一种跨河水准测量方法及系统与流程
1.本发明涉及水准测量技术领域,特别是涉及一种跨河水准测量方法及系统。
背景技术:
2.传统的几何水准测量在平坦地区仍是高程传递的主要方法,其具有测量精度高、操作简单、线路灵活等优点,但是由于受测量视线长度限制,当水准路线必须跨越江河或峡谷时,传统的几何水准测量方法将无法实现直接跨越测量。而传统的跨河水准测量方法,如光学测微法、倾斜螺旋法、经纬仪倾角法等测量视线短,因此在超过测量视线范围后无法准确测量。
技术实现要素:
3.本发明的目的是提供一种跨河水准测量方法及系统,以在实现跨越江河或峡谷时长距离水准测量的同时提高测量精度。
4.为实现上述目的,本发明提供了如下方案:
5.一种跨河水准测量方法,所述方法包括:
6.在河流的两岸分别布设临时水准点、设站点和中间棱镜点;所述临时水准点的高程由已知水准点通过几何水准测量的方法测得;
7.在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜;
8.利用两岸的全站仪分别对同岸架设在中间棱镜点的棱镜进行同岸观测,获得第一观测数据;所述第一观测数据包括平距和垂直角;
9.利用两岸的全站仪分别向对岸架设在中间棱镜点的棱镜进行对向观测,获得第二观测数据;
10.将其中一个河岸的棱镜架设在同岸的临时水准点,并利用同岸的全站仪对同岸架设在临时水准点的棱镜进行同岸观测,获得第三观测数据;
11.将架设在临时水准点的棱镜迁移至对岸的临时水准点,并利用对岸的全站仪对架设在临时水准点的棱镜进行同岸观测,获得第四观测数据;
12.根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,获得本次观测的两岸临时水准点的高差。
13.可选的,在河流的两岸分别布设的设站点和中间棱镜点按照大地四边形布设,设站点与中间棱镜点的距离为5~10米;
14.在河流的两岸分别布设的临时水准点、设站点和中间棱镜点均具有十字丝的测量标志,标志顶部经过磨圆处理,具有唯一最高点。
15.可选的,所述在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜,之前还包括:
16.根据误差传播定律,利用公式
计算对向观测高差中误差;其中,m
h
为对向观测高差中误差,α为垂直角,m
d
为测距中误差,ρ为常数,m
v
为棱镜高中误差,d为测量两点之间的距离,m
k
为大气折光中误差,m
a
为测角中误差;
17.根据对向观测高差中误差和两岸临时水准点的距离,通过查找垂直角测回数与高差中误差的关系表,确定全站仪观测的测回数。
18.可选的,所述在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜,之后还包括:
19.通过各自河岸的温度气压计测量各自河岸的气象参数,并将气象参数输入各自河岸的全站仪;所述气象参数包括温度、气压和湿度;
20.静置全站仪,直至全站仪的温度与各自河岸的温度一致。
21.可选的,所述根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,获得本次观测的两岸临时水准点的高差,具体包括:
22.根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,利用公式获得本次观测的两岸临时水准点的高差;
23.其中,为本次观测的两岸临时水准点的高差,h2‑7为第一种连接线路时两岸临时水准点的高差,h7‑2为第二种连接线路时两岸临时水准点的高差,h2‑3为后视设站点和后视临时水准点的高差,h3‑4为后视设站点和后视中间棱镜点的高差,h4‑6为后视中间棱镜点和前视设站点的高差,h6‑7为前视设站点和前视临时水准点的高差,h7‑6为前视临时水准点和前视设站点的高差,h6‑5为前视设站点和前视中间棱镜点的高差,h5‑3为前视中间棱镜点和后视设站点的高差,h3‑2为后视设站点和后视临时水准点的高差;编号i的取值为2、3、4、6、7、6、5、3,对应的编号j的取值依次为3、4、6、7、6、5、3、2;h
i
‑
j
为i和j的高差,d
i
、d
j
分别为i和j的平距,α
i
、α
j
分别为i和j的垂直角,r为地球平均曲率半径,k
i
、k
j
分别为i和j处的大气折光系数,v
i
、v
j
分别为i和j处的棱镜高;后视设站点、后视临时水准点和后视中间棱镜点为同一河岸布设的点位,前视设站点、前视临时水准点和前视中间棱镜点为对岸布设的点位。
