载波调制深度和相位延迟的测量方法及载波解调系统
1.本发明涉及光纤传感技术领域,尤其涉及一种载波调制深度和相位延迟的测量方法及载波解调系统。
背景技术:
2.近年来,相位生成载波(pgc)解调方案一直是光纤传感领域的一个研究热点已经在光纤水听器、光纤地震计、光纤麦克风等光纤传感器的信号提取中获,得了广泛应用。相位生成载波解调方案具有动态范围大,稳定性好,组网结构简单,易于实现全光化的传感网络等优点。但是,相位生成载波方案要求调制深度维持在固定值(2.63或2.37)和载波相位延迟为0,否则会影响解调结果的一致性和稳定性。因此,有必要对载波调制深度和载波相位延迟进行测量。
3.目前提出的很多调制深度和载波相位延迟的测量方法存在测量精度受限、复杂度和运算量大以及实时性较差的缺点。
技术实现要素:
4.(一)要解决的技术问题
5.鉴于此,针对目前载波调制深度和载波相位延迟测量方案存在的实时性差、运算复杂问题以及测量精度的问题,本发明通过计算干涉条纹特定频点的能量实现载波调制深度和载波相位延迟的同步测量,过程简单、运算量小且测量实时。
6.(二)技术方案
7.本发明一方面提供了一种载波调制深度和相位延迟的测量方法,包括:
8.获得载波的干涉条纹;在至少3个预设倍频下,计算每一倍频对应的干涉条纹的频点能量,得到至少3个频点能量;根据所述至少3个频点能量计算所述载波的调制深度m和相位延迟
9.可选地,所述在至少3个预设倍频下,计算每一倍频对应的干涉条纹的频点能量包括:基于贝塞尔函数将所述干涉条纹展开;根据展开的贝塞尔函数的阶数确定所述至少3个预设倍频。
10.可选地,所述在多个预设倍频下,计算每一倍频对应的干涉条纹的频点能量包括:采用至少3组并行的goertzel算法计算每一倍频对应的干涉条纹的频点能量。
11.可选地,根据所述至少3个频点能量计算所述载波的调制深度m包括:
12.m=2ivi/[v
i-1
+v
i+1
]
[0013]
其中,i为贝塞尔函数的阶数,vi为干涉条纹i倍频的频点能量。
[0014]
可选地,根据所述至少3个频点能量计算所述载波的相位延迟包括:
[0015][0016]
其中,i为贝塞尔函数的阶数,vi为干涉条纹i倍频的频点能量,im(vi)为复数vi的
虚部,re(vi)为复数vi的实部。
[0017]
可选地,根据所述至少3个频点能量计算所述载波的调制深度m还包括:选取不同的i值,得到多组m=2ivi/[v
i-1
+v
i+1
];通过所述多组m=2ivi/[v
i-1
+v
i+1
]组合计算调制深度m。
[0018]
可选地,所述通过所述多组m=2ivi/[v
i-1
+v
i+1
]组合计算调制深度m包括:
[0019][0020]
其中,i取2、3、4、5。
[0021]
可选地,所述通过所述多组m=2ivi/[v
i-1
+v
i+1
]组合计算调制深度m包括:
[0022][0023]
其中,i取2、3、4。
[0024]
本发明另一方面提供了一种载波解调系统,包括:
[0025]
可调谐窄线宽激光器10,适用于提供窄线宽激光;
[0026]
光隔离器20,适用于防止所述窄线宽激光被外界因素干扰;
[0027]
光衰减器30,适用于将所述窄线宽激光的光功率调节在光电探测器60响应范围内;
[0028]
光纤环形器40,适用于将所述窄线宽激光传输至干涉式光纤传感器50,并将所述干涉式光纤传感器50的干涉条纹传输至所述光电探测器(60);
[0029]
干涉式光纤传感器50,适用于将所述窄线宽激光转换为所述干涉条纹;
[0030]
光电探测器60,适用于将所述干涉条纹转换为电信号;
[0031]
数据采集卡70,适用于将所述电信号转变为数字信号;
[0032]
运算单元80,适用于接收所述数字信号,采用如上所述的测量方法测量载波调制深度和载波相位延迟;
[0033]
载波信号发生器90,适用于发出所述调制深度和所述载波相位的载波信号,其中,所述载波信号用于调制所述可调谐窄线宽激光器10。
[0034]
(三)有益效果
[0035]
