一种校正大视场光学畸变的激光雷达控制方法与流程
1.本发明涉及激光雷达技术领域,尤其涉及一种校正大视场光学畸变的激光雷达控制方法。
背景技术:
2.激光雷达(light detection and ranging,lidar)是一种主动发射激光束检测目标回波的三维成像系统,是达成l3级以上自动驾驶的核心器件。相比于毫米波雷达、摄像头、超声波雷达等,激光雷达具有的厘米级距离分辨率和测量准确性,支持高精度的障碍物识别、车道线检测、路沿检测等功能。近几年内,随着激光器、探测器、芯片等相关产业的大力发展,激光雷达逐渐摆脱饱受诟病的高成本问题,该方案在智能汽车上得到了更广泛的应用。
3.激光雷达的工作方式主要有飞行时间法(time of flight,tof),以及调频连续波法(frequency modulated continuous wave,fmcw)。基于技术成熟度、器件成本、产品功耗尺寸等综合考量,当前车载激光雷达公司几乎都采用直接飞行时间法(direct tof),即激光发射系统产生并发射激光脉冲,照射目标表面并散射,部分散射光由光学接收系统接收,采集并记录发射脉冲与接收脉冲的时间差,根据大气介质内的光速计算目标距离。该原理的结构简单易于实现,为目前激光雷达的主流方案。
4.然而,使用大面阵光电探测器接收大视场存在光学畸变问题,即成像光斑有位置偏移,通常在图像中心的偏移量较小,图像边缘的偏移量大。对于上述线扫面收激光雷达系统,当扫描角度较大时,扫描光斑和探测器靶面无法良好对准,会导致边缘角度的测距性能大大降低。
技术实现要素:
5.基于背景技术中提出的然而,使用大面阵光电探测器接收大视场存在光学畸变问题,即成像光斑有位置偏移,通常在图像中心的偏移量较小,图像边缘的偏移量大。对于上述线扫面收激光雷达系统,当扫描角度较大时,扫描光斑和探测器靶面无法良好对准,会导致边缘角度的测距性能大大降低的技术问题,本发明提出了一种校正大视场光学畸变的激光雷达控制方法。
6.本发明提出的一种校正大视场光学畸变的激光雷达控制方法,包括理想光学系统、实际情况的激光雷达收发系统,包括有以下步骤:
7.s1:检测基于面阵探测器的大视场激光雷达接收系统,因为存在光学畸变,与理想光学系统相比,视场边缘的子像素对应的视场角变大,视场中心的子像素对应的视场角变小;
8.s2:据光学仿真确定单位视场角的光学畸变量;
9.s3:当激光扫描区域301时开启探测器a,激光扫描区域时开启探测器b,以此类推,直到激光扫描区域时开启探测器f,必定会有部分扫描光斑与探测器不重合;
10.s4:打开激光脉冲,激光脉冲按照特定重复频率均匀发射,在视场上形成等间隔光斑;
11.s5:发射第1
‑
5次激光脉冲,打开探测器a;发射第6
‑
10次激光脉冲120,打开探测器b;发射第11
‑
14次激光脉冲,打开探测器c;发射第15
‑
18次激光脉冲,打开探测器d;发射第19
‑
21次激光脉冲,打开探测器e;直到发射第22
‑
24次激光脉冲,打开探测器f;
12.s6:在信号处理阶段,信号处理时间将探测器a接收的第1
‑
4次脉冲进行累积;信号处理时间将探测器a接收的第5次脉冲和探测器b接收的第1
‑
3次脉冲进行累积;信号处理时间将探测器b接收的第4
‑
5次脉冲和探测器c接收的第1
‑
2次脉冲进行累积;信号处理时间将探测器c接收的第3
‑
4次脉冲和探测器d接收的1
‑
2次脉冲进行累积;信号处理时间将探测器d接收的第3
‑
4次脉冲和探测器e接收的第1
‑
2次脉冲进行累积;直到信号处理将探测器e的第3次脉冲和探测器f的第1
‑
3次脉冲进行累积。
13.优选地,所述s1中:所述激光器通过一维旋转电机匀速扫描预定区域,面阵探测器通过光学系统覆盖视场。
14.优选地,所述激光器扫描区域与面阵探测器的视场重合。
15.优选地,所述s3中,按照光学畸变情况,在适当的时刻开启适当的探测器,将发射与接收做匹配。
16.优选地,水平的视场为120
°
,探测器为1x12阵列,每个探测器单元对应子像素视场为10
°
,激光器在一个子像素内发射发激光脉冲,以增加信噪比。
17.优选地,实际系统中的面阵探测器不仅限于1x12阵列,水平方向为100
‑
1000个子像素,子像素视场可小于0.1
°
;实际的激光器在一个子像素内发射10
‑
1000发激光脉冲。
18.本发明中的有益效果为:
19.1、该校正大视场光学畸变的激光雷达控制方法,通过改变接收单元的控制时序,补偿光学畸变引发的光斑与探测器不匹配现象,以提高激光雷达系统的测距能力。
20.2、该校正大视场光学畸变的激光雷达控制方法,本发明不仅限于子像素的顺序选通,亦可能是跳跃选通。激光脉冲不仅限于均匀发射,亦可能是服从某种逻辑的疏密排列,主要目的为提高扫描光斑与子像素之间的匹配度。
21.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
