内的运动速度,并将测量速度与输入期望值的差值反馈到驱动电机,构成粗跟踪速度回路闭环,其回路的闭环特性为:其中,g1(s)为机架的真实速度特性;c
v
(s)为粗跟踪速度回路控制器;g(s)为粗跟踪速度回路闭环特性。粗跟踪速度回路对扰动抑制之后的扰动残差为:其中d'(s)为扰动d(s)经粗跟踪速度回路抑制之后的等效残差。
[0047]
步骤(2),惯性速率陀螺测量信息为:
[0048]
其中:u(s)为陀螺角速率信号;c
p
(s)为粗跟踪位置回路控制器;e(s)为粗电视脱靶量信号;r(s)为目标信号,为低频信号。将得到的陀螺信号高通滤波后进行积分,得到高频扰动信号d
fh
,其中d
fh
为陀螺信号滤波积分后的高频部分;g
h
(s)为高通滤波器;则r(s)g
h
(s)=0;
[0049][0050]
步骤(3),将精电视安装在机架内部,测量经快反镜反射来的目标偏差信息,精电视信号用于精跟踪回路闭环,精电视测量信号为:
[0051][0052]
其中,e
′
(s)为精电视脱靶量信号;y2(s)为精跟踪回路输出信号;c
f
(s)为精跟踪位置回路控制器;m(s)为快反镜电涡流回路闭环特性,其中c
e
(s)为电涡流回路控制器;g2(s)为真实快反镜特性;将精电视脱靶量信号进行低通滤波处理,低通滤波器与步骤(2)中的高通滤波器互补,得到包含低频扰动和脱靶量融合的低频信号d
fl
,
[0053]
其中,d
fl
为融合信号低频部分;g
l
(s)为低通滤波器;则r(s)g
l
(s)=r(s)。
[0054]
步骤(4),将步骤(2)和步骤(3)中得到的信号d
fh
和d
fl
进行融合,再经过前馈控制器c1(s)后得到前馈信号d
f
:
[0055][0056]
其中,d
f
为前馈信号;c1(s)为前馈控制器。
[0057]
传统复合轴的扰动抑制能力为:
[0058]
其中,y
d1
(s)为传统复合轴的扰动抑制能力;将融合信号前馈到精跟踪电涡流回路构成精稳定控制,全系统的扰动抑制能力为:其中,y
d2
(s)为加入前馈控制后全系统的扰动抑制能力;在低频段:g
l
(s)d(s)=d(s),g
h
(s)d(s)=0,则其中,为精跟踪回路系统闭环特性。在精跟踪回路闭环带宽内,即系统扰动抑制能力在低频段约等于传统复合轴系统在低频段的扰动抑制能力。在高频段,g
h
(s)d(s)=d(s),g
l
(s)d(s)=0,则系统的扰动抑制能力为:其中,c1(s)设计为快反镜电涡流闭环回路传递函数m(s)的逆c1(s)=m(s)
‑1,即c1(s)m(s)≈1,则在传递函数c1(s)m(s)带宽内y
d
(s)≈0,相比传统复合轴系统,扰动抑制能力在高频段有所提高。
[0059]
传统复合轴系统对目标的跟踪误差为:其中,e
r1
(s)为传统复合轴系统对目标的跟踪误差;加入前馈控制后系统对目标的跟踪误差为:
[0060][0061]
其中,e
r2
(s)为加入前馈控制系统对目标的跟踪误差;在传递函数c1(s)m(s)的带
宽内c1(s)m(s)≈1,,(s)m(s)≈1,,即加入前馈后的系统目标跟踪能力没有影响。
[0062]
进一步的,步骤(2)和步骤(3)中高通与低通滤波器应根据实际角速率陀螺和精电视特性进行频率点设计。
[0063]
以下结合附图对本发明的具体实施方式做详细说明,本领域的技术人员可根据本说明书揭示的内容了解本发明的功效及优点。
[0064]
(1)图1所示为本发明系统结构示意图,在机架设备的方位轴和俯仰轴上分别安装角速率陀螺a、e,测量设备的角速度用于粗跟踪速度回路闭环。系统传递特性由频响仪测得,设机架速度特性传递函数为:根据机架的速度特性,通过零极点对消法设计速度回路的控制器为:在机架上安装粗电视传感器,敏感目标相对视轴的偏差用于粗跟踪位置回路闭环。粗跟踪和精跟踪位置回路可设计为简单pi控制器的形式,粗跟踪位置回路的控制器设计为:精电视安装在机架内部,测量通过快反镜反射的目标偏差,用于精跟踪回路闭环。精跟踪回路控制器设计为:
[0065]
(2)设计解耦所需要的高通与低通滤波器,因为陀螺信号中的低频信号前馈会导致系统目标跟踪能力下降,为了保证高通滤波器的低频抑制能力,设计高通与低通滤波器为二阶形式,且滤波器的截止频率大约为10hz,高通与低通滤波器的标准形式为:其中的g0为滤波器的通带增益或零频增益,ω
n
为二阶滤波器的自然角频率,ξ为2阶滤波器的阻尼系数,并根据实际系统信号在matlab的sisotool工具箱中进行调整,设计高通滤波器为:设计低通滤波器为:由于精电视测得的扰动信号为负,所以陀螺信号经过高通滤波器,再经积分器后需要与精电视信号经过低通滤波器后相减进行融合。融合后的信号经过前馈控制器即为前馈信号。
[0066]
(3)设计精跟踪回路电涡流控制器、根据电涡流闭环回路设计前馈控制器,为保证控制器的物理实现,实际设计为:n为m(s)的阶数差,t为常系数,则前馈控制器设计为:
[0067][0068]
通过本发明中的方法解耦陀螺信号与精电视信号后融合扰动信息,后利用快反镜进行扰动抑制的结果如图3所示。由图3可知,传统复合轴系统的扰动抑制带宽只有25hz,加入陀螺和精电视解耦扰动前馈控制后的系统的扰动抑制带宽为117hz,在20hz
‑
70hz频率处的扰动抑制能力显著提高,在37.6hz频率处扰动抑制能力提高了64.3db。由图4可知,系统的目标跟随误差伯德图在2hz
‑
16hz处均有降低,说明系统的目标跟随能力没有降低。加入陀螺和精电视解耦扰动前馈控制实测信号的仿真图如图5所示,加入前馈控制后系统的均方根值(rms)由26.28降低到13.49。目标跟随效果和扰动抑制结果说明了本发明的有效性。
[0069]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,这些实施例仅仅是为了说明的目的,而并非为了限制本发明的范围。本发明的范围由所附权利要求及其等价物限定。不脱离本发明的范围,本领域技术人员可以做出多种替代和修改,这些替代和修改都应落在本发明的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1