一种卷帘曝光星敏感器的高动态快速自主捕获方法与流程
1.本发明涉及一种卷帘曝光星敏感器的高动态快速自主捕获方法,适用于卷帘式曝光星敏感器的星点位置修正,属于卫星姿态控制技术领域。
背景技术:
2.星敏感器为目前卫星上测量精度最高的姿态测量光学敏感器,其无需先验的姿态和角速度信息,进行全天球自主姿态捕获和确定。具有精度高、无漂移、可靠性高等优点,是卫星姿态测量的关键部件。近年来,随着卫星应用领域的不断拓展,对星敏感器姿态测量精度及动态性能的要求越来越高。
3.为了实现优于5
°
/s、10
°
/s等更高动态性能,星敏感器需选用高灵敏度成像探测器,目前可用高灵敏度探测器均为卷帘曝光成像方式,同一帧星图中星点成像在不同时刻,受角速度影响星点成像位置相较于实际位置会产生误差。在小动态条件下,该误差量较小,可通过设置较大星点匹配误差实现自主匹配识别;但在高动态条件下,卷帘曝光会导致星点位置误差达到几十个像元,星点无法通过匹配识别,输出有效姿态数据。为使星敏感器满足高动态的性能需求,需根据角速度对星点进行卷帘修正。
4.星敏感器有初始姿态捕获和跟踪模式2种工作模式,其中初始姿态捕获就是在全天球范围内对成像器件所得到的观测星图进行匹配、识别,计算初始姿态;跟踪模式是根据初始姿态信息估计当前图像对应姿态信息,预测当前时刻星图中星点的位置,然后寻找观测星图中对应预测星点位置区域是否存在真实星点,再进行局部星点提取与星图识别,提升星点提取与星图识别速度。
5.星敏感器通常工作在窗口跟踪模式,在此模式下可以根据相邻两帧姿态信息计算星敏感器角速度,完成卷帘修正。但产品初始化后工作在全天自主捕获模式,由于没有姿态先验信息,无法按照跟踪模式的方法求解星敏感器角速度,对星点坐标进行修正。因此,研究一种在全天自主捕获模式计算星敏感器角速度,能够适用于卷帘曝光星敏感器高动态条件,从而完成星点坐标修正及全天星图识别,是高动态卷帘曝光星敏感器亟需解决的核心问题。
技术实现要素:
6.本发明解决的技术问题是:克服现有技术的不足,提出一种卷帘曝光星敏感器的高动态快速自主捕获方法,解决星敏感器工作在高动态下难以实现自主全天捕获的问题。
7.本发明解决技术的方案是:
8.一种卷帘曝光星敏感器的高动态快速自主捕获方法,该方法的步骤包括:
9.(1)选取两帧星图,其中第一帧星图的观测时刻为t1,第二帧星图的观测时刻为t2,t2
‑
t1<设置时间差阈值;
10.(2)在每帧星图中,计算星点两两之间行坐标之差、列坐标之差及距离;
11.(3)根据设定的行坐标之差误差阈值、列坐标之差误差阈值及距离误差阈值,从t2
时刻星图中选择三个星点构成星点三角形,在t1时刻星图中选取与该星点三角形相匹配的星点三角形;
12.(4)以匹配成功的星点三角形在两帧星图中的星点为基准,对剩余星点进行匹配确认;
13.(5)判断匹配星数是否大于3,若是,则选取两帧星图中匹配确认成功的所有星点,利用相同星点位置坐标计算角速度平均值,进入步骤(7);否则,判断是否已遍历t2时刻星图中的所有星点三角形,若没有,则进入步骤(6),若已经遍历t2时刻星图中的所有星点三角形,则结束,匹配星数清零,并记录t2时刻星图时间及星点信息,用于下一次自主捕获使用;
14.(6)继续在t1时刻星图和t2时刻星图中寻找相匹配的星点三角形,并重复步骤(4)
‑
(5);
15.(7)利用角速度平均值对当前帧所有星点位置进行卷帘修正,进入步骤(8);
16.(8)利用修正后星点坐标进行全天自主星图识别及姿态计算,实现快速自主捕获。
17.所述步骤(3)的实现方式如下:
18.(3.1)从t2时刻星图中选取三颗星点a、b、c组成星点三角形abc,记星点a的坐标为(u2
a
,v2
a
),星点b的坐标为(u2
b
,v2
b
),星点c的坐标为(u2
c
,v2
c
),星点a和星点b的距离为dist2
ab
,星点b和星点c的距离为dist2
bc
,星点a和星点c的距离为dist3
ac
;
19.(3.2)取星点三角形的第一条边ab,从t1时刻星图中任选一组观测星对,设该观测星对包括星点m和星点n,星点m的坐标为(u1
m
,v1
m
),星点n的坐标为(u1
n
,v1
n
),距离星点m和n的距离为dist1
mn
,若满足如下条件:
20.dist1
mn
‑
dist2
ab
≤thr_dist