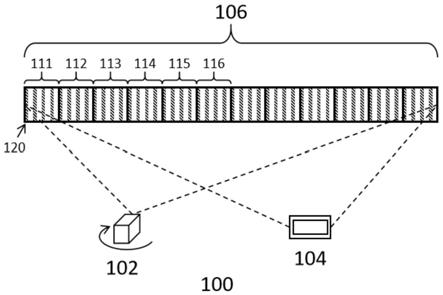
22.图1为本发明提出的一种校正大视场光学畸变的激光雷达控制方法的理想光学系统示意图;
23.图2为本发明提出的一种校正大视场光学畸变的激光雷达控制方法的实际情况的激光雷达收发系统示意图;
24.图3为本发明提出的一种校正大视场光学畸变的激光雷达控制方法的校正大视场光学畸变的原理示意图;
25.图4为本发明提出的一种校正大视场光学畸变的激光雷达控制方法的校正大视场光学畸变的控制逻辑示意图。
26.图中:100理想光学系统、102激光器、104面阵探测器、106视场、111
‑
116理想状态子像素视场;120激光脉冲、200实际情况的激光雷达收发系统、201
‑
206实际情况子像素视
场、301
‑
306实际像素对应的激光扫描区域、401
‑
406信号处理时间。
具体实施方式
27.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
28.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
29.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
30.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
31.参照图1
‑
4,一种校正大视场光学畸变的激光雷达控制方法,包括理想光学系统100、实际情况的激光雷达收发系统200,包括有以下步骤:
32.s1:检测基于面阵探测器的大视场激光雷达接收系统,因为存在光学畸变,与理想光学系统相比,视场边缘的子像素对应的视场角变大,视场中心的子像素对应的视场角变小;
33.s2:根据光学仿真确定单位视场角的光学畸变量;
34.s3:当激光扫描区域301时开启探测器a,激光扫描区域302时开启探测器b,以此类推,直到激光扫描区域306时开启探测器f,必定会有部分扫描光斑与探测器不重合;
35.s4:打开激光脉冲120,激光脉冲120按照特定重复频率均匀发射,在视场106上形成等间隔光斑;
36.s5:发射第1
‑
5次激光脉冲120,打开探测器a;发射第6
‑
10次激光脉冲120,打开探测器b;发射第11
‑
14次激光脉冲120,打开探测器c;发射第15
‑
18次激光脉冲120,打开探测器d;发射第19
‑
21次激光脉冲120,打开探测器e;直到发射第22
‑
24次激光脉冲120,打开探测器f;
37.s6:在信号处理阶段,信号处理时间401将探测器a接收的第1
‑
4次脉冲进行累积;信号处理时间402将探测器a接收的第5次脉冲和探测器b接收的第1
‑
3次脉冲进行累积;信号处理时间403将探测器b接收的第4
‑
5次脉冲和探测器c接收的第1
‑
2次脉冲进行累积;信号处理时间404将探测器c接收的第3
‑
4次脉冲和探测器d接收的1
‑
2次脉冲进行累积;信号处理时间405将探测器d接收的第3
‑
4次脉冲和探测器e接收的第1
‑
2次脉冲进行累积;直到信号处理406将探测器e的第3次脉冲和探测器f的第1
‑
3次脉冲进行累积。
38.本发明中,所述s1中:所述激光器102通过一维旋转电机匀速扫描预定区域,面阵探测器104通过光学系统覆盖视场106。
39.本发明中,所述激光器102的扫描区域与探测器104的视场106重合。
40.本发明中,所述s3中,按照光学畸变情况,在适当的时刻开启适当的探测器,将发
射与接收做匹配。
41.本发明中,水平的视场106为120
°
,探测器104为1x12阵列,每个探测器单元对应子像素视场为10
°
,激光器102在一个子像素内发射发激光脉冲120,以增加信噪比。
42.本发明中,实际系统中的面阵探测器104不仅限于1x12阵列,水平方向为100
‑
1000个子像素,子像素视场可小于0.1
°
;实际的激光器102在一个子像素内发射10
‑
1000发激光脉冲120。
43.本实施例仅分析水平视场引起的畸变,因为常规激光雷达系统的水平视场大于100
°
,垂直视场小于30
°
,光学畸变主要存在于水平方向。在本实施例中水平视场106为120
°
,探测器104为1x12阵列,每个探测器单元对应子像素视场为10
°
。激光器102在一个子像素内发射4发激光脉冲120,以增加信噪比。应当注意的是,实际系统中的探测器104不仅限于1x12阵列,水平方向可能有100
‑
1000个子像素,子像素视场可能小于0.1
°
;实际激光器102在一个子像素内可能发射10
‑
1000发激光脉冲120。
44.应当注意的是,实际系统中的探测器104不仅限于1x12阵列,水平方向可能有100
‑
1000个子像素,光学畸变引发的扫描光斑与子像素不匹配现象更为复杂。
45.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1