定位目标点的方法及其装置及放电点的确定方法与流程
1.本发明具体涉及一种定位目标点的方法及包含所述定位目标点的方法的变压器中放电点的确定方法,以及,定位目标点的装置。
背景技术:
2.现有技术中,常采用最小时延法(v形曲线法)、三角形电
‑ꢀ
声时延定位法(球面定位法)、多点电-声时延定位法(球面定位法)、多点电-声时延定位(球面定位法)等方法对局部放电点进行超声定位,但是上述方法操作复杂,专业性强。
技术实现要素:
3.本发明所要解决的技术问题是针对现有技术中存在的上述不足,提供一种定位目标点的方法及包含所述定位目标点的方法的变压器中放电点的确定方法,以及,定位目标点的装置,所述定位目标点的方法操作简单,能够缩短定位时间,减少定位处理周期,降低能源消耗。
4.为解决上述技术问题,本发明采用如下技术方案:
5.一种定位目标点的方法,包括以下步骤:
6.获取任一平面上的平衡点,并获取平衡点与目标点之间的距离值,所述平衡点为该平面上与目标点的距离最小的点;
7.以平衡点为坐标原点,在所述平面内设置第一直角坐标系,并分别在所述第一直角坐标系的两个坐标轴上、坐标原点的两侧各设置至少一个参照点,并获取参照点与目标点之间的距离值;
8.根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标。
9.优选的,根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标,具体包括:
10.从第一直角坐标系的坐标原点出发,在垂直于第一直角坐标系的x轴和z轴的方向设置y轴,并设定x轴和y轴所在的平面为第一平面,y轴与z轴所在的平面为第二平面,第二平面垂直于第一平面,
11.设定第一直角坐标系的x轴上的参照点为第一参照点,第一直角坐标系的z轴上的参照点为第二参照点,
12.以所述第一直角坐标系的x轴上的第一参照点为圆心,以第一参照点以及与目标点之间的距离值为半径,在所述第一平面上画第一弧线,以及,以坐标原点为圆心,以坐标原点与目标点之间的距离值为半径,在所述第一平面上画第二弧线,第一弧线与第二弧线的交点即为目标点在所述第一平面内的位置。
13.优选的,根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标,还包括:
14.以第一直角坐标系的z轴上的第二参照点为圆心,以第二参照点以及与目标点之间的距离值为半径,在第二平面上画第三弧线,以及,以坐标原点为圆心,以坐标原点与目标点之间的距离值为半径,在第二平面上画第四弧线,第三弧线与第四弧线的交点即为目标点在第二平面内的位置。
15.优选的,根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标,还包括:
16.在第一直角坐标系所处的平面内再次选取坐标原点,并在该平面内建立第二直角坐标系,其中,第二直角坐标系的x’轴与x 轴平行,z’轴与z轴平行,并测量各个第一参照点、第二参照点和平衡点在第二直角坐标系的坐标,并结合目标点在第一平面和第二平面内的位置,得到目标点的坐标。
17.优选的,获取任一平面上的平衡点,具体为:
18.s1:在任一平面上的第一方向上设置第一直线,并在第一直线上选取多个第一检测点,通过超声探头测量其与目标点之间的距离,以确定出第一直线上与目标点距离最近的点,该点为第一确定点;
19.s2:在所述平面上选取第二方向,所述第二方向与第一方向垂直,并在第二方向上设置第二直线,并以第一确定点为坐标原点,以第一直线和第二直线为两个坐标轴,建立直角坐标系,在第一确定点的两侧的第二直线上选取多个第二检测点,通过超声探头测量其与目标点之间的距离,以确定出第二直线上与目标点距离最近的点,该点为第二确定点;
20.s3:若第二确定点与目标点的距离=第一确定点与目标点的距离,则确定第一确定点为所述平衡点;
