纯横波的横波分裂校正方法、装置、设备及存储介质与流程
1.本技术涉及地震勘探技术领域,特别涉及一种纯横波的横波分裂校正方法、装置、设备及存储介质。
背景技术:
2.目前,纯横波分裂技术在地震勘探领域的应用越来越多广泛。例如,通过纯横波分裂技术实现待测工区的构造成像、油气预测和裂缝检测等。在通过纯横波分裂技术对待测工区的油气进行预测的过程中,当待测工区的地层介质为各向异性介质时,为了确定纯横波对应的横波波场,有时需要对纯横波进行分裂校正。
技术实现要素:
3.本技术实施例提供了一种纯横波的横波分裂校正方法、装置、设备及存储介质,可以提高横波分裂校正后得到的横波波场的准确性。所述技术方案如下:
4.一方面,本技术提供了一种纯横波的横波分裂校正方法,所述方法包括:
5.获取待测的工区的地层的裂缝方向信息,以及,获取所述工区内的目标检波器接收的第一纯横波数据;
6.当所述裂缝方向信息用于表示裂缝方向为固定方向时,根据所述裂缝方向信息,确定所述第一纯横波数据对应的快横波和慢横波,所述快横波为平行于所述裂缝方向的横波,所述慢横波为垂直于所述裂缝方向的横波;
7.确定所述快横波和所述慢横波的时间差,根据所述时间差,对所述慢横波进行校正,得到校正慢横波;
8.根据所述裂缝方向信息、所述快横波和所述校正慢横波,确定所述第一纯横波数据对应的第一校正横波波场。
9.在一种可能的实现方式中,所述根据所述裂缝方向信息,确定所述第一纯横波数据对应的快横波和慢横波,包括:
10.获取目标震源和所述目标检波器之间的炮检连线方向,确定所述裂缝方向与所述炮检连线方向之间的第一角度差,所述目标震源为所述工区内激发所述第一纯横波数据的震源;
11.确定第一目标纯横波和第二目标纯横波;
12.根据所述第一角度差,对所述第一目标纯横波和所述第二目标纯横波进行二分量旋转,得到所述第一纯横波数据对应的快横波和慢横波。
13.在一种可能的实现方式中,所述第一纯横波数据包括第一纯横波和第二纯横波;
14.所述确定第一目标纯横波和第二目标纯横波,包括:
15.获取所述工区内多个检波器的测线方向,确定所述炮检连线方向与所述测线方向之间的第二角度差;
16.确定所述第一纯横波对应的第一分量波和第二分量波,以及所述第二纯横波对应
的第三分量波和第四分量波,所述第一分量波为所述第一纯横波沿所述测线方向的分量波,所述第二分量波为所述第一纯横波沿所述测线方向的垂直方向的分量波,所述第三分量波为所述第二纯横波沿所述测线方向的分量波,所述第四分量波沿为所述第二纯横波沿所述测线方向的垂直方向的分量波;
17.根据所述第二角度差、所述第一分量波、所述第二分量波、所述第三分量波和所述第四分量波,确定第一目标纯横波和第二目标纯横波。
18.在一种可能的实现方式中,所述确定所述快横波和所述慢横波的时间差,包括:
19.确定所述快横波对应的快横波剖面和所述慢横波对应的慢横波剖面,所述快横波剖面包括多个第一层位波的层位标识和层位时间,所述慢横波剖面包括所述多个第二层位波的层位标识和层位时间;
20.根据所述多个第一层位波对应的层位标识和层位时间以及所述多个第二层位波对应的层位标识和层位时间,确定每个第一层位波与所述第一层位波对应的第二层位波之间的时间差,得到所述快横波和所述慢横波的时间差;
21.其中,所述第一层位波对应的第二层位波的深度与所述第一层位波的深度为同一深度。
22.在一种可能的实现方式中,所述第一纯横波数据包括第一纯横波和第二纯横波;所述确定所述快横波对应的快横波剖面和所述慢横波对应的慢横波剖面,包括:
23.获取所述工区内多个检波器的测线方向,确定所述裂缝方向与所述测线方向之间的第三角度差;
24.确定所述第一纯横波对应的第一分量波和第二分量波,以及所述第二纯横波对应的第三分量波和第四分量波,所述第一分量波为所述第一纯横波沿所述测线方向的分量波,所述第二分量波为所述第一纯横波沿所述测线方向的垂直方向的分量波,所述第三分量波为所述第二纯横波沿所述测线方向的分量波,所述第四分量波沿为所述第二纯横波沿所述测线方向的垂直方向的分量波;
25.根据所述第三角度差、所述第一分量波、所述第二分量波、所述第三分量波和所述第四分量波,确定所述快横波对应的快横波剖面和所述慢横波对应的慢横波剖面。
26.在一种可能的实现方式中,所述第一校正横波波场包括sh横波波场和sv横波波场;所述根据所述裂缝方向信息、所述快横波和所述校正慢横波,确定所述第一纯横波数据对应的第一校正横波波场,包括:
27.对于所述工区内的任一目标震源,获取所述目标震源和所述目标检波器之间的炮检连线方向,确定所述裂缝方向与所述炮检连线方向之间的第一角度差,所述目标震源为所述工区内激发所述第一纯横波数据的震源;
28.根据所述第一角度差,对所述快横波和所述校正慢横波进行反旋转,得到所述第一纯横波数据对应的sh横波波场和所述第一纯横波数据对应的sv横波波场。
29.在一种可能的实现方式中,所述方法还包括:
30.当所述裂缝方向信息用于表示所述裂缝方向随深度变化时,确定所述裂缝方向信息对应的多个裂缝时窗;
31.获取所述多个裂缝时窗对应的第二纯横波数据以及每个裂缝时窗对应的目标时间差和目标裂缝方向;
32.根据所述每个裂缝时窗对应的目标时间差和目标裂缝方向,对所述第二纯横波数据进行横波分裂校正,得到所述第二纯横波数据对应的第二校正横波波场。