24.可选的,所述根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,获得本次观测的两岸临时水准点的高差,之后还包括:
25.将两岸的全站仪、棱镜互换,返回步骤“在在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜”,获得下次观测的两岸临时水准点的高差;
26.将本次观测的两岸临时水准点的高差和下次观测的两岸临时水准点的高差的平均值确定为两岸临时水准点的最终高差。
27.一种跨河水准测量系统,所述系统包括:
28.布设模块,用于在河流的两岸分别布设临时水准点、设站点和中间棱镜点;所述临时水准点的高程由已知水准点通过几何水准测量的方法测得;
29.仪器架设模块,用于在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜;
30.第一观测数据获得模块,用于利用两岸的全站仪分别对同岸架设在中间棱镜点的棱镜进行同岸观测,获得第一观测数据;所述第一观测数据包括平距和垂直角;
31.第二观测数据获得模块,用于利用两岸的全站仪分别向对岸架设在中间棱镜点的棱镜进行对向观测,获得第二观测数据;
32.第三观测数据获得模块,用于将其中一个河岸的棱镜架设在同岸的临时水准点,并利用同岸的全站仪对同岸架设在临时水准点的棱镜进行同岸观测,获得第三观测数据;
33.第四观测数据获得模块,用于将架设在临时水准点的棱镜迁移至对岸的临时水准点,并利用对岸的全站仪对架设在临时水准点的棱镜进行同岸观测,获得第四观测数据;
34.高差计算模块,用于根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,获得本次观测的两岸临时水准点的高差。
35.可选的,在河流的两岸分别布设的设站点和中间棱镜点按照大地四边形布设,设站点与中间棱镜点的距离为5~10米;
36.在河流的两岸分别布设的临时水准点、设站点和中间棱镜点均具有十字丝的测量标志,标志顶部经过磨圆处理,具有唯一最高点。
37.可选的,所述高差计算模块,具体包括:
38.高差计算子模块,用于根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,利用公式获得本次观测的两岸临时水准点的高差;
39.其中,为本次观测的两岸临时水准点的高差,h2‑7为第一种连接线路时两岸临时水准点的高差,h7‑2为第二种连接线路时两岸临时水准点的高差,h2‑3为后视设站点和后视临时水准点的高差,h3‑4为后视设站点和后视中间棱镜点的高差,h4‑6为后视中间棱镜点和前视设站点的高差,h6‑7为前视设站点和前视临时水准点的高差,h7‑6为前视临时水准点和前视设站点的高差,h6‑5为前视设站点和前视中间棱镜点的高差,h5‑3为前视中间棱镜点和后视设站点的高差,h3‑2为后视设站点和后视临时水准点的高差;编号i的取值为2、3、4、6、7、6、5、3,对应的编号j的取值依次为3、4、6、7、6、5、3、2;h
i
‑
j
为i和j的高差,d
i
、d
j
分别为i和j的平距,α
i
、α
j
分别为i和j的垂直角,r为地球平均曲率半径,k
i
、k
j
分别为i和j处的大气折光系数,v
i
、v
j
分别为i和j处的棱镜高;后视设站点、后视临时水准点和后视中间棱镜点为
同一河岸布设的点位,前视设站点、前视临时水准点和前视中间棱镜点为对岸布设的点位。
40.可选的,所述系统还包括:
41.仪器互换模块,用于将两岸的全站仪、棱镜互换,返回步骤“在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜”,获得下次观测的两岸临时水准点的高差;
42.最终高差确定模块,用于将本次观测的两岸临时水准点的高差和下次观测的两岸临时水准点的高差的平均值确定为两岸临时水准点的最终高差。
43.根据本发明提供的具体实施例,本发明公开了以下技术效果:
44.本发明公开了一种跨河水准测量方法及系统,利用两岸的全站仪分别对架设在中间棱镜点的棱镜进行同岸观测和对向观测,将同一棱镜分别架设在两岸的临时水准点进行同岸观测,根据观测数据进行水准测量的内业计算,获得本次观测的两岸临时水准点的高差,利用精密三角高程测量的方式实现了跨越江河或峡谷时的长距离水准测量,并提高了测量精度,同时通过使用全站仪进一步提高了测量精度。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
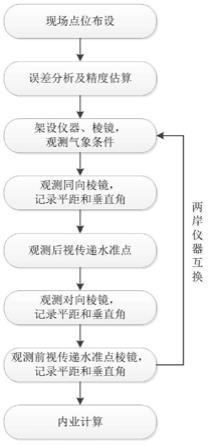
46.图1为本发明提供的一种跨河水准测量方法的流程图;