21.若第二确定点与目标点的距离<第一确定点与目标点的距离,则以第二确定点为坐标原点,在第一方向上设置第三直线,以第二直线与第三直线为两个坐标轴建立直角坐标系,并在第二确定点的两侧的第三直线上选取多个第三检测点,通过超声探头测量其与目标点之间的距离,以确定第三直线上与目标点距离最近的点,该点为重置的第一确定点,并重复步骤s2和步骤s3,直至得到平衡点。
22.优选的,在步骤s1之前,还包括:
23.采用超声探头在选取的任一平面上确定所述超声探头的有效探测区,在所述有效探测区内设置所述第一直线。
24.优选的,以平衡点为坐标原点,在所述平面内设置第一直角坐标系,并分别在所述第一直角坐标系的两个坐标轴上、坐标原点的两侧各设置至少一个参照点,并获取参照点与目标点之间的距离值,具体包括:
25.以平衡点为坐标原点,设置第一直角坐标系,其中,在第一直角坐标系的x轴上、坐标原点的两侧各设置至少一个第一参照点,通过超声探头测量各个第一参照点与目标点之间的距离,以得到第一参照点与目标点之间的距离值,以及,
26.在平面第一直角坐标系的z轴上、坐标原点的两侧各设置至少一个第二参照点,通过超声探头测量各个第二参照点与目标点之间的距离,以得到第二参照点与目标点之间的距离值。
27.本发明还提供了一种变压器中放电点的确定方法,采用上述的定位目标点的方法来定位变压器的放电点,
28.其中,所述平衡点所在平面为变压器箱壁壁面,所述目标点为放电点。
29.优选的,在采用上述的定位目标点的方法来确定变压器的放电点之前,还包括:
30.通过电气定位法来预确定放电点在变压器中的位置范围。
31.本发明还提供了一种定位目标点的装置,包括获取模块、测量模块和确定模块,
32.所述获取模块,用于获取任一平面上的平衡点,并获取平衡点与目标点之间的距离值,所述平衡点为该平面上与目标点的距离最小的点;
33.所述测量模块,用于以平衡点为坐标原点,在所述平面内设置第一直角坐标系,并分别在所述第一直角坐标系的两个坐标轴上、坐标原点的两侧各设置至少一个参照点,并获取参照点与目标点之间的距离值;
34.所述确定模块,用于根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标。
35.本发明的定位目标点的方法通过获取任一平面上的平衡点,并以该平衡点作为坐标原点设置第一直角坐标系,并根据设置在第一直角坐标系坐标轴上的参照点,根据坐标原点、参照点、坐标原点与目标点的距离以及参照点与目标点的距离,确定目标点的坐标,操作步骤简单,便于使用人员掌握技巧和操作方法,且可缩短定位时间,减少定位处理周期,降低能源消耗。
36.本发明的变压器中放电点的确定方法通过采用上述定位目标点的方法,能够快速对变压器中放电点的位置进行确定,且对放电点的定位精准,能够提高对放电点定位的准确度,且适用于制造厂和现场设备出现局放异常时对放电点的检测。
37.本发明的定位目标点的装置结构简单,便于操作,能够快速对目标点进行确定。
附图说明
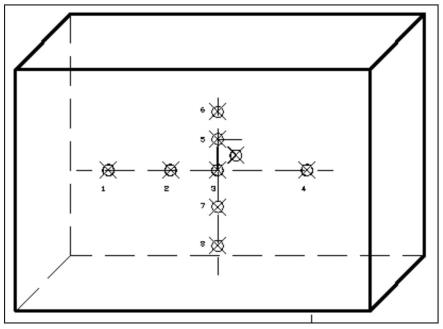
38.图1为本发明实施例中的变压器箱壁的测量点的位置示意图;
39.图2为本发明实施例中x轴上第一测量点与目标点的距离的示意图;
40.图3为本发明实施例中z轴上第二测量点与目标点的距离的示意图;
41.图4为本发明实施例中x-y平面上目标点的x-y坐标位置的示意图;
42.图5为本发明实施例中y-z平面上目标点的y-z坐标位置的示意图;
43.图6为本发明实施例中超声接收信号图;
44.图7为本发明实施例中x-y平面上目标点的x-y坐标位置的示意图;
45.图8为本发明实施例中y-z平面上目标点的y-z坐标位置的示意图。
具体实施方式
46.下面将结合本发明中的附图,对发明中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的范围。
47.本发明提供一种定位目标点的方法,包括以下步骤:
48.获取任一平面上的平衡点,并获取平衡点与目标点之间的距离值,所述平衡点为该平面上与目标点的距离最小的点;
49.以平衡点为坐标原点,在所述平面内设置第一直角坐标系,并分别在所述第一直角坐标系的两个坐标轴上、坐标原点的两侧各设置至少一个参照点,并获取参照点与目标点之间的距离值;
50.根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标。
51.本发明还提供一种变压器中放电点的确定方法,采用上述的定位目标点的方法来定位变压器的放电点,
52.其中,所述平衡点所在平面为变压器箱壁壁面,所述目标点为放电点。
53.本发明还提供一种定位目标点的装置,包括获取模块、测量模块和确定模块,
54.所述获取模块,用于获取任一平面上的平衡点,并获取平衡点与目标点之间的距离值,所述平衡点为该平面上与目标点的距离最小的点;
55.所述测量模块,用于以平衡点为坐标原点,在所述平面内设置第一直角坐标系,并分别在所述第一直角坐标系的两个坐标轴上、坐标原点的两侧各设置至少一个参照点,并获取参照点与目标点之间的距离值;
56.所述确定模块,用于根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标。
57.实施例1:
58.本实施例公开了一种超声定位放电点的方法,包括以下步骤:
59.获取任一平面上的平衡点,并获取平衡点与目标点之间的距离值,平衡点为该平面上与目标点的距离最小的点。
60.获取任一平面上的平衡点,具体为:
61.s1:在任一平面上的第一方向上设置第一直线,并在第一直线上选取多个第一检测点,通过超声探头测量其与目标点之间的距离,以确定出第一直线上与目标点距离最近的点,该点为第一确定点。
62.s2:在平面上选取第二方向,第二方向与第一方向垂直,并在第二方向上设置第二直线,并以第一确定点为坐标原点,以第一直线和第二直线为两个坐标轴,建立直角坐标系,在第一确定点的两侧的第二直线上选取多个第二检测点,通过超声探头测量其与目标点之间的距离,以确定出第二直线上与目标点距离最近的点,该点为第二确定点。
63.s3:若第二确定点与目标点的距离=第一确定点与目标点的距离,则确定第一确定点为平衡点;
64.若第二确定点与目标点的距离<第一确定点与目标点的距离,则以第二确定点为坐标原点,在第一方向上设置第三直线,以第二直线与第三直线为两个坐标轴建立直角坐标系,并在第二确定点的两侧的第三直线上选取多个第三检测点,通过超声探头测量其与目标点之间的距离,以确定第三直线上与目标点距离最近的点,该点为重置的第一确定点,并重复步骤s2和步骤s3,直至得到平衡点。
65.优选的,在步骤s1之前,还包括:
66.采用超声探头在选取的任一平面上确定超声探头的有效探测区,在有效探测区内设置第一直线。
67.如图1所示,以平衡点为坐标原点,在平面内设置第一直角坐标系,并分别在第一
直角坐标系的两个坐标轴上、坐标原点的两侧各设置至少一个参照点,并获取参照点与目标点之间的距离值。
68.具体的,以平衡点为坐标原点,设置第一直角坐标系,其中,在第一直角坐标系的x轴上、坐标原点的两侧各设置至少一个第一参照点,如图2所示,通过超声探头测量各个第一参照点与目标点之间的距离,以得到第一参照点与目标点之间的距离值。
69.在平面第一直角坐标系的z轴上、坐标原点的两侧各设置至少一个第二参照点,如图3所示,通过超声探头测量各个第二参照点与目标点之间的距离,以得到第二参照点与目标点之间的距离值。
70.本实施例中,在x轴和z轴上,且在坐标原点的两侧各设置一个参照点,进行五点定位(五点为:在x轴上、坐标原点两侧的两个点;在z轴上、坐标原点两侧的两个点,以及,坐标原点)。
71.本实施例中,平面设置为竖直平面,x轴设置在竖直平面的水平方向上,z轴设置在竖直平面的竖直方向上。
72.根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标。