本发明提供的测量方法可有效降低载波调制深度和载波相位延迟测量的运算复杂度。同时,本发明还通过多组并行goertzel算法实时计算多个特定的频点能量,有助于提高载波调制深度和载波相位延迟测量的实时性。
[0036]
本发明提供的相位生成载波解调系统中,根据实时计算的载波调制深度和载波相位延迟,实时调整载波信号发生器90的输出正弦波的幅值和相位,使得载波调制深度和载波相位延迟稳定在理想值,从而提高光纤传感器解调系统的一致性和稳定性。
附图说明
[0037]
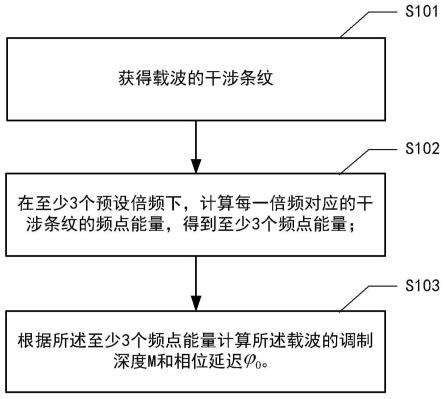
图1示出了本发明提供的测量方法的流程图。
[0038]
图2示意性示出了本发明提供的测量系统的示意图。
具体实施方式
[0039]
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。
[0040]
本发明提供了一种载波调制深度和相位延迟的测量方法,参阅图1,包括:
[0041]
s101、获得载波的干涉条纹。
[0042]
s102、在至少3个预设倍频下,计算每一倍频对应的干涉条纹的频点能量,得到至少3个频点能量。
[0043]
s103、根据所述至少3个频点能量计算所述载波的调制深度m和相位延迟
[0044]
本发明的s101步骤获得光纤干涉仪输出的干涉条纹,其可用下下式表示:
[0045][0046]
其中,a为干涉条纹直流分量,b为干涉条纹交流分量幅值,m为调制深度,ωm为调制角频率,为载波相位延迟,为传感信号。
[0047]
在本发明的步骤102中,在至少3个预设倍频下,计算每一倍频对应的干涉条纹的频点能量,得到至少3个频点能量,其包括一下子步骤:
[0048]
基于贝塞尔函数将所述干涉条纹展开;
[0049]
根据展开的贝塞尔函数的阶数确定所述至少3个预设倍频。
[0050]
首先,将用贝塞尔函数ji(m)展开,得到:
[0051][0052]
然后根据贝塞尔函数的递归关系,调制深度m可表示为:
[0053]
m=2iji(m)/[j
i-1
(m)+j
i+1
(m)]
[0054]
其中,i为贝塞尔函数的阶数。
[0055]
接着,设载波调制频率的i倍频的频点能量为vi,由于vi∝
2ji(m),则m的表达式还可表示为:
[0056]
m=2ivi/[v
i-1
+v
i+1
]
[0057]
因此,本发明可以根据贝塞尔函数的阶数,来确定至少3个预设倍频,以根据上式计算的调整深度m。例如,贝塞尔函数的阶数i取2,则对应的预设倍频为1、2、3,对应的频点能量v1、v2、v3,则m=4v2/(v1+v3)。
[0058]
单独对载波的干涉条纹的i倍频的频点能量做分析,根据相位角特性即可求得载波的相位延迟其公式表示如下:
[0059][0060]
im(vi)为复数vi的虚部,re(vi)为复数vi的实部,atan()为反正切函数。因此,将vi实部和虚部代入上式,即可求得相位延迟
[0061]
进一步地,在本发明的步骤s103中,在多个预设倍频下,计算每一倍频对应的干涉条纹的频点能量包括:采用至少3组并行的goertzel算法计算每一倍频对应的干涉条纹的频点能量。本发明提出多组并行实施goertzel算法的方式实时同步计算载波预设倍频的频点能量。goertzel算法可以从采样数据中有选择的求出特定频率信号的能量,在只需要计算少数感兴趣频点能量时,基于递归计算的goertzel算法比fft算法更加快速、灵活。其传递函数如下:
[0062][0063]
在本发明一实施例中,本发明基于fpga的并行运算特点,提出基于fpga的goertzel算法的并行实施方式,在fpga模块获得载波的干涉条纹后,其内部同步实施运行多组goertzel算法。
[0064]
通过m=2ivi/[v
i-1
+v
i+1
]可知,本发明通过贝塞尔函数的阶数i,可以确定所需的频点能量vi、v
i+1
、v
i-1