33.另一方面,本技术提供了一种横波的分裂波信息的确定装置,所述装置包括:
34.获取模块,用于获取待测的工区的地层的裂缝方向信息,以及,获取所述工区内的目标检波器接收的第一纯横波数据;
35.第一确定模块,用于当所述裂缝方向信息用于表示裂缝方向为固定方向时,根据所述裂缝方向信息,确定所述第一纯横波数据对应的快横波和慢横波,所述快横波为平行于所述裂缝方向的横波,所述慢横波为垂直于所述裂缝方向的横波;
36.第二确定模块,用于确定所述快横波和所述慢横波的时间差,根据所述时间差,对所述慢横波进行校正,得到校正慢横波;
37.第三确定模块,用于根据所述裂缝方向信息、所述快横波和所述校正慢横波,确定所述第一纯横波数据对应的第一校正横波波场。
38.在一种可能的实现方式中,所述第一确定模块,包括:
39.获取单元,用于获取目标震源和所述目标检波器之间的炮检连线方向,确定所述裂缝方向与所述炮检连线方向之间的第一角度差,所述目标震源为所述工区内激发所述第一纯横波数据的震源;
40.第一确定单元,用于确定第一目标纯横波和第二目标纯横波;
41.旋转单元,用于根据所述第一角度差,对所述第一目标纯横波和所述第二目标纯横波进行二分量旋转,得到所述第一纯横波数据沿所述裂缝分裂得到的快横波和慢横波。
42.在另一种可能的实现方式中,所述第一纯横波数据包括第一纯横波和第二纯横波;
43.所述第一确定单元,用于获取所述工区内多个检波器的测线方向,确定所述炮检连线方向与所述测线方向之间的第二角度差;确定所述第一纯横波对应的第一分量波和第二分量波,以及所述第二纯横波对应的第三分量波和第四分量波,所述第一分量波为所述第一纯横波沿所述测线方向的分量波,所述第二分量波为所述第一纯横波沿所述测线方向的垂直方向的分量波,所述第三分量波为所述第二纯横波沿所述测线方向的分量波,所述第四分量波沿为所述第二纯横波沿所述测线方向的垂直方向的分量波;根据所述第二角度差、所述第一分量波、所述第二分量波、所述第三分量波和所述第四分量波,确定第一目标纯横波和第二目标纯横波。
44.在另一种可能的实现方式中,所述第二确定模块,包括:
45.第二确定单元,用于确定所述快横波对应的快横波剖面和所述慢横波对应的慢横波剖面,所述快横波剖面包括多个第一层位波的层位标识和层位时间,所述慢横波剖面包括所述多个第二层位波的层位标识和层位时间;
46.第三确定单元,用于根据所述多个第一层位波对应的层位标识和层位时间以及所述多个第二层位波对应的层位标识和层位时间,确定每个第一层位波与所述第一层位波对应的第二层位波之间的时间差,得到所述快横波和所述慢横波的时间差;
47.其中,所述第一层位波对应的第二层位波的深度与所述第一层位波的深度为同一深度。
48.在另一种可能的实现方式中,所述第一纯横波数据包括第一纯横波和第二纯横
波;
49.所述第二确定单元,用于获取所述工区内多个检波器的测线方向,确定所述裂缝方向与所述测线方向之间的第三角度差;确定所述第一纯横波对应的第一分量波和第二分量波,以及所述第二纯横波对应的第三分量波和第四分量波,所述第一分量波为所述第一纯横波沿所述测线方向的分量波,所述第二分量波为所述第一纯横波沿所述测线方向的垂直方向的分量波,所述第三分量波为所述第二纯横波沿所述测线方向的分量波,所述第四分量波沿为所述第二纯横波沿所述测线方向的垂直方向的分量波;根据所述第三角度差、所述第一分量波、所述第二分量波、所述第三分量波和所述第四分量波,确定所述快横波对应的快横波剖面和所述慢横波对应的慢横波剖面。
50.在一种可能的实现方式中,所述第一校正横波波场包括sh横波波场和sv横波波场;所述第三确定模块,用于对于所述工区内的任一目标震源,获取所述目标震源和所述目标检波器之间的炮检连线方向,确定所述裂缝方向与所述炮检连线方向之间的第一角度差,所述目标震源为所述工区内激发所述第一纯横波数据的震源;根据所述第一角度差,对所述快横波和所述校正慢横波进行反旋转,得到所述第一纯横波数据对应的sh横波波场和所述第一纯横波数据对应的sv横波波场。
51.在一种可能的实现方式中,所述装置还包括:
52.第四确定模块,用于当所述裂缝方向信息用于表示所述裂缝方向随深度变化时,确定所述裂缝方向信息对应的多个裂缝时窗;获取所述多个裂缝时窗对应的第二纯横波数据以及每个裂缝时窗对应的目标时间差和目标裂缝方向;根据所述每个裂缝时窗对应的目标时间差和目标裂缝方向,对所述第二纯横波数据进行横波分裂校正,得到所述第二纯横波数据对应的第二校正横波波场。
53.另一方面,本技术实施例提供了一种计算机设备,所述计算机设备包括:处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行以实现上述任一可能实现方式所述的纯横波的横波分裂校正方法中所执行的操作。
54.另一方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行以实现上述任一可能实现方式所述的纯横波的横波分裂校正方法中所执行的操作。
55.本技术实施例提供的技术方案的有益效果至少包括:
56.本技术实施例提供了一种纯横波的横波分裂校正方法,由于对于各向异性介质的地层,通过快横波和慢横波的时间差,对慢横波进行校正,消除了方位各向异性的影响,进而通过将快横波与校正慢横波进行反旋转,得到的横波波场的准确性高。