47.图2为本发明提供的一种跨河水准测量方法的原理图;
48.图3为本发明提供的现场点位布设图;
49.图4为本发明提供的第一种连接线路图;
50.图5为本发明提供的第二种连接线路图。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.本发明的目的是提供一种跨河水准测量方法及系统,以在实现跨越江河或峡谷时长距离水准测量的同时提高测量精度。
53.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
54.实施例一
55.本发明利用精密三角高程,提供了一种跨河水准测量方法,如图1所示,方法包括:
56.步骤101,在河流的两岸分别布设临时水准点、设站点和中间棱镜点;临时水准点的高程由已知水准点通过几何水准测量的方法测得;
57.在河流的两岸分别布设的设站点和中间棱镜点按照大地四边形布设,设站点与中
间棱镜点的距离为5~10米;
58.在河流的两岸分别布设的临时水准点、设站点和中间棱镜点均具有十字丝的测量标志,标志顶部经过磨圆处理,具有唯一最高点。
59.误差分析及精度估算:根据误差传播定律,利用公式计算对向观测高差中误差;其中,m
h
为对向观测高差中误差,α为垂直角,m
d
为测距中误差,ρ为常数,m
v
为棱镜高中误差,d为测量两点之间的距离,m
k
为大气折光中误差,m
a
为测角中误差;
60.根据对向观测高差中误差和两岸临时水准点的距离,通过查找垂直角测回数与高差中误差的关系表,确定全站仪观测的测回数。
61.步骤102,在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜;
62.之后观测气象条件:
63.通过各自河岸的温度气压计测量各自河岸的气象参数,并将气象参数输入各自河岸的全站仪;气象参数包括温度、气压和湿度;
64.静置全站仪,直至全站仪的温度与各自河岸的温度一致。
65.步骤103,利用两岸的全站仪分别对同岸架设在中间棱镜点的棱镜进行同岸观测,获得第一观测数据;第一观测数据包括平距和垂直角;
66.步骤104,利用两岸的全站仪分别向对岸架设在中间棱镜点的棱镜进行对向观测,获得第二观测数据;
67.步骤105,将其中一个河岸的棱镜架设在同岸的临时水准点,并利用同岸的全站仪对同岸架设在临时水准点的棱镜进行同岸观测,获得第三观测数据;
68.步骤106,将架设在临时水准点的棱镜迁移至对岸的临时水准点,并利用对岸的全站仪对架设在临时水准点的棱镜进行同岸观测,获得第四观测数据;
69.棱镜在迁移过程中高度保持不变。
70.步骤107,根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,获得本次观测的两岸临时水准点的高差,具体包括:
71.根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,利用公式获得本次观测的两岸临时水准点的高差;
72.其中,为本次观测的两岸临时水准点的高差,h2‑7为第一种连接线路时两岸临时水准点的高差,h7‑2为第二种连接线路时两岸临时水准点的高差,h2‑3为后视设站点和后
视临时水准点的高差,h3‑4为后视设站点和后视中间棱镜点的高差,h4‑6为后视中间棱镜点和前视设站点的高差,h6‑7为前视设站点和前视临时水准点的高差,h7‑6为前视临时水准点和前视设站点的高差,h6‑5为前视设站点和前视中间棱镜点的高差,h5‑3为前视中间棱镜点和后视设站点的高差,h3‑2为后视设站点和后视临时水准点的高差;编号i的取值为2、3、4、6、7、6、5、3,对应的编号j的取值依次为3、4、6、7、6、5、3、2;h
i
‑
j
为i和j的高差,d
i
、d
j
分别为i和j的平距,α
i
、α
j
分别为i和j的垂直角,r为地球平均曲率半径,k
i
、k
j
分别为i和j处的大气折光系数,v
i
、v
j
分别为i和j处的棱镜高;后视设站点、后视临时水准点和后视中间棱镜点为同一河岸布设的点位,前视设站点、前视临时水准点和前视中间棱镜点为对岸布设的点位。
73.第一种连接线路如图4所示,第二种连接线路如图5所示。
74.为了提高两岸临时水准点的高差计算精度,完成本次观测后还可以继续执行以下步骤:
75.将两岸的全站仪、棱镜互换,返回步骤“在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜”,获得下次观测的两岸临时水准点的高差;
76.将本次观测的两岸临时水准点的高差和下次观测的两岸临时水准点的高差的平均值确定为两岸临时水准点的最终高差。