73.从第一直角坐标系的坐标原点出发,在垂直于第一直角坐标系的x轴和z轴的方向设置y轴,并设定x轴和y轴所在平面为第一平面,y轴和z轴所在的平面为第二平面,第二平面垂直于第一平面。
74.并设定第一直角坐标系的x轴上的参照点为第一参照点,第一直角坐标系的z轴上的参照点为第二参照点。
75.具体的,如图4所示,以第一直角坐标系的x轴上的第一参照点为圆心,以第一参照点以及与目标点之间的距离值为半径,在第一平面上画第一弧线,以及,以坐标原点为圆心,以坐标原点与目标点之间的距离值为半径,在第一平面上画第二弧线,第一弧线与第二弧线的交点即为目标点在第一平面内的位置。
76.如图5所示,以第一直角坐标系的z轴上的第二参照点为圆心,以第二参照点以及与目标点之间的距离值为半径,在第二平面上画第三弧线,以及,以坐标原点为圆心,以坐标原点与目标点之间的距离值为半径,在第二平面上画第四弧线,第三弧线与第四弧线的交点即为目标点在第二平面内的位置。
77.当然,确定目标点的坐标时,也可以先以第一直角坐标系的 z轴上的第二参照点为圆心,以第二参照点以及与目标点之间的距离值为半径,在第二平面上画第三弧线,以及,以坐标原点为圆心,以坐标原点与目标点之间的距离值为半径,在第二平面上画第四弧线,第三弧线与第四弧线的交点即为目标点在第二平面内的位置。
78.然后,以第一直角坐标系的x轴上的第一参照点为圆心,以第一参照点以及与目标点之间的距离值为半径,在第一平面上画第一弧线,以及,以坐标原点为圆心,以坐标原点与目标点之间的距离值为半径,在第一平面上画第二弧线,第一弧线与第二弧线的交点即为目标点在第一平面内的位置。
79.随后,在第一直角坐标系所处的平面内再次选取坐标原点,并在第一平面内建立第二直角坐标系,第二直角坐标系的x’轴与第一直角坐标系的x轴平行,z’轴与第一直角坐标系的z轴平行,并测量各个第一参照点、第二参照点和平衡点在第二直角坐标系的坐标,
并结合目标点在第一平面和第二平面内的位置,得到目标点的坐标。
80.本实施例中,重新选取坐标原点并建立第二直角坐标系,用于确定目标点的整体坐标。
81.本实施例中,在第一直角坐标系所处的平面为长方形时,坐标原点则选取在长方形的第一平面的相邻两个边的交点上,以便根据实际测量面和测量位置确定五个点在第一平面上的坐标位置。
82.优选的,坐标原点选取在四个交点中距离五个参照点较近的交点,以减少测量的误差,提高测量的精确度。
83.本实施例的定位目标点的方法操作步骤简单,便于使用人员掌握技巧和操作方法,且可缩短定位时间,减少定位处理周期,降低能源消耗。
84.实施例2:
85.本实施例公开了一种变压器中放电点的确定方法,采用实施例1中的定位目标点的方法来定位变压器的放电点,其中,平衡点所在平面为变压器箱壁壁面,目标点为放电点。
86.本实施例中,在获取变压器箱壁壁面上的平衡点时,第一方向采用水平方向,并在水平方向上的第一直线上确定第一确定点。
87.第二方向采用竖直方向,并在竖直方向上的第二直线上确定第二确定点。并根据第一确定点和第二确定点得到平衡点。
88.本实施例中,以平衡点为坐标原点,并在变压器箱壁壁面内设置第一直角坐标系,其中,第一直角坐标系中的x轴设置为变压器箱壁壁面的水平方向,z轴设置为变压器箱壁壁面的竖直方向。并在坐标原点两侧的x轴上各设置至少一个第一参照点,在坐标原点两侧的z轴上各设置至少一个第二参照点。
89.本实施例中,在x轴上、坐标原点两侧各设置一个第一参照点,在z轴上、坐标原点两侧各设置一个第二参照点。
90.具体的,采用超声探头在变压器的箱壁上探测,以确定超声探头的有效探测区。
91.然后在水平方向确定第一确定点:在有效探测区内,沿水平方向的第一直线上选取多个第一检测点,如图1所示,在第一直线上选择了4个第一检测点,采用超声探头测量各第一检测点与放电点的距离分别为r1、r2、r3、r4,如图2所示,第一直线上测量的各第一检测点距放电点最近点为第三点,其与放电点的距离是r3,则第三点为第一确定点。