附图说明
57.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
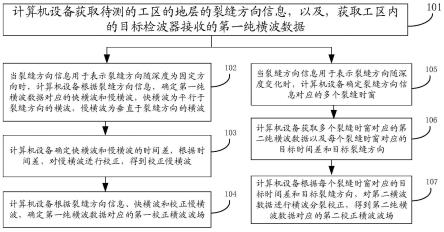
58.图1是根据一示例性实施例示出的一种纯横波的横波分裂校正方法的流程图;
59.图2是根据一示例性实施例示出的一种纯横波的四分量数据的示意图;
60.图3是根据一示例性实施例示出的一种旋转后的四分量横波数据的示意图;
61.图4是根据一示例性实施例示出的一种快横波剖面和慢横波剖面的示意图;
62.图5是根据一示例性实施例示出的一种sh横波波场和sv横波波场的示意图;
63.图6是根据一示例性实施例示出的一种纯横波的横波分裂校正装置的框图;
64.图7是根据一示例性实施例示出的一种纯横波的横波分裂校正装置的框图;
65.图8是根据一示例性实施例示出的一种计算机设备的结构框图。
具体实施方式
66.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
67.图1是根据一示例性实施例示出的一种纯横波的分裂校正方法的流程图。
68.参见图1,该方法包括:
69.101、计算机设备获取待测的工区的地层的裂缝方向信息,以及,获取工区内的目标检波器接收的第一纯横波数据。
70.在本技术实施例中,地层的裂缝方向信息已经获得。可选的,该裂缝方向信息是通过alford旋转等纯横波分裂分析方法确定的。
71.在一种可能的实现方式中,裂缝的方向随深度可以是固定的,地层不同深度的裂缝方向相同。此时,计算机设备可以通过步骤102至步骤104进行纯横波的横波分裂校正。
72.在另一种可能的实现方式中,地层不同深度的裂缝方向不同,裂缝方向随深度变化而变化。此时,计算机设备可以通过步骤105至步骤106进行纯横波的横波分裂校正。
73.需要说明的一点是,待测工区内布设有多个震源和多个检波器。目标检波器为接收目标震源激发的第一纯横波数据的检波器。其中,目标震源可以是多个震源中的任一个。可选的,目标震源为水平方向激发的可控震源,目标震源激发的地震波信号为以横波为主的纯横波,分别沿平行测线方向和垂直测线方向各激发一次。也即,目标检波器接收两次纯横波。相应的,第一纯横波数据包括第一纯横波和第二纯横波,其中,第一纯横波为目标检波器接收的目标震源沿平行测线方向激发的纯横波,第二纯横波为目标震源沿垂直测线方向激发的纯横波。
74.在一种可能的实现方式中,目标检波器为三分量检波器,三分量检波器在水平方向有两个分量,分别为x分量和y分量,其中,x分量和y分量相互垂直。在垂直方向有一个分量,为z分量,其中,z分量与x分量和y分量均垂直。
75.其中,三分量检波器的两个水平分量分别平行于测线方向和垂直于测线方向,从而接收到第一纯横波平行于测线方向的分量波以及垂直于测线方向的分量波和第二纯横波平行于测线方向的分量波以及垂直于测线方向的分量波,也即,第一纯横波数据对应的初始四分量数据。
76.102、当裂缝方向信息用于表示裂缝方向随深度为固定方向时,计算机设备根据裂缝方向信息,确定第一纯横波数据对应的快横波和慢横波,快横波为平行于裂缝方向的横波,慢横波为垂直于裂缝方向的横波。
77.在一种可能的实现方式中,本步骤为可以包括以下步骤(1)至(3):
78.(1)计算机设备获取目标震源和目标检波器之间的炮检连线方向,确定裂缝方向与炮检连线方向之间的第一角度差。
79.目标震源为工区内激发第一纯横波数据的震源;目标检波器为接收目标震源激发的第一纯横波数据的检波器。其中,裂缝方向可以用字母θ
fracture
表示;炮检连线方向可以用字母θ
azimuth
表示;裂缝方向与炮检连线方向之间的第一角度差为:θ
fracture-θ
azimuth
。可选的,第一角度差可以用字母γ表示;也即,γ=θ
fracture-θ
azimuth
。
80.在本步骤中,炮检连线方向即震源位置指向检波器位置的方向。可选的,炮检连线方向可以称为径向(radial,径向)方向,一般用字母r表示;炮检连线的垂直方向可以称为切向(transverse,切向)方向,一般用字母t表示。
81.(2)计算机设备确定第一目标纯横波和第二目标纯横波。
82.在一种可能的实现方式中,第一纯横波数据包括第一纯横波和第二纯横波;相应的,计算机设备确定第一目标纯横波和第二目标纯横波的步骤可以包括以下步骤(21)至步骤(23):
83.(21)计算机设备获取工区内多个检波器的测线方向,确定炮检连线方向与测线方向之间的第二角度差。
84.其中,测线方向可以用字母θ
inline
表示,炮检连线方向与测线方向之间的第二角度差为:θ
azimuth-θ
inline
。可选的,第二角度差可以用字母β表示;也即,β=θ
azimuth-θ
inline
。
85.(22)计算机设备确定第一纯横波对应的第一分量波和第二分量波,以及第二纯横波对应的第三分量波和第四分量波。
86.需要说明的一点是,目标检波器为三分量检波器,三分量检波器在水平方向有两个分量,分别为x分量和y分量,其中,x分量和y分量相互垂直。在垂直方向有一个分量,为z分量,其中,z分量与x分量和y分量均垂直。