77.本发明利用两台全站仪同时对向观测,有利于削减大气垂直折光影响。
78.在一个侧段上对向观测的边为偶数条边,避免量取仪器高和觇标高。
79.并且限制观测边的长度和高度角,以减少大气垂直折光和相对垂线偏差的影响。
80.本发明中利用精密三角高程实现跨河水准测量的方法,相较于光学测微法、倾斜螺旋法、经纬仪倾角法等传统的跨河水准测量方法,电磁波测距三角高程法具有适应性强、快速简便等优点。特别是近年来全站仪的发展提高了测角和测距的精度,同时自动化程度越来越高——测量机器人能自动识别、跟踪和精确照准目标,大大提高了工作效率。
81.实施例二
82.结合图3所示的现场点位布设图,参照图2进一步详细说明本发明的测量方法。
83.(1)现场点位布设
84.主要包括后视临时水准点2和前视临时水准点7、后视设站点3和前视设站点6、后视中间棱镜点4和前视中间棱镜点5。
85.上述各点位应采用具有十字丝的测量标志,标志顶部应经过磨圆处理,具有唯一最高点。测站3、6到中间棱镜点4、5和到临时水准点2、7的垂直角均控制在1
°
以内,跨河点3、4、5、6应按大地四边形布设。设站点3、6分别与中间棱镜点4、5的距离宜为5~10米,且二者距离差宜控制在1米内。设站点3、6分别与临时水准点2、7的距离差应尽量保证相同,距离差宜控制在0.5米内。上述各点位应在靠近线路附近河流相对较窄处布设。
86.后视临时水准点2和前视临时水准点7的高程分别由后视已知水准点1和前视已知水准点8通过水准测量的方法测得。
87.(2)误差分析及精度估算
88.根据误差传播定律,求得对向观测高差中误差为:
[0089][0090]
结合高差中误差计算公式,使用leica ts60全站仪,采用中间设站法、无仪器高、
棱镜高的方法进行观测时,可推出垂直角测回数与高差中误差m
h
之间的关系,并根据技术要求及两水准点的距离确定观测的测回数。
[0091]
(3)架设仪器、棱镜,观测气象条件
[0092]
跨河水准测量应采用leica ts60(标称精度:测角0.5
″
,测距0.6mm+1ppm)全站仪2台及配套的原装棱镜,温度气压计等。
[0093]
垂直角测量同一测回盘左盘右均2次读数,2次读数之差≤1
″
;指标差测回互差≤4
″
;垂直角测回互差≤4
″
。
[0094]
在两岸设站点3和6上分别架设仪器,在中间棱镜点4和5上分别架设棱镜,开机静置30分钟,使仪器与周围环境温度一致,通过温度气压计测量实时温度、气压、湿度等,并将气象参数输入全站仪。
[0095]
在下面观测时,应选择气温、气压较为稳定的时间段(晚上,阴天,22时至第二天凌晨3时)。
[0096]
(4)观测同向棱镜,记录平距和垂直角
[0097]
3和6上架设的全站仪分别对同岸棱镜4和5观测,记录平距和竖直角,测回数应按照误差分析确定的测回数进行观测。观测采用盘左、盘右分别进行观测,并对观测数据进行记录,记录应包括项目名称、仪器编号、观测者、记录者、观测日期、观测时间、天气、温度等基本信息。
[0098]
每个测回的观测都会得到一组平距和水平角,该步骤最终得到的是平距和垂直角观测的各测回的平均值。
[0099]
(5)观测后视临时水准点
[0100]
除采用全站仪外,还应采用对中杆、棱镜、觇牌等进行观测,对中杆设定好固定高度,后视设站点3对后视临时水准点2进行观测,测回数应符合误差分析确定的测回数,记录平距和垂直角,观测采用盘左、盘右分别进行观测,并对观测数据进行记录,记录应包括项目名称、仪器编号、观测者、记录者、观测日期、观测时间、天气、温度等基本信息。
[0101]
(6)观测对向棱镜,记录平距和垂直角
[0102]
后视设站点3架设的全站仪对前视中间棱镜5进行观测,同时,前视设站点6架设的全站仪对后视中间棱镜4进行观测,两边进行分组同步观测,应至少分为4组观测,每组按照误差分析确定的测回数进行观测,记录平距和垂直角,每组对向观测保证同一时段进行。
[0103]
当进行分组对向观测时,(m
δ
为每千米水准测量的偶然中误差(取1mm),n为测回数,s为跨河视线长度(km))。
[0104]
(7)观测前视临时水准点棱镜,记录平距和垂直角
[0105]
对向长边观测结束后,将用于后视观测的对中杆及棱镜转移至前视临时水准点7上,保持对中杆高度不变,同岸全站仪对前视临时水准点进行观测,记录平距和垂直角,测回数应符合误差分析确定的测回数。
[0106]
(8)两岸仪器互换,重复(3)
‑
(7)进行返测
[0107]