21.||u1
m
‑
u1
n
|
‑
|u2
a
‑
u2
b
||≤thr_u
22.||v1
m
‑
v1
n
|
‑
|v2
a
‑
v2
b
||≤thr_v
23.则将该组观测星对m、n加入到匹配队列1中;
24.其中,thr_dist、thr_u、thr_v分别为距离误差阈值、行坐标之差误差阈值、列坐标之差误差阈值;
25.(3.3)重复步骤(3.2),直到遍历t1时刻星图中所有观测星对,得到匹配队列1;
26.(3.4)取星点三角形的第二条边bc,参照步骤(3.2)和(3.3)的方法,得到匹配队列2;
27.取星点三角形的第三条边ac,参照步骤(3.2)和(3.3)的方法,得到匹配队列3;
28.(3.5)从三个匹配队列中搜索出所有与星点三角形abc匹配成功的星点三角形。
29.所述步骤(3.5)中,搜索方法如下:
30.从每个匹配队列中提取一组观测星对,若三个匹配队列中提取的三组观测星对仅包含三个星点,则该三个星点构成的星点三角形与星点三角形abc匹配成功。
31.所述步骤(3.2)中,所述步骤(3.2)中,
32.所述步骤(4)的实现方法如下:
33.(4.1)设t1时刻星图中的星点三角形def与t2时刻星图中的星点三角形abc相匹配,星点三角形abc的三个坐标分别为(u2
a
,v2
a
)、(u2
b
,v2
b
)、(u2
c
,v2
c
),星点三角形def的三个坐标分别为(u1
d
,v1
d
)、(u1
e
,v1
e
)、(u1
f
,v1
f
),据此计算相邻两帧星点行坐标变化量delta_u12和列坐标变化量delta_v12;
34.(4.2)利用计算的星点行坐标变化量、列左边变化量及t1时刻星点坐标,预报t1时刻第i个星点在t2时刻的理论位置(u3
i
,v3
i
);
35.(4.3)对t1时刻的第i个星点,计算其在t2时刻的理论位置与t2时刻nstar2颗星点的行坐标之差,选取行坐标之差的最小值min_deltau以及行坐标之差最小时对应的t2时刻星点序号idx_minu,计算t1时刻的第i个星点在t2时刻的理论位置与t2时刻nstar2颗星点的列坐标之差,选取列坐标之差的最小值min_deltav以及列坐标之差最小时对应的t2时刻星点序号idx_minv,
36.若满足如下条件:
37.idx_minu=idx_minv=j
38.min_deltau≤thr_u
39.min_deltav≤thr_v
40.j=1,2,
…
,nstar2,nstar2为t2时刻星图中的星点总数;
41.thr_u、thr_v分别为行坐标之差误差阈值、列坐标之差误差阈值;
42.则认为i和j是同一颗星,对应匹配星数nmatch=nmatch+1,nmatch初值为0;
43.(4.4)重复步骤(4.2)
‑
(4.3),遍历t1时刻星图中的所有星点。
44.所述步骤(4.1)中,
45.delta_u12=((u2
a
‑
u1
d
)+(u2
b
‑
u1
e
)+(u2
c
‑
u1
f
))/3
46.delta_v12=((v2
a
‑
v1
d
)+(v2
b
‑
v1
e
)+(v2
c
‑
v1
f
))/3。
47.所述步骤(4.2)中,
48.u3
i
=u1
i
+delta_u12
49.v3
i
=v1
i
+delta_v12。
50.所述步骤(5)中,利用t1时刻星图和t2时刻星图中相同星点的位置坐标计算角速度平均值的方法如下:
51.计算t1时刻星图和t2时刻星图中相同星点的行坐标变化量均值mean_deltau和列坐标变化量均值mean_deltav,根据产品瞬时视场ifov和两帧图像时间间隔deltat,利用如下公式计算角速度平均值:
52.ω
u
=mean_deltav*ifov/deltat
53.ω
v
=mean_deltau*ifov/deltat
54.ω
u
为角速度在星图行方向上的分量,ω
v
为角速度在星图列方向上的分量。
55.deltat=t2
‑
t1。
56.所述步骤(7)中,修正公式如下:
[0057][0058]
[0059]
式中,(u',v')为修正后观测星位置,(u,v)为修正前观测星位置,v0为曝光中心行坐标,ω
u
为角速度在星图行方向分量,ω
v
为角速度在星图列方向分量,t
d