87.在一种可能的实现方式中,x分量平行于测线方向,y分量垂直于测线方向。目标震源分别沿测线方向和测线方向的垂直方向各激发一次纯横波。其中,第一分量波为目标检波器沿测线方向接收的第一纯横波的分量波,第二分量波为目标检波器沿测线方向的垂直方向接收的第一纯横波的分量波。第三分量波为目标检波器沿测线方向接收的第二纯横波的分量波,第四分量波为目标检波器沿测线方向的垂直方向接收的第二纯横波的分量波。
88.在一种可能的实现方式中,第一分量波可以用s
xrx
表示,第二分量波可以用s
xry
表示。第三分量波可以用s
yrx
表示,第四分量波可以用s
yry
表示。可选的,参见图2,第一纯横波数据对应的初始四分量数据包括第一分量波、第二分量波、第三分量波和第四分量波。
89.(23)计算机设备根据第二角度差、第一分量波、第二分量波、第三分量波和第四分量波,确定第一目标纯横波和第二目标纯横波。
90.在一种可能的实现方式中,第一目标纯横波包括第一径向纯横波和第一切向纯横波;第二目标纯横波包括第二径向纯横波和第二切向纯横波;计算机设备根据炮检连线方向与测线方向之间的第二角度差,对纯横波初始四分量数据进行四分量旋转,得到旋转后的四分量横波数据。相应的,本步骤为:计算机设备根据第二角度差、第一分量波、第二分量波、第三分量波和第四分量波,通过以下公式一,确定第一径向纯横波、第一切向纯横波、第二径向纯横波和第二切向纯横波;
91.公式一:
92.其中,s
xrx
表示第一分量波,s
xry
表示第二分量波,s
yrx
表示第三分量波,s
yry
表示第四分量波,β表示第二角度差,s
trr
表示第一径向纯横波,s
trt
表示第一切向纯横波,s
trr
表示第二径向纯横波,s
trt
表示第二切向纯横波。
93.可选的,参见图3,旋转后的四分量横波数据包括第一径向纯横波s
trr
、第一切向纯横波为s
trt
、第二径向纯横波srrr和第二切向纯横波srr
t
。
94.(3)计算机设备根据第一角度差,对第一目标纯横波和第二目标纯横波进行二分量旋转,得到第一纯横波数据对应的快横波和慢横波。
95.第一目标纯横波包括第一径向纯横波和第一切向纯横波;第二目标纯横波包括第二径向纯横波和第二切向纯横波。相应的,本步骤包括:计算机设备对第一径向纯横波和第一切向纯横波进行二分量旋转,得到第一目标纯横波对应的第一快横波和第一慢横波;以及,计算机设备对第二径向纯横波和第二切向纯横波进行二分量旋转,得到第二目标纯横波对应的第二快横波和第二慢横波。
96.在一种可能的实现方式中,通过将检波器的接收方向旋转至平行于裂缝方向和垂直于裂缝方向,实现对第一径向纯横波和第一切向纯横波进行二分量旋转。相应的,计算机设备对第一径向纯横波和第一切向纯横波进行二分量旋转的步骤为:计算机设备根据第一角度差,通过以下公式二,对第一径向纯横波和第一切向纯横波进行二分量旋转,得到第一目标纯横波对应的第一快横波和第一慢横波;
97.公式二:
98.其中,s
trs1
表示第一快横波,s
trs2
表示第一慢横波,s
trr
表示第一径向纯横波,s
trt
表示第一切向纯横波,γ表示第一角度差。
99.计算机设备对第二径向纯横波和第二切向纯横波进行二分量旋转的步骤为:计算机设备根据第一角度差,通过以下公式三,对第二径向纯横波和第二切向纯横波进行二分量旋转,得到第二目标纯横波对应的第二快横波和第二慢横波;
100.公式三:
101.其中,srr
s1
表示第二快横波,srr
s2
表示第二慢横波,srrr表示第二径向纯横波,srr
t
表示第二切向纯横波,γ表示第一角度差。
102.103、计算机设备确定快横波和慢横波的时间差,根据时间差,对慢横波进行校正,得到校正慢横波。
103.在一种可能的实现方式中,计算机设备确定快横波和慢横波的时间差可以通过以下步骤(1)至(2)实现:
104.(1)计算机设备确定快横波对应的快横波剖面和慢横波对应的慢横波剖面,快横波剖面包括快横波在预设时间段内对应的多个第一层位波的层位标识和层位时间,慢横波剖面包括慢横波在预设时间段内对应的多个第二层位波的层位标识和层位时间。
105.在一种可能的实现方式中,第一纯横波数据包括第一纯横波和第二纯横波。相应
的,本步骤为:计算机设备获取工区测线方向,确定裂缝方向与测线方向之间的第三角度差;确定第一纯横波对应的第一分量波和第二分量波,以及第二纯横波对应的第三分量波和第四分量波,第一分量波为第一纯横波沿测线方向的分量波,第二分量波为第一纯横波沿测线方向的垂直方向的分量波,第三分量波为第二纯横波沿测线方向的分量波,第四分量波沿为第二纯横波沿测线方向的垂直方向的分量波;根据第三角度差、第一分量波、第二分量波、第三分量波和第四分量波,确定快横波对应的快横波剖面和慢横波对应的慢横波剖面。
106.在一种可能的实现方式中,第一分量波、第二分量波、第三分量波和第四分量波为第一纯横波数据对应的初始四分量数据,计算机设备通过旋转公式对四分量数据进行快慢波分离。相应的,计算机设备根据第三角度差、第一分量波、第二分量波、第三分量波和第四分量波,确定快横波对应的快横波剖面和慢横波对应的慢横波剖面的步骤为:计算机设备根据第三角度差、第一分量波、第二分量波、第三分量波和第四分量波,通过以下公式四,确定快横波对应的快横波剖面和慢横波对应的慢横波剖面;
107.公式四:
108.其中,s
xrx
表示第一分量波,s
xry
表示第二分量波,s
yrx
表示第三分量波,s
yry
表示第四分量波,表示第三角度差,s
s1rs1
表示快横波剖面,s
s2rs2
表示慢横波剖面。
109.其中,裂缝方向可以用字母θ
fracture
表示,测线方向可以用字母θ
inline
表示,裂缝方向与测线方向之间的第三角度差为:θ
fracture-θ
inline
。可选的,第三角度差可以用字母表示;也即,
110.需要说明的一点是,快横波剖面对应的是快横波的剖面信息,慢横波剖面对应的是慢横波的剖面信息。可选的,参见图4,计算机设备通过旋转公式对横波初始四分量数据进行快慢波分离,得到的快横波的剖面信息和慢横波的剖面信息如图4所示,其中,快横波剖面为图4中最左侧的横波剖面,慢横波剖面为图4中最右侧的横波剖面。
111.(2)计算机设备根据快横波剖面的多个第一层位波对应的层位标识和层位时间以及慢横波剖面的多个第二层位波对应的层位标识和层位时间,确定每个第一层位波与该第一层位波对应的第二层位波之间的时间差,得到快横波和慢横波的时间差。
112.其中,快横波剖面的多个第一层位波的层位标识与慢横波剖面的多个第二层位波的层位标识从浅到深一一对应。例如,快横波剖面的多个第一层位波的层位标识为h1s1、h2s1、h3s1,慢横波剖面的多个第二层位波的层位标识为h1s2、h2s2、h3s2;其中,h1s1、h2s1、h3s1与h1s2、h2s2、h3s2从浅到深一一对应,也即,h1s1对应h1s2,h2s1对应h2s2,h3s1对应h3s2。
113.在一种可能的实现方式中,本步骤为:计算机设备按照从浅到深的顺序,根据快横波剖面的第一个第一层位波的层位时间以及慢横波剖面的第一个第二层位波的层位时间,确定第一个第一层位波与第一个第二层位波的之间的时间差,根据快横波剖面的第二个第一层位波的层位时间以及慢横波剖面的第二个第二层位波的层位时间,确定第二个第一层位波与第二个第二层位波的之间的时间差,从浅到深的依次确定每个第一层位波与该第一层位波对应的第二层位波之间的时间差,得到快横波和慢横波的时间差。
114.在步骤103中,计算机设备根据时间差,对慢横波进行校正,得到校正慢横波的步
骤为:计算机设备根据时间差,通过以下公式五,对第一目标纯横波对应的第一慢横波进行校正,得到第一校正慢横波;以及,根据时间差,通过以下公式六,对第二目标纯横波对应的第二慢横波进行校正,得到第二校正慢横波;
115.公式五:s
trs2up
(t)=s
trs2
(t+δt)
116.公式六:srr
s2up
(t)=srr
s2
(t+δt)
117.其中,s
trs2up
(t)表示t时刻对应的第一校正慢横波,srr
s2up
(t)表示t时刻对应的第二校正慢横波,δt表示时间差,s
trs2
(t+δt)表示t+δt时刻对应的第一慢横波,srr
s2
(t+δt)表示t+δt时刻对应的第二慢横波。可选的,t可以表示一个时间点,也可以表示一个时间段。
118.需要说明的一点是,该时间差可随深度变化,也就是说,不同层位对应的快慢波时差可以不同,此时,对于两个层位之间的纯横波,其快慢波时差时间取上个层位时差与下个层位时差的插值结果。
119.需要说明的另一点是,慢横波剖面为慢横波对应的振幅值,其中,振幅值为基于目标检波器周期性采集的第一纯横波数据得到的。在一种可能的实现方式中,在对慢波进行时差校正的过程中,当t+δt没有对应的振幅值时,计算机设备根据sinc函数插值,确定t+δt对应的振幅值。
120.在本技术实施例中,当慢横波时差校正后的时间没有对应的振幅值时,计算机设备能够通过sinc函数插值,确定该时间对应的振幅值,从而提高了时差校正的精确性。
121.104、计算机设备根据裂缝方向信息、快横波和校正慢横波,确定第一纯横波数据对应的第一校正横波波场。
122.在一种可能的实现方式中,第一校正横波波场包括sh横波波场和sv横波波场。相应的,本步骤为:计算机设备对于工区内的任一目标震源,获取目标震源和目标检波器之间的炮检连线方向,确定裂缝方向与炮检连线方向之间的第一角度差,目标震源为所述工区内激发所述第一纯横波数据的震源;根据第一角度差,对快横波和校正慢横波进行反旋转,得到第一纯横波数据对应的sh横波波场和第一纯横波数据对应的sv横波波场。
123.在一种可能的实现方式中,快横波包括第一目标纯横波对应的第一快横波和第二目标纯横波对应的第二快横波;校正慢横波包括第一目标纯横波对应的第一校正慢横波和第二目标纯横波对应的第二校正慢横波。相应的,计算机设备根据第一角度差,对快横波和校正慢横波进行反旋转,得到第一纯横波数据对应的sh横波波场和第一纯横波数据对应的sv横波波场的步骤为:计算机设备根据第一角度差,通过以下公式七,对第一目标纯横波对应的第一快横波和第一校正慢横波进行反旋转,得到第一纯横波数据对应的sh横波波场;以及,根据第一角度差,通过以下公式八,对第二目标纯横波对应的第二快横波和第二校正慢横波进行反旋转,得到第一纯横波数据对应的sv横波波场;
124.公式七:
125.公式八:
126.其中,s
trs1
表示第一快横波,s
trs2up
表示第一校正慢横波,srr
s1
表示第二快横波,srr
s2up
表示第二校正慢横波,s