,从而计算得载波的调整深度m,该方法可有效降低载波调制深度和载波相位延迟测量的运算复杂度。同时,本发明还通过多组并行goertzel算法实时计算多个特定的频点能量,有助于提高载波调制深度和载波相位延迟测量的实时性。
[0065]
进一步的,在本发明提出的测量方法中,根据至少3个频点能量计算所述载波的调制深度m还包括:选取不同的i值,得到多组m=2ivi/[v
i-1
+v
i+1
];通过所述多组m=2ivi/[v
i-1
+v
i+1
]组合计算调制深度m。基于此,本发明提供的测量方法能避免因(v
i+1
+v
i-1
)出现过小或者为0的情况而出现测量误差较大的情况发生,有效的消除误差,使测量结果更准确。
[0066]
可通过多组并行的goertzel算法实时计算6个特定的频点能量,包括1~6倍频频点的能量v1~v6。
[0067]
在本发明一实施例中,当i取2、3、4、5时,可得到调整深度m的计算公式为:
[0068][0069]
进而,可得:
[0070][0071]
于是可得:
[0072][0073]
即:
[0074][0075]
将上述的1~6倍频频点的能量v1~v6代入上式即可得更加准确的调制深度m的值。
[0076]
在本发明另一实施例中,选取任意三组贝塞尔阶数相邻的m的计算公式,可得:
[0077][0078]
因此,有:
[0079][0080]
消除上述公式中vi及v
i+2
,得:
[0081][0082]
取i为2,得
[0083][0084]
即上式是利用2、3、4的m的计算公式组合计算得出的。
[0085]
本发明还提供了一种相位生成载波解调系统包括:
[0086]
可调谐窄线宽激光器10,适用于提供窄线宽激光;
[0087]
光隔离器20,适用于防止所述窄线宽激光被外界因素干扰;
[0088]
光衰减器30,适用于将所述窄线宽激光的光功率调节在光电探测器60响应范围内;
[0089]
光纤环形器40,适用于将所述窄线宽激光传输至干涉式光纤传感器50,并将所述干涉式光纤传感器50的干涉条纹传输至所述光电探测器(60);
[0090]
干涉式光纤传感器50,适用于将所述窄线宽激光转换为所述干涉条纹;
[0091]
光电探测器60,适用于将所述干涉条纹转换为电信号;
[0092]
数据采集卡70,适用于将所述电信号转变为数字信号;
[0093]
运算单元80,适用于接收所述数字信号,采用如上所述的测量方法测量载波调制深度和载波相位延迟;
[0094]
载波信号发生器90,适用于发出所述调制深度和所述载波相位的载波信号,其中,所述载波信号用于调制所述可调谐窄线宽激光器10。
[0095]
如图2所示,可调谐窄线宽激光器10发出单频激光,即载波,通过光衰减器20和光隔离器30传输至光纤环形器40的入射端口,然后从光纤环形器40的第一个出射端口传入干涉式光纤传感器50,干涉式光纤传感器50的基本原理为michelson干涉仪,由一个光纤耦合器、两根光纤、以及两个法拉第旋转镜组成,输入激光通过光纤耦合器一分为二,然后再光
纤中传输并经过两个法拉第旋转镜反射后,从光纤耦合器出射,其中法拉第旋转镜的作用为抗偏振衰落;干涉式光纤传感器50的返回光为载波的干涉条纹,通过光纤环形器40的第一个出射端口进入,然后由光纤环形器40的第二个出射端口出射。载波信号发生器90用于发出特定频率的正弦调制信号调制可调谐窄线宽激光器10。
[0096]
光纤环形器40的出射光进入光电探测器60,实现光信号向电信号的转化;之后,光电探测器60输出的模拟电信号通过信号采集卡70转化为数字信号,此时完成干涉条纹的采集;信号采集卡70输出的数字信号进入运算单元80,实现载波调制深度和载波相位延迟的低复杂度、高实时性计算。运算单元80可选用现场可编程逻辑门阵列(fpga)。
[0097]
在本发明提供的系统中,根据实时计算的m和实时调整载波信号发生器90的输出正弦波的幅值和相位,使得m和稳定在理想值,从而提高光纤传感器解调系统的一致性和稳定性。
[0098]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1