为行曝光时间间隔,ifov为瞬时视场大小。
[0060]
本发明与现有技术相比的有益效果是:
[0061]
本发明提出了一种卷帘曝光星敏感器在全天捕获模式下角速度计算方法,利用未进行卷帘修正的不同帧星图中相同星点位置的变化规律,对不同帧相同星点进行匹配确认,利用不同帧星图中相同星点位置坐标计算角速度;将该角速度计算方法应用于捕获模式下卷帘修正,有效解决了卷帘曝光星敏感器高动态条件下全天自主捕获问题,提升了产品的动态性能,可适用于所有卷帘曝光星敏感器,具有很好的工程应用价值。
附图说明
[0062]
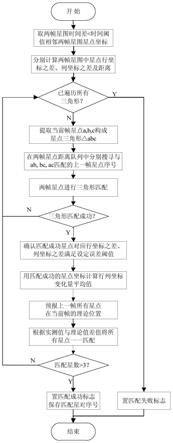
图1为星点匹配流程图;
[0063]
图2为角速度计算流程图。
具体实施方式
[0064]
下面结合附图对本发明作进一步阐述。
[0065]
本发明提出一种用于卷帘曝光星敏感器的高动态快速自主捕获方法,其中星敏感器采用卷帘曝光方式,以提升产品动态性能及更新率。
[0066]
如图1和图2所示,本发明提出的一种卷帘曝光星敏感器的高动态快速自主捕获方法的具体实施步骤如下:
[0067]
为了便于说明,记t1时刻星点坐标队列为uv_info1,对应星数为nstar1,t2时刻星点坐标队列为uv_info2,对应星数为nstar2,且t2>t1,则:
[0068]
1)若t2
‑
t1<thr_deltat,则选取t1时刻的星图和t2时刻的星图,顺序执行步骤2,否则执行步骤18);
[0069]
其中thr_deltat为设置时间差阈值,需根据产品视场大小、适用角速度进行设置,原则上需保证两帧星图中相同星点个数大于3。
[0070]
2)若两帧星图对应星点数nstar1及nstar2均大于设置星数阈值,则顺序执行下一步骤,否则执行步骤18);
[0071]
3)利用t1时刻星图星点坐标信息uv_info1,计算星点两两之间距离dist_ik、行坐标之差deltau_ik及列坐标之差deltav_ik;
[0072]
其中dist_ik为t1时刻星图中第i颗星点与第k颗星点距离,deltau_ik为t1时刻星图中第i颗星点与第k颗星点行坐标之差,deltav_ik为t1时刻星图中第i颗星点与第k颗星点列坐标之差,计算公式如下:
[0073][0074]
deltau_ik=u
i
‑
u
k
[0075]
deltav_ik=v
i
‑
v
k
[0076]
上述公式中u
i
、v
i
分别为第i颗星点行坐标、列坐标,u
k
、v
k
分别为第k颗星点行坐标、列坐标。
[0077]
4)利用与步骤3)同样方法,根据t2时刻星图星点坐标信息uv_info2,计算星点两两之间距离dist_ik、行坐标之差deltau_ik及列坐标之差deltav_ik;
[0078]
5)从t2时刻星点队列中选取三颗星点a、b、c组成星点三角形。为了穷尽所有可能,通过使用一个三重循环遍历各星点组成三角形。星点三角形在三重循环中的遍历顺序如下表所示:
[0079]
表1星点三角形遍历顺序
[0080][0081]
对每一组星点星号a、b、c,记星点坐标分别为(u2
a
,v2
a
)、(u2
b
,v2
b
)、
[0082]
(u2
c
,v2
c
),对应距离分别为dist2
ab
,dist2
bc
,dist3
ac
[0083]
6)取星点三角形的第一条边dist2
ab
,遍历步骤3中t1时刻星点距离队列。记t1时刻星点距离队列中取出的两颗星(m,n),对应星点坐标为(u1
m
,v1
m
)、(u1
n
,v1
n
),距离为dist1
mn
。若满足如下条件:
[0084]
dist1
mn
‑
dist2
ab
≤thr_dist
[0085]
||u1
m
‑
u1
n
|
‑
|u2
a
‑
u2
b
||≤thr_u
[0086]
||v1
m
‑
v1
n
|
‑
|v2
a
‑
v2
b
||≤thr_v
[0087]
则将(m,n)加入匹配队列1中。
[0088]
其中,thr_dist、thr_u、thr_v分别为距离误差阈值、行坐标之差误差阈值、列坐标之差误差阈值,各误差阈值需根据具体产品星点位置误差进行设置,默认值分别为5个像元、3个像元及3个像元。
[0089]