两岸仪器应进行编号,防止在观测时仪器使用错乱,两岸仪器互换后,应将仪器静置,使仪器与周围环境温度一致,重新测量实时温度、气压、湿度等,并将气象参数输入全站仪。
[0108]
(9)内业计算
[0109]
三角高程测量单次观测的高差计算公式为:
[0110][0111]
式中:h
12
——后视点与前视点之间的高差(m);d1、d2——后视、前视水平距离(m);α1、α1——后视、前视垂直角;r——地球平均曲率半径(m);v1、v2——后视、前视棱镜高(m);k1、k2——大气折光系数。
[0112]
临时水准点2、7两点高差的计算公式为:
[0113]
h2‑7=h2‑3+h3‑4+h4‑6+h6‑7,h7‑2=h7‑6+h6‑5+h5‑3+h3‑2[0114][0115]
通过观测和计算求出临时水准点2和7的高差后,结合2和7的高程还可以计算出该线路的闭合差(附合差)。
[0116]
本发明能够在水准测量尤其是跨越江河进行水准测量时,提高工作效率,增加社会效益与经济效益。
[0117]
实施例三
[0118]
一种跨河水准测量系统,系统包括:
[0119]
布设模块,用于在河流的两岸分别布设临时水准点、设站点和中间棱镜点;临时水准点的高程由已知水准点通过几何水准测量的方法测得;
[0120]
仪器架设模块,用于在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜;
[0121]
第一观测数据获得模块,用于利用两岸的全站仪分别对同岸架设在中间棱镜点的棱镜进行同岸观测,获得第一观测数据;第一观测数据包括平距和垂直角;
[0122]
第二观测数据获得模块,用于利用两岸的全站仪分别向对岸架设在中间棱镜点的棱镜进行对向观测,获得第二观测数据;
[0123]
第三观测数据获得模块,用于将其中一个河岸的棱镜架设在同岸的临时水准点,并利用同岸的全站仪对同岸架设在临时水准点的棱镜进行同岸观测,获得第三观测数据;
[0124]
第四观测数据获得模块,用于将架设在临时水准点的棱镜迁移至对岸的临时水准点,并利用对岸的全站仪对架设在临时水准点的棱镜进行同岸观测,获得第四观测数据;
[0125]
高差计算模块,用于根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,获得本次观测的两岸临时水准点的高差。
[0126]
在河流的两岸分别布设的设站点和中间棱镜点按照大地四边形布设,设站点与中间棱镜点的距离为5~10米;
[0127]
在河流的两岸分别布设的临时水准点、设站点和中间棱镜点均具有十字丝的测量标志,标志顶部经过磨圆处理,具有唯一最高点。
[0128]
高差计算模块,具体包括:
[0129]
高差计算子模块,用于根据第一观测数据、第二观测数据、第三观测数据和第四观测数据进行水准测量的内业计算,利用公式
获得本次观测的两岸临时水准点的高差;
[0130]
其中,为本次观测的两岸临时水准点的高差,h2‑7为第一种连接线路时两岸临时水准点的高差,h7‑2为第二种连接线路时两岸临时水准点的高差,h2‑3为后视设站点和后视临时水准点的高差,h3‑4为后视设站点和后视中间棱镜点的高差,h4‑6为后视中间棱镜点和前视设站点的高差,h6‑7为前视设站点和前视临时水准点的高差,h7‑6为前视临时水准点和前视设站点的高差,h6‑5为前视设站点和前视中间棱镜点的高差,h5‑3为前视中间棱镜点和后视设站点的高差,h3‑2为后视设站点和后视临时水准点的高差;编号i的取值为2、3、4、6、7、6、5、3,对应的编号j的取值依次为3、4、6、7、6、5、3、2;h
i
‑
j
为i和j的高差,d
i
、d
j
分别为i和j的平距,α
i
、α
j
分别为i和j的垂直角,r为地球平均曲率半径,k
i
、k
j
分别为i和j处的大气折光系数,v
i
、v
j
分别为i和j处的棱镜高;后视设站点、后视临时水准点和后视中间棱镜点为同一河岸布设的点位,前视设站点、前视临时水准点和前视中间棱镜点为对岸布设的点位。
[0131]
系统还包括:
[0132]
仪器互换模块,用于将两岸的全站仪、棱镜互换,返回步骤“在两岸的设站点分别架设全站仪,并在两岸的中间棱镜点分别架设棱镜”,获得下次观测的两岸临时水准点的高差;
[0133]
最终高差确定模块,用于将本次观测的两岸临时水准点的高差和下次观测的两岸临时水准点的高差的平均值确定为两岸临时水准点的最终高差。
[0134]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0135]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1