trt’表示第一纯横波数据对应的sh横波波场,srr
r’表示第一
纯横波数据对应的sv横波波场。
127.需要说明的一点是,s
trr’和s
trt’为第一目标纯横波横波分裂校正后横波波场,srr
r’和srr
t’表示第二目标纯横波横波分裂校正后横波波场。其中,s
trt’为校正后的sh波场,s
trr’有效能量将变为0,也即,s
trt’为消除了各向异性的sh横波波场。其中,srr
r’为校正后的sv波场,srr
t’有效能量将变为0,也即是,srr
r’为消除了各向异性的sv横波波场。
128.在一种可能的实现方式中,参见图5,横波分裂校正后的sv波见图5左侧的横波波场,也即srr
r’;横波分裂校正后的sh波见图5右侧的横波波场,也即srr
t’,图5中间的两个横波波场分别为srr
t’和s
trr’,表示能量已经变为0。
129.需要说明的一点是,继续参见图1,当裂缝方向信息用于表示裂缝方向随深度变化时,计算机设备执行完步骤101,直接执行步骤105至步骤107,而不再执行步骤102至步骤104。
130.105、当裂缝方向信息用于表示裂缝方向随深度变化时,计算机设备确定裂缝方向信息对应的多个裂缝时窗。
131.在一种可能的实现方式中,当裂缝方向随深度变化时,裂缝在不同深度对应的裂缝方向不同,相应的,计算机设备确定裂缝方向信息对应的多个裂缝时窗的步骤为:计算机设备确定裂缝在不同深度下对应的多个裂缝方向,根据多个裂缝方向确定多个裂缝时窗,其中,一个裂缝方向对应一个裂缝时窗。
132.106、计算机设备获取多个裂缝时窗对应的第二纯横波数据以及每个裂缝时窗对应的目标时间差和目标裂缝方向。
133.对于每个裂缝时窗,目标时间差为第二纯横波数据经过该裂缝时窗时,分裂出的快横波与慢横波之间的时间差。目标裂缝方向为该裂缝时窗下的裂缝方向。
134.在本技术实施例中,目标时间差与裂缝方向可以工作人员通过横波分裂分析得到。相应的,本步骤为:工作人员将目标时间差与裂缝方向上传至计算机设备,计算机设备获取多个裂缝时窗对应的第二纯横波数据以及每个裂缝时窗对应的目标时间差和目标裂缝方向。
135.107、计算机设备根据每个裂缝时窗对应的目标时间差和目标裂缝方向,对第二纯横波数据进行横波分裂校正,得到第二纯横波数据对应的第二校正横波波场。
136.在一种可能的实现方式中,第二纯横波数据包括第三纯横波和第四纯横波;第二校正横波波场包括平行于炮检连线方向的sv波场和垂直于炮检连线方向的sh波场。相应的,本步骤为:计算机设备根据每个裂缝时窗对应的目标时间差和目标裂缝方向,通过以下公式九,对第三纯横波进行横波分裂校正,得到第二纯横波数据平行于炮检连线方向的sv波场,以及,根据每个裂缝时窗对应的目标时间差和目标裂缝方向,通过以下公式十,对第四纯横波进行横波分裂校正,得到第二纯横波数据垂直于炮检连线方向的sh波场;
137.公式九:
138.u
0sr
(ω)=r
1-1
d1…rn-1-1dn-1rn-1dnrndn-1rn-1
…
d1r1u
sr
(ω)
139.公式十:
140.u
0st
(ω)=r
1-1
d1…rn-1-1dn-1rn-1dnrndn-1rn-1
…
d1r1u
st
(ω)
141.[0142][0143][0144][0145]
其中,n表示多个裂缝时窗的数量,u
sr
(ω)表示第三纯横波,u
st
(ω)表示第四纯横波,u
0sr
(ω)为横波分裂校正后的sv横波波场,u
0st
(ω)表示横波分裂校正后的sh横波波场,δtn表示第n个裂缝视窗对应的目标时间差,θn表示第n个裂缝时窗对应的目标裂缝方向,α表示炮检连线方向。
[0146]
可选的,u
0sr
(ω)为消除了各向异性的sv横波波场。u
0st
(ω)为消除了各向异性的sh横波波场。
[0147]
本技术实施例提供了一种纯横波的横波分裂校正方法,由于对于各向异性介质的地层,通过快横波和慢横波的时间差,对慢横波进行校正,消除了方位各向异性的影响,进而通过将快横波与校正慢横波进行反旋转,得到的横波波场的准确性高。
[0148]
图6是根据一示例性实施例示出的一种纯横波的横波分裂校正装置的框图。参见图6,该装置包括:
[0149]
获取模块601,用于获取待测的工区的地层的裂缝方向信息,以及,获取工区内的目标检波器接收的第一纯横波数据;
[0150]
第一确定模块602,用于当裂缝方向信息用于表示裂缝方向为固定方向时,根据裂缝方向信息,确定第一纯横波数据对应的快横波和慢横波,快横波为平行于裂缝方向的横波,慢横波为垂直于裂缝方向的横波;
[0151]
第二确定模块603,用于确定快横波和慢横波的时间差,根据时间差,对慢横波进行校正,得到校正慢横波;
[0152]
第三确定模块604,用于根据裂缝方向信息、快横波和校正慢横波,确定第一纯横波数据对应的第一校正横波波场。
[0153]
在一种可能的实现方式中,参见图7,第一确定模块602,包括:
[0154]
获取单元6021,用于获取目标震源和目标检波器之间的炮检连线方向,确定裂缝方向与炮检连线方向之间的第一角度差,目标震源为工区内激发第一纯横波数据的震源;
[0155]
第一确定单元6022,用于确定第一目标纯横波和第二目标纯横波;
[0156]