7)按步骤6遍历星点三角形的第二条边(b,c)和第三条边(a,c),将满足条件的观测星对分别加入匹配队列2和匹配队列3。
[0090]
8)按三角形匹配法,从三个匹配队列中搜索出所有匹配成功的星点三角形;
[0091]
9)若三角形匹配成功,对每个匹配成功的三角形均执行步骤10)~13),否则执行步骤18);
[0092]
10)记当t2时刻匹配成功三角形三颗星a、b、c星点坐标为(u2
a
,v2
a
)、(u2
b
,v2
b
)、(u2
c
,v2
c
),对应t1三颗星d、e、f的质心坐标为(u1
d
,v1
d
)、(u1
e
,v1
e
)、(u1
f
,v1
f
)。计算相邻两
帧星点坐标变化量,公式如下:
[0093]
delta_u12=((u2
a
‑
u1
d
)+(u2
b
‑
u1
e
)+(u2
c
‑
u1
f
))/3
[0094]
delta_v12=((v2
a
‑
v1
d
)+(v2
b
‑
v1
e
)+(v2
c
‑
v1
f
))/3
[0095]
11)利用计算的星点位置变化量及t1时刻星点坐标,预报t1时刻星点在t2时刻的理论位置(u3
i
,v3
i
)
[0096]
u3
i
=u1
i
+delta_u12
[0097]
v3
i
=v1
i
+delta_v12
[0098]
式中i=1,
…
,nstar1。
[0099]
12)对t1时刻的第i个星点,计算其在t2时刻的理论位置与t2时刻nstar2颗星点的行坐标之差,选取行坐标之差的最小值min_deltau以及行坐标之差最小时对应的t2时刻星点序号idx_minu,计算t1时刻的第i个星点在t2时刻的理论位置与t2时刻nstar2颗星点的列坐标之差,选取列坐标之差的最小值min_deltav以及列坐标之差最小时对应的t2时刻星点序号idx_minv,
[0100]
若满足如下条件:
[0101]
idx_minu=idx_minv=j
[0102]
min_deltau≤thr_u
[0103]
min_deltav≤thr_v
[0104]
j=1,2,
…
,nstar2,nstar2为t2时刻星图中的星点总数;
[0105]
thr_u、thr_v分别为行坐标之差误差阈值、列坐标之差误差阈值;
[0106]
则认为i和j是同一颗星,对应匹配星数nmatch=nmatch+1,nmatch初值为0;
[0107]
13)若匹配星数nmatch>3,置匹配成功标志为1,执行步骤15)
‑
17),否则顺序执行步骤14);
[0108]
14)判断是否遍历完所有星点三角形
△
abc,若遍历完,置匹配失败标志,匹配星数清零,执行步骤18);否则执行步骤5),选择下一个三角形
△
abc;
[0109]
15)若匹配成功标志等于1,计算所有匹配星点的行坐标变化量均值mean_deltau和列坐标变化量均值mean_deltav,根据产品瞬时视场ifov和两帧图像时间间隔deltat计算产品在行方向和列方向的角速度,否则执行步骤18),角速度计算公式如下:
[0110]
ω
u
=mean_deltav*ifov/deltat
[0111]
ω
v
=mean_deltau*ifov/deltat
[0112]
16)利用计算角速度对t2时刻星点坐标进行卷帘修正,修正公式如下所示:
[0113][0114][0115]
式中,(u',v')为修正后观测星位置,v0为曝光中心行坐标,ω
u
为角速度在星图行方向分量,ω
v
为角速度在星图列方向分量,t
d
为行曝光时间间隔,ifov为瞬时视场大小。
[0116]
17)使用修正后星点进行全天自主星图匹配识别及姿态计算;
[0117]
18)记录t2时刻星图时间及星点信息,用于下一次全天捕获模式角速度计算。
[0118]
本发明方法对全天捕获模式下不同帧星图中星点坐标进行匹配,利用不同帧星图
中相同星点位置坐标计算产品角速度,并根据该角速度对当前帧星点坐标进行卷帘修正,利用修正后星点坐标进行全天星图识别及姿态计算。该方法使得星敏感器在全天捕获模式下可求解角速度并进行卷帘修正,有效解决了卷帘曝光星敏感器高动态条件下全天自主捕获问题。
[0119]
本发明说明书中未详细描述的内容为本领域技术人员公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1