92.随后在竖直方向上确定第二确定点:以图2中的第三点为坐标原点,水平方向的第一直线为x轴,竖直方向的第二直线为z 轴,做直角坐标系,并在z轴上,且第三点的上侧和下侧选择多个第二检测点,并测量其与放电点之间的距离,本实施例中,在第二直线上选取了4个第二检测点,其中,第二直线上的各第二检测点以及坐标原点与放电点的距离分别r5、r6、r7、r8、r3,如图3所示,由于r5=r3,距放电源最近点可以选第五点,也可以选第三点,通常选择第三点作为距放电源最近点,第三点也为第二直线上的第二确定点,则将第三点作为变压器侧壁上与放电点的距离最小的点,即第三点为平衡点。
93.若在竖直方向的与放电点最近点为第七点,则需要通过第七点作水平方向的第三直线,并在第三直线上选择多个第三检测点进行测量,以探测量到第三直线距放电点的最近点(水平方向上第二次的最近点,即重置的第一确定点),重复上述过程,直至在直角坐标
系中的两个坐标轴中的确定点与放电点的距离相同,以确定变压器箱壁上与放电点的距离最小的点,得到平衡点。
94.利用水平方向上(x轴)的第一参照点,在x-y平面(第一平面)画弧形,以确定放电点的x-y坐标:
95.以第三点作为平衡点,并将平衡点设置为坐标原点,与垂直于x轴和z轴的方向设置y轴,以设置笛卡尔坐标系。其中,笛卡尔坐标系的原点设置在第三点(0,0,0),以水平方向上的各个第一参照点以及坐标原点为圆心,并分别以各点距放电点的距离为半径,在x-y平面画弧线,得到交点,该交点即为放电点p 在坐标系x-y平面的位置和坐标,该坐标显示出放电点距离箱壁的距离(y轴的坐标),和偏离坐标原点的左右距离(x轴的坐标)。
96.其中,放电点p在平衡点右侧为+x,在平衡点左侧为-x,若放电源p点位置如图4所示,则确定p点的局部坐标x和y。
97.利用竖直方向上(z轴)的第二参照点,在y-z平面(第二平面)画弧形,以确定放电点的y-z坐标:
98.以第三点作为平衡点,并将笛卡尔坐标系的原点设置在第三点(0,0,0),以竖直方向上的各个第二参考点及坐标原点为圆心,并分别与各点距放电点的距离为半径,在y-z平面画弧形,得到交点,该交点即为放电源p点在坐标系y-z平面的位置和坐标。该坐标显示出放电点距离箱壁的距离(y轴的坐标),和偏离原点的高度距离(z轴的坐标)。
99.其中,放电点p在平衡点上部为+z,在平衡点下部为-z。若放电源p在y-z平面的位置如图5所示,则确定p点的局部坐标 y和z。
100.其中,两次确定的y轴的坐标y的数值相同或相近,而图4 中确定的x轴上的坐标x与y轴的坐标y互不干扰。
101.通过上述步骤测量与画图,得到放电点p的局部坐标位置为 p(x,y,z),能够根据该方法得到的放电点p的局部坐标位置,为了得到放电点p的整体坐标,还需要在第一直角坐标系所处的平面内再次选取坐标原点,并在该平面内建立第二直角坐标系,第二直角坐标系的x’轴与x轴平行,z’轴与z轴平行,并测量各个第一参照点、第二参照点和平衡点在第二直角坐标系的坐标,并结合目标点在第一平面和第二平面内的位置,得到目标点p的整体坐标p(x’,y’,z’)。
102.根据目标点p的整体坐标p(x’,y’,z’)倒推各探测点之间的距离的测量是否准确,即各参考点之间的距离测试是否正确,若这个距离测试准确,就能够确保画图得到的的放电点位置的准确性,因此,利用该方法得到的局部坐标能够提高对有效探测点坐标的测量准确度,从而提高放电源位置整体坐标p(x’,y’,z’) 的准确度。
103.本实施例中,利用超声探头测量各点与放电点之间的距离采用电声定位法进行测量,其中,电声定位法需要确保采用的超声探头能接收到足够强的放电信号,且变压器内部放电产生的超声波能够通过变压器油和绝缘介质传到油箱壁。
104.本实施例中,超声探头采用保定天威保变新域科技有限公司生产的twpd-2多通道数字式局放放电综合分析仪自带的 twae-ci08超声探头。