旋转单元6023,用于根据第一角度差,对第一目标纯横波和第二目标纯横波进行二分量旋转,得到第一纯横波数据对应的快横波和慢横波。
[0157]
在另一种可能的实现方式中,第一纯横波数据包括第一纯横波和第二纯横波;
[0158]
第一确定单元6021,用于获取工区内多个检波器的测线方向,确定炮检连线方向与测线方向之间的第二角度差;确定第一纯横波对应的第一分量波和第二分量波,以及第二纯横波对应的第三分量波和第四分量波,第一分量波为第一纯横波沿测线方向的分量波,第二分量波为第一纯横波沿测线方向的垂直方向的分量波,第三分量波为第二纯横波沿测线方向的分量波,第四分量波沿为第二纯横波沿测线方向的垂直方向的分量波;根据第二角度差、第一分量波、第二分量波、第三分量波和第四分量波,确定第一目标纯横波和
第二目标纯横波。
[0159]
在另一种可能的实现方式中,继续参见图7,第二确定模块603,包括:
[0160]
第二确定单元6031,用于确定快横波对应的快横波剖面和慢横波对应的慢横波剖面,快横波剖面包括多个第一层位波的层位标识和层位时间,慢横波剖面包括多个第二层位波的层位标识和层位时间;
[0161]
第三确定单元6032,用于根据多个第一层位波对应的层位标识和层位时间以及多个第二层位波对应的层位标识和层位时间,确定每个第一层位波与第一层位波对应的第二层位波之间的时间差,得到快横波和慢横波的时间差;
[0162]
其中,第一层位波对应的第二层位波的深度与第一层位波的深度为同一深度。
[0163]
在另一种可能的实现方式中,第一纯横波数据包括第一纯横波和第二纯横波;
[0164]
第二确定单元6031,用于获取工区内多个检波器的测线方向,确定裂缝方向与测线方向之间的第三角度差;确定第一纯横波对应的第一分量波和第二分量波,以及第二纯横波对应的第三分量波和第四分量波,第一分量波为第一纯横波沿测线方向的分量波,第二分量波为第一纯横波沿测线方向的垂直方向的分量波,第三分量波为第二纯横波沿测线方向的分量波,第四分量波沿为第二纯横波沿测线方向的垂直方向的分量波;根据第三角度差、第一分量波、第二分量波、第三分量波和第四分量波,确定快横波对应的快横波剖面和慢横波对应的慢横波剖面。
[0165]
在一种可能的实现方式中,第一校正横波波场包括sh横波波场和sv横波波场;第三确定模块604,用于对于工区内的任一目标震源,获取目标震源和目标检波器之间的炮检连线方向,确定裂缝方向与炮检连线方向之间的第一角度差,目标震源为工区内激发第一纯横波数据的震源;根据第一角度差,对快横波和校正慢横波进行反旋转,得到第一纯横波数据对应的sh横波波场和第一纯横波数据对应的sv横波波场。
[0166]
在一种可能的实现方式中,继续参见图7,该装置还包括:
[0167]
第四确定模块605,用于当裂缝方向信息用于表示裂缝方向随深度变化时,确定裂缝方向信息对应的多个裂缝时窗;获取多个裂缝时窗对应的第二纯横波数据以及每个裂缝时窗对应的目标时间差和目标裂缝方向;根据每个裂缝时窗对应的目标时间差和目标裂缝方向,对第二纯横波数据进行横波分裂校正,得到第二纯横波数据对应的第二校正横波波场。
[0168]
本技术实施例提供了一种纯横波的横波分裂校正装置,由于对于各向异性介质的地层,通过快横波和慢横波的时间差,对慢横波进行校正,消除了方位各向异性的影响,进而通过将快横波与校正慢横波进行反旋转,得到的横波波场的准确性高。
[0169]
图8示出了本发明一个示例性实施例提供的终端800的结构框图。该终端800可以是:智能手机、平板电脑、mp3播放器(moving picture experts group audio layer iii,动态影像专家压缩标准音频层面3)、mp4(moving picture experts group audio layer iv,动态影像专家压缩标准音频层面4)播放器、笔记本电脑或台式电脑。终端800还可能被称为用户设备、便携式终端、膝上型终端、台式终端等其他名称。
[0170]
通常,终端800包括有:处理器801和存储器802。
[0171]
处理器801可以包括一个或多个处理核心,比如4核心处理器、8核心处理器等。处理器801可以采用dsp(digital signal processing,数字信号处理)、fpga(field-
crystal display,液晶显示屏)、oled(organic light-emitting diode,有机发光二极管)等材质制备。
[0177]
摄像头组件806用于采集图像或视频。可选地,摄像头组件806包括前置摄像头和后置摄像头。通常,前置摄像头设置在终端的前面板,后置摄像头设置在终端的背面。在一些实施例中,后置摄像头为至少两个,分别为主摄像头、景深摄像头、广角摄像头、长焦摄像头中的任意一种,以实现主摄像头和景深摄像头融合实现背景虚化功能、主摄像头和广角摄像头融合实现全景拍摄以及vr(virtual reality,虚拟现实)拍摄功能或者其它融合拍摄功能。在一些实施例中,摄像头组件806还可以包括闪光灯。闪光灯可以是单色温闪光灯,也可以是双色温闪光灯。双色温闪光灯是指暖光闪光灯和冷光闪光灯的组合,可以用于不同色温下的光线补偿。
[0178]
音频电路807可以包括麦克风和扬声器。麦克风用于采集用户及环境的声波,并将声波转换为电信号输入至处理器801进行处理,或者输入至射频电路804以实现语音通信。出于立体声采集或降噪的目的,麦克风可以为多个,分别设置在终端800的不同部位。麦克风还可以是阵列麦克风或全向采集型麦克风。扬声器则用于将来自处理器801或射频电路804的电信号转换为声波。扬声器可以是传统的薄膜扬声器,也可以是压电陶瓷扬声器。当扬声器是压电陶瓷扬声器时,不仅可以将电信号转换为人类可听见的声波,也可以将电信号转换为人类听不见的声波以进行测距等用途。在一些实施例中,音频电路807还可以包括耳机插孔。
[0179]
定位组件808用于定位终端800的当前地理位置,以实现导航或lbs(location based service,基于位置的服务)。定位组件808可以是基于美国的gps(global positioning system,全球定位系统)、中国的北斗系统、俄罗斯的格雷纳斯系统或欧盟的伽利略系统的定位组件。
[0180]
电源809用于为终端800中的各个组件进行供电。电源809可以是交流电、直流电、一次性电池或可充电电池。当电源809包括可充电电池时,该可充电电池可以支持有线充电或无线充电。该可充电电池还可以用于支持快充技术。
[0181]
在一些实施例中,终端800还包括有一个或多个传感器810。该一个或多个传感器810包括但不限于:加速度传感器811、陀螺仪传感器812、压力传感器813、指纹传感器814、光学传感器815以及接近传感器816。
[0182]
加速度传感器811可以检测以终端800建立的坐标系的三个坐标轴上的加速度大小。比如,加速度传感器811可以用于检测重力加速度在三个坐标轴上的分量。处理器801可以根据加速度传感器811采集的重力加速度信号,控制显示屏805以横向视图或纵向视图进行用户界面的显示。加速度传感器811还可以用于游戏或者用户的运动数据的采集。
[0183]
陀螺仪传感器812可以检测终端800的机体方向及转动角度,陀螺仪传感器812可以与加速度传感器811协同采集用户对终端800的3d动作。处理器801根据陀螺仪传感器812采集的数据,可以实现如下功能:动作感应(比如根据用户的倾斜操作来改变ui)、拍摄时的图像稳定、游戏控制以及惯性导航。
[0184]
压力传感器813可以设置在终端800的侧边框和/或显示屏805的下层。当压力传感器813设置在终端800的侧边框时,可以检测用户对终端800的握持信号,由处理器801根据压力传感器813采集的握持信号进行左右手识别或快捷操作。当压力传感器813设置在显示
屏805的下层时,由处理器801根据用户对显示屏805的压力操作,实现对ui界面上的可操作性控件进行控制。可操作性控件包括按钮控件、滚动条控件、图标控件、菜单控件中的至少一种。
[0185]
指纹传感器814用于采集用户的指纹,由处理器801根据指纹传感器814采集到的指纹识别用户的身份,或者,由指纹传感器814根据采集到的指纹识别用户的身份。在识别出用户的身份为可信身份时,由处理器801授权该用户执行相关的敏感操作,该敏感操作包括解锁屏幕、查看加密信息、下载软件、支付及更改设置等。指纹传感器814可以被设置终端800的正面、背面或侧面。当终端800上设置有物理按键或厂商logo时,指纹传感器814可以与物理按键或厂商logo集成在一起。
[0186]
光学传感器815用于采集环境光强度。在一个实施例中,处理器801可以根据光学传感器815采集的环境光强度,控制显示屏805的显示亮度。具体地,当环境光强度较高时,调高显示屏805的显示亮度;当环境光强度较低时,调低显示屏805的显示亮度。在另一个实施例中,处理器801还可以根据光学传感器815采集的环境光强度,动态调整摄像头组件806的拍摄参数。
[0187]
接近传感器816,也称距离传感器,通常设置在终端800的前面板。接近传感器816用于采集用户与终端800的正面之间的距离。在一个实施例中,当接近传感器816检测到用户与终端800的正面之间的距离逐渐变小时,由处理器801控制显示屏805从亮屏状态切换为息屏状态;当接近传感器816检测到用户与终端800的正面之间的距离逐渐变大时,由处理器801控制显示屏805从息屏状态切换为亮屏状态。
[0188]
本领域技术人员可以理解,图8中示出的结构并不构成对终端800的限定,可以包括比图示更多或更少的组件,或者组合某些组件,或者采用不同的组件布置。
[0189]
在示例性实施例中,还提供了一种包括程序代码的存储介质,例如包括程序代码的存储器804,上述程序代码可由装置800的处理器820执行以完成上述方法。可选地,存储介质可以是非临时性计算机可读存储介质,例如,所述非临时性计算机可读存储介质可以是rom(read-only memory,只读存储器)、ram(random access memory,随机存取存储器)、cd-rom(compact disc read-only memory,只读光盘)、磁带、软盘和光数据存储设备等。
[0190]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利要求指出。
[0191]
以上所述仅为本技术的可选实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1