105.图6为超声探头接收的信号图,其中,超声探头为twae-ci08 超声探头,图中,该超声探头接收到放电点传输到箱壁上超声探头放置位置的距离传输时间和距离分别是0.5179ms和0.725m。
106.本实施例中,在采用实施例1中的定位目标点的方法来确定变压器的放电点之前,还包括:通过电气定位法来预确定放电点在变压器中的位置范围。
107.具体的,第一步:通过电气定位法,以预确定放电点在变压器中的位置范围。
108.通过电气定位法能够大致确定放电点的位置,明确放电点处于中压端子、高压端子、低压端子、铁芯还是夹件中。
109.本实施例中,电气定位法采用gb/t1094.3-2003附录a 5中的步骤进行操作。
110.第二步:查看产品结构图,熟悉产品结构,以了解产品器身结构和引出线位置,并结合电气定位的结果,预估可能放电点的位置用于进行下一步的超声定位操作。
111.第三步:检查超声探头的状态,无异常则将其放置至可能放电点的位置,测量是否有明显的超声信号,如无明显的超声信号,则不断移动超声探头,直至接收到明显的超声信号,此时应记录测量位置,超声图谱和测试距离。
112.其中,在进行超声定位操作前,超声探头上需涂抹粘合剂,且在超声定位操作的过程中,超声探头与油箱之间需保证有粘合剂填充,以确保两者可靠接触。
113.第四步:通过移动超声探头,并分析测试数据,确定信号最强点及最短距离,即为平衡点和平衡点与放电点的之间的距离值。
114.第五步:确定平衡点后,以平衡点为坐标原点设置第一直角坐标系,并在两个坐标轴上,且在平衡点的两侧各测试一点,形成十字形参照点。
115.第六步:在油箱测试面选择合适的坐标原点,如油箱上沿或者下沿位置取作为坐标原点,以坐标原点为基准,测量上述五点的三维坐标(x’,y’,z’),其中,x’为油箱长轴方向长度,y’为油箱短轴方向长度(若选取的油箱测试面为x-z平面,则y’一般为零),z’为油箱高度方向长度,用于确定实际放电点p的三维坐标。
116.第七步:利用画图软件确认最终故障点及其坐标,在图纸上找到具体放电位置。
117.第八步:将测试结果告知相关部门,处理确认。
118.如图7和图8所示,为实际故障产品通过五点定位法,通过实际测试数据采用画图法得到的放电点位置三维坐标,其中,取变压器的上节油箱箱壁测量面的左下沿为坐标原点,如图7所示,放电点p相对于选取的坐标原点,其x’为326cm,y’为75cm,如图8所示,放电点相对于选取的坐标原点,其y’为72cm,z
’ꢀ
172cm,则放电点的坐标为:x’为326cm,y’为72-75cm,z’为172cm,在检查时,在y’的区间范围内查找放电点。其中,图 7中的y’为75cm,图8中的y’为72cm是由于坐标原点与参照点之间的距离在测量时导致的测量误差。
119.本实施例的变压器中放电点的确定方法通过采用上述定位目标点的方法,能够快速对变压器中放电点的位置进行确定,且对放电点的定位精准,能够提高对放电点定位的准确度,且适用于制造厂和现场设备出现局放异常时对放电点的检测。
120.实施例3:
121.本实施例公开了一种定位目标点的装置,包括获取模块、测量模块和确定模块。
122.其中,获取模块,用于获取任一平面上的平衡点,并获取平衡点与目标点之间的距离值,平衡点为该平面上与目标点的距离最小的点。
123.测量模块,用于以平衡点为坐标原点,在平面内设置第一直角坐标系,并分别在第一直角坐标系的两个坐标轴上、坐标原点的两侧各设置至少一个参照点,并获取参照点与目标点之间的距离值。
124.确定模块,用于根据平衡点、参照点、平衡点与目标点之间的距离值以及参照点与目标点之间的距离值,确定目标点的坐标。
125.本实施例中的定位目标点的装置结构简单,便于操作,能够快速对目标点进行确定。
126